
A Low-Cost Virtual Sensor for Underwater pH Monitoring in Coastal Waters





Abstract
:1. Introduction
- Test a virtual pH sensor with low maintenance and low cost in laboratory conditions for future use in water quality monitoring in natural water bodies.
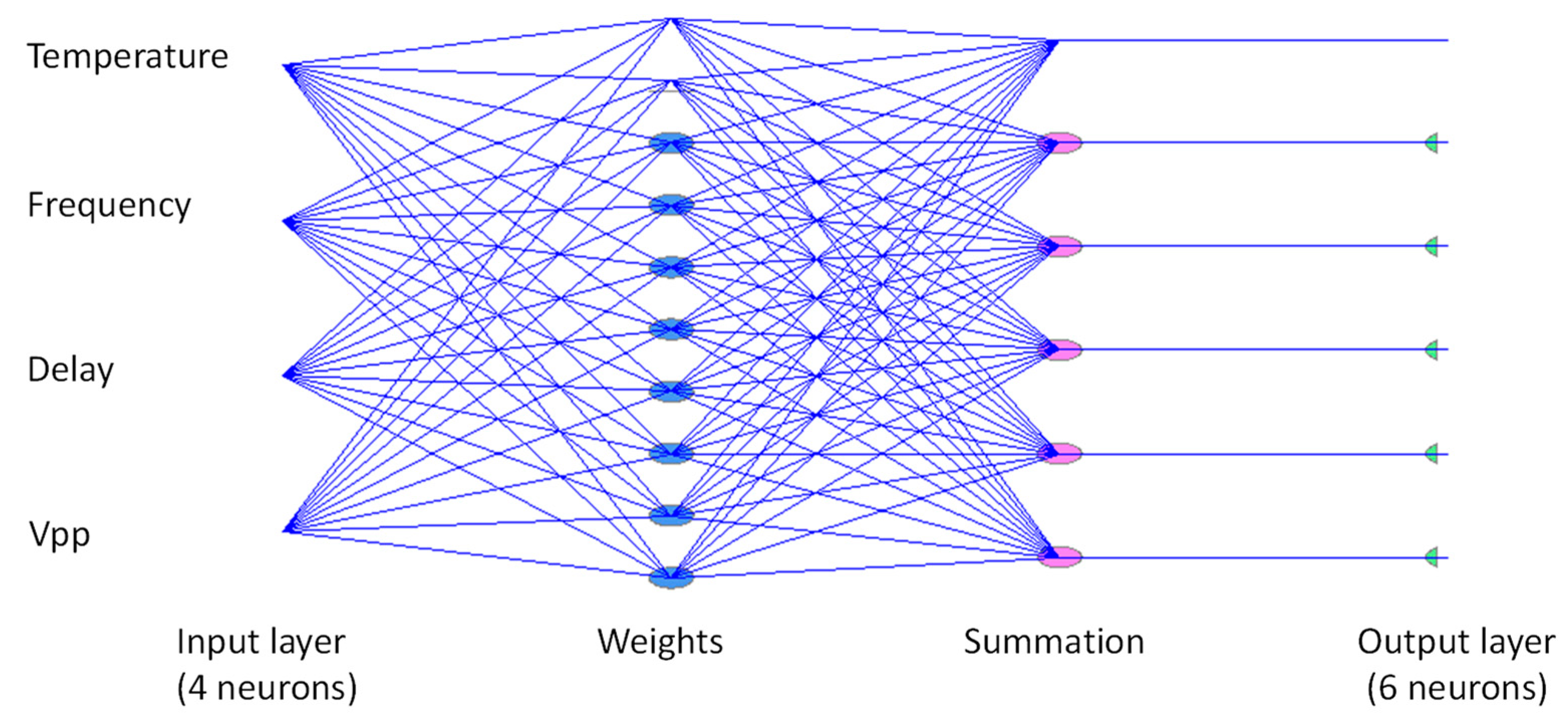
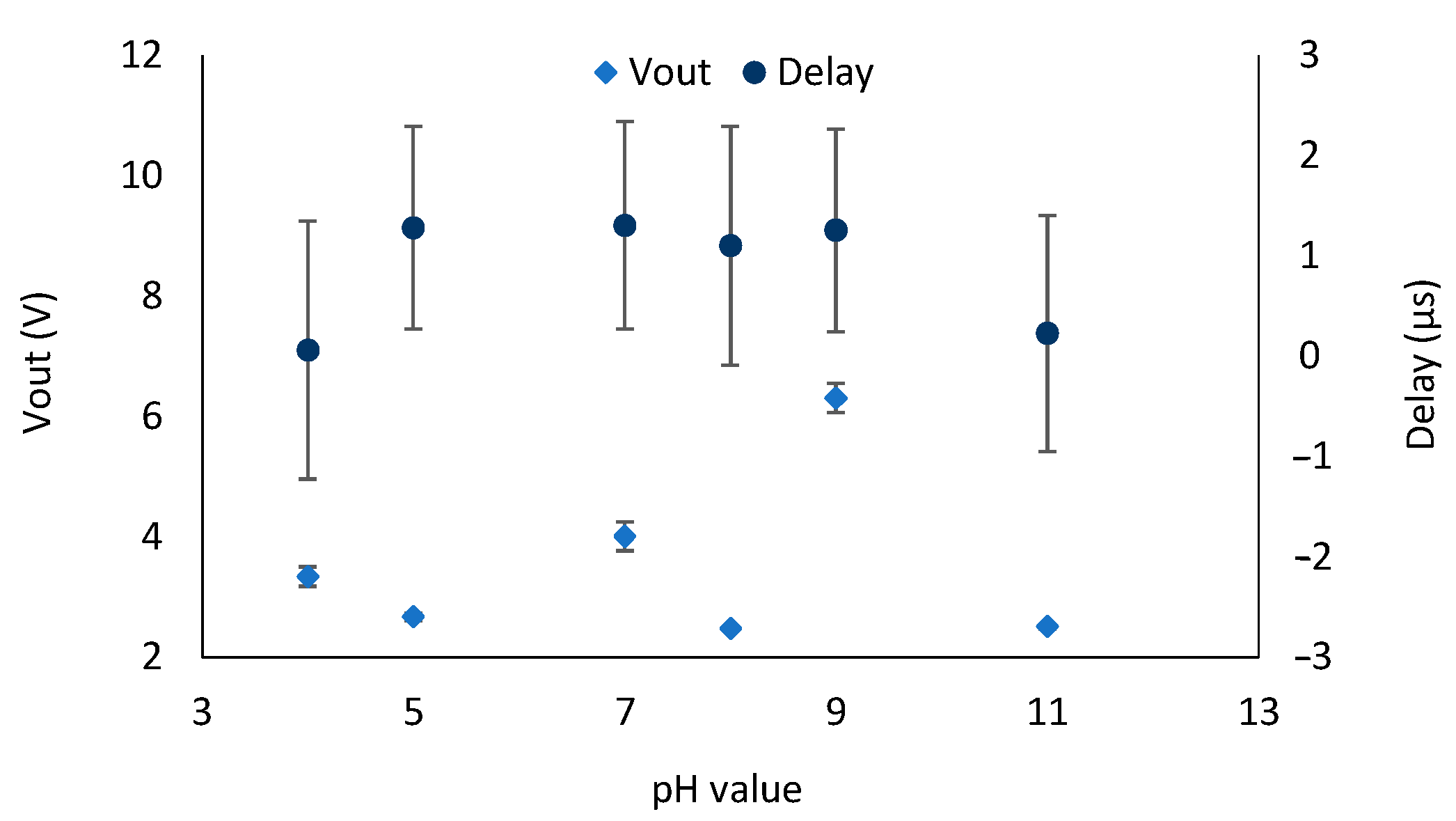
- Evaluate if measuring the Vpp and delay of a generated magnetic field of a water core coil can be used as input data for the virtual pH sensor.
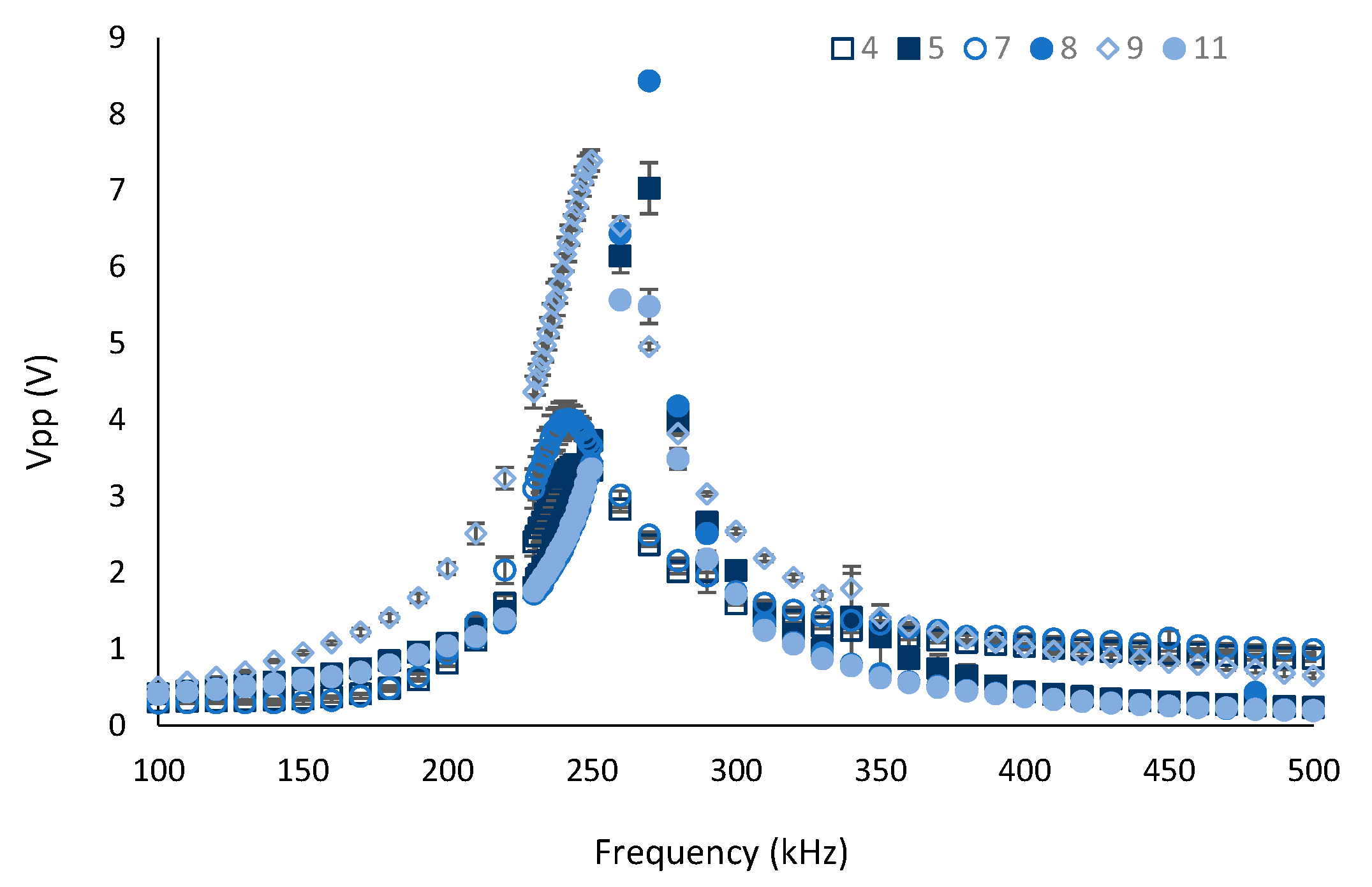
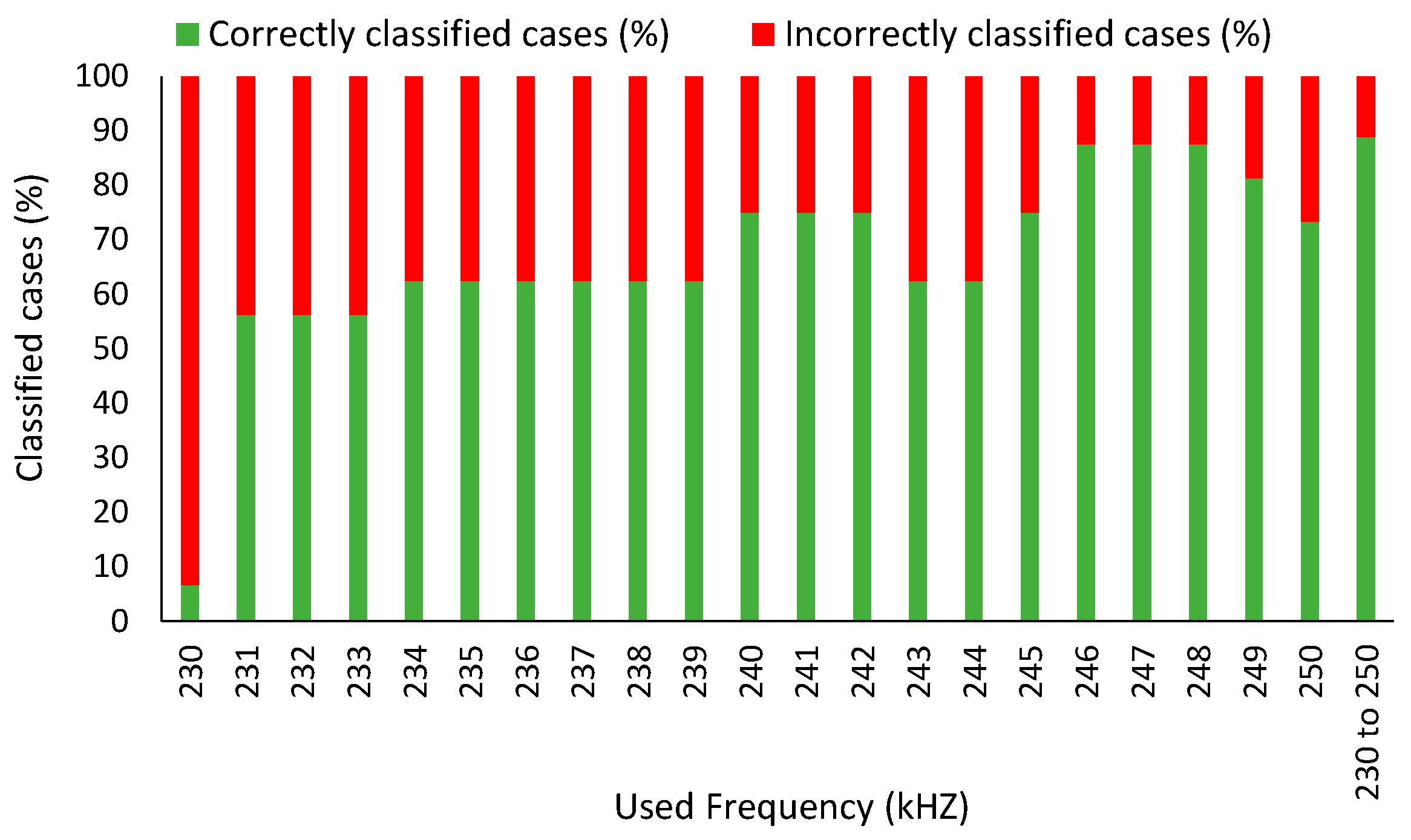
- Identify the most suitable frequency for the inductor operation.
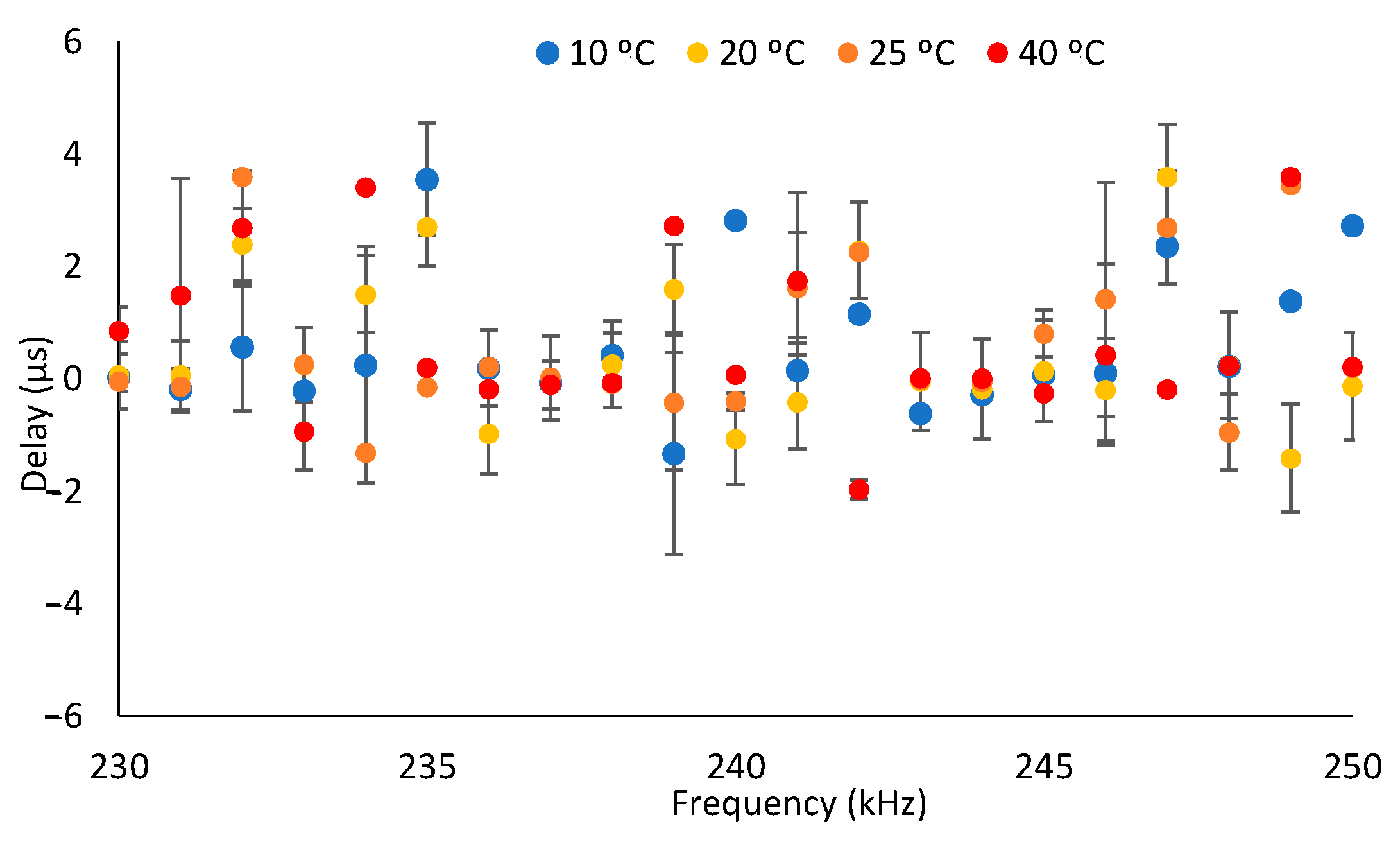
- Assess any potential effect of temperature in the virtual sensor to determine whether temperature correction is necessary.
2. Materials and Methods
2.1. Laboratory Equipment
2.2. Reagents
2.3. Coil Description
2.4. Samples Preparation
2.5. Coil Powering
2.6. Measuring Procedure
2.7. Data Processing and Analyses
3. Results
3.1. General Overview of Results
3.2. ANOVAs and PNN with All the Data
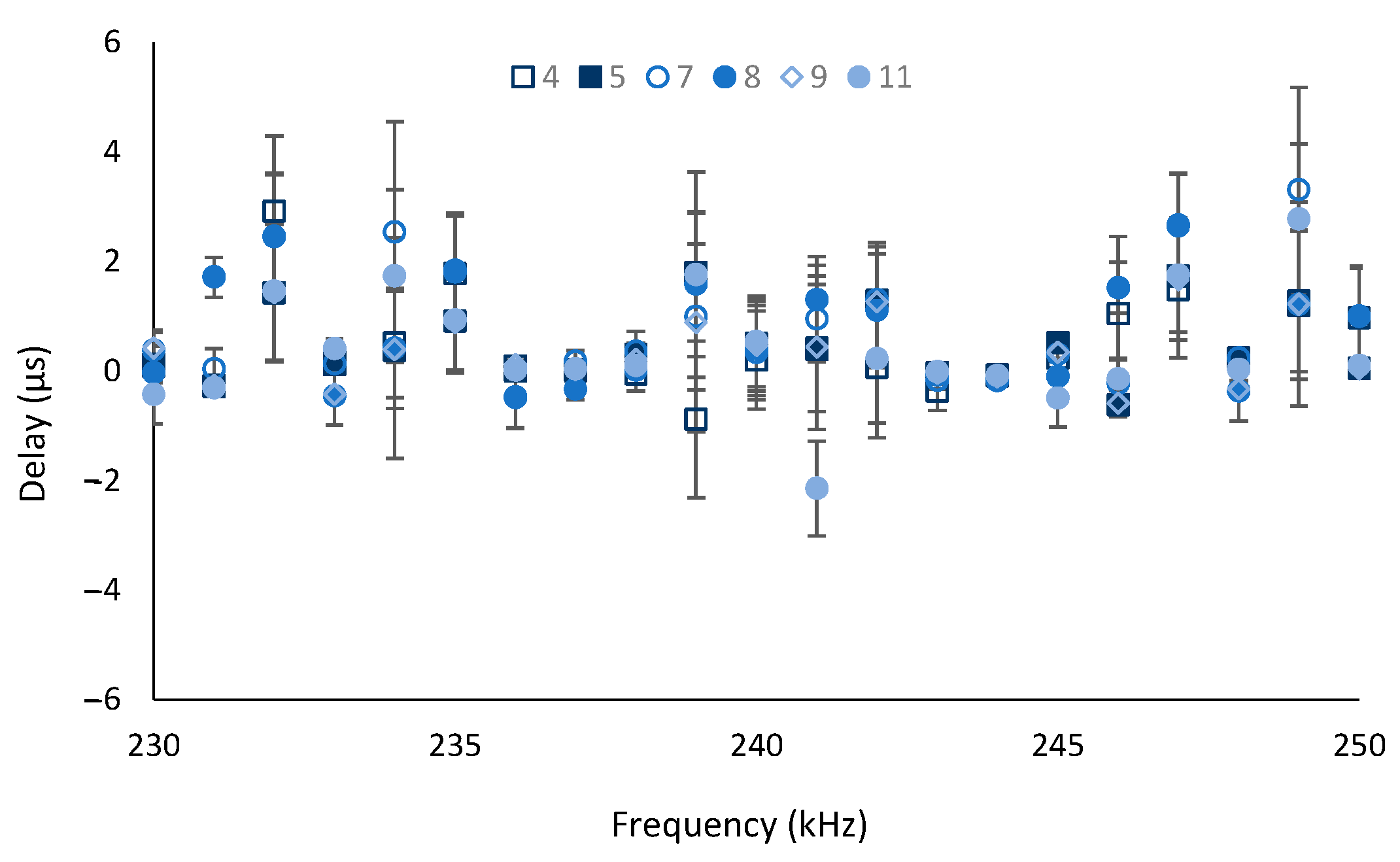
3.3. General Overview of Results of the Selected Range
3.4. ANOVAs and ANN with Selected Data
3.5. Verification with New Water Samples
4. Discussion
4.1. General Findings
- The use of Vpp and delay of the generated magnetic field of a water core coil used as input data for the PNN can serve as a virtual pH sensor, attaining 88.9% of correctly classified cases and 83% in the verification tests with new samples.
- The best WF for the inductor is 246, 247, and 248 kHz; any of these frequencies offer the same percentage of correctly classified cases in the PNN.
- The differences between using a single frequency, see frequencies above, and using a range of frequencies represent a decrease lower than 1.5% of the correctly classified cases with the PNN.
- Even though, according to two-way ANOVA results, the temperature significantly affects the variation of delay and Vpp, once data of both Vpp and delay are introduced in the PNN, the results improve when the temperature is excluded from the input neurons. The improvement of correctly classified cases when the temperature is excluded represents 43% when all data are used and 2% when selected data are used.
4.2. Limitations of Presented Results and Possible Future Solutions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Steinegger, A.; Wolfbeis, O.S.; Borisov, S.M. Optical Sensing and Imaging of pH Values: Spectroscopies, Materials, and Applications. Chem. Rev. 2020, 120, 12357–12489. [Google Scholar] [PubMed]
- Majhi, P.K.; Kothari, R.; Arora, N.K.; Pandey, V.C.; Tyagi, V.V. Impact of pH on Pollutional Parameters of Textile Industry Wastewater with Use of Chlorella pyrenoidosa at Lab-Scale: A Green Approach. Bull. Environ. Contam. Toxicol. 2021, 108, 485–490. [Google Scholar] [PubMed]
- Ziara, R.M.; Miller, D.N.; Subbiah, J.; Dvorak, B.I. Lactate wastewater dark fermentation: The effect of temperature and initial pH on biohydrogen production and microbial community. Int. J. Hydrogen Energy 2018, 44, 661–673. [Google Scholar]
- Galan, I.; Müller, B.; Briendl, L.G.; Mittermayr, F.; Mayr, T.; Dietzel, M.; Grengg, C. Continuous optical in-situ pH monitoring during early hydration of cementitious materials. Cem. Concr. Res. 2021, 150, 106584. [Google Scholar]
- Briendl, L.G.; Grengg, C.; Müller, B.; Koraimann, G.; Mittermayr, F.; Steiner, P.; Galan, I. In situ pH monitoring in accelerated cement pastes. Cem. Concr. Res. 2022, 157, 106808. [Google Scholar]
- Boczkaj, G.; Fernandes, A. Wastewater treatment by means of advanced oxidation processes at basic pH conditions: A review. Chem. Eng. J. 2017, 320, 608–633. [Google Scholar]
- Goulart, D.A.; Pereira, R.D. Autonomous pH control by reinforcement learning for electroplating industry wastewater. Comput. Chem. Eng. 2020, 140, 106909. [Google Scholar] [CrossRef]
- Sabzi, S.; Arribas, J.I. A visible-range computer-vision system for automated, non-intrusive assessment of the pH value in Thomson oranges. Comput. Ind. 2018, 99, 69–82. [Google Scholar]
- Pourdarbani, R.; Sabzi, S.; Kalantari, D.; Arribas, J.I. Non-destructive visible and short-wave near-infrared spectroscopic data estimation of various physicochemical properties of Fuji apple (Malus pumila) fruits at different maturation stages. Chemom. Intell. Lab. Syst. 2020, 206, 104147. [Google Scholar]
- Alizadeh-Sani, M.; Mohammadian, E.; Rhim, J.W.; Jafari, S.M. pH-sensitive (halochromic) smart packaging films based on natural food colorants for the monitoring of food quality and safety. Trends Food Sci. Technol. 2020, 105, 93–144. [Google Scholar]
- Tirtashi, F.E.; Moradi, M.; Tajik, H.; Forough, M.; Ezati, P.; Kuswandi, B. Cellulose/chitosan pH-responsive indicator incorporated with carrot anthocyanins for intelligent food packaging. Int. J. Biol. Macromol. 2019, 136, 920–926. [Google Scholar]
- Jiao, S.; Lu, Y. Soil pH and temperature regulate assembly processes of abundant and rare bacterial communities in agricultural ecosystems. Environ. Microbiol. 2019, 22, 1052–1065. [Google Scholar] [PubMed]
- Zhou, W.; Han, G.; Liu, M.; Li, X. Effects of soil pH and texture on soil carbon and nitrogen in soil profiles under different land uses in Mun River Basin, Northeast Thailand. PeerJ 2019, 7, e7880. [Google Scholar] [PubMed] [Green Version]
- Bouaroudj, S.; Menad, A.; Bounamous, A.; Ali-Khodja, H.; Gherib, A.; Weigel, D.E.; Chenchouni, H. Assessment of water quality at the largest dam in Algeria (Beni Haroun Dam) and effects of irrigation on soil characteristics of agricultural lands. Chemosphere 2018, 219, 76–88. [Google Scholar]
- van Rooyen, I.L.; Nicol, W. Optimal hydroponic growth of Brassica oleracea at low nitrogen concentrations using a novel pH-based control strategy. Sci. Total Environ. 2021, 775, 145875. [Google Scholar]
- Huan, J.; Li, H.; Wu, F.; Cao, W. Design of water quality monitoring system for aquaculture ponds based on NB-IoT. Aquac. Eng. 2020, 90, 102088. [Google Scholar]
- Gao, G.; Xiao, K.; Chen, M. An intelligent IoT-based control and traceability system to forecast and maintain water quality in freshwater fish farms. Comput. Electron. Agric. 2019, 166, 105013. [Google Scholar]
- Staudinger, C.; Strobl, M.; Breininger, J.; Klimant, I.; Borisov, S.M. Fast and stable optical pH sensor materials for oceanographic applications. Sensors Actuators B Chem. 2019, 282, 204–217. [Google Scholar]
- Jiang, L.-Q.; Carter, B.R.; Feely, R.A.; Lauvset, S.K.; Olsen, A. Surface ocean pH and buffer capacity: Past, present and future. Sci. Rep. 2019, 9, 18624. [Google Scholar]
- Wencel, D.; Abel, T.; McDonagh, C. Optical Chemical pH Sensors. Anal. Chem. 2013, 86, 15–29. [Google Scholar]
- Paepae, T.; Bokoro, P.N.; Kyamakya, K. From Fully Physical to Virtual Sensing for Water Quality Assessment: A Comprehensive Review of the Relevant State-of-the-Art. Sensors 2021, 21, 6971. [Google Scholar] [PubMed]
- Ren, J.; Liu, Y.; Wang, Z.; Chen, S.; Ma, Y.; Wei, H.; Lü, S. An Anti-Swellable Hydrogel Strain Sensor for Underwater Motion Detection. Adv. Funct. Mater. 2021, 32, 2107404. [Google Scholar] [CrossRef]
- Cao, Q.; Wang, R.; Zhang, T.; Wang, Y.; Wang, S. Hydrodynamic Modeling and Parameter Identification of a Bionic Underwater Vehicle: RobDact. Cyborg Bionic Syst. 2022, 2022, 9806328. [Google Scholar] [PubMed]
- Gola, K.K.; Gupta, B. Underwater sensor networks: ‘Comparative analysis on applications, deployment and routing techniques’. IET Commun. 2020, 14, 2859–2870. [Google Scholar]
- Levent, B.A.T.; Öztekin, A.; Şahin, F.; ARICI, E.; Özsandikçi, U. An overview of the Black Sea pollution in Turkey. Mediterr. Fish. Aquac. Res. 2018, 1, 66–86. [Google Scholar]
- Vikas, M.; Dwarakish, G. Coastal Pollution: A Review. Aquat. Procedia 2015, 4, 381–388. [Google Scholar] [CrossRef]
- Tornero, V.; Hanke, G. Chemical contaminants entering the marine environment from sea-based sources: A review with a focus on European seas. Mar. Pollut. Bull. 2016, 112, 17–38. [Google Scholar]
- Parra, L.; Lloret, G.; Lloret, J.; Rodilla, M. Physical Sensors for Precision Aquaculture: A Review. IEEE Sensors J. 2018, 18, 3915–3923. [Google Scholar]
- Available online: https://in-situ.com/pub/media/support/documents/AT-series-and-sensors_0222_F.pdf (accessed on 10 March 2023).
- Available online: https://www.hannainstruments.co.uk/electrodes-and-probes/2513-hi-12303-plastic-bodied-ph-temperature-probe (accessed on 10 March 2023).
- Available online: https://www.seba-hydrometrie.com/en/products?tx_sebaproducts_sebaproducts%5Baction%5D=show&tx_sebaproducts_sebaproducts%5Bcontroller%5D=Product&tx_sebaproducts_sebaproducts%5Bprimarycategory%5D=4&tx_sebaproducts_sebaproducts%5Bproduct%5D=34&cHash=30a32519c3a474c2a1dcd56cbca2b402 (accessed on 10 March 2023).
- Available online: https://uk.hach.com/ph-orp-sensors/combination-ph-orp-sensors/family-downloads?productCategoryId=25114174819 (accessed on 10 March 2023).
- Available online: https://www.aquas.com.tw/en/product-494933/pH-Analyzer-SMR04-series.html (accessed on 10 March 2023).
- Available online: https://www.ysi.com/product/id-605101/pro-series-1001-ph-sensor (accessed on 10 March 2023).
- Manjakkal, L.; Szwagierczak, D.; Dahiya, R. Metal oxides based electrochemical pH sensors: Current progress and future perspectives. Prog. Mater. Sci. 2020, 109, 100635. [Google Scholar]
- Ratajczak, M.; Wondrak, T. Analysis, design and optimization of compact ultra-high sensitivity coreless induction coil sensors. Meas. Sci. Technol. 2020, 31, 065902. [Google Scholar]
- Rohani, M.N.K.H.; Yii, C.C.; Isa, M.; Hassan, S.I.S.; Ismail, B.; Adzman, M.R.; Shafiq, M. Geometrical Shapes Impact on the Performance of ABS-Based Coreless Inductive Sensors for PD Measurement in HV Power Cables. IEEE Sens. J. 2016, 16, 6625–6632. [Google Scholar] [CrossRef]
- Parra, L.; Sendra, S.; Lloret, J.; Bosch, I. Development of a conductivity sensor for monitoring groundwater resources to optimize water management in smart city environments. Sensors 2015, 15, 20990–21015. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Harms, J.; Kern, T.A. Theory and Modeling of Eddy Current Type Inductive Conductivity Sensors. Eng. Proc. 2021, 6, 37. [Google Scholar]
- Parra, L.; Viciano-Tudela, S.; Carrasco, D.; Sendra, S.; Lloret, J. Low-Cost Microcontroller-Based Multiparametric Probe for Coastal Area Monitoring. Sensors 2023, 23, 1871. [Google Scholar] [PubMed]
- Jiang, Y.; Yin, S.; Dong, J.; Kaynak, O. A review on soft sensors for monitoring, control, and optimization of industrial processes. IEEE Sens. J. 2020, 21, 12868–12881. [Google Scholar]
- Dilmi, S. Calcium Soft Sensor Based on the Combination of Support Vector Regression and 1-D Digital Filter for Water Quality Monitoring. Arab. J. Sci. Eng. 2022, 1–26. [Google Scholar] [CrossRef]
- Thiruneelakandan, A.; Kaur, G.; Vadnala, G.; Bharathiraja, N.; Pradeepa, K.; Retnadhas, M. Measurement of oxygen content in water with purity through soft sensor model. Meas. Sensors 2022, 24, 100589. [Google Scholar]
- Paepae, T.; Bokoro, P.N.; Kyamakya, K. A Virtual Sensing Concept for Nitrogen and Phosphorus Monitoring Using Machine Learning Techniques. Sensors 2022, 22, 7338. [Google Scholar] [CrossRef]
- Nair, A.; Hykkerud, A.; Ratnaweera, H. Estimating Phosphorus and COD Concentrations Using a Hybrid Soft Sensor: A Case Study in a Norwegian Municipal Wastewater Treatment Plant. Water 2022, 14, 332. [Google Scholar] [CrossRef]
- Datasheet of HI98129. Available online: https://www.farnell.com/datasheets/42537.pdf. (accessed on 10 March 2023).
- Datasheet of VENTIX ST-9263A. Available online: https://br.omega.com/omegaFiles/temperature/pdf/TPD36_TPD37.pdf (accessed on 10 March 2023).
- Romero, O.; Miura, A.S.; Parra, L.; Lloret, J. Low-Cost System for Automatic Recognition of Driving Pattern in Assessing Interurban Mobility using Geo-Information. ISPRS Int. J. Geo Inf. 2022, 11, 597. [Google Scholar] [CrossRef]
- Chen, H.; Wang, J.; Shan, D.; Chen, J.; Zhang, S.; Lu, X. Dual-emitting fluorescent metal–organic framework nanocomposites as a broad-range pH sensor for fluorescence imaging. Anal. Chem. 2018, 90, 7056–7063. [Google Scholar] [PubMed]
- Wang, C.; Otto, S.; Dorn, M.; Heinze, K.; Resch-Genger, U. Luminescent TOP Nanosensors for Simultaneously Measuring Temperature, Oxygen, and pH at a Single Excitation Wavelength. Anal. Chem. 2019, 91, 2337–2344. [Google Scholar] [PubMed]
- Yang, J.; Cao, Y.; Si, W.; Zhang, J.; Wang, J.; Qu, Y.; Qin, W. Covalent Organic Frameworks Doped with Different Ratios of OMe/OH as Fluorescent and Colorimetric Sensors. Chemsuschem 2022, 15, e202200100. [Google Scholar] [PubMed]
- Rosmawani, M.; Musa, A. Sol-gel/chitosan hybrid thin film immobilised with curcumin as pH indicator for pH sensor fabrication. Malays. J. Anal. Sci. 2019, 23, 204–211. [Google Scholar]
- Min, J.Y.; Kim, H.J. Sol-Gel-based Fluorescent Sensor for Measuring pH Values in Acidic Environments. Bull. Korean Chem. Soc. 2020, 41, 691–696. [Google Scholar]
- Zhao, Y.; Lei, M.; Liu, S.-X.; Zhao, Q. Smart hydrogel-based optical fiber SPR sensor for pH measurements. Sens. Actuators B Chem. 2018, 261, 226–232. [Google Scholar]
- Manjakkal, L.; Dang, W.; Yogeswaran, N.; Dahiya, R. Textile-Based Potentiometric Electrochemical pH Sensor for Wearable Applications. Biosensors 2019, 9, 14. [Google Scholar]
- Žutautas, V.; Jelinskas, T.; Pauliukaite, R. A novel sensor for electrochemical pH monitoring based on polyfolate. J. Electroanal. Chem. 2022, 921, 116668. [Google Scholar]
- Diculescu, V.C.; Beregoi, M.; Evanghelidis, A.; Negrea, R.F.; Apostol, N.G.; Enculescu, I. Palladium/palladium oxide coated electrospun fibers for wearable sweat pH-sensors. Sci. Rep. 2019, 9, 1–12. [Google Scholar]
- Liu, B.; Zhang, J. A ruthenium oxide and iridium oxide coated titanium electrode for pH measurement. RSC Adv. 2020, 10, 25952–25957. [Google Scholar]
- Sahu, N.; Bhardwaj, R.; Shah, H.; Mukhiya, R.; Sharma, R.; Sinha, S. Towards Development of an ISFET-Based Smart pH Sensor: Enabling Machine Learning for Drift Compensation in IoT Applications. IEEE Sens. J. 2021, 21, 19013–19024. [Google Scholar] [CrossRef]
- Sutton, A.J.; Feely, R.A.; Maenner-Jones, S.; Musielwicz, S.; Osborne, J.; Dietrich, C.; Monacci, N.; Cross, J.; Bott, R.; Kozyr, A.; et al. Autonomous seawater pCO2 and pH time series from 40 surface buoys and the emergence of anthropogenic trends. Earth Syst. Sci. Data 2019, 11, 421–439. [Google Scholar]
- El Zrelli, R.; Rabaoui, L.; Alaya, M.B.; Daghbouj, N.; Castet, S.; Besson, P.; Michel, S.; Bejaoui, N.; Courjault-Radé, P. Seawater quality assessment and identification of pollution sources along the central coastal area of Gabes Gulf (SE Tunisia): Evidence of industrial impact and implications for marine environment protection. Mar. Pollut. Bull. 2018, 127, 445–452. [Google Scholar] [CrossRef]
- Zheng, C.-Q.; Jeswin, J.; Shen, K.-L.; Lablche, M.; Wang, K.-J.; Liu, H.-P. Detrimental effect of CO2-driven seawater acidification on a crustacean brine shrimp, Artemia sinica. Fish Shellfish. Immunol. 2015, 43, 181–190. [Google Scholar] [CrossRef]
- Ghoneim, M.T.; Nguyen, A.; Dereje, N.; Huang, J.; Moore, G.C.; Murzynowski, P.J.; Dagdeviren, C. Recent progress in electrochemical pH-sensing materials and configurations for biomedical applications. Chem. Rev. 2019, 119, 5248–5297. [Google Scholar]
- Salvo, P.; Melai, B.; Calisi, N.; Paoletti, C.; Bellagambi, F.; Kirchhain, A.; Trivella, M.; Fuoco, R.; Di Francesco, F. Graphene-based devices for measuring pH. Sens. Actuators B Chem. 2018, 256, 976–991. [Google Scholar]
- Avolio, R.; Grozdanov, A.; Avella, M.; Barton, J.; Cocca, M.; De Falco, F.; Dimitrov, A.T.; Errico, M.E.; Fanjul-Bolado, P.; Gentile, G.; et al. Review of pH sensing materials from macro- to nano-scale: Recent developments and examples of seawater applications. Crit. Rev. Environ. Sci. Technol. 2020, 52, 979–1021. [Google Scholar]
- Riaza, A.; Buzzi, J.; García-Meléndez, E.; Carrère, V.; Sarmiento, A.; Müller, A. Monitoring acidic water in a polluted river with hyperspectral remote sensing (HyMap). Hydrol. Sci. J. 2015, 60, 1064–1077. [Google Scholar] [CrossRef]
- Japitana, M.V.; Burce, M.E.C. A satellite-based remote sensing technique for surface water quality estimation. Eng. Technol. Appl. Sci. Res. 2019, 9, 3965–3970. [Google Scholar]
- Abdelmalik, K. Role of statistical remote sensing for Inland water quality parameters prediction. Egypt. J. Remote Sens. Space Sci. 2016, 21, 193–200. [Google Scholar]
- Harrison, J.W.; Lucius, M.A.; Farrell, J.L.; Eichler, L.W.; Relyea, R.A. Prediction of stream nitrogen and phosphorus concentrations from high-frequency sensors using Random Forests Regression. Sci. Total Environ. 2020, 763, 1430055. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Yu, H.; Li, X.; Zhou, J. Research on Anti-biofouling Technology of Ocean Observation Instruments based on Ultraviolet Method. In Proceedings of the 7th International Conference on Water Resource and Environment (WRE 2021), Islamabad, Pakistan, 29–30 December 2022; pp. 251–256. [Google Scholar]
- Ramirez, J.P.; Stefanini, C.; De Masi, G.; Romano, D. Design of Magnetic Coupling-Based Anti-Biofouling Mechanism for Underwater Optical Sensors. In OCEANS 2022-Chennai; IEEE: New York, NY, USA, 2022; pp. 1–6. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coil | Section (mm) | Length (mm) | Wire Section (mm) | N°. Spires | Material |
|---|---|---|---|---|---|
| Powered | 25 | 32 | 0.4 | 80 | Enameled copper wire |
| Induced | 25 | 16 | 0.4 | 40 | Enameled copper wire |
| Integer Value of pH for the Analyses | pH of Samples for Each Temperature | |||
|---|---|---|---|---|
| 10 | 20 | 25 | 40 | |
| 4 | 4.1 | 4.0 | 4.18 | 4.24 |
| 5 | 5.3 | 5.2 | 5.1 | 5.3 |
| 7 | 6.9 | 6.9 | 6.96 | 7.02 |
| 8 | 7.98 | 8.03 | 7.9 | 8.0 |
| 9 | 8.98 | 8.73 | 8.8 | 8.92 |
| 11 | 10.85 | 10.98 | 11.0 | 10.94 |
| Source of Variation | SS (/107) | Df | MS(/105) | F | p-Value 1 |
|---|---|---|---|---|---|
| Temperature | 1.31835 | 3 | 43.945 | 8.38 | <0.0000 |
| pH | 40.3099 | 5 | 806.197 | 153.71 | <0.0000 |
| Frequency | 259.894 | 58 | 448.093 | 85.43 | <0.0000 |
| Error | 64.5657 | 1231 | 5.24498 | ||
| Total | 368.557 | 1297 |
| Temperature (°C) | Cases | Mean Vpp Value |
|---|---|---|
| 10 | 354 | 1837.21 a |
| 20 | 354 | 1956.36 b |
| 25 | 354 | 1965.19 b |
| 40 | 236 | 2152.07 c |
| pH | Cases | Mean Vpp Value |
|---|---|---|
| 11 | 177 | 1563.97 a |
| 8 | 177 | 1636.48 ab |
| 5 | 236 | 1676.77 ab |
| 4 | 236 | 1771.17 b |
| 7 | 236 | 2062.17 c |
| 9 | 236 | 3155.67 d |
| Source of Variation | SS SS (/107) | Df | MS SS (/106) | F | p-Value 1 |
|---|---|---|---|---|---|
| Temperature | 2.2366 | 3 | 7.45532 | 6.02 | 0.0005 |
| pH | 14.2699 | 5 | 28.5398 | 23.06 | <0.0000 |
| Frequency | 104.076 | 58 | 17.9442 | 14.50 | <0.0000 |
| Error | 152.37 | 1231 | 1.23778 | ||
| Total | 274.215 | 1297 |
| Temperature (°C) | Cases | Mean Vpp Value |
|---|---|---|
| 10 | 354 | 140.984 a |
| 25 | 354 | 269.954 ab |
| 40 | 236 | 411.832 bc |
| 20 | 354 | 473.888 c |
| pH | Cases | Mean Vpp Value |
|---|---|---|
| 11 | 177 | −0.560028 a |
| 8 | 177 | 0.161441 a |
| 5 | 236 | 82.464 a |
| 9 | 236 | 304.29 b |
| 7 | 236 | 778.511 c |
| 4 | 236 | 780.122 c |
| Current pH | Cases | Classified as pH | |||||
|---|---|---|---|---|---|---|---|
| 4 | 5 | 7 | 8 | 9 | 11 | ||
| 4 | 236 | 45.76% (108) | 0% | 46.19% (109) | 0.85% (2) | 6.36% (15) | 0.85% (2) |
| 5 | 236 | 1.27% (3) | 43.22% (102) | 0.85% (2) | 27.54% (65) | 6.36% (15) | 20.76% (49) |
| 7 | 236 | 49.15% (116) | 0.42% (1) | 44.07% (104) | 0.42% (1) | 5.93% (14) | 0% |
| 8 | 177 | 0.56% (1) | 23.16% (41) | 0% | 6.21% (11) | 2.82% (5) | 67.23% (119) |
| 9 | 236 | 8.47% (20) | 10.17% (24) | 9.75% (23) | 2.54% (6) | 68.64% (162) | 0.42% (1) |
| 11 | 177 | 0.56% (1) | 22.03% (39) | 0% | 66.10% (117) | 0% | 11.30% (20) |
| Total correctly classified 39.06% | |||||||
| Current pH | Cases | Classified as pH | |||||
|---|---|---|---|---|---|---|---|
| 4 | 5 | 7 | 8 | 9 | 11 | ||
| 4 | 236 | 62.29% (147) | 2.97% (7) | 30.93% (73) | 1.27% (3) | 1.69% (4) | 0.85% (2) |
| 5 | 236 | 2.54% (6) | 52.97% (125) | 2.97% (7) | 14.83% (35) | 6.78% (16) | 19.92% (47) |
| 7 | 236 | 27.12% (64) | 2.97% (7) | 66.10% (156) | 1.27% (3) | 2.12% (5) | 0.42% (1) |
| 8 | 177 | 2.26% (4) | 23.16% (15) | 0% | 44.07% (78) | 2.26% (4) | 42.94% (76) |
| 9 | 236 | 2.97% (7) | 8.05% (19) | 12.71% (30) | 6.78% (16) | 65.68% (155) | 3.81% (9) |
| 11 | 177 | 1.69% (3) | 12.99% (23) | 0.56% (1) | 66.10% (77) | 2.26% (4) | 38.98% (69) |
| Total correctly classified 56.24% | |||||||
| Current pH | Cases | Classified as pH | |||||
|---|---|---|---|---|---|---|---|
| 4 | 5 | 7 | 8 | 9 | 11 | ||
| 4 | 236 | 82.63% (195) | 0.42% (1) | 16.10% (38) | 0% | 0.42% (1) | 0.42% (1) |
| 5 | 236 | 0% | 63.14% (149) | 0.42% (1) | 13.56% (32) | 6.78% (16) | 16.10% (38) |
| 7 | 236 | 36.44% (86) | 0% | 61.02% (144) | 0% | 2.12% (5) | 0.42% (1) |
| 8 | 177 | 0.56% (1) | 2.26% (4) | 0% | 75.14% (133) | 0.56% (1) | 21.47% (38) |
| 9 | 236 | 3.81% (9) | 2.12% (5) | 2.54% (6) | 0% | 91.53% (216) | 0% |
| 11 | 177 | 0.56% (1) | 5.65% (10) | 0.56% (1) | 26.55% (47) | 0% | 66.67% (118) |
| Total correctly classified 73.57% | |||||||
| Current pH | Cases | Classified as pH | |||||
|---|---|---|---|---|---|---|---|
| 4 | 5 | 7 | 8 | 9 | 11 | ||
| 4 | 236 | 73.73% (174) | 3.81% (9) | 19.49% (46) | 0.42% (1) | 1.27% (3) | 1.27% (3) |
| 5 | 236 | 1.27% (12) | 55.93% (132) | 3.39% (8) | 10.17% (24) | 8.90% (21) | 16.53% (39) |
| 7 | 236 | 24.15% (57) | 4.24% (10) | 67.37% (159) | 0.42% (1) | 2.12% (5) | 1.69% (4) |
| 8 | 177 | 1.13% (2) | 3.95% (7) | 0.56% (1) | 71.75% (127) | 1.69% (3) | 20.90% (37) |
| 9 | 236 | 1.69% (4) | 8.05% (19) | 5.51% (13) | 3.81% (9) | 78.81% (186) | 2.12% (5) |
| 11 | 177 | 1.13% (2) | 12.43% (22) | 0.56% (1) | 22.03% (39) | 1.13% (2) | 62.71% (111) |
| Total correctly classified 68.49% | |||||||
| Source of Variation | SS (/107) | Df | MS (/106) | F | p-Value |
|---|---|---|---|---|---|
| Temperature | 6.06042 | 3 | 20.2014 | 24.40 | <0.0000 |
| pH | 22.9289 | 4 | 57.3222 | 69.23 | <0.0000 |
| Frequency | 41.9108 | 20 | 20.9554 | 25.31 | <0.0000 |
| Error | 25.3368 | 306 | 0.827999 | ||
| Total | 102.38 | 333 |
| Temperature (°C) | Cases | Mean Vpp Value |
|---|---|---|
| 10 | 83 | 326.848 a |
| 25 | 105 | 847.02 b |
| 40 | 41 | 1287.07 c |
| 20 | 105 | 1439.08 c |
| pH | Cases | Mean Vpp Value |
|---|---|---|
| 8 | 63 | 9.33551 a |
| 5 | 63 | 266.996 ab |
| 9 | 42 | 585.956 b |
| 4 | 83 | 1968.77 c |
| 7 | 83 | 2043.96 c |
| Source of Variation | SS (/107) | Df | MS (/105) | F | p-Value |
|---|---|---|---|---|---|
| Temperature | 1.35745 | 3 | 45.2485 | 42.47 | <0.0000 |
| pH | 33.4439 | 4 | 836.098 | 784.68 | <0.0000 |
| Frequency | 6.34787 | 20 | 31.7393 | 29.79 | <0.0000 |
| Error | 3.26051 | 306 | 1.06552 | ||
| Total | 48.6782 | 333 |
| Temperature (°C) | Cases | Mean Vpp Value |
|---|---|---|
| 10 | 83 | 3224.96 a |
| 20 | 105 | 3576.92 b |
| 25 | 105 | 3587.66 b |
| 40 | 41 | 3923.76 c |
| pH | Cases | Mean Vpp Value |
|---|---|---|
| 8 | 63 | 2514.51 a |
| 5 | 63 | 2674.03 b |
| 4 | 83 | 3095.34 c |
| 7 | 83 | 3751.87 d |
| 9 | 42 | 5855.87 e |
| pH | Cases | Correctly Classified | |||
|---|---|---|---|---|---|
| All | Vpp, Delay, and Temperature | Vpp, Delay, and Frequency | Vpp and Delay | ||
| 4 | 83 | 98.7952 | 96.3855 | 96.3855 | 95.1807 |
| 5 | 63 | 66.6667 | 69.8413 | 58.7302 | 66.6667 |
| 7 | 83 | 98.7952 | 95.1807 | 89.1566 | 87.9518 |
| 8 | 63 | 60.3175 | 65.0794 | 93.6508 | 96.8254 |
| 9 | 42 | 100.0 | 100.0 | 100.0 | 100.0 |
| Total | 334 | 85.63 | 85.63 | 87.42 | 88.92 |
| Operation Principle | Possibility to WSN | pH Range (N° of Tested pHs) | Temperature Range (N° of Temperatures) | Classification | Accuracy | Year | Ref. |
|---|---|---|---|---|---|---|---|
| Polymer + Flourescense | No | 2–11 (17) | - | Two regression models | R2 = 0.99 | 2018 | [49] |
| Polymer + Flourescense | No | 3.8–8.7 (5) | 9.85–69.85 | Regression model | R2 = 0.99 | 2019 | [50] |
| Polymer + Flourescense | No | 4–12 (9) | - | Regression model | R2 = 0.99 | 2022 | [51] |
| Polymer + Flourescense | No | 9–13 (5) | - | Regression model | R = 0.98 | 2019 | [52] |
| Polymer + Flourescense | No | 0.04–8.69 (16) | - | Regression model | R2 = 0.99 | 2020 | [53] |
| Polymer + Refractive index | Apparently yes | 1–12 (5) | 20–40 (5) | Linear regression | - | 2018 | [54] |
| Electrode + Potentiometric | Yes | 6–9 (4) | - | Regression model | R2 = 0.98 | 2019 | [55] |
| Polymer + Potentiometric | Yes | 6.09–8.92 (4) | - | - | - | 2022 | [56] |
| Electrode + Potentiometric | Yes | 4.3–9 (5) | 25–45 (3) | Regression model | R2 = 0.99 | 2019 | [57] |
| Electrode + Potentiometric | Yes | 2–12 (6) | - | Regression model | - | 2020 | [58] |
| ISFET | Yes | 2–10 (9) | 23–53 (4) | Regresion model | R2 = 0.99 | 2021 | [59] |
| Electromagnetic field | Yes | 4–9 (5) | 10–40 (4) | PNN | R2 = 0.69 | 2023 | This work |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Viciano-Tudela, S.; Parra, L.; Sendra, S.; Lloret, J. A Low-Cost Virtual Sensor for Underwater pH Monitoring in Coastal Waters. Chemosensors 2023, 11, 215. https://doi.org/10.3390/chemosensors11040215
Viciano-Tudela S, Parra L, Sendra S, Lloret J. A Low-Cost Virtual Sensor for Underwater pH Monitoring in Coastal Waters. Chemosensors. 2023; 11(4):215. https://doi.org/10.3390/chemosensors11040215
Chicago/Turabian StyleViciano-Tudela, Sandra, Lorena Parra, Sandra Sendra, and Jaime Lloret. 2023. "A Low-Cost Virtual Sensor for Underwater pH Monitoring in Coastal Waters" Chemosensors 11, no. 4: 215. https://doi.org/10.3390/chemosensors11040215
APA StyleViciano-Tudela, S., Parra, L., Sendra, S., & Lloret, J. (2023). A Low-Cost Virtual Sensor for Underwater pH Monitoring in Coastal Waters. Chemosensors, 11(4), 215. https://doi.org/10.3390/chemosensors11040215