Statistical Deadband: A Novel Approach for Event-Based Data Reporting


Abstract
:1. Introduction
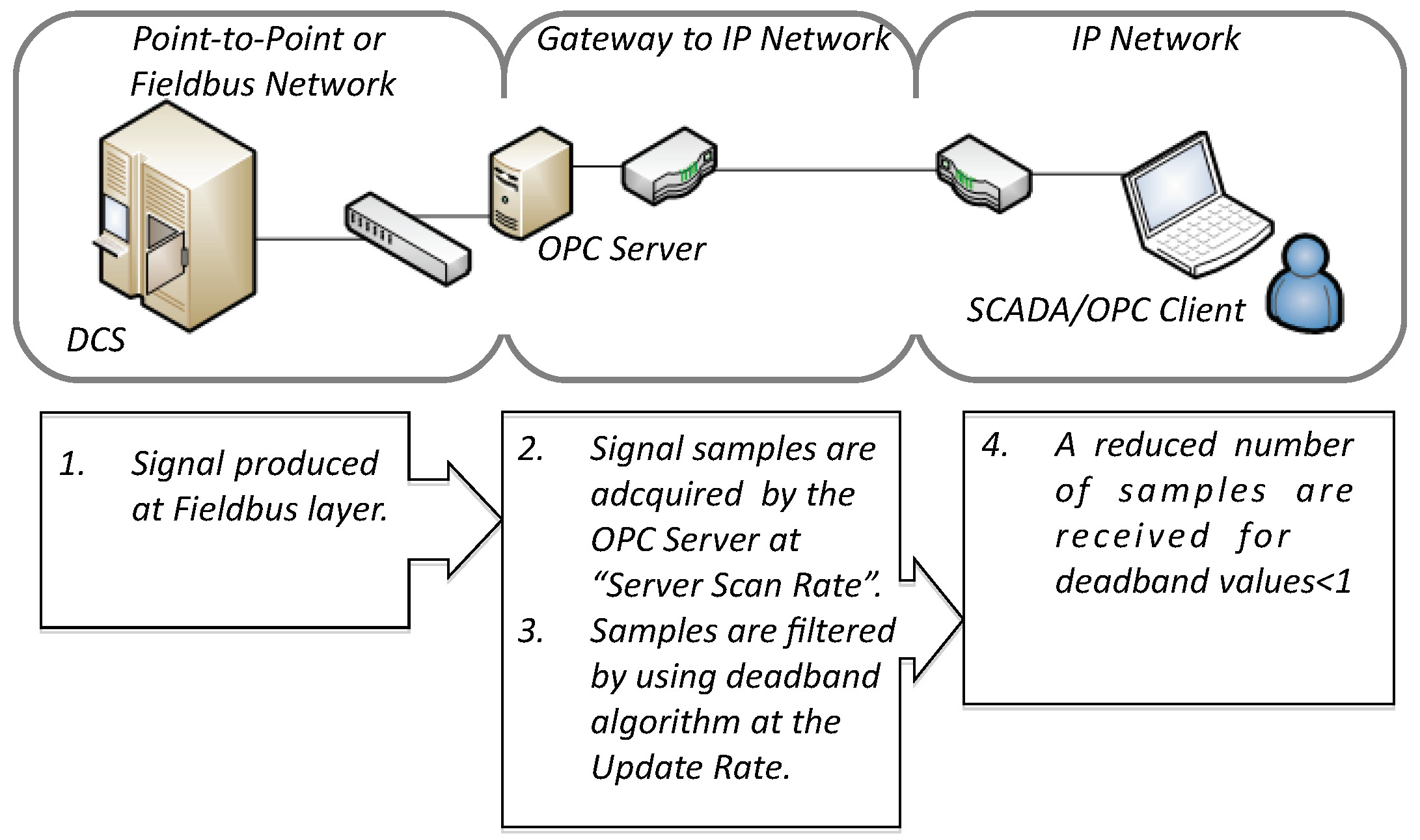
2. OPC Deadband and Event-Based Reporting Strategy
The Absolute Deadband Algorithm
| Algorithm 1 Absolute Deadband (AD) | |
| procedure Absolute Deadband (, , , , d) | |
| if then | |
| send | ▹ Signal will be sent |
| ▹ Update the last recorded signal | |
| else | |
| discard | |
| end if | |
| end procedure |
3. The Bollinger Financial Technical Analysis
4. Bollinger Deadband and Volatility Deadband Algorithms
4.1. Bollinger Deadband: An Algorithm Using the Upper and Lower Bands
| Algorithm 2 Bollinger Deadband (BD) | |
| procedure Bollinger Deadband (, , n, k, d, ) | |
| if then | ▹ No filter for the first n periods |
| ▹ Add to the top | |
| send | ▹ Current value will be sent |
| else | |
| if then | |
| ▹ Remove from the bottom | |
| ▹ Add to the top | |
| send | ▹ Current value will be sent |
| ▹ Update the cache | |
| else | |
| ▹ Remove from the bottom | |
| ▹ Add to the top | |
| discard | |
| end if | |
| end if | |
| end procedure |
4.2. Volatility Deadband: An Algorithm Using the Volatility Indicator
- The VD algorithm does not use the last cached sample, , in the computation of the next sample; and
- The VD algorithm does not build a interval, but the BD algorithm does.
| Algorithm 3 Volatility Deadband (VD) | |
| procedure Volatility Deadband (, , n, k, d) | |
| if then | ▹ No filter for the first n periods |
| ▹ Add to the top | |
| send | ▹ Current value will be sent |
| else | |
| if then | |
| ▹ Remove from the bottom | |
| ▹ Add to the top | |
| send | ▹ Current value will be sent |
| else | |
| ▹ Remove from the bottom | |
| ▹ Add to the top | |
| discard | |
| end if | |
| end if | |
| end procedure |
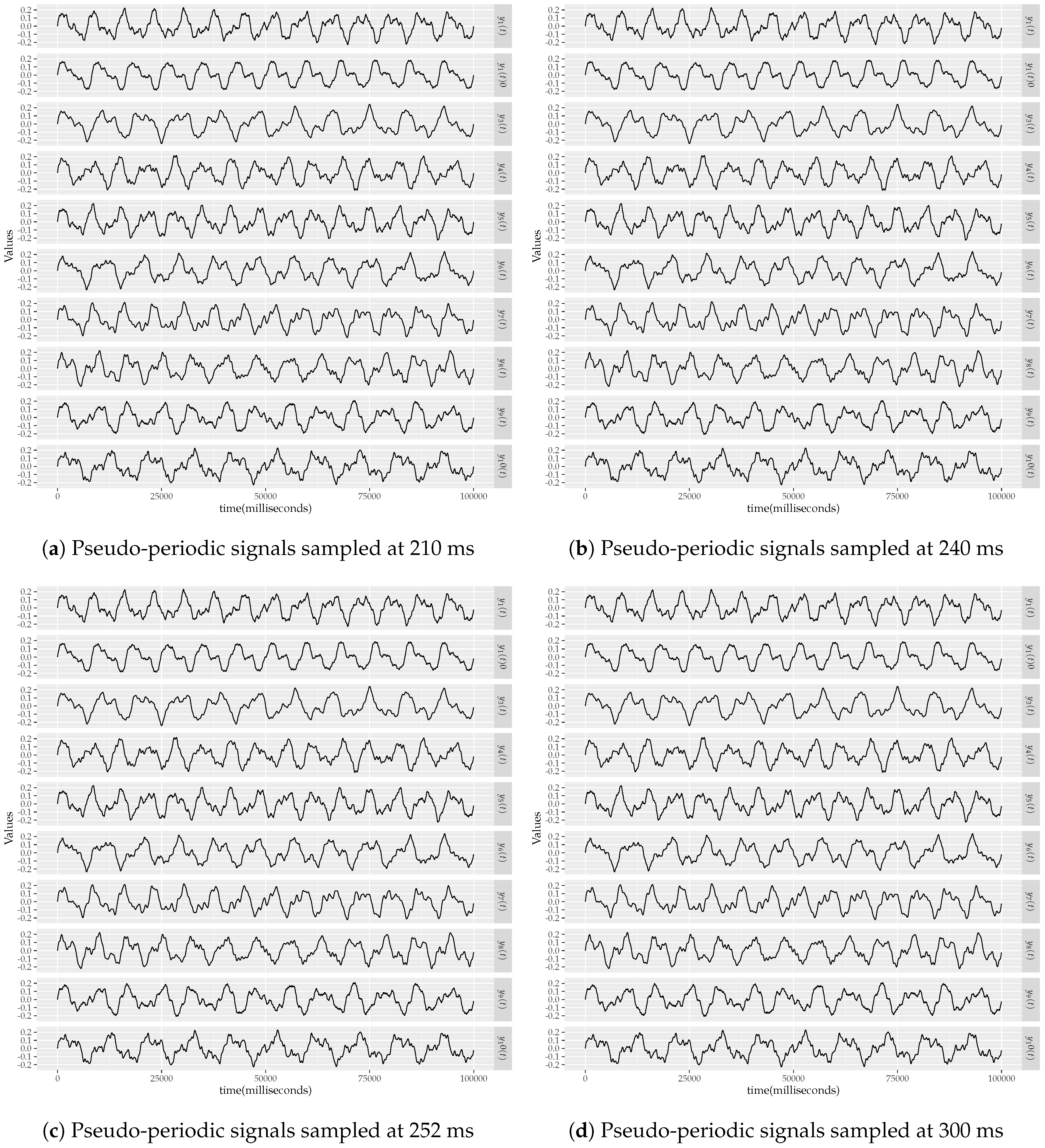
5. Simulation Results
- , and
- ,
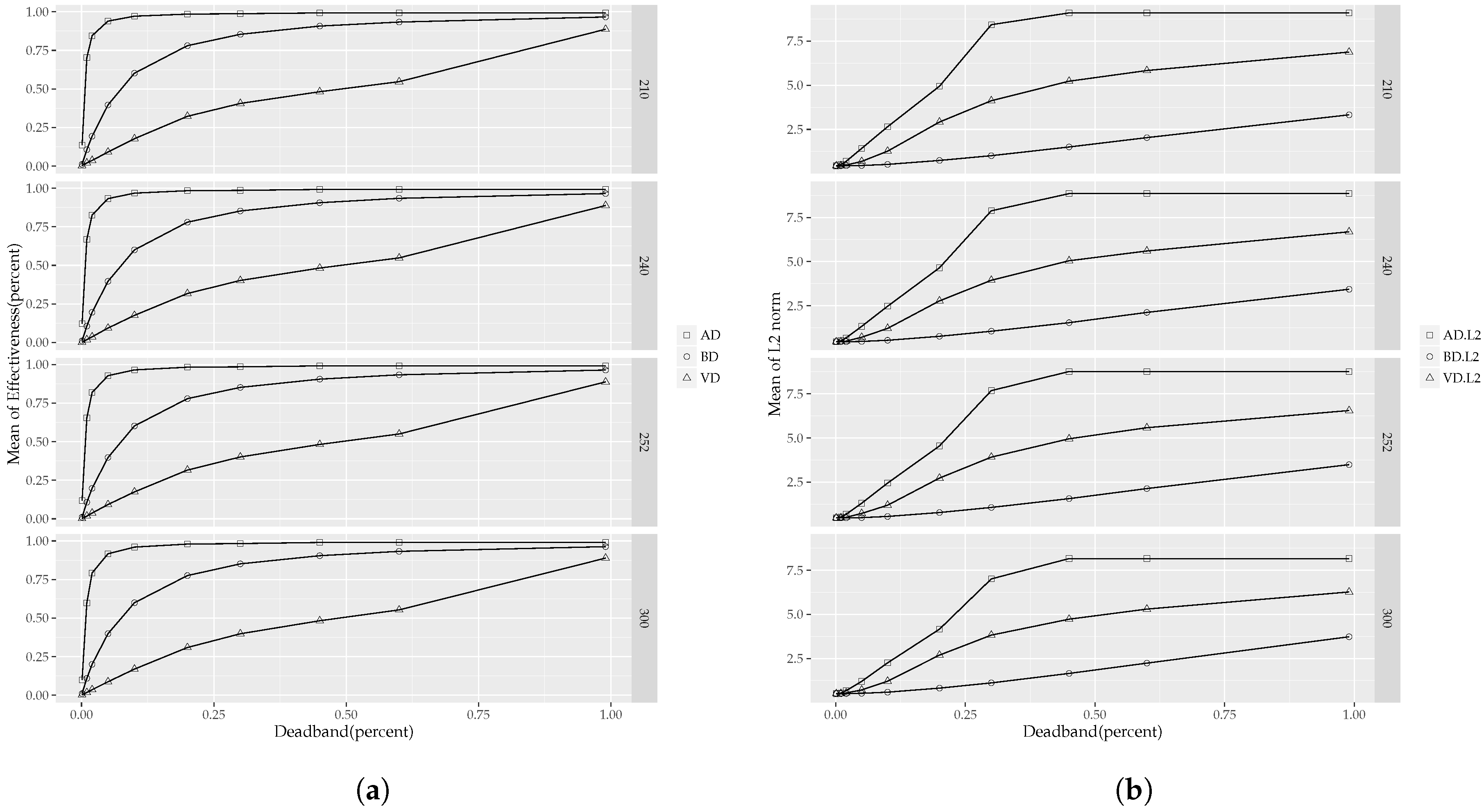
5.1. Effectiveness and Fidelity
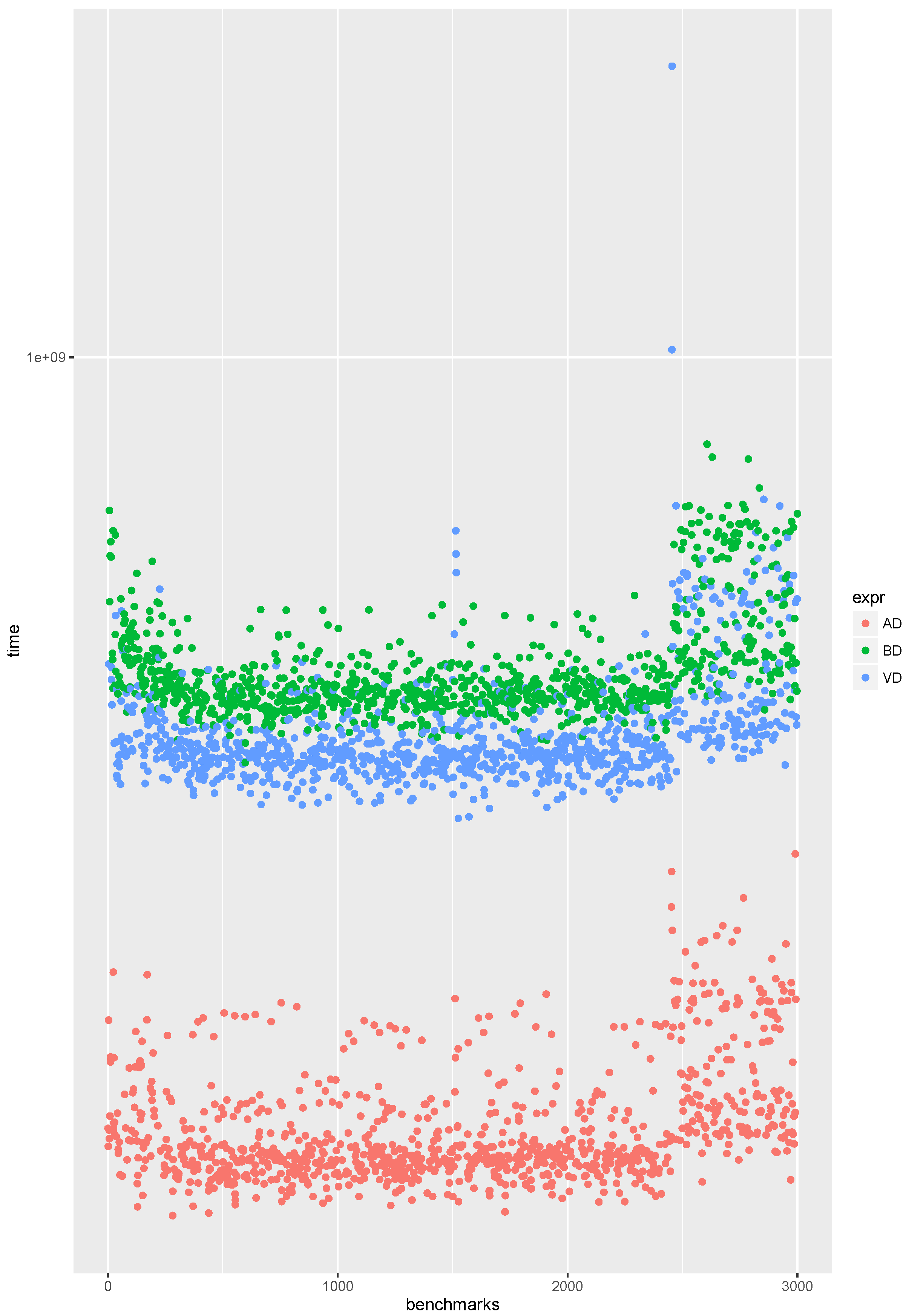
5.2. CPU Usage Benchmarks
6. Conclusions
Funding
Conflicts of Interest
References
- Friedman, M.F. Statistical Analysis of Deadband-deviation Rules in Quality Control. Comput. Oper. Res. 1995, 22, 419–433. [Google Scholar] [CrossRef]
- Ellis, P. Extension of phase plane analysis to quantized systems. IRE Trans. Autom. Control 1959, 4, 43–54. [Google Scholar] [CrossRef]
- Liu, Q.; Wang, Z.; He, X.; Zhou, D. A survey of event-based strategies on control and estimation. Syst. Sci. Control Eng. 2014, 2, 90–97. [Google Scholar] [CrossRef]
- Sijs, J.; Lazar, M. On event based state estimation. In International Workshop on Hybrid Systems: Computation and Control; Springer: Berlin/Heidelberg, Germany, 2009; pp. 336–350. [Google Scholar]
- Damm, M.; Leitner, S.H.; Mahnke, W. OPC Unified Architecture; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Bitter, R.; Mohiuddin, T.; Nawrocki, M. LabView: Advanced Programming Techniques, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Loy, D.; Dietrich, D.; Schweinzer, H.J. Open Control Networks: LonWorks/EIA 709 Technology; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Miskowicz, M. Event-Based Control and Signal Processing; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Plonnigs, J.; Neugebauer, M.; Kabitzsch, K. A traffic model for networked devices in the building automation. In Proceedings of the 2004 IEEE International Workshop on Factory Communication Systems, Vienna, Austria, 22–24 September 2004. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2016. [Google Scholar]
- Torrisi, N. Deadband: Statistical Deadband Algorithms Comparison. 2016. Available online: https://CRAN.R-project.org/package=deadband (accessed on 5 December 2018).
- Diaz-Cacho, M.; Delgado, E.; Barreiro, A.; Falcón, P. Basic send-on-delta sampling for signal tracking-error reduction. Sensors 2017, 17, 312. [Google Scholar] [CrossRef] [PubMed]
- Díaz-Cacho, M.; Delgado, E.; Prieto, J.A.; López, J. Network adaptive deadband: Ncs data flow control for shared networks. Sensors 2012, 12, 16591–16613. [Google Scholar] [CrossRef] [PubMed]
- Hirche, S.; Hinterseer, P.; Steinbach, E.; Buss, M. Network traffic reduction in haptic telepresence systems by deadband control. In Proceedings of the 2005 IFAC World Congress, Prague, Czech Republic, 3–8 July 2005. [Google Scholar]
- Suh, Y.S. Send-on-delta sensor data transmission with a linear predictor. Sensors 2007, 7, 537–547. [Google Scholar] [CrossRef]
- Vasyutynskyy, V.; Kabitzsch, K. Deadband Sampling in PID Control. In Proceedings of the 2007 5th IEEE International Conference on Industrial Informatics, Vienna, Austria, 23–27 June 2007. [Google Scholar]
- Torrisi, N.M. Monitoring Services for Industrial. IEEE Ind. Electron. Mag. 2011, 5, 49–60. [Google Scholar] [CrossRef]
- Seilonen, I.; Tuovinen, T.; Elovaara, J.; Tuomi, I.; Oksanen, T. Aggregating OPC UA servers for monitoring manufacturing systems and mobile work machines. In Proceedings of the 2016 IEEE 21st International Conference on Emerging Technologies and Factory Automation (ETFA), Berlin, Germany, 6–9 September 2016; pp. 1–4. [Google Scholar]
- Garcia, E.; Antsaklis, P.J. Model-based event-triggered control with time-varying network delays. In Proceedings of the 2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 1650–1655. [Google Scholar]
- Miskowicz, M. Send-on-delta Concept: An Event-based Data Reporting Strategy. Sensors 2006, 6, 49–63. [Google Scholar] [CrossRef]
- Lehmann, D.; Lunze, J. Extension and experimental evaluation of an event-based state-feedback approach. Control Eng. Pract. 2011, 19, 101–112. [Google Scholar] [CrossRef]
- Yook, J.K.; Tilbury, D.M.; Soparkar, N.R. Trading computation for bandwidth: Reducing communication in distributed control systems using state estimators. IEEE Trans. Control Syst. Technol. 2002, 10, 503–518. [Google Scholar] [CrossRef]
- Otanez, P.; Moyne, J.R.; Tilbury, D. Using Deadbands to Reduce Communication in Networked Control Systems. In Proceedings of the 2002 American Control Conference, Anchorage, AK, USA, 8–10 May 2002; pp. 3015–3020. [Google Scholar]
- Pantoni, R.P.; Torrisi, N.; Brandao, D. An Open and Non-proprietary Device Description for Fieldbus Devices for Public IP Networks. In Proceedings of the 2007 5th IEEE International Conference on Industrial Informatics, Vienna, Austria, 23–27 June 2007; pp. 189–194. [Google Scholar]
- Simon, R.; Diedrich, C.; Riedl, M.; Thron, M. Field Device Integration. In Proceedings of the ETFA 2001—8th International Conference on Emerging Technologies and Factory Automation, Antibes-Juan les Pins, France, 15–18 Octorber 2001; pp. 150–155. [Google Scholar]
- Nguyen, V.H.; Suh, Y.S. Improving estimation performance in networked control systems applying the send-on-delta transmission method. Sensors 2007, 7, 2128–2138. [Google Scholar] [CrossRef] [PubMed]
- Åström, K.J.; Bernhardsson, B. Comparison of Riemann and Lebesque sampling for first order stochastic systems. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002; pp. 2011–2016. [Google Scholar]
- Li, S.; Sauter, D.; Xu, B. Fault isolation filter for networked control system with event-triggered sampling scheme. Sensors 2011, 11, 557–572. [Google Scholar] [CrossRef] [PubMed]
- Bollinger, J. Bollinger on Bollinger Bands; McGraw-Hill Education: New York, NY, USA, 2001. [Google Scholar]
- Ngan, H.Y.; Pang, G.K. Novel Method for Patterned Fabric Inspection Using Bollinger Bands. Opt. Eng. 2006, 45, 87202. [Google Scholar]
- Chande, T.S. Adapting Moving Averages to Market Volatility. Stock Commodities 1992, 10, 3. [Google Scholar]
- Butler, M.; Kazakov, D. A learning adaptive Bollinger band system. In Proceedings of the 2012 IEEE Conference on Computational Intelligence for Financial Engineering Economics (CIFEr), New York, NY, USA, 29–30 March 2012; pp. 1–8. [Google Scholar]
- Leeds, M. Bollinger Bands Thirty Years Later. arXiv, 2012; arXiv:1212.4890. [Google Scholar]
- Ulrich, J. TTR: Technical Trading Rules. 2016. Available online: https://CRAN.R-project.org/package=TTR (accessed on 5 December 2018).
- Intel. Berkeley Research lab, Sensors Data. 2004. Available online: http://db.csail.mit.edu/labdata/labdata.html (accessed on 5 December 2018).
- Park, S.; Lee, D.; Chu, W.W. Fast Retrieval of Similar Subsequences in Long Sequence Databases. In Proceedings of the 1999 Workshop on Knowledge and Data Engineering Exchange (KDEX’99), Chicago, IL, USA, 7 November 1999; pp. 60–67. [Google Scholar]
- Santos, R.A.; Normey-Rico, J.E.; Gómez, A.M.; Arconada, L.F.A.; de Prada Moraga, C. OPC based distributed real time simulation of complex continuous processes. Simul. Model. Pract. Theory 2005, 13, 525–549. [Google Scholar] [CrossRef]
- Yuvaraj, D.; Ranjith, S.M.; Kumar, J.N.; Krishnan, R.H. Design and Simulation of Thermal Power Plant Using PLC and SCADA. Program. Device Circuits Syst. 2016, 8, 228–232. [Google Scholar]
- Miskowicz, M. Analytical approximation of the uniform magnitude-driven sampling effectiveness. In Proceedings of the 2004 IEEE International Symposium on Industrial Electronics, Ajaccio, France, 4–7 May 2004; pp. 407–410. [Google Scholar]
- Miskowicz, M. Efficiency of Event-Based Sampling according to Error Energy Criterion. Sensors 2010, 10, 2242–2261. [Google Scholar] [CrossRef] [PubMed]
- Staszek, K.; Koryciak, S.; Miskowicz, M. Performance of Send-on-delta Sampling Schemes with Prediction. In Proceedings of the 2011 IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011. [Google Scholar]
- Mersmann, O. Microbenchmark: Accurate Timing Functions. 2015. Available online: https://CRAN.R-project.org/package=microbenchmark (accessed on 5 December 2018).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Periods (n) | Multiplier (k) |
|---|---|
| 10 | 1.9 |
| 20 | 2.0 |
| 50 | 2.1 |
| Effectiveness | Fidelity | |||||
|---|---|---|---|---|---|---|
| d | AD | BD | VD | AD | BD | VD |
| 0.01 | 66% | 11% | 2% | 5% | 5% | 5% |
| 0.05 | 92% | 40% | 9% | 13% | 5% | 7% |
| 0.1 | 96% | 60% | 17% | 25% | 6% | 12% |
| 0.2 | 97% | 77% | 31% | 46% | 8% | 28% |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Torrisi, N.M. Statistical Deadband: A Novel Approach for Event-Based Data Reporting. Informatics 2019, 6, 5. https://doi.org/10.3390/informatics6010005
Torrisi NM. Statistical Deadband: A Novel Approach for Event-Based Data Reporting. Informatics. 2019; 6(1):5. https://doi.org/10.3390/informatics6010005
Chicago/Turabian StyleTorrisi, Nunzio Marco. 2019. "Statistical Deadband: A Novel Approach for Event-Based Data Reporting" Informatics 6, no. 1: 5. https://doi.org/10.3390/informatics6010005
APA StyleTorrisi, N. M. (2019). Statistical Deadband: A Novel Approach for Event-Based Data Reporting. Informatics, 6(1), 5. https://doi.org/10.3390/informatics6010005