1. Introduction
Subdivision schemes have become very important tools to generate smooth curves and surfaces from initial data points. There are two main categories of subdivision schemes: interpolating subdivision schemes and approximating subdivision schemes. In interpolating subdivision schemes, the initial or existing data points are kept intact and additional data points are inserted in-between at each level of subdivision. On the other hand, in approximating subdivision schemes existing points are replaced by their approximations and new points are inserted between them at each level of refinement. This makes approximating schemes smoother than interpolating subdivision schemes. However, the limiting curve for approximating schemes does not pass through the given initial data points, especially at and near larger jumps or discontinuities. Curves generated by interpolating subdivision schemes pass through the given initial data points but produce oscillations also known as the Gibbs phenomenon near the points with large jumps or discontinuities. These jumps are not desirable for some applications.
Nonlinear subdivision schemes like ENO, WENO, PPH and PCHIP [
1,
2,
3,
4,
5,
6,
7,
8,
9], were introduced during last several years to address Gibbs phenomenon. The arithmetic mean of second differences was replaced by their harmonic mean in a linear subdivision scheme to change it to a nonlinear scheme in [
1,
2]. The geometric mean of first differences was used instead of the arithmetic mean of first differences in [
4]. In this article, we propose a family of 5-point nonlinear ternary interpolating subdivision schemes by replacing the arithmetic mean of third differences with the modified geometric mean of third difference and prove that this family of subdivision schemes is
continuous.
We have arranged this article in the following fashion. In
Section 2, preliminary concepts and their properties along with some basic terminology are discussed, in
Section 3, nonlinear interpolating subdivision schemes are introduced. Convergence analysis of these schemes is provided in
Section 4 and some numerical results are presented in
Section 5.
2. Preliminaries
A general form of
-points linear univariate ternary interpolating subdivision scheme
S which maps set of data points
into the next refinement level of data points
is defined as
The above equation can also be expressed as
. A necessary condition for the uniform convergence of the ternary interpolating subdivision scheme (
1) given by [
10] is
For
, we define a nonlinear function called the Modified Geometric Mean or MGM as
where
if
and
if
. Nonlinear function MGM defined above has several interesting properties like,
where
.
We recall
function
defined by [
1,
2] as
function defined above also satisfy the properties in (
4)–(
7).
3. 5-Point Nonlinear Ternary Interpolating Subdivision Schemes
In this section, we construct a class of 5-point nonlinear interpolating subdivision schemes. We start with a well known linear 5-point ternary interpolating subdivision scheme .
This linear subdivision scheme
S is
for
as proved by Zheng et al [
11]. We define
. The above scheme can be rewritten as
Replacing the arithmetic mean
in Equation (
10) by the modified geometric mean
as defined in (
3), we get a class of nonlinear 5-point ternary interpolating schemes
.
Similarly, if we replace the arithmetic mean
in Equation (
10) by modified harmonic mean also known as the
function,
as defined in (
8), we get another class of nonlinear 5-point ternary interpolating schemes.
4. Convergence Analysis of Nonlinear Subdivision Schemes
Nonlinear schemes (
11) can be expressed as
By simplifying,
In general,
where
represents a nonlinear subdivision scheme,
S is the linear interpolating subdivision scheme (
9), which is
continuous for
, and
is given by
Proposition 1. The subdivision scheme S defined in (9) satisfies the following inequalities. - 1.
for ,
- 2.
for ,
- 3.
for .
Proof. Consider
By using the definition of subdivision scheme
S given in (
9), we get,
which simplifies to
For
, above equation gives,
which proves the first inequality of Proposition 1. For the second inequality, consider,
Using the subdivision scheme
S in (
9) and simplifying, we get,
Similarly, for the third inequality, consider,
Again, using the definition of the subdivision scheme
S in (
9) and simplifying, we get,
For
, we get,
☐
Proposition 2. Function F defined in (16) satisfies the following inequalities. - 1.
, for ,
- 2.
, for ,
- 3.
, for .
Proof. For
, Equation (
24) gives
Proofs of other two inequalities in Proposition 2 are very similar and straight forward. ☐
To prove the convergence of nonlinear scheme
, we recall the following result from [
1,
2,
3].
Theorem 1. For F, S and δ given in (15) if such that and ∃ such that then the subdivision scheme is uniformally convergent. Moreover, if S is convergent then, for all sequence , is at least with .
Since ternary subdivision has three different formulas at points
,
, &
, in order to prove conditions (
26) and (
27) of Theorem 1 for our nonlinear schemes, we have to consider each of them separately.
Case 1: At the point
:
By Proposition 1 (part 1) and Proposition 2 (part 1), for
, we get,
Case 2: At the point
:
By Proposition 1 (part 2) and Proposition 2 (part 2), for
, we get,
Case 3: At the point
:
By Proposition 1 (part 3) and Proposition 2 (part 3), for
, we get,
Let
then for
, we get
. Therefore, from (
28)–(
30), we have,
for
with
. Which proves Equation (
27).
Now to prove Equation (
26), we consider
at
as defined in (
16), and by using the fact (
7), we have,
At
,
and similarly, at
, by using Property (
7),
Let
then
, for
. Therefore, from Equations (
32)–(
34), we get,
which proves Equation (
26) and consequently proves that our class of 5-point nonlinear ternary interpolating subdivision schemes
given in (
11) is uniformly convergent for
.
It is noted that
c as given in (
31) can be restricted as
for
. Which gives
as defined in Theorem 1 and hence proves that
is
for
.
Since functions
and
are nonlinear and satisfy properties given in (
4)–(
7) which we used for
to prove the convergence of (
11). Therefore, it can easily be verified by replacing
function with
function in the above proof that subdivision schemes (
12) are also
continuous.
5. Numerical Results
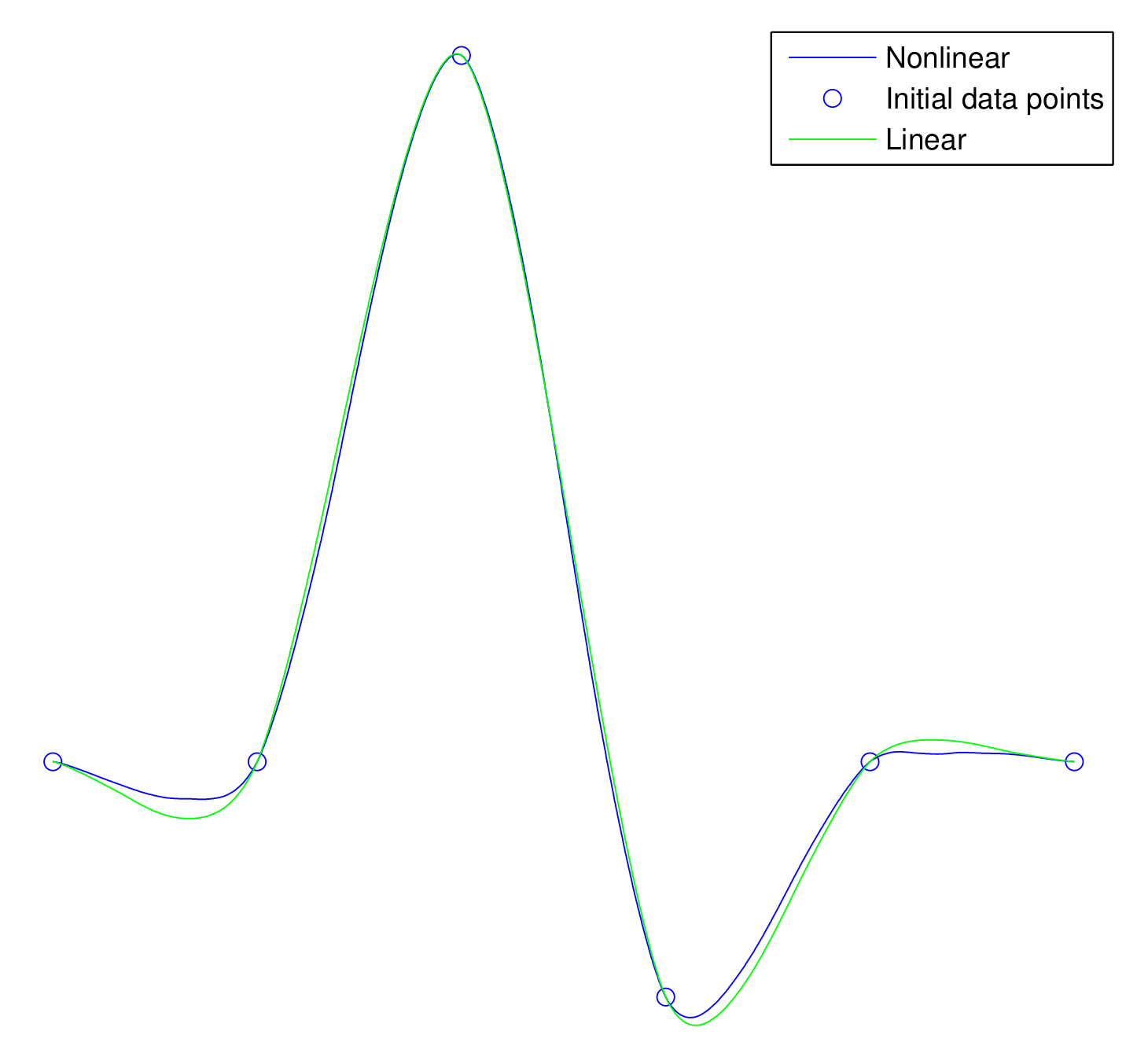
We picked three examples with a varying number of irregularities in initial data points. In
Figure 1, two smooth curves are generated from the initial control or data points, one with linear scheme (
9) and another with a nonlinear scheme (
11) both with
. One can easily see oscillations or Gibbs phenomenon for linear scheme but for the nonlinear scheme it is reduced.
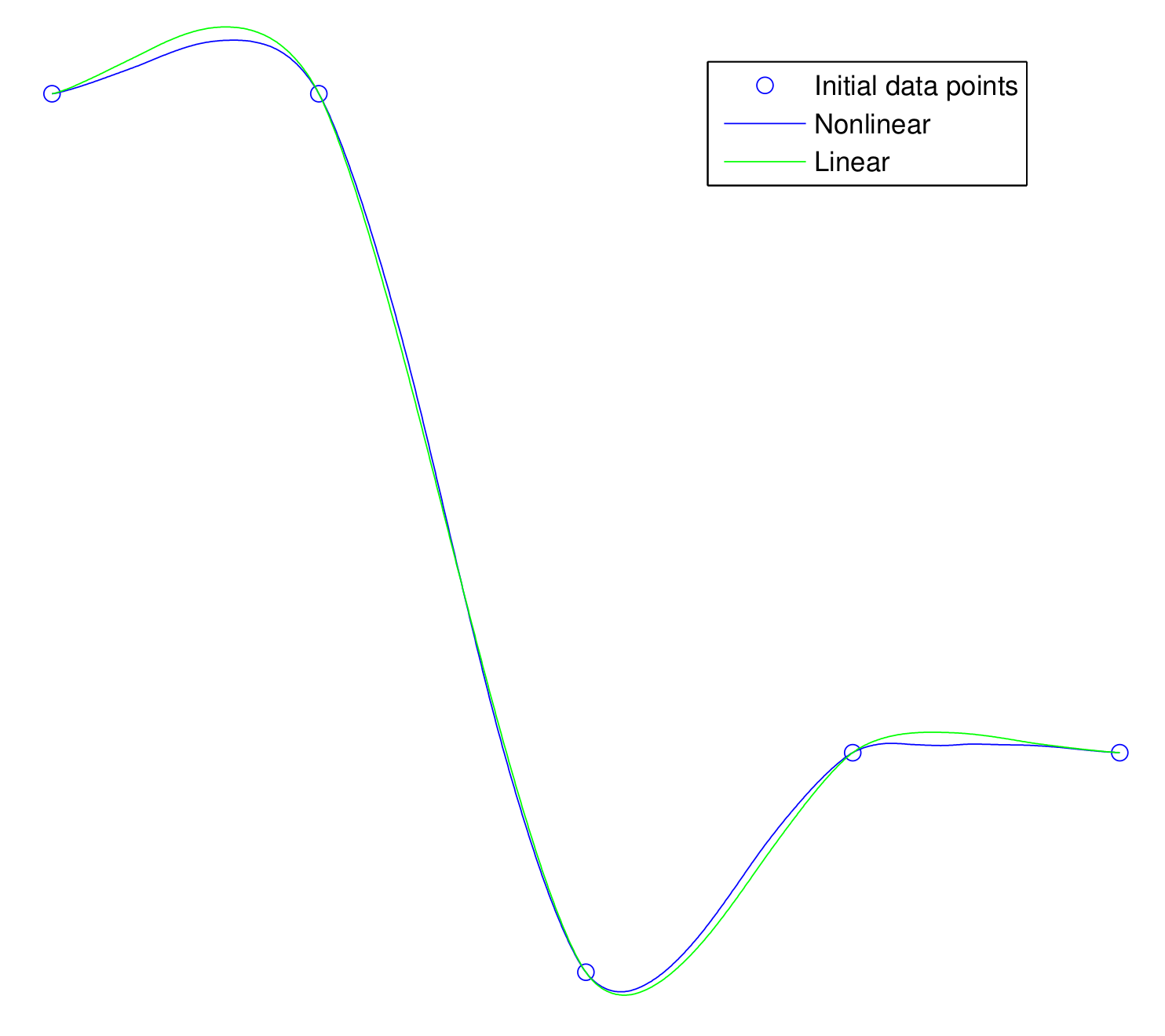
Figure 2, shows different initial data points and the corresponding smooth curves: one with the linear scheme (
9) and one with nonlinear scheme (
11) with
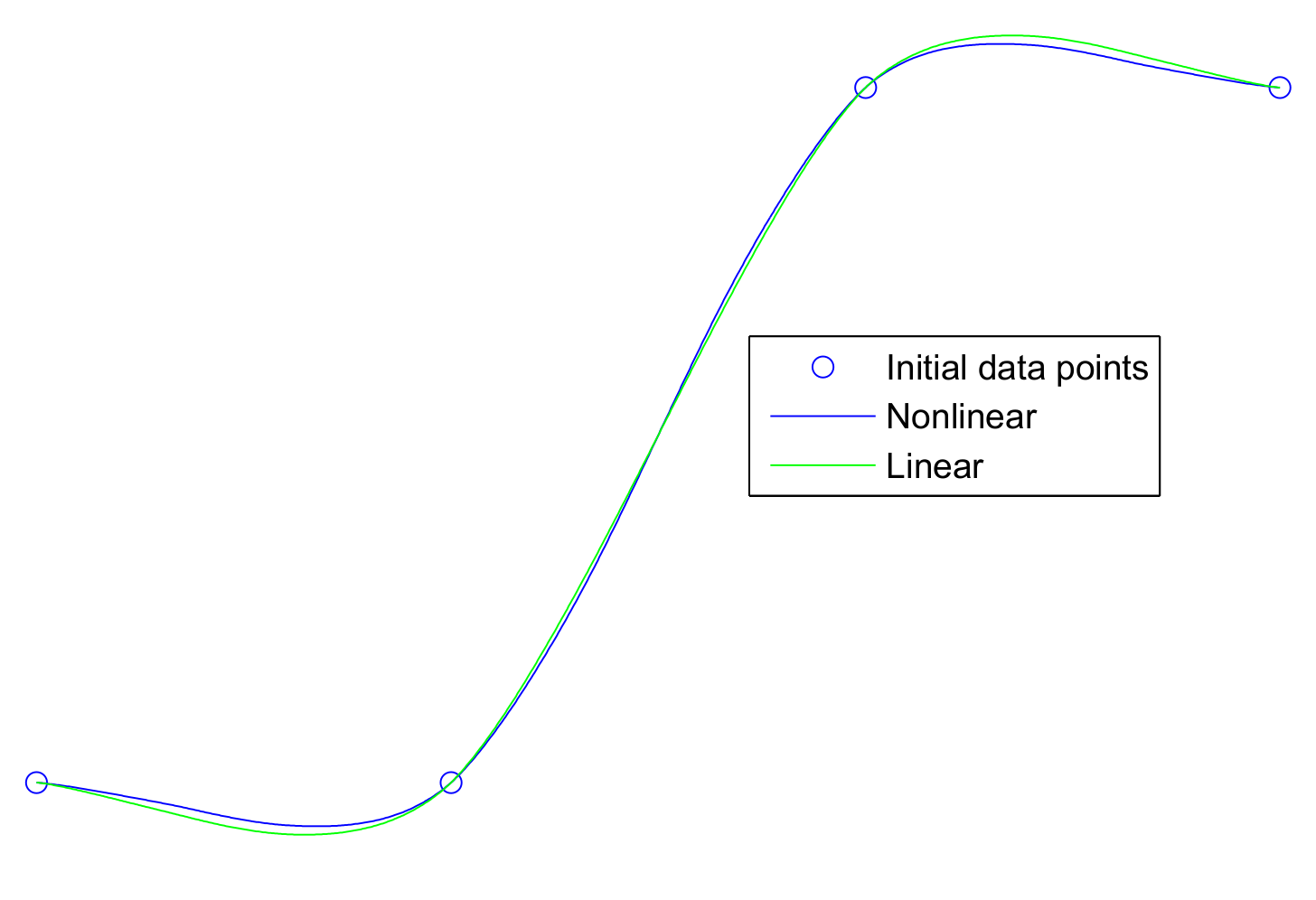
. In
Figure 3, initial data points are selected from the step function and the corresponding smooth curves are generated with the linear scheme (
9) and nonlinear scheme (
11) with
. Improvement is evident. Curves generated from nonlinear schemes reduce the Gibbs phenomenon.
6. Conclusions
In this article, we proposed a class of 5-point nonlinear interpolating subdivision schemes. It is proved that our schemes are at least continuous. Numerical results are presented to show that curves generated by these schemes reduce the Gibbs phenomenon while keeping the same level of smoothness.





{kind=link}
{kind=link}
{kind=link}