Modeling and Simulation of a Hydraulic Network for Leak Diagnosis


 ,
,  , and
, and
Abstract
:1. Introduction
2. Modeling of the Hydraulic Network
2.1. Hydraulic Concepts
2.2. Energy Losses and Mass Balance in Hydraulic Networks
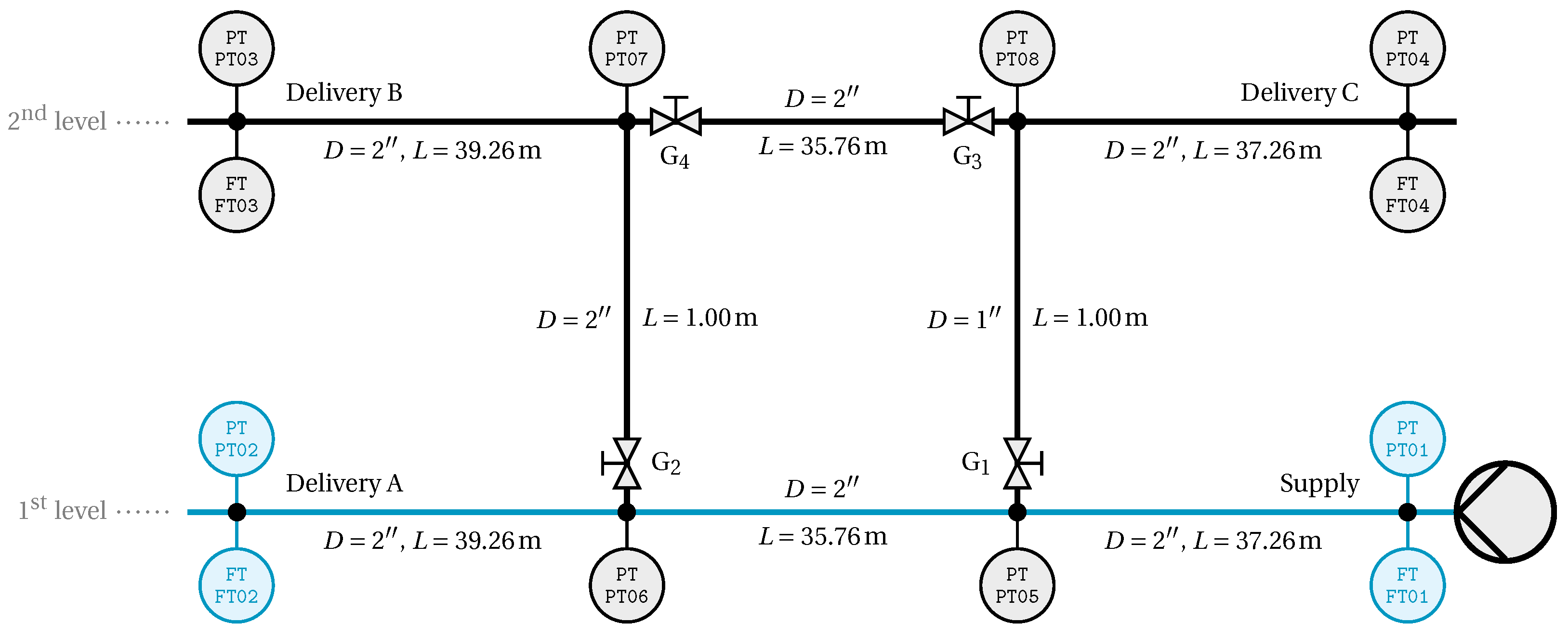
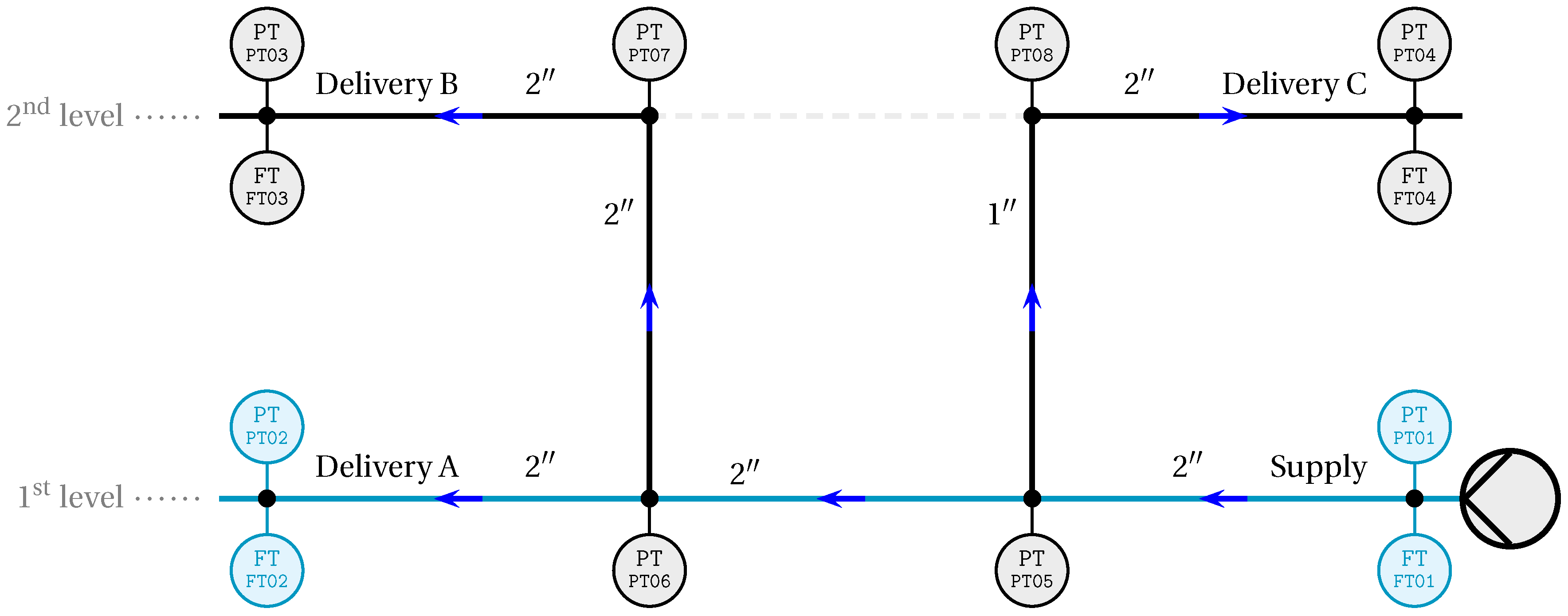
2.3. Configurations of the Proposed Hydraulic Network
2.4. Modeling of the Proposed Hydraulic Network
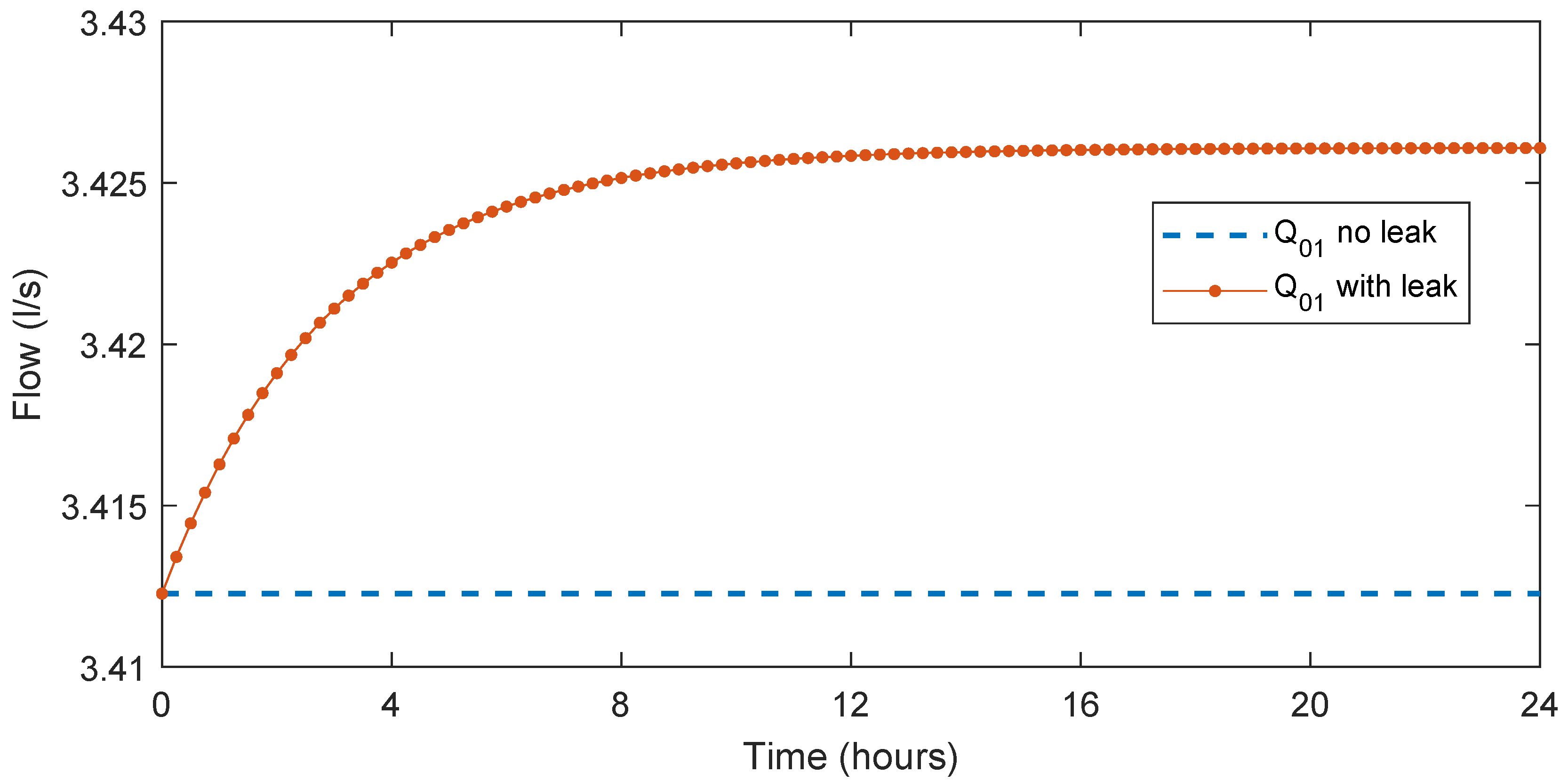
3. Numerical Experiments
params = value_list;sols = [];for param = params sol = simulateNetwork(param); sols = [sols,sol];end
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Solis Luna, N.B. Determinación Remota de Fugas de Gas y Petróleo Por Medio de Cámaras Infrarrojas. Ph.D. Thesis, Instituto Politécnico Nacional, Mexico City, Mexico, 2009. [Google Scholar]
- Fuentes-Mariles, O.; Palma-Nava, A.; Rodríguez-Vázquez, K. Estimación y localización de fugas en una red de tuberías de agua potable usando algoritmos genéticos. Ing. Investig. Techol. 2011, 12, 235–242. [Google Scholar]
- Doney, K. Leak Detection in Pipelines Using the Extended Kalman Filter and the Extended Boundary Approach. Ph.D. Thesis, University of Saskatchewan, Saskatoon, SK, Canada, 2007. [Google Scholar]
- OECD. Water Governance in Cities. In OECD Studies on Water; OECD: Paris, France, 2016. [Google Scholar]
- Van Pham, T.; Georges, D.; Besancon, G. Predictive control with guaranteed stability for water hammer equations. IEEE Trans. Autom. Control 2014, 59, 465–470. [Google Scholar] [CrossRef]
- Torres, L.; Verde, C.; Carrera, R.; Cayetano, R. Algoritmos de diagnóstico para fallas en ductos. Techol. Cienc. Agua 2014, 5, 57–78. [Google Scholar]
- Wang, Y.; Blesa, J.; Puig, V. Robust Periodic Economic Predictive Control based on Interval Arithmetic for Water Distribution Networks. IFAC-PapersOnLine 2017, 50, 5202–5207. [Google Scholar] [CrossRef] [Green Version]
- Verde, C. Multi-leak detection and isolation in fluid pipelines. Control Eng. Pract. 2001, 9, 673–682. [Google Scholar] [CrossRef]
- Torres, L.; Besancon, G.; Georges, D. A collocation model for water-hammer dynamics with application to leak detection. In Proceedings of the 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 3890–3894. [Google Scholar]
- Navarro, A.; Begovich, O.; Besançon, G.; Dulhoste, J. Real-time leak isolation based on state estimation in a plastic pipeline. In Proceedings of the IEEE International Conference on Control Applications (CCA), Denver, CO, USA, 28–30 September 2011; pp. 953–957. [Google Scholar]
- Delgado-Aguiñaga, J.; Besançon, G.; Begovich, O.; Carvajal, J. Multi-leak diagnosis in pipelines based on Extended Kalman Filter. Control Eng. Pract. 2016, 49, 139–148. [Google Scholar] [CrossRef]
- Ocampo-Martinez, C.; Barcelli, D.; Puig, V.; Bemporad, A. Hierarchical and decentralised model predictive control of drinking water networks: Application to barcelona case study. IET Control Theory Appl. 2012, 6, 62–71. [Google Scholar] [CrossRef]
- Scola, I.R.; Besançon, G.; Georges, D. Optimizing Kalman optimal observer for state affine systems by input selection. Automatica 2018, 93, 224–230. [Google Scholar]
- Soldevila, A.; Fernandez-Canti, R.M.; Blesa, J.; Tornil-Sin, S.; Puig, V. Leak localization in water distribution networks using Bayesian classifiers. J. Process Control 2017, 55, 1–9. [Google Scholar] [CrossRef]
- Wood, D.J.; Rayes, A.G. Reliability of algorithms for pipe network analysis. J. Hydraul. Div. 1981, 107, 1145–1161. [Google Scholar]
- Wylie, E.B.; Streeter, V.L. Hydraulic Transients; FEB Press: Ann Arbor, MI, USA, 1983. [Google Scholar]
- Crane. Flujo de Fluidos en Válvulas, Accesorios y Tuberías; McGraw-Hill: New York, NY, USA, 1989. [Google Scholar]
- Genić, S.; Aranđelović, I.; Kolendić, P.; Jarić, M.; Budimir, N.; Genić, V. A review of explicit approximations of Colebrook’s equation. FME Trans. 2011, 39, 67–71. [Google Scholar]
- Mott, R.L. Mecánica de Fluidos Aplicada; Pearson Educación: Turin, Italy, 1996. [Google Scholar]
- Bermúdez, J.R.; Santos-Ruiz, I.; López-Estrada, F.R.; Torres, L.; Puig, V. Diseño y modelado dinámico de una planta piloto para detección de fugas hidráulicas. In Proceedings of the Congreso Nacional de Control Automático CNCA 2017, Mexico City, Mexico, 4–6 October 2017; Asociación Mexicana de Control Automático: Mexico City, Mexico, 2017; Volume 1, pp. 2–7. [Google Scholar]
- Coleman, T.F.; Li, Y. An interior trust region approach for nonlinear minimization subject to bounds. SIAM J. Optim. 1996, 6, 418–445. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section | Length (m) | Diameter (mm) |
|---|---|---|
| 37.26 | 48.6 | |
| x(*) | 48.6 | |
| 48.6 | ||
| 39.26 | 48.6 | |
| 1.00 | 24.3 | |
| 1.00 | 48.6 | |
| 37.26 | 48.6 | |
| 35.76 | 48.6 | |
| 39.26 | 48.6 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bermúdez, J.-R.; López-Estrada, F.-R.; Besançon, G.; Valencia-Palomo, G.; Torres, L.; Hernández, H.-R. Modeling and Simulation of a Hydraulic Network for Leak Diagnosis. Math. Comput. Appl. 2018, 23, 70. https://doi.org/10.3390/mca23040070
Bermúdez J-R, López-Estrada F-R, Besançon G, Valencia-Palomo G, Torres L, Hernández H-R. Modeling and Simulation of a Hydraulic Network for Leak Diagnosis. Mathematical and Computational Applications. 2018; 23(4):70. https://doi.org/10.3390/mca23040070
Chicago/Turabian StyleBermúdez, José-Roberto, Francisco-Ronay López-Estrada, Gildas Besançon, Guillermo Valencia-Palomo, Lizeth Torres, and Héctor-Ricardo Hernández. 2018. "Modeling and Simulation of a Hydraulic Network for Leak Diagnosis" Mathematical and Computational Applications 23, no. 4: 70. https://doi.org/10.3390/mca23040070
APA StyleBermúdez, J.-R., López-Estrada, F.-R., Besançon, G., Valencia-Palomo, G., Torres, L., & Hernández, H.-R. (2018). Modeling and Simulation of a Hydraulic Network for Leak Diagnosis. Mathematical and Computational Applications, 23(4), 70. https://doi.org/10.3390/mca23040070