A Tutorial for the Analysis of the Piecewise-Smooth Dynamics of a Constrained Multibody Model of Vertical Hopping


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Background
1.2. Organization of the Paper
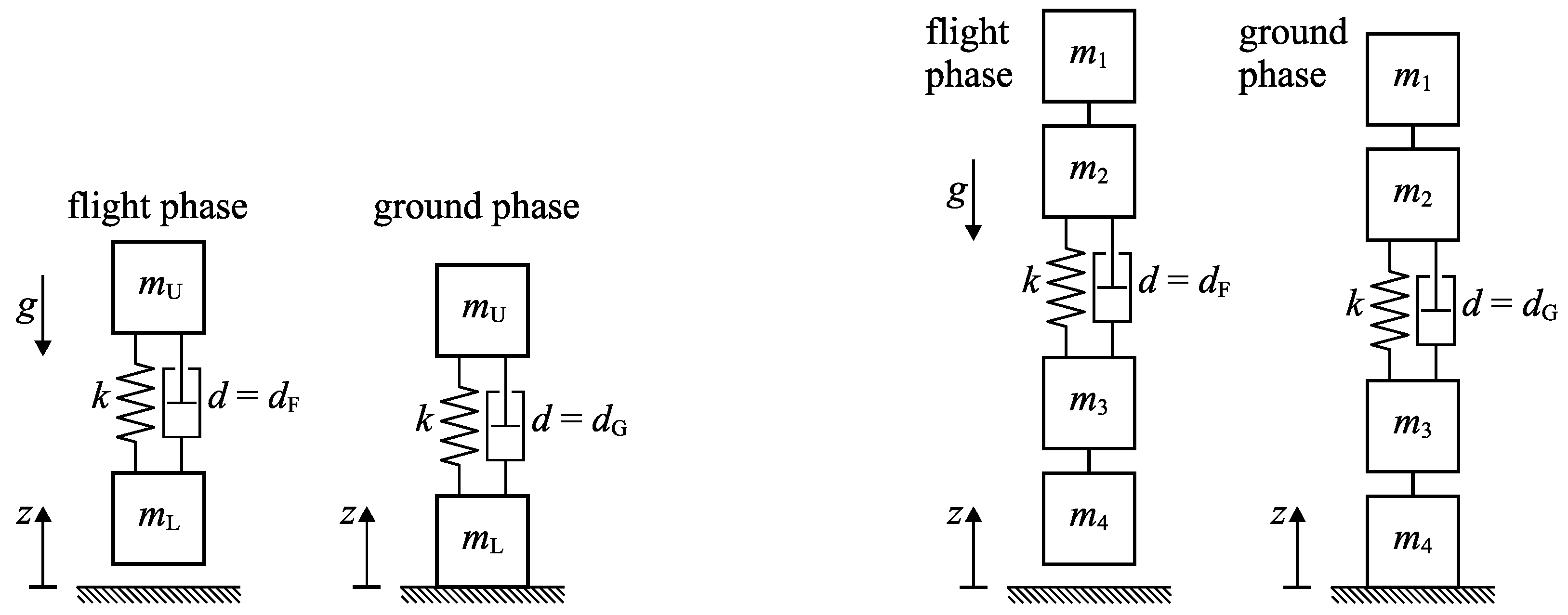
2. A Constrained Model of Vertical Hopping
2.1. Mechanical Model
2.2. Active Spring-Damper for Ensuring Periodic Motion
2.3. Switchings between the Flight and the Ground Phases
3. Dynamic Analysis
3.1. Assumptions and Limitations
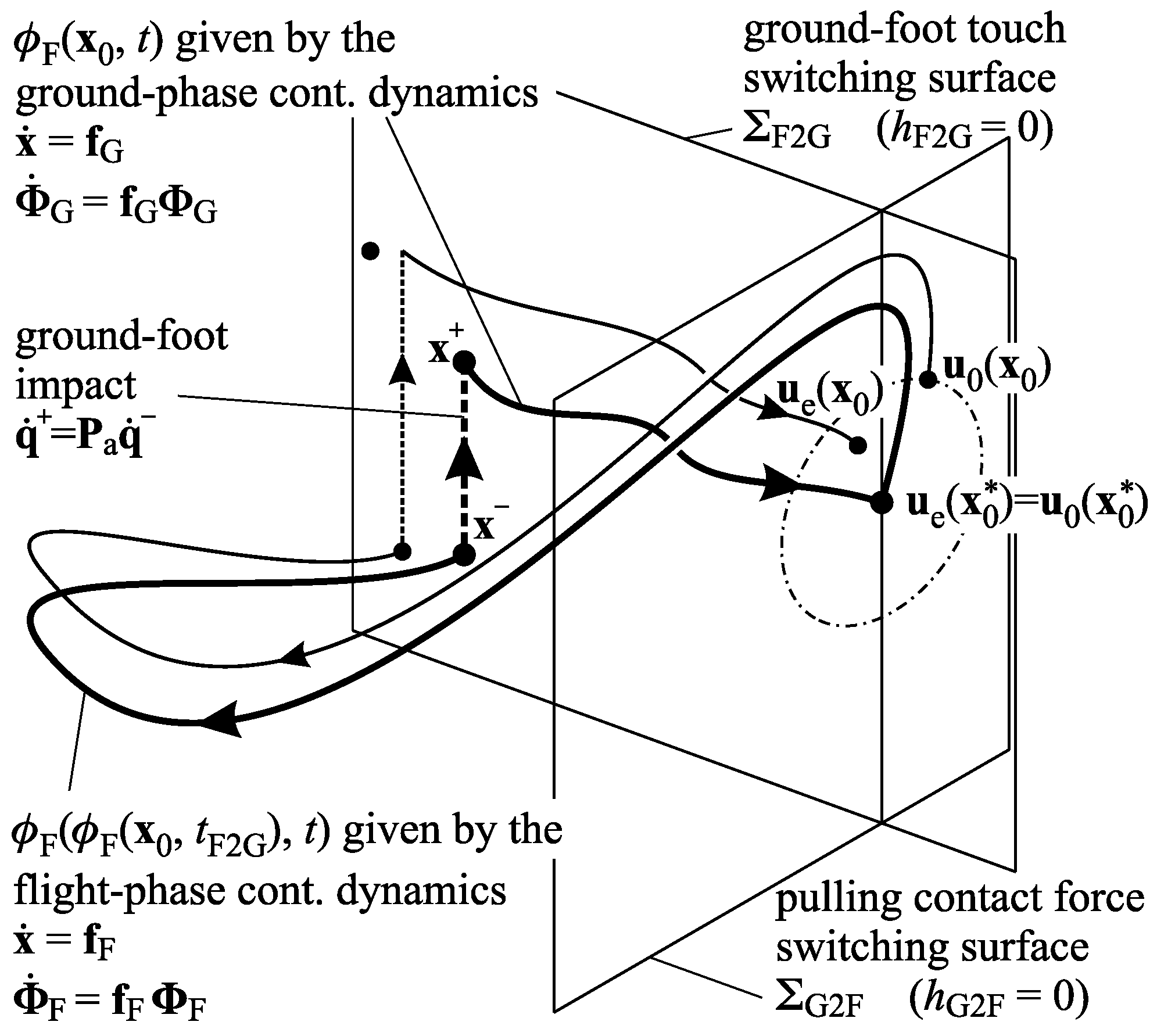
3.2. Continuous Dynamics in the Flight and in the Ground Phases
3.3. Piecewise-Smooth Periodic Orbits and Impacts in Hopping and Running
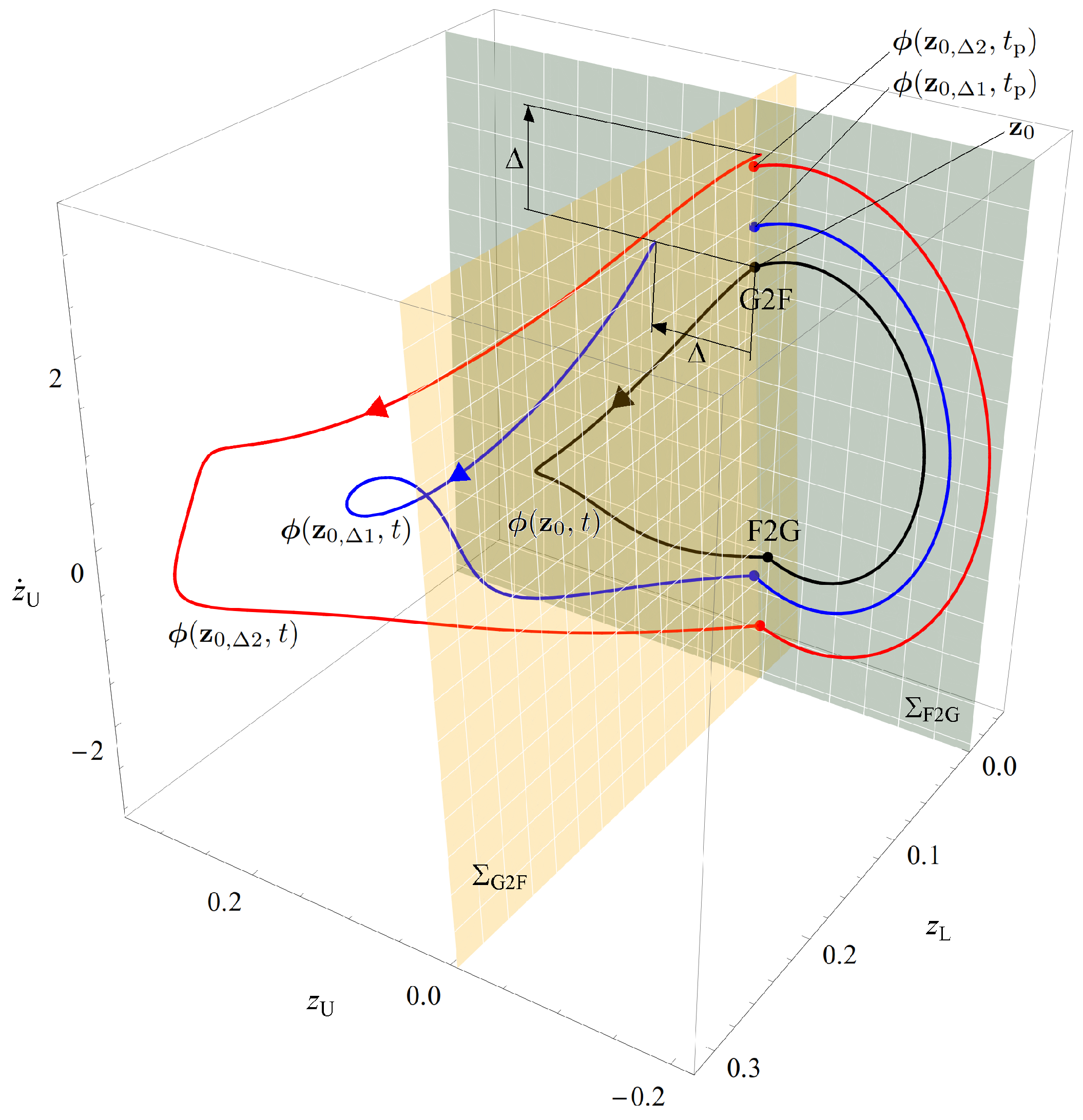
3.4. Numerical Identification of the Periodic Orbits
3.5. Stability Analysis
4. Results and Validation by Means of Semi-Analytic Calculations
4.1. Semi-Analytic Calculations
4.1.1. Closed form Solution in the Flight Phase
4.1.2. Closed form Solution in the Ground Phase
4.1.3. Periodic Solutions
4.1.4. Stability Analysis
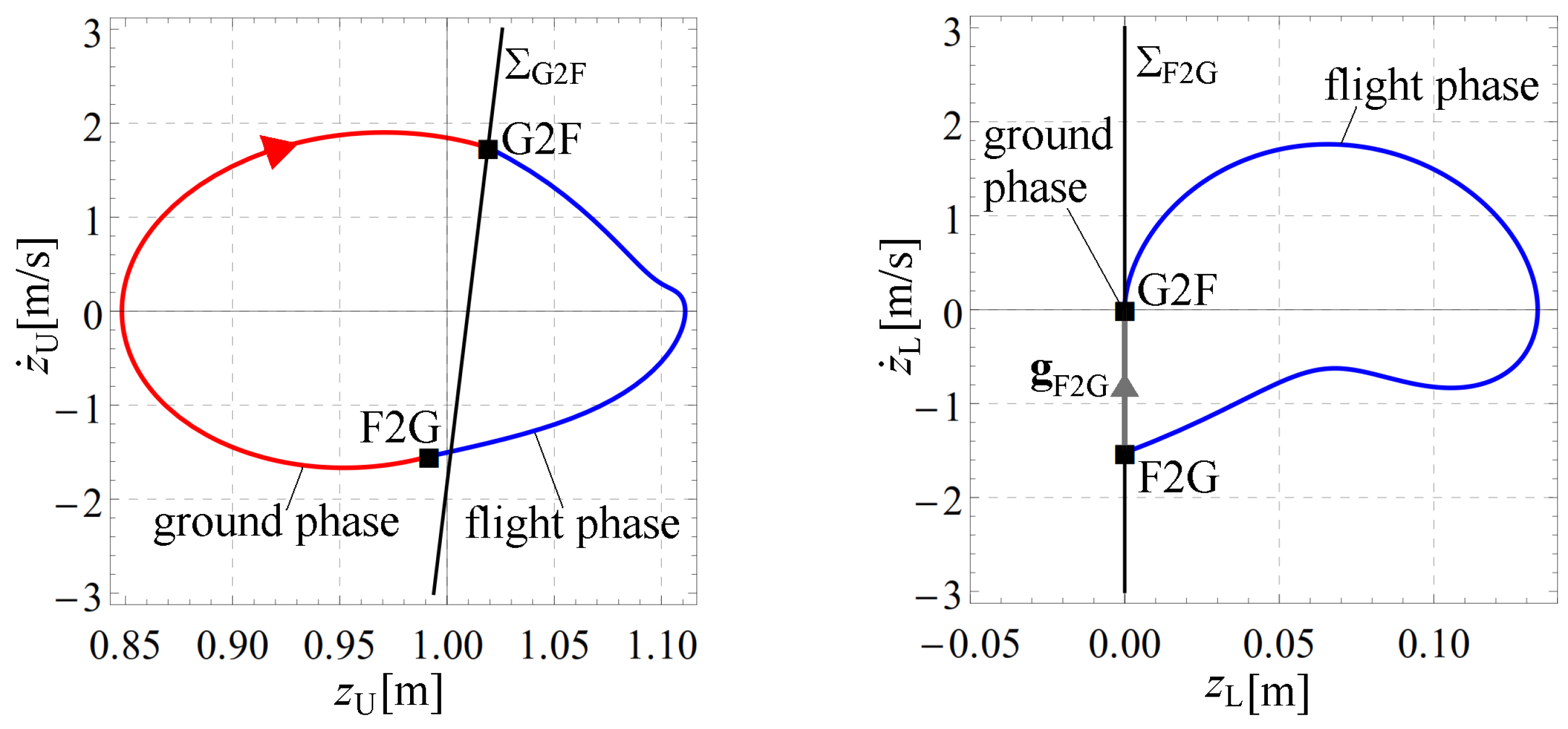
4.2. Illustration of Periodic Solutions
4.3. Overview of Effect of Parameters
5. Conclusions and Future Work
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Alciatore, D.; Abraham, L.; Barr, R. Matrix Solution of Digitized Planar Human Body Dynamics for Biomechanics Laboratory Instruction. Available online: http://www.engr.colostate.edu/~dga/dga/papers/bio_matrix.pdf (accessed on 13 November 2018).
- Jungers, W.L. Barefoot running strikes back. Nat. Biomech. 2010, 463, 433–434. [Google Scholar] [CrossRef] [PubMed]
- Mombaur, K.; Olivier, A.H.; Crétual, A. Forward and Inverse Optimal Control of Bipedal Running. In Modeling, Simulation and Optimization of Bipedal Walking; Mombaur, K., Berns, K., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 165–179. [Google Scholar]
- Souza, R.B. An Evidence-Based Videotaped Running Biomechanics Analysis. Phys. Med. Rehabil. Clin. N. Am. 2016, 27, 217–236. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ćesić, J.; Joukov, V.; Petrovic, I.; Kulić, D. Full Body Human Motion Estimation on Lie Groups Using 3D Marker Position Measurements. In Proceedings of the IEEE-RAS International Conference on Humanoid Robotics, Cancun, Mexico, 15–17 November 2016; p. 8. [Google Scholar]
- Vanezis, A.; Lees, A. A biomechanical analysis of good and poor performers of the vertical jump. Ergonomics 2005, 48, 1594–1603. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kamandulis, S.; Venckunas, T.; Snieckus, A.; Nickus, E.; Stanislovaitiene, J.; Skurvydas, A. Changes of vertical jump height in response to acute and repetitive fatiguing conditions. Sci. Sports 2016, 31, 163–171. [Google Scholar] [CrossRef]
- Lieberman, D.E.; Venkadesan, M.; Werbel, W.A.; Daoud, A.I.; D’Andrea, S.; Davis, I.S.; Mang’Eni, R.O.; Pitsiladis, Y. Foot strike patterns and collision forces in habitually barefoot versus shod runners. Nat. Biomech. 2010, 463, 531–535. [Google Scholar] [CrossRef] [PubMed]
- Zelei, A.; Bencsik, L.; Kovács, L.L.; Stépán, G. Energy efficient walking and running-impact dynamics based on varying geometric constraints. In Proceedings of the 12th Conference on Dynamical Systems Theory and Applications, Lodz, Poland, 2–5 December 2013; pp. 259–270. [Google Scholar]
- Seyfarth, A.; Günther, M.; Blickhan, R. Stable operation of an elastic three-segment leg. Biol. Cybern. 2001, 84, 365–382. [Google Scholar] [CrossRef] [PubMed]
- Holmes, P.; Full, R.J.; Koditschek, D.E.; Guckenheimer, J. The Dynamics of Legged Locomotion: Models, Analyses, and Challenges. SIAM Rev. 2006, 48, 207–304. [Google Scholar] [CrossRef] [Green Version]
- Rummel, J.; Seyfarth, A. Stable Running with Segmented Legs. Int. J. Robot. Res. 2008, 27, 919–934. [Google Scholar] [CrossRef]
- Clever, D.; Hu, Y.; Mombaur, K. Humanoid gait generation in complex environments based on template models and optimality principles learned from human beings. Int. J. Robot. Res. 2018. [Google Scholar] [CrossRef]
- DeHart, B.J.; Gorbet, R.; Kulić, D. Spherical Foot Placement Estimator for Humanoid Balance Control and Recovery. In Proceedings of the International Conference on Robotics and Automation, Brisbane, Australia, 21–25 May 2018; p. 8. [Google Scholar]
- Stépán, G. Delay effects in the human sensory system during balancing. Trans. R. Soc. A 2009, 367, 1195–1212. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Insperger, T.; Milton, J.; Stépán, G. Acceleration feedback improves balancing against reflex delay. J. R. Soc. Interface 2013, 10, 20120763. [Google Scholar] [CrossRef] [PubMed]
- Milton, J.; Insperger, T.; Cook, W.; Harris, D.M.; Stepan, G. Microchaos in human postural balance: Sensory dead zones and sampled time-delayed feedback. Phys. Rev. E 2018, 98. [Google Scholar] [CrossRef] [PubMed]
- Beer, R.D. Beyond control: The dynamics of brain-body-environment interaction in motor systems. Adv. Exp. Med. Biol. 2009, 629, 7–24. [Google Scholar] [CrossRef] [PubMed]
- Fekete, L.; Krauskopf, B.; Zelei, A. Three-segmented hopping leg for the analysis of human running locomotion. In Proceedings of the 9th European Nonlinear Dynamics Conference (ENOC 2017), Budapest, Hungary, 25–30 June 2017; pp. 1–2. [Google Scholar]
- Zelei, A.; Insperger, T. Reduction of ground-foot impact intensity of a hopping leg model on slopes. In Proceedings of the 5th Joint International Conference on Multibody System Dynamics–IMSD 2018, Lisboa, Portuga, 24–28 June 2018. [Google Scholar]
- Piiroinen, P.T.; Dankowicz, H.J. Low-Cost Control of Repetitive Gait in Passive Bipedal Walkers. Int. J. Bifurca. Chaos 2005, 15, 1959–1973. [Google Scholar] [CrossRef]
- Kövecses, J.; Kovács, L.L. Foot impact in different modes of running: Mechanisms and energy transfer. Procedia IUTAM 2011, 2, 101–108. [Google Scholar] [CrossRef]
- Novacheck, T.F. The biomechanics of running. Gait Posture 1998, 7, 77–95. [Google Scholar] [CrossRef]
- Zelei, A.; Insperger, T. Simplest mechanical model of stable hopping with inelastic ground-foot impact. In Proceedings of the 12th IFAC Symposium on Robot Control—SYROCO 2018, Budapest, Hungary, 27–30 August 2018; p. 6. [Google Scholar]
- De Jalón, J.; Bayo, E. Kinematic and Dynamic Simulation of Multibody Systems: The Real-Time Challenge; Springer: Berlin, Germany, 1994. [Google Scholar]
- Featherstone, R.; Orin, D. Robot dynamics: Equations and algorithms. In Proceedings of the ICRA 2000, IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; pp. 826–834. [Google Scholar] [CrossRef]
- De Jalón, J.G. Twenty-five years of natural coordinates. Multibody Syst. Dyn. 2007, 18, 15–33. [Google Scholar] [CrossRef]
- Johnson, A.M.; Koditschek, D.E. Legged Self-Manipulation. IEEE Access 2013, 1, 310–334. [Google Scholar] [CrossRef]
- Peters, S.; Hsu, J. Comparison of Rigid Body Dynamic Simulators for Robotic Simulation in Gazebo. 2014. Available online: https://www.osrfoundation.org/wordpress2/wp-content/uploads/2015/04/roscon2014_scpeters.pdf (accessed on 13 November 2018).
- Johnson, A.M.; Burden, S.A.; Koditschek, D.E. A hybrid systems model for simple manipulation and self-manipulation systems. Int. J. Robot. Res. 2016, 35, 1354–1392. [Google Scholar] [CrossRef] [Green Version]
- Leine, R.I. Bifurcations in Discontinuous Mechanical Systems of Fillipov Type. Ph.D. Thesis, Technische Universiteit Eindhoven, Eindhoven, The Netherlands, 2000. [Google Scholar]
- Dankowicz, H.J.; Piiroinen, P.T. Exploiting discontinuities for stabilization of recurrent motions. Dyn. Syst. 2002, 17, 317–342. [Google Scholar] [CrossRef]
- Burden, S.A.; Sastry, S.S.; Koditschek, D.E.; Revzen, S. Event-Selected Vector Field Discontinuities Yield Piecewise-Differentiable Flows. SIAM J. Appl. Dyn. Syst. 2016, 15, 1227–1267. [Google Scholar] [CrossRef]
- Kövecses, J.; Piedoboeuf, J.C.; Lange, C. Dynamic Modeling and Simulation of Constrained Robotic Systems. IEEE/ASME Trans. Mechatron. 2003, 2, 165–177. [Google Scholar] [CrossRef]
- Westervelt, E.R.; Grizzle, J.W.; Chevallereau, C.; Choi, J.H.; Morris, B. Feedback Control of Dynamic Bipedal Robot Locomotion; CRC Press: Boca Raton, FL, USA, 2007. [Google Scholar]
- Hiskens, I.A.; Pai, M.A. Trajectory sensitivity analysis of hybrid systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2000, 47, 204–220. [Google Scholar] [CrossRef] [Green Version]
- Zelei, A.; Krauskopf, B.; Insperger, T. Control optimization for a three-segmented hopping leg model of human locomotion. In Proceedings of the DSTA 2017—Vibration, Control and Stability of Dynamical Systems, Lodz, Poland, 11–14 December 2017; pp. 599–610. [Google Scholar]
- Koditschek, D.E.; Buehler, M. Analysis of a Simplified Hopping Robot. Int. J. Robot. Res. 1991, 10, 587–605. [Google Scholar] [CrossRef] [Green Version]
- Leine, R.I.; van Campen, D.H. Discontinuous bifurcations of periodic solutions. Math. Comput. Model. 2002, 36, 259–273. [Google Scholar] [CrossRef]
- Blajer, W.; Dziewiecki, K.; Mazur, Z. An improved inverse dynamics formulation for estimation of external and internal loads during human sagittal plane movements. Comput. Methods Biomech. Biomed. Eng. 2015, 18, 362–375. [Google Scholar] [CrossRef] [PubMed]
- Font-Llagunes, J.M.; Pamies-Vila, R.; Kövecses, J. Configuration-Dependent Performance Indicators for the Analysis of Foot Impact in Running Gait. Available online: http://www.cim.mcgill.ca/~font/downloads/ECCOMAS13.pdf (accessed on 13 November 2018).
- Yamakita, M.; Asano, F. Extended passive velocity field control with variable velocity fields for a kneed biped. Adv. Robot. 2001, 15, 139–168. [Google Scholar] [CrossRef]
- Kövecses, J.; Font-Llagunes, J.M. An Eigenvalue Problem for the Analysis of Variable Topology Mechanical Systems. ASME J. Comput. Nonlinear Dyn. 2009, 4, 9. [Google Scholar] [CrossRef]
- Chi, K.J.; Schmitt, D. Mechanical energy and effective foot mass during impact loading of walking and running. J. Biomech. 2005, 38, 1387–1395. [Google Scholar] [CrossRef] [PubMed]
- Dankowicz, H.; Schilder, F. Recipes for Continuation, Computational Science and Engineering; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2013. [Google Scholar]
- Guckenheimer, J.; Holmes, P. Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields; Springer: Berlin, Germany, 1983. [Google Scholar]
- Ewins, D. Modal Testing: Theory and Practice; John Wiley and Sons: Hoboken, NJ, USA, 1984. [Google Scholar]
- He, J.; Fu, Z.F. Modal Analysis; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]









© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zana, R.R.; Bodor, B.; Bencsik, L.; Zelei, A. A Tutorial for the Analysis of the Piecewise-Smooth Dynamics of a Constrained Multibody Model of Vertical Hopping. Math. Comput. Appl. 2018, 23, 74. https://doi.org/10.3390/mca23040074
Zana RR, Bodor B, Bencsik L, Zelei A. A Tutorial for the Analysis of the Piecewise-Smooth Dynamics of a Constrained Multibody Model of Vertical Hopping. Mathematical and Computational Applications. 2018; 23(4):74. https://doi.org/10.3390/mca23040074
Chicago/Turabian StyleZana, Roland Reginald, Bálint Bodor, László Bencsik, and Ambrus Zelei. 2018. "A Tutorial for the Analysis of the Piecewise-Smooth Dynamics of a Constrained Multibody Model of Vertical Hopping" Mathematical and Computational Applications 23, no. 4: 74. https://doi.org/10.3390/mca23040074
APA StyleZana, R. R., Bodor, B., Bencsik, L., & Zelei, A. (2018). A Tutorial for the Analysis of the Piecewise-Smooth Dynamics of a Constrained Multibody Model of Vertical Hopping. Mathematical and Computational Applications, 23(4), 74. https://doi.org/10.3390/mca23040074