2. The Solution of the Problem
We suppose that the interval between the concentric spheres is filled by a viscous continuum with a dynamical viscosity
, and
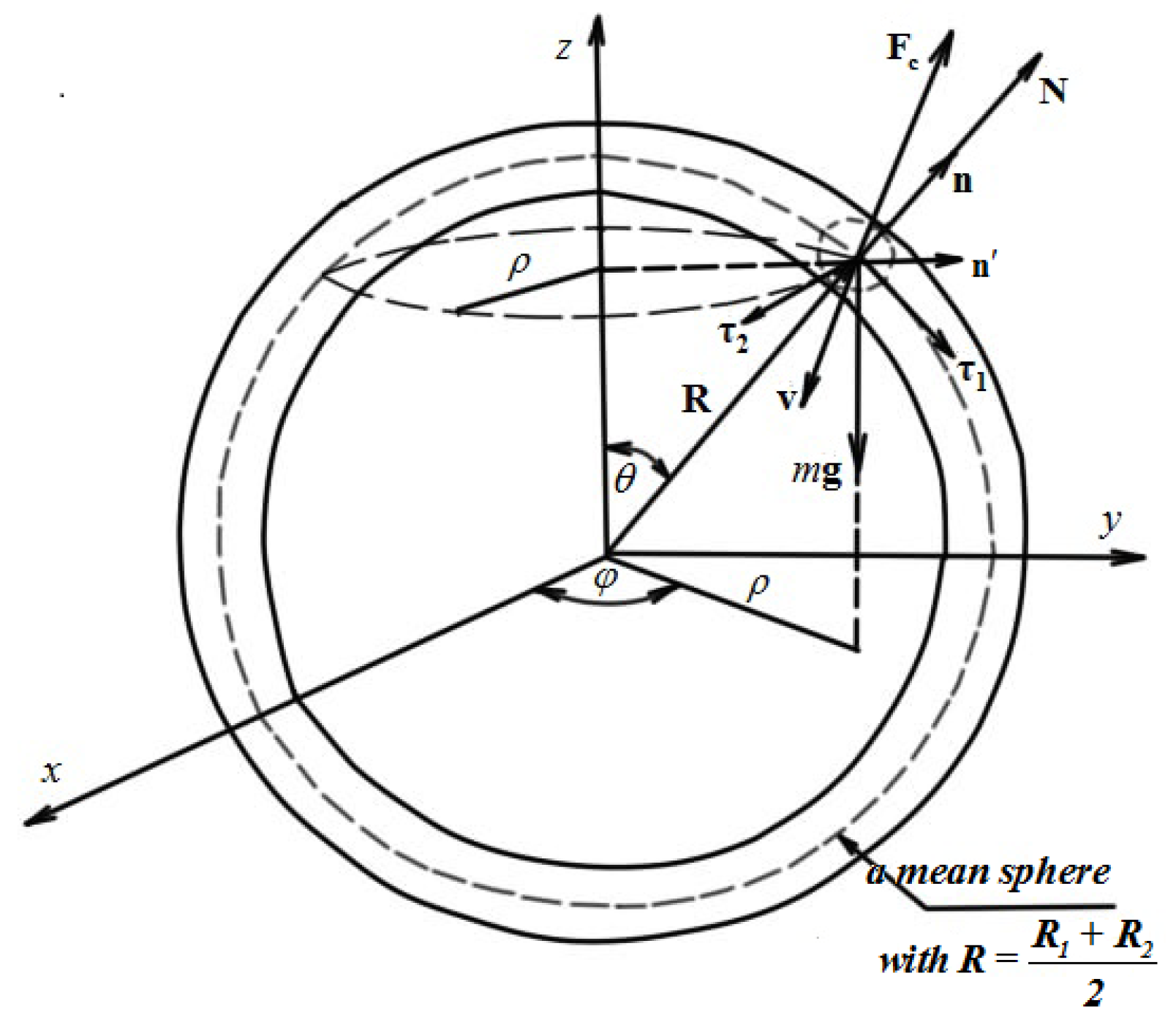
Figure 1 shows the geometry of the problem.
Since the ball has an arbitrary size, we cannot neglect its diameter in comparison with the radiuses of
and
. It means that we need to introduce the element of the metric on the surface due to the middle radius of the sphere
, i.e.,
Hence, the velocity of the ball can be represented in the next form
In the instantaneous unit basis at the surface of the middle sphere of
and
, for the velocity, we have
where the velocity components are
Differentiating Equation (3) in order to find the following equation for the complex acceleration of the ball gives:
where
,
;
—a normal unit vector, where
; and
is directed along the circle radius
and
lies in the plane of the unit vectors of
,
. In the result, we thus obtain the following for the complex acceleration:
It means that we can write the equation of the motion in a general form as
where
is the resulting reaction force between the outer and inner spheres. We use this in the next correlation
, where
is the reaction force of the inner sphere and
is the reaction force of the outer one. The normal unit vector
is directed from the outer sphere to the outside, in relation to the common center of the spheres, and in contrast to
, which is directed to the common center of the spheres.
is the total resistance force, where the viscous component proportional to the movement velocity is chosen with the proportionality coefficient
. This coefficient depends on the medium viscosity and diameter of the ball of mass
(see the Stokes formula in Ref. [
3]). Inserting Equations (3) and (5) into Equation (6) and using explicit expressions for
and
, we find that
where the explicit Equation (4) accounts for the velocity components. For getting the required system of the dynamical equations, we must resolve Equation (7) on the components’ orthogonal basis unit vectors
. In the result, we have
where
is the viscous attenuation. The dry one is proportional to the coefficient of friction
, because
and the system of Equation (8a) can be written in the following form:
where
is a frequency. If insert the below Equation (9) into the system of Equation (8b), we find the nonlinear equations in the form:
where
. It is clear that the system of Equation (9) must be solved when the corresponding initial conditions are formulated. We shall assume that in the initial time moment
, the ball has a velocity
which is directed parallel to the plane
for the arbitrary point of the middle surface with the coordinates of
between the spheres. It means that
and
Hence, the initial conditions can be formulated in the following way:
If the angle
from the system of Equation (9), we can see that the motion occurs simply along the circumference of the radius
, where
and
are the radiuses of the inner and outer circles. If we put the condition
in Equation (9), we simplify the problem. Indeed, in accordance with previous works [
4,
5], we introduce the angle
as
, where
. In the result, we find the following system of equations:
In the particular case when the friction forces are taken into account, the problem is highly complicated. However, if the resistance forces are absent, we can present the equation of the plane of periodic motion in the form
, which accounts for the gravitation field. In the more general case, we need solve the following system of equations:
We can describe the boundary conditions in the following form:
(for more detail, see our previous paper [
4]).
Since our goal is to describe the motion on the planes
, we need to find the parametric dependences
. To solve this part of our problem, it is necessary turn to Equation (3) and account for the facts that on the one hand,
, and the other hand, the velocity is
in the fixed bases
. It means that
Since
and the movable bases are connected by linear transformations with the fixed bases
in the accordance with the following transformation:
we can write that the required equations describing the trajectory of the moving ball along the spherical surface are
We would like to note that the unitary vectors are subjected to the relations
Integrating Equation (16) in steps, we find that
As we can see from the systems in Equation (17), we are getting an ordinary transformation from Cartesian coordinates to spherical ones. If choose the initial values of the coordinates in the following form:
we can write from Equation (17) that
where it is necessary to recall that
.
Let us assume that the initial point of the motion on the spherical surface is
Then, in the result, the full system of equations is
(compare with the results of the papers [
4,
5]). The numerical analysis of Equation (19) shows that practically almost all initial conditions for the trajectory of the ball are almost immediately interrupted and the numerical solution leads to nowhere. This happens due to the singularity in the denominator of the function
, which leads to the singularity in the second line of Equation (19) for the function
at
, where
is a whole number.
In the accordance with the abovementioned, we can submit
in the form
where
is a small number.
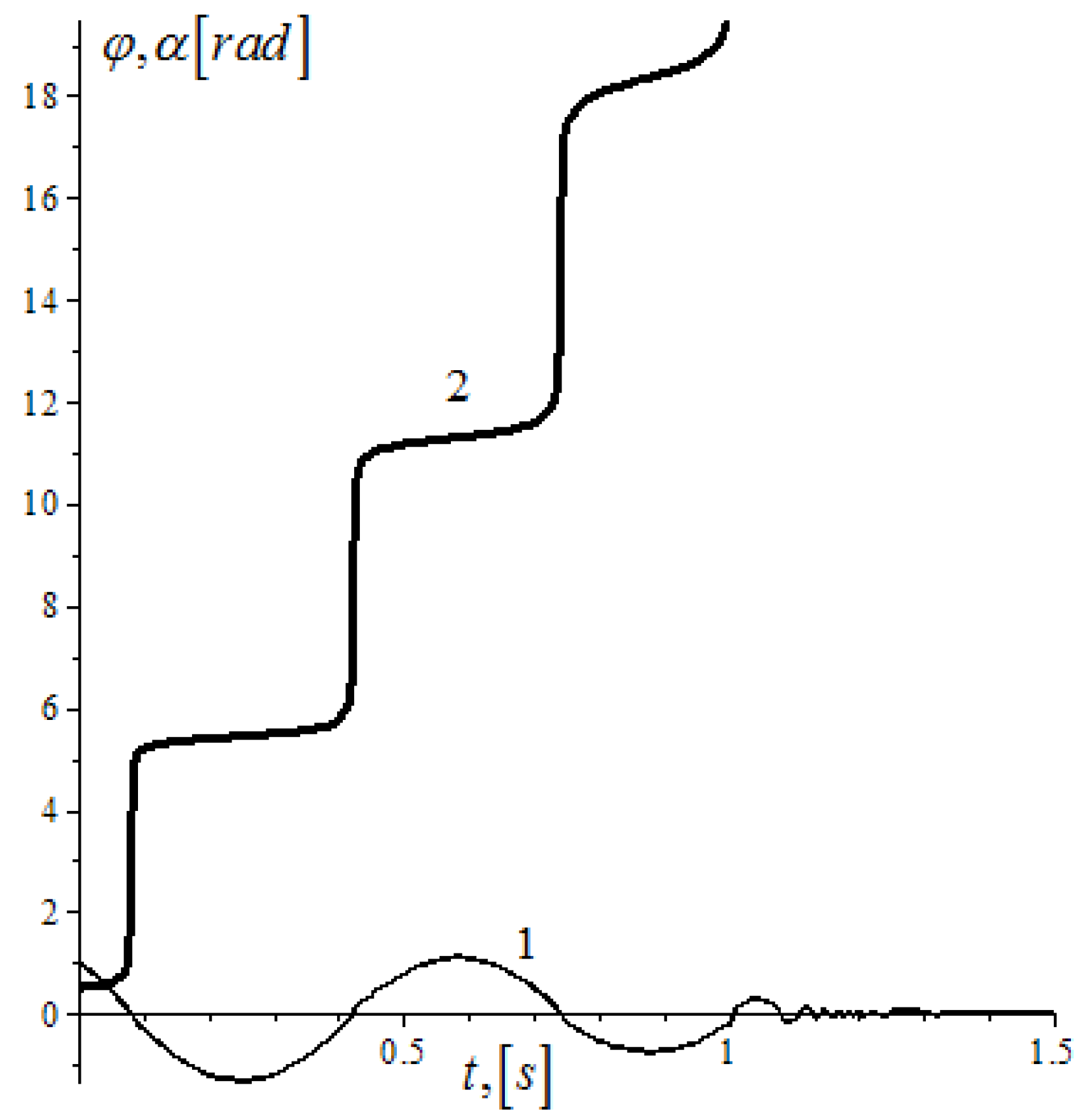
Taking into account Equation (20), the system of Equation (19) is solved remarkably. The dependences of
and
at
and
are illustrated by
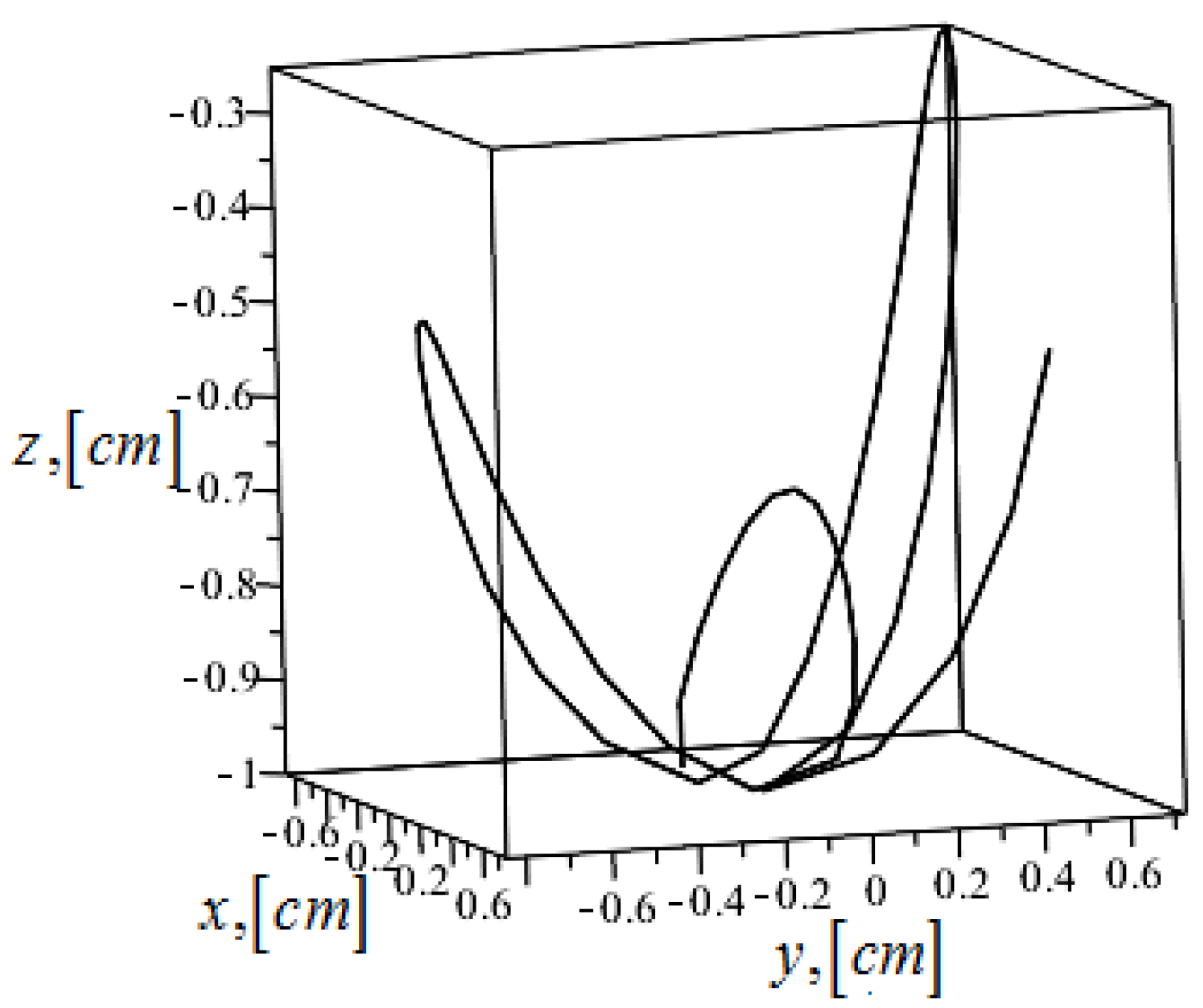
Figure 2. The three-dimensional trajectory of the ball in motion is found due to the numerical simulation of Equation (19) with the condition that the radius of the sphere is equal to the unity, and this is demonstrated in
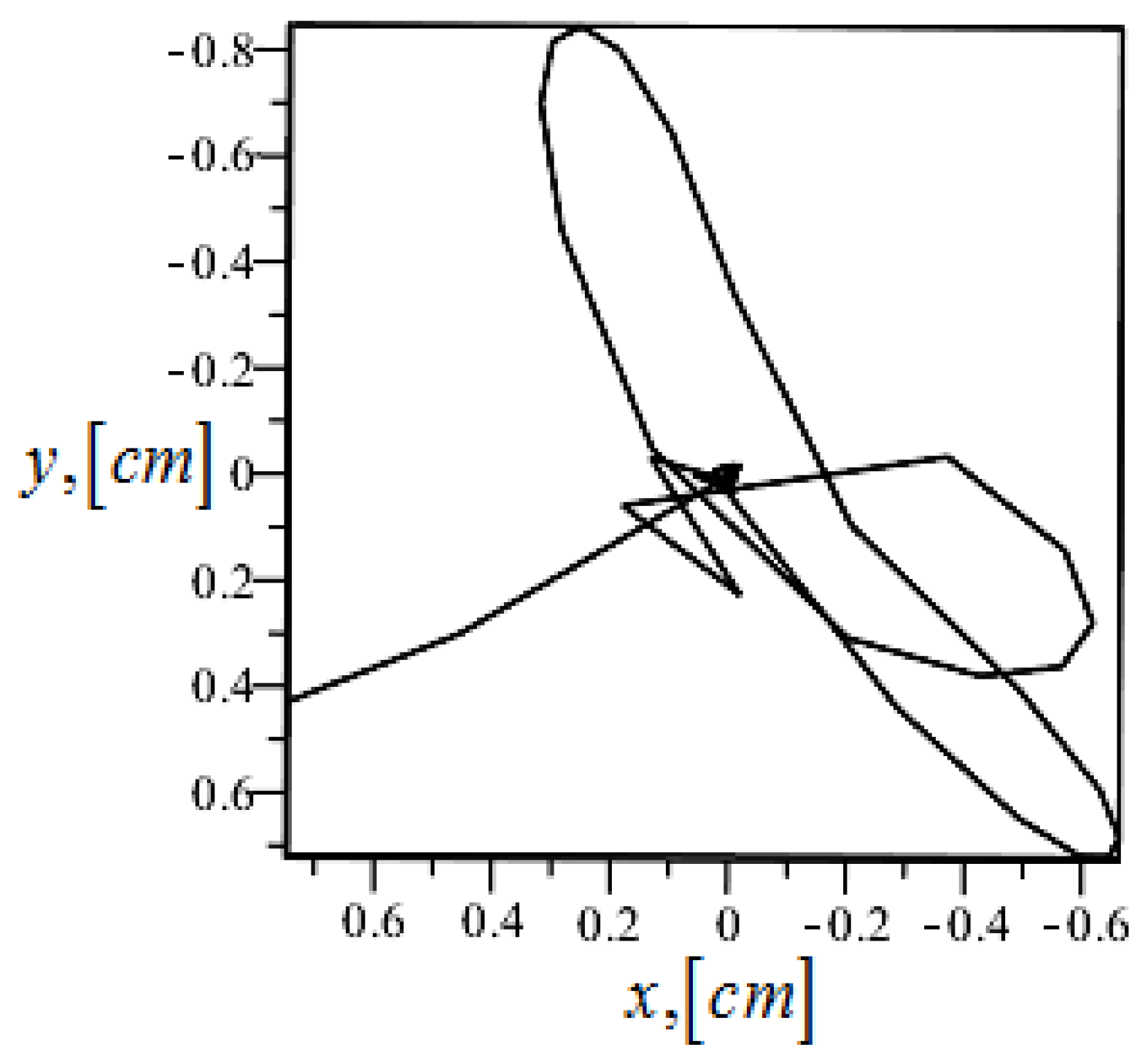
Figure 3. In accordance with these numerical solutions due to the transformations 3–5 of Equation (19), we can also find the trajectories of the motion in the projections on the coordinate planes
. In
Figure 4, as an example, is illustrated the corresponding dependence in the plane
.
We should notice that due to the lower transformations of Equation (9), we can also calculate the dependence of the reaction force of the shell when the ball moves between spherical surfaces. In this case, for the interruption values of the angle parameter , the reaction force will aperiodically “jump” in the condition that all changes of the parameters are continuous.
Moreover, we would like to pay attention to the case if we use the mathematical apparatus of the Euler angles
(see, for example, the monograph [
6]), where the description of the dynamics of the motion of the body between the surfaces of arbitrary shapes will be more complex. This problem will be addressed in a separate paper.

{kind=link}
{kind=link}
{kind=link}
{kind=link}



