An Error Indicator-Based Adaptive Reduced Order Model for Nonlinear Structural Mechanics—Application to High-Pressure Turbine Blades


Abstract
:1. Introduction
2. High-Fidelity Elastoviscoplastic Model
3. Reduced Order Modeling
- Operator compression: this step enables the efficient construction of (5), usually by replacing the computationally demanding integral evaluations by adapted approximation evaluated in computational complexity independent of N. In this work, we consider the empirical cubature method (ECM, see [34]), a method close to the energy conserving sampling and weighting (ECSW, see [35,36,37]) proposed earlier. Consider the vector of reduced internal forces appearing in (7):where the right-hand side is the high-fidelity quadrature formula used for numerical evaluation. In (8), the stress tensor for the considered reduced solution at variability and internal variables is seen as a function of space, and E denotes the set of elements of the mesh, denotes the number of integration points for the element e, and are the integration weights and points of the considered element. The ECM consists of replacing this high-fidelity quadrature (8) by an approximation adapted to the snapshots and the reduced order basis , and involving a small number of integration points:where , the reduced integration points , , are taken among the integration points of the high-fidelity quadrature (8) and the reduced integration weights are positive. We now briefly present how this reduced quadrature formula is obtained and we refer to [7,34] for more details. We denote , where and % are respectively the quotient and the remainder of the Euclidean division, is a subset of of size d, with the number of integration points, and and are such that for all and all ,where denotes the -th element of and where we recall that n is the number of snapshot POD modes. Let . From the introduced notation, , , which is a candidate approximation for , . The best reduced quadrature formula of length d for the reduced internal forces vector is obtained as (c.f. [34], Equation (23))where stands for the Euclidean norm. Taking the length of the reduced quadrature formula in the objective function yields a NP-hard optimization problem, see ([35], Section 5.3), citing [38]. To produce a reduced quadrature formula in a controlled return time, we consider a nonnegative orthogonal matching pursuit algorithm, see ([39], Algorithm 1) and Algorithm 2 below, a variant of the matching pursuit algorithm [40] tailored to the nonnegative requirement.A reduced quadrature is also used to accelerate the integral computation in (6). The remaining integral computations in (5) are and . They do not depend on the current solution, but only on the loading of the online variability , which is no longer efficient for nonparametrized variabilities. However, in our context of large scale nonlinear mechanics, these integrals are computed very fast with respect to the ones requiring behavior law resolutions, see Remark 1.
| Algorithm 1: Data compression by snapshot proper orthogonal decomposition (POD). |
| Input: tolerance , snapshots set Output: reduced order basis
|
| Algorithm 2: Nonnegative orthogonal matching pursuit. |
 |
| Algorithm 3: Dual quantity reconstruction of the cumulated plasticity p: offline stage of the reduced order model (ROM)-Gappy-POD. |
| Input: tolerance , cumulated plasticity snapshots set , indices of the integration points of the reduced quadrature formula Output: indices for online material law computation, ROM-Gappy-POD matrix
|
| Algorithm 4: Dual quantity reconstruction of the cumulated plasticity p: online stage of the ROM-Gappy-POD. |
| Input: online variability , indices for online material law computation, ROM-Gappy-POD matrix Output: reconstructed value for p on the complete domain
|
4. A Heuristic Error Indicator
4.1. First Results on Errors and Residuals
4.2. A Calibrated Error Indicator
| Algorithm 5: Calibration of the error indicator. |
 |
5. Numerical Applications
- (elas)
- Isotropic thermal expansion and temperature-dependent cubic elasticity: the behavior law is , where , with I the second-order identity tensor and the thermal expansion coefficient in MPa.K depending on the temperature. The elastic stiffness tensor does not depend on the solution u and is defined in Voigt notations bywhere the temperature T is given by the thermal loading, C is a reference temperature and the coefficients , and (elastic coefficients in MPa) depend on the temperature. This law does not feature any internal variable to compute.
- (evp)
- Norton flow with nonlinear kinematic hardening: the elastic part is given by , where and are the same as the (elas) law, is the plastic strain tensor. The viscoplastic part requires solving the system of ODEs:where p is the cumulated plasticity, defines the yield surface, (dimensionless) is the internal variable associated to the back-stress tensor representing the center of the elastic domain in the stress space, (with Tr the trace operator) is the deviatoric component of the stress tensor, and denotes the positive part operator. The yield criterion is . The hardening material coefficients C (in MPa) and D (dimensionless), the Norton material coefficient K (in MPa.s), the Norton exponential material coefficient m (dimensionless), and the initial yield stress (in MPa) depend on the temperature. The internal variables considered here are , and p, and the ODE’s initial conditions are , and at .
5.1. Academic Example
5.2. High-Pressure Turbine Blade
- [O1]
- in the a posteriori reduction of elastoviscoplastic computation, online variabilities of the temperature loading not encountered during the offline stage can lead to important errors,
- [O2]
6. Conclusions and Outlook
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| POD | Proper orthogonal decomposition |
| HF(M) | high-fidelity (model) |
| ROM | reduced order model |
| u | high-fidelity displacement field |
| reduced displacement field | |
| p | high-fidelity cumulated plasticity field |
| reduced cumulated plasticity field reconstructed by Gappy-POD | |
| vector of component the value of the high-fidelity cumulated plasticity field at the reduced integration points | |
| vector of component the cumulated plasticity computed by the behavior law solver at the reduced integration | |
| points during the online phase. Notice that this vector is not obtained by taking the value of some field at the | |
| reduced integration points. | |
| vector of component the value of the reduced cumulated plasticity field reconstructed by Gappy-POD at | |
| the reduced integration points | |
| relative error, defined in (12) | |
| ROM-Gappy-POD residual, defined in (13) | |
| proposed error indicator, defined in (19) | |
| reference high-fidelity cumulated plasticity field at the considered offline variability | |
| reference high-fidelity cumulated plasticity field at the considered online variability | |
| reduced cumulated plasticity field reconstructed by Gappy-POD without enrichement (no restart) |
References
- Mazur, Z.; Luna-Ramírez, A.; Juárez-Islas, J.; Campos-Amezcua, A. Failure analysis of a gas turbine blade made of Inconel 738LC alloy. Eng. Fail. Anal. 2005, 12, 474–486. [Google Scholar] [CrossRef]
- Cowles, B.A. High cycle fatigue in aircraft gas turbines—An industry perspective. Int. J. Fract. 1996, 80, 147–163. [Google Scholar] [CrossRef]
- Schulz, U.; Leyens, C.; Fritscher, K.; Peters, M.; Saruhan, B.; Lavigne, O.; Dorvaux, J.M.; Poulain, M.; Mévrel, R.; Caliez, M. Some Recent Trends in Research and Technology of Advanced Thermal Barrier Coatings. Aerosp. Sci. Technol. 2003, 7, 73–80. [Google Scholar] [CrossRef]
- Caron, P.; Lavigne, O. Recent studies at Onera on superalloys for single crystal turbine blades. AerospaceLab 2011, 3, 1–14. [Google Scholar]
- Amaral, S.; Verstraete, T.; Van den Braembussche, R.; Arts, T. Design and Optimization of the Internal Cooling Channels of a High Pressure Turbine Blade—Part I: Methodology. J. Turbomach. 2010, 132, 021013. [Google Scholar] [CrossRef]
- Verstraete, T.; Amaral, S.; Van den Braembussche, R.; Arts, T. Design and Optimization of the Internal Cooling Channels of a High Pressure Turbine Blade—Part II: Optimization. J. Turbomach. 2010, 132, 021014. [Google Scholar] [CrossRef]
- Casenave, F.; Akkari, N.; Bordeu, F.; Rey, C.; Ryckelynck, D. A Nonintrusive Distributed Reduced Order Modeling Framework for Nonlinear Structural Mechanics—Application to Elastoviscoplastic Computations. arXiv 2018, arXiv:1812.07228. [Google Scholar]
- File:GaTurbineBlade.svg. Wikipedia, the Free Encyclopedia, Image under the Creative Commons Attribution-Share Alike 3.0 Unported license 2009. Available online: https://commons.wikimedia.org/wiki/File:GaTurbineBlade.svg (accessed on 18 April 2019).
- Maday, Y.; Patera, A.T.; Turinici, G. A priori convergence theory for reduced-basis approximations of single-parameter elliptic partial differential equations. J. Sci. Comput. 2002, 17, 437–446. [Google Scholar] [CrossRef]
- Machiels, L.; Maday, Y.; Oliveira, I.B.; Patera, A.T.; Rovas, D.V. Output bounds for reduced-basis approximations of symmetric positive definite eigenvalue problems. C. R. Acad. Sci. Ser. I Math. 2000, 331, 153–158. [Google Scholar] [CrossRef]
- Maday, Y.; Patera, A.; Turinici, G. Global a priori convergence theory for reduced-basis approximations of single-parameter symmetric coercive elliptic partial differential equations. C. R. Acad. Sci. Ser. I Math. 2002, 335, 289–294. [Google Scholar] [CrossRef]
- Yano, M. A Space-Time Petrov–Galerkin Certified Reduced Basis Method: Application to the Boussinesq Equations. SIAM J. Sci. Comput. 2014, 36, A232–A266. [Google Scholar] [CrossRef]
- Ohlberger, M.; Rave, S. Nonlinear reduced basis approximation of parameterized evolution equations via the method of freezing. C. R. Math. 2013, 351, 901–906. [Google Scholar] [CrossRef]
- Manzoni, A. An efficient computational framework for reduced basis approximation and a posteriori error estimation of parametrized Navier–Stokes flows. ESAIM Math. Model. Numer. Anal. 2014, 48, 1199–1226. [Google Scholar] [CrossRef]
- Casenave, F. Accurate a posteriori error evaluation in the reduced basis method. C. R. Math. 2012, 350, 539–542. [Google Scholar] [CrossRef]
- Casenave, F.; Ern, A.; Lelièvre, T. Accurate and online-efficient evaluation of the a posteriori error bound in the reduced basis method. ESAIM Math. Model. Numer. Anal. 2014, 48, 207–229. [Google Scholar] [CrossRef]
- Buhr, A.; Engwer, C.; Ohlberger, M.; Rave, S. A numerically stable a posteriori error estimator for reduced basis approximations of elliptic equations. In Proceedings of the 11th World Congress on Computational Mechanics, WCCM 2014, 5th European Conference on Computational Mechanics, ECCM 2014 and 6th European Conference on Computational Fluid Dynamics, ECFD 2014, Barcelona, Spain, 20–25 July 2014; pp. 4094–4102. [Google Scholar]
- Chen, Y.; Jiang, J.; Narayan, A. A robust error estimator and a residual-free error indicator for reduced basis methods. Comput. Math. Appl. 2019, 77, 1963–1979. [Google Scholar] [CrossRef]
- Chinesta, F.; Leygue, A.; Bordeu, F.; Aguado, J.V.; Cueto, E.; González, D.; Alfaro, I.; Ammar, A.; Huerta, A. PGD-based computational vademecum for efficient design, optimization and control. Arch. Comput. Methods Eng. 2013, 20, 31–59. [Google Scholar] [CrossRef]
- Ladevèze, P.; Chouaki, A. Application of a posteriori error estimation for structural model updating. Inverse Probl. 1999, 15, 49. [Google Scholar] [CrossRef]
- Ladevèze, P.; Chamoin, L. Toward guaranteed PGD-reduced models. In Bytes and Science; CIMNE: Barcelona, Spain, 2013; pp. 143–154. [Google Scholar]
- Chamoin, L.; Pled, F.; Allier, P.E.; Ladevèze, P. A posteriori error estimation and adaptive strategy for PGD model reduction applied to parametrized linear parabolic problems. Comput. Methods Appl. Mech. Eng. 2017, 327, 118–146. [Google Scholar] [CrossRef]
- Chatterjee, A. An introduction to the proper orthogonal decomposition. Curr. Sci. 2000, 78, 808–817. [Google Scholar]
- Sirovich, L. Turbulence and the dynamics of coherent structures, Parts I, II and III. Q. Appl. Math. 1987, XLV, 561–590. [Google Scholar] [CrossRef]
- Tröltzsch, F.; Volkwein, S. POD a-posteriori error estimates for linear-quadratic optimal control problems. Comput. Optim. Appl. 2009, 44, 83. [Google Scholar] [CrossRef]
- Luo, Z.; Zhu, J.; Wang, R.; Navon, I.M. Proper orthogonal decomposition approach and error estimation of mixed finite element methods for the tropical Pacific Ocean reduced gravity model. Comput. Methods Appl. Mech. Eng. 2007, 196, 4184–4195. [Google Scholar] [CrossRef]
- Kammann, E.; Tröltzsch, F.; Volkwein, S. A Method of a-Posteriori Error Estimation with Application to Proper Orthogonal Decomposition. Available online: https://pdfs.semanticscholar.org/7212/a310a9c0874d6e069e77b5f97aeb3f57f4df.pdf (accessed on 16 April 2019).
- Henneron, T.; Mac, H.; Clenet, S. Error estimation of a proper orthogonal decomposition reduced model of a permanent magnet synchronous machine. In Proceedings of the 9th IET International Conference on Computation in Electromagnetics (CEM 2014), London, UK, 31 March–1 April 2014; pp. 1–6. [Google Scholar]
- Wang, A.; Ma, Y. An error estimate of the proper orthogonal decomposition in model reduction and data compression. Numer. Methods Part. Differ. Equ. 2009, 25, 972–989. [Google Scholar] [CrossRef]
- Ryckelynck, D.; Gallimard, L.; Jules, S. Estimation of the validity domain of hyper-reduction approximations in generalized standard elastoviscoplasticity. Adv. Model. Simul. Eng. Sci. 2015, 2, 6. [Google Scholar] [CrossRef]
- Ryckelynck, D. Estimation d’erreur d’hyperréduction de problèmes élastoviscoplastiques. In Proceedings of the 21ème Congrès Français de Mécanique, 2013, Bordeaux, France, 26–30 August 2013. [Google Scholar]
- Akkari, N.; Hamdouni, A.; Liberge, E.; Jazar, M. On the sensitivity of the POD technique for a parameterized quasi-nonlinear parabolic equation. Adv. Model. Simul. Eng. Sci. 2014, 1, 1–14. [Google Scholar] [CrossRef]
- Mines ParisTech and ONERA the French Aerospace lab. Z-set: Nonlinear Material & Structure Analysis Suite. 1981–Present. Available online: http://www.zset-software.com (accessed on 16 April 2019).
- Hernandez, J.A.; Caicedo, M.A.; Ferrer, A. Dimensional hyper-reduction of nonlinear finite element models via empirical cubature. Comput. Methods Appl. Mech. Eng. 2017, 313, 687–722. [Google Scholar] [CrossRef]
- Farhat, C.; Avery, P.; Chapman, T.; Cortial, J. Dimensional reduction of nonlinear finite element dynamic models with finite rotations and energy-based mesh sampling and weighting for computational efficiency. Int. J. Numer. Methods Eng. 2014, 98, 625–662. [Google Scholar] [CrossRef]
- Farhat, C.; Chapman, T.; Avery, P. Structure-preserving, stability, and accuracy properties of the energy-conserving sampling and weighting method for the hyper reduction of nonlinear finite element dynamic models. Int. J. Numer. Methods Eng. 2015, 102, 1077–1110. [Google Scholar] [CrossRef]
- Paul-Dubois-Taine, A.; Amsallem, D. An adaptive and efficient greedy procedure for the optimal training of parametric reduced-order models. Int. J. Numer. Methods Eng. 2015, 102, 1262–1292. [Google Scholar] [CrossRef]
- Amaldi, E.; Kann, V. On the approximability of minimizing nonzero variables or unsatisfied relations in linear systems. Theor. Comput. Sci. 1998, 209, 237–260. [Google Scholar] [CrossRef]
- Yaghoobi, M.; Wu, D.; Davies, M.E. Fast non-negative orthogonal matching pursuit. IEEE Signal Process. Lett. 2015, 22, 1229–1233. [Google Scholar] [CrossRef]
- Mallat, S.G.; Zhang, Z. Matching pursuits with time-frequency dictionaries. IEEE Trans. Signal Process. 1993, 41, 3397–3415. [Google Scholar] [CrossRef]
- Everson, R.; Sirovich, L. Karhunen–Loève procedure for gappy data. J. Opt. Soc. Am. A 1995, 12, 1657–1664. [Google Scholar] [CrossRef]
- Barrault, M.; Maday, Y.; Nguyen, N.C.; Patera, A.T. An ‘empirical interpolation’ method: Application to efficient reduced-basis discretization of partial differential equations. C. R. Math. 2004, 339, 667–672. [Google Scholar] [CrossRef]
- Maday, Y.; Nguyen, N.C.; Patera, A.T.; Pau, S.H. A general multipurpose interpolation procedure: The magic points. Commun. Pure Appl. Anal. 2009, 8, 383–404. [Google Scholar] [CrossRef]
- Maday, Y.; Mula, O.; Turinici, G. Convergence analysis of the Generalized Empirical Interpolation Method. SIAM J. Numer. Anal. 2016, 54, 1713–1731. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Ryckelynck, D.; Chinesta, F.; Cueto, E.; Ammar, A. On thea priori model reduction: Overview and recent developments. Arch. Comput. Methods Eng. 2006, 13, 91–128. [Google Scholar] [CrossRef]
- Bovet, C.; Parret-Fréaud, A.; Spillane, N.; Gosselet, P. Adaptive multipreconditioned FETI: Scalability results and robustness assessment. Comput. Struct. 2017, 193, 1–20. [Google Scholar] [CrossRef]
- Ahrens, J.; Geveci, B.; Law, C. ParaView: An End-User Tool for Large Data Visualization, Visualization Handbook; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Ayachit, U. The ParaView Guide: A Parallel Visualization Application; Kitware: Clifton Park, NY, USA, 2015. [Google Scholar]






 ) and pressure coefficient (
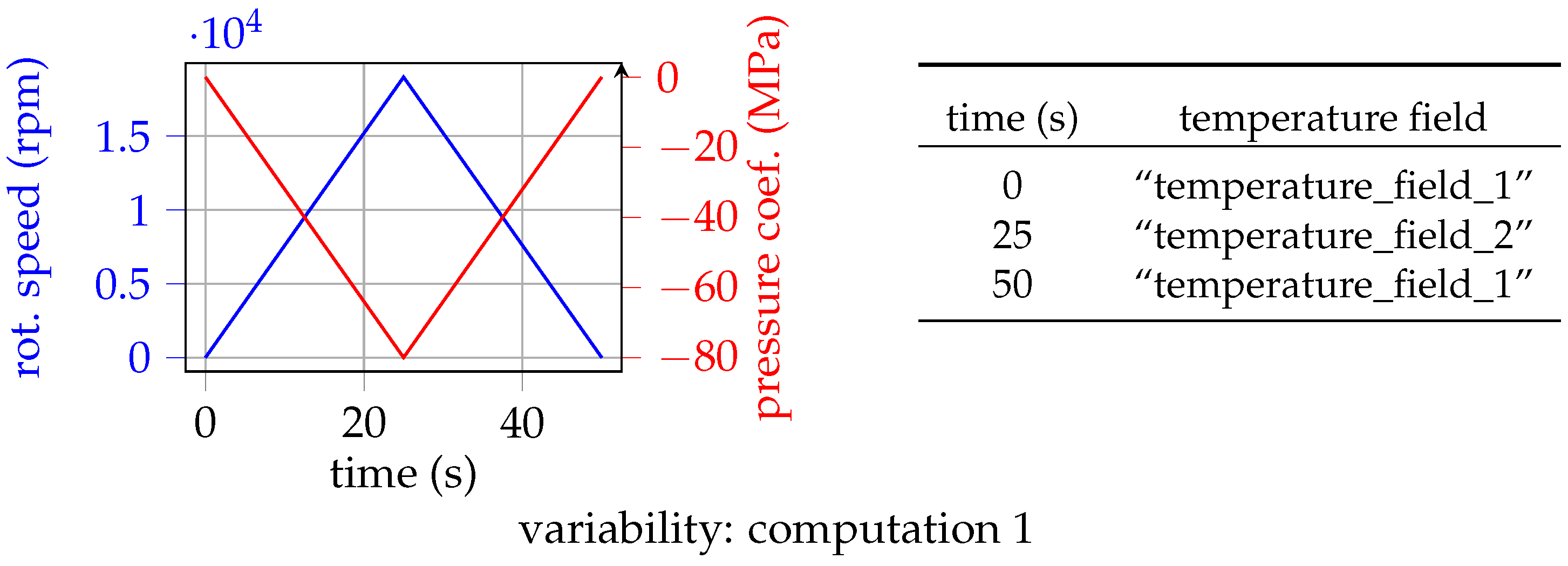
) and pressure coefficient (  ) with respect to time. (right) Temporal sequence for the temperature field.
) and pressure coefficient ( ) with respect to time. (right) Temporal sequence for the temperature field.
) with respect to time. (right) Temporal sequence for the temperature field.
) and pressure coefficient ( ) with respect to time. (right) Temporal sequence for the temperature field.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| number of dofs | 78,120 |
| number of (quadratic) tetrahedra | 16,695 |
| number of integration points | 81,375 |
| number of time steps | computation 1: 50, computation 2: 40, new: 50 |
| behavior law | evp (Norton flow with nonlinear kinematic hardening) |
| p | ||
|---|---|---|
| computation 1 |  |  |
| computation 2 |  |  |
| Offline | Computation 1 | Computation 1 and Computation 2 | |
|---|---|---|---|
| Online | |||
| computation 1 |  |  | |
| computation 2 |  |  | |
| new |  |  | |
| Offline | Computation 1 | Computation 1 and Computation 2 | |
|---|---|---|---|
| Online | |||
| computation 1 |  |  | |
| computation 2 |  |  | |
| new |  |  | |
| number of dofs | 4,892,463 |
| number of (quadratic) tetrahedra | 1,136,732 |
| number of integration points | 5,683,660 |
| number of time steps | 50 |
| behavior law for the foot | elas (temperature-dependent cubic elasticity and isotropic thermal expansion) |
| behavior law for the blade | evp (Norton flow with nonlinear kinematic hardening) |
| Step | Algorithm |
|---|---|
| Data generation | AMPFETI solver in Z-set, |
| Data compression | Distributed Snapshot POD, |
| Operator compression | Distributed NonNegative Orthogonal Matching Pursuit, |
| Reduced order model | |
| Dual quantities reconstruction | Distributed Gappy-POD, |
| p | ||
|---|---|---|
| subdomain 28 |  |  |
| subdomain 47 |  |  |
| Plot | Subdomain 28 | Subdomain 27 | |
|---|---|---|---|
| Enrichment | |||
| no enrichment |  |  | |
| monitoring subdomain 28 |  |  | |
| monitoring subdomain 47 |  |  | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Casenave, F.; Akkari, N. An Error Indicator-Based Adaptive Reduced Order Model for Nonlinear Structural Mechanics—Application to High-Pressure Turbine Blades. Math. Comput. Appl. 2019, 24, 41. https://doi.org/10.3390/mca24020041
Casenave F, Akkari N. An Error Indicator-Based Adaptive Reduced Order Model for Nonlinear Structural Mechanics—Application to High-Pressure Turbine Blades. Mathematical and Computational Applications. 2019; 24(2):41. https://doi.org/10.3390/mca24020041
Chicago/Turabian StyleCasenave, Fabien, and Nissrine Akkari. 2019. "An Error Indicator-Based Adaptive Reduced Order Model for Nonlinear Structural Mechanics—Application to High-Pressure Turbine Blades" Mathematical and Computational Applications 24, no. 2: 41. https://doi.org/10.3390/mca24020041
APA StyleCasenave, F., & Akkari, N. (2019). An Error Indicator-Based Adaptive Reduced Order Model for Nonlinear Structural Mechanics—Application to High-Pressure Turbine Blades. Mathematical and Computational Applications, 24(2), 41. https://doi.org/10.3390/mca24020041