1. Introduction
The finite element (FE) method currently represents the most-utilized computational approach to solve several engineering problems and in applications whose solutions cannot be obtained analytically [
1]. The technological advancements in computer sciences have allowed a fast and easy diffusion of this technique, especially in terms of structural mechanics problems. The key to the success of the FE method lies in the reduction of complex problems into simpler ones in which the reference domain is made of several discrete elements, and in its easy computational implementation. This idea was first highlighted by Duncan and Collar [
2,
3], and successively emphasized by Hrennikoff [
4], Courant [
5], Clough [
6], and Melosh [
7].
The approximate solutions that can be obtained by means of the FE approach are accurate and representative of the physical problem under consideration [
8,
9]. To the best of the authors’ knowledge, the progression and development of this technique are well-described in many pertinent books, such as the ones by Oden [
10], Oden and Reddy [
11], Hinton [
12], Zienkiewicz [
13], Reddy [
14], Onate [
15], Hughes [
16], and Ferreira [
17]. These books should be used as references for the theoretical background of the numerical approach at issue. For completeness purposes, it should be recalled that various and alternative approaches have been developed in past decades to obtain approximated but accurate solutions to several complex structural problems, not only based on the FE method [
18,
19,
20,
21].
An intriguing application that is efficiently solved by means of the FE methodology is about the structural response of plates and panels made of composite materials [
22,
23,
24]. With respect to an isotropic and conventional medium, a composite material can reach superior performance by combining two (or more) constituents. A typical example of this category are fiber-reinforced composites, in which the high-strength fibers are the main load-carrying elements, whereas the matrix has the task of keeping them together and protecting the reinforcing phase from the environment [
25,
26,
27,
28]. In general, a micromechanical approach should be employed to evaluate the overall mechanical properties of these materials, starting from the features of the single constituents. The review paper by Chamis and Sendeckyj represents a fundamental contribution is this direction [
29]. One of the most effective approaches that can be used toward this aim is the one proposed by Halpin [
30] and Tsai [
31,
32], who developed a semi-empirical method and expressed the mechanical properties of the constituents in terms of Hill’s elastic moduli [
33,
34]. Further details concerning the micromechanics of fiber-reinforced composite materials can be found in [
35].
The use of a versatile numerical method also allows us to investigate the structural response of composite structures with non-uniform mechanical properties. In particular, in the present paper the reinforcing fibers are characterized by a gradual variation of their volume fraction along the plate thickness, following the same idea of functionally graded materials [
36,
37,
38,
39,
40,
41,
42,
43,
44,
45,
46,
47,
48,
49,
50,
51,
52]. With respect to this class of materials, in which the composites turn out to be isotropic, the layers of the plate assume orthotropic features and can also be oriented. This topic clearly falls within the aim of the optimal design of composite structures [
53,
54,
55,
56,
57,
58]. It should be mentioned that a similar approach is followed in the design of functionally graded carbon-nanotube-reinforced composites, due to the advancements in nanostructures and nanotechnologies [
59,
60,
61,
62,
63,
64,
65,
66,
67,
68].
In this paper, the research is organized in two main sections. After this brief introduction, the FE formulation for laminated thick and thin plates is presented in
Section 2. Here, the theoretical framework is based on the well-known first-order shear deformation theory (FSDT) for laminated composite structures [
69,
70]. The effect of the shear correction factor is also discussed in order to deal with thin plates [
71]. In addition, the micromechanics approach based on the Halpin–Tsai model is described in detail, by also introducing the topic of variable mechanical properties.
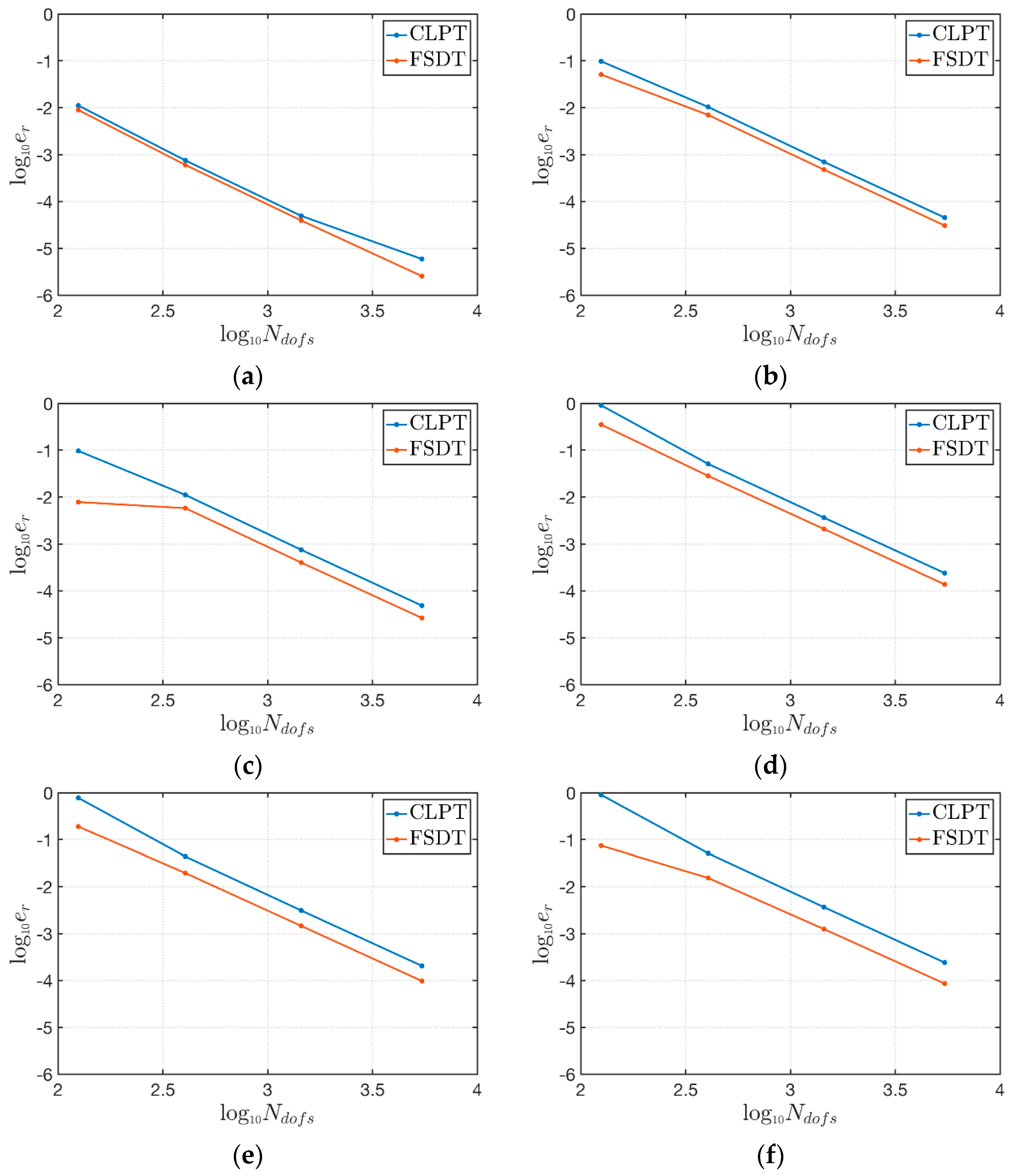
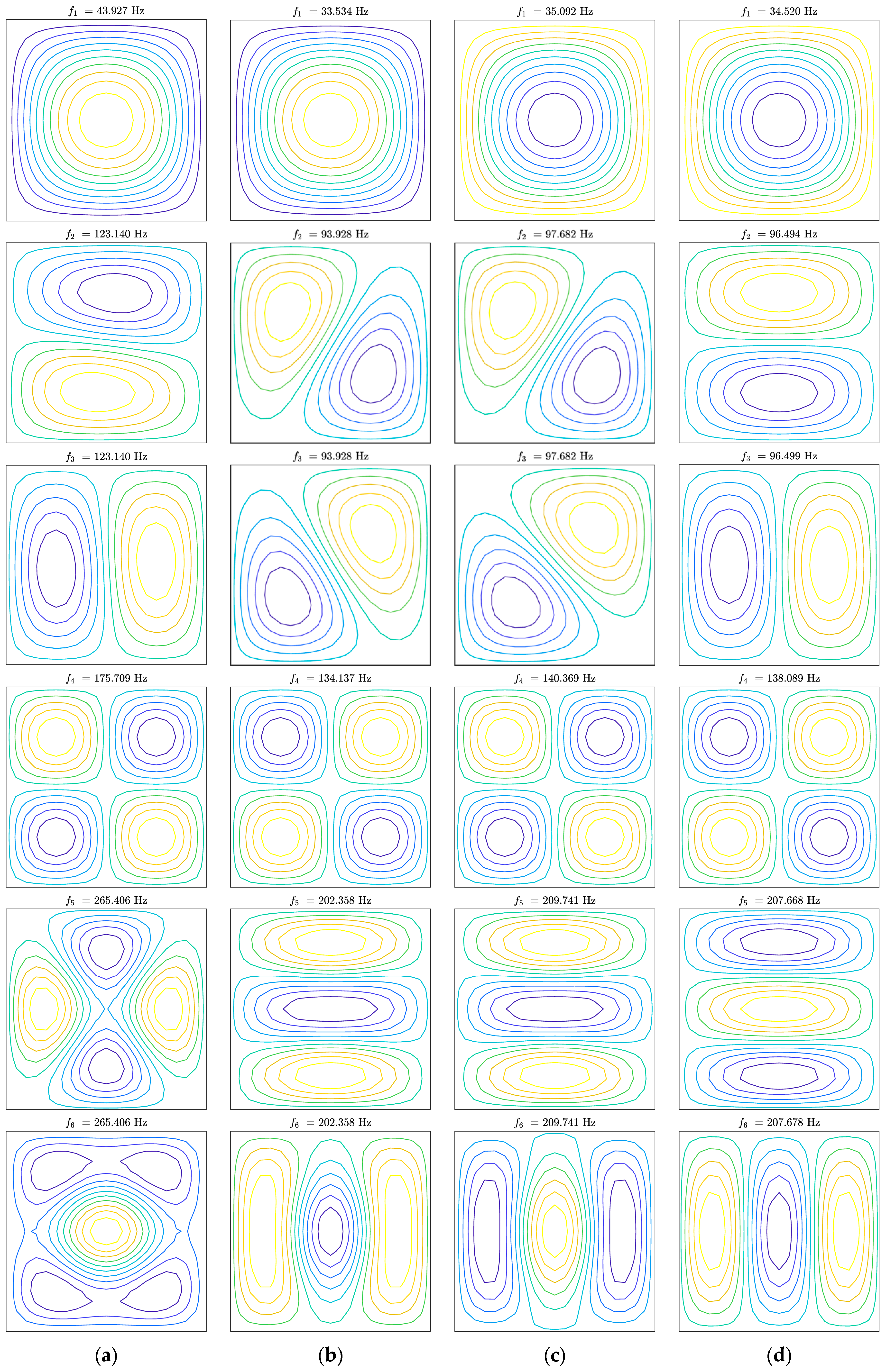
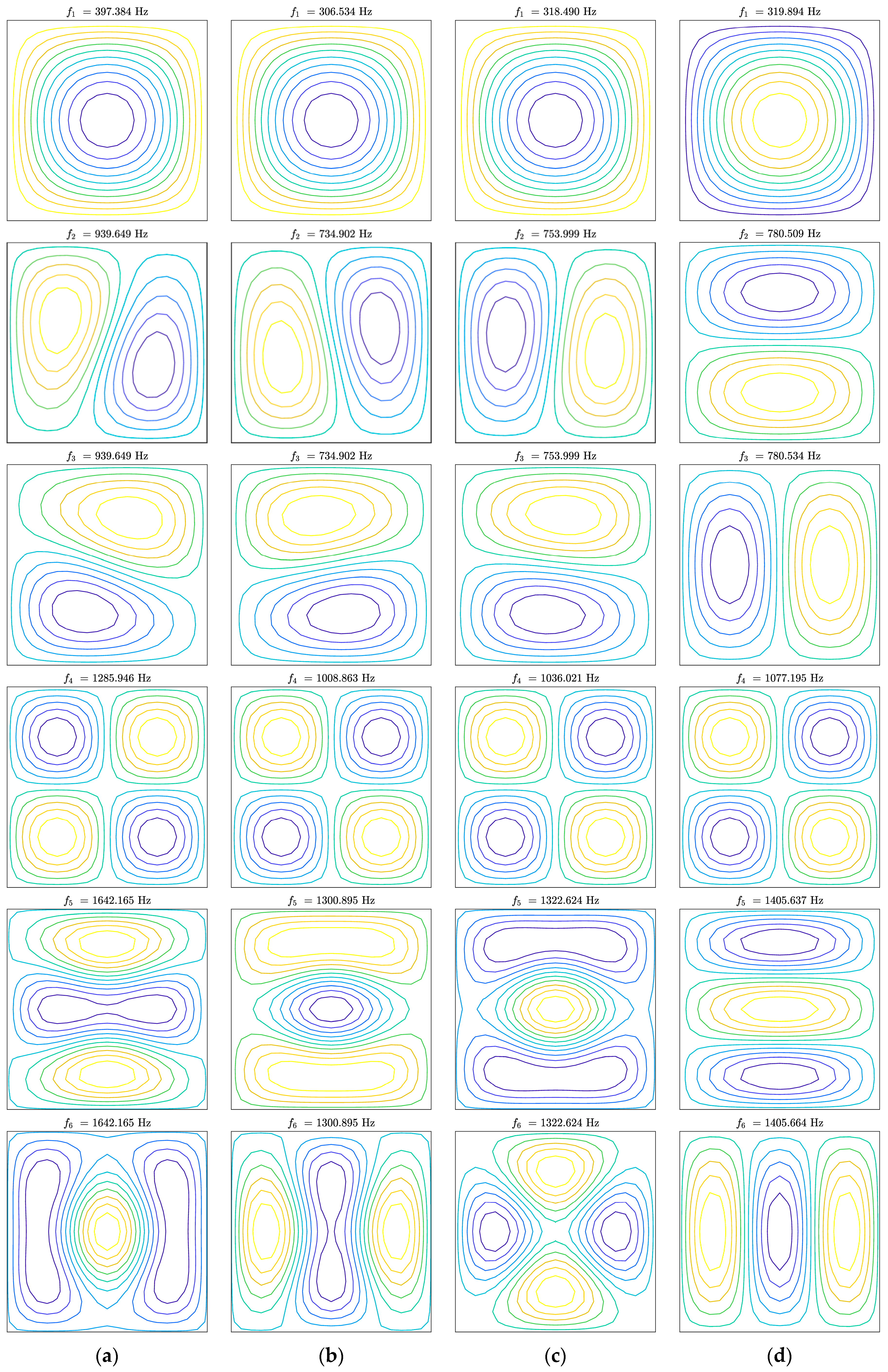
Section 3 presents the results of the numerical applications. As a preliminary test, the accuracy and convergence features of the numerical approach are discussed by means of the comparison with the semi-analytical solutions available in the literature for thin and thick laminated composite plates. Then, the natural frequencies of functionally graded orthotropic cross-ply plates are presented for several mechanical configurations. Finally,
Appendix A is added to define the terms of the fundamental operators of the proposed FE formulation.
2. Finite Element (FE) Formulation for Laminated Thick and Thin Plates
The theoretical framework of the current research is based on the first-order shear deformation theory (FSDT). The governing equations are presented in this section by developing the corresponding FE formulation. The following kinematic model is assumed within each discrete element of the plate [
69]:
where
are the three-dimensional displacements of the structure, whereas the degrees of freedom of the problem are given by three translations
and two rotations
defined on the plate middle surface. These quantities can be conveniently collected in the corresponding vector
, defined below
The coordinates
specify the local reference system of the plate and
is the time variable. The superscript
clearly specifies that this model is valid for each element. The geometry of the plate is fully described once the lengths
of its sides and its overall thickness
are defined. It should be recalled that for a laminate structure one gets
in which
stand for the upper and lower coordinates of the
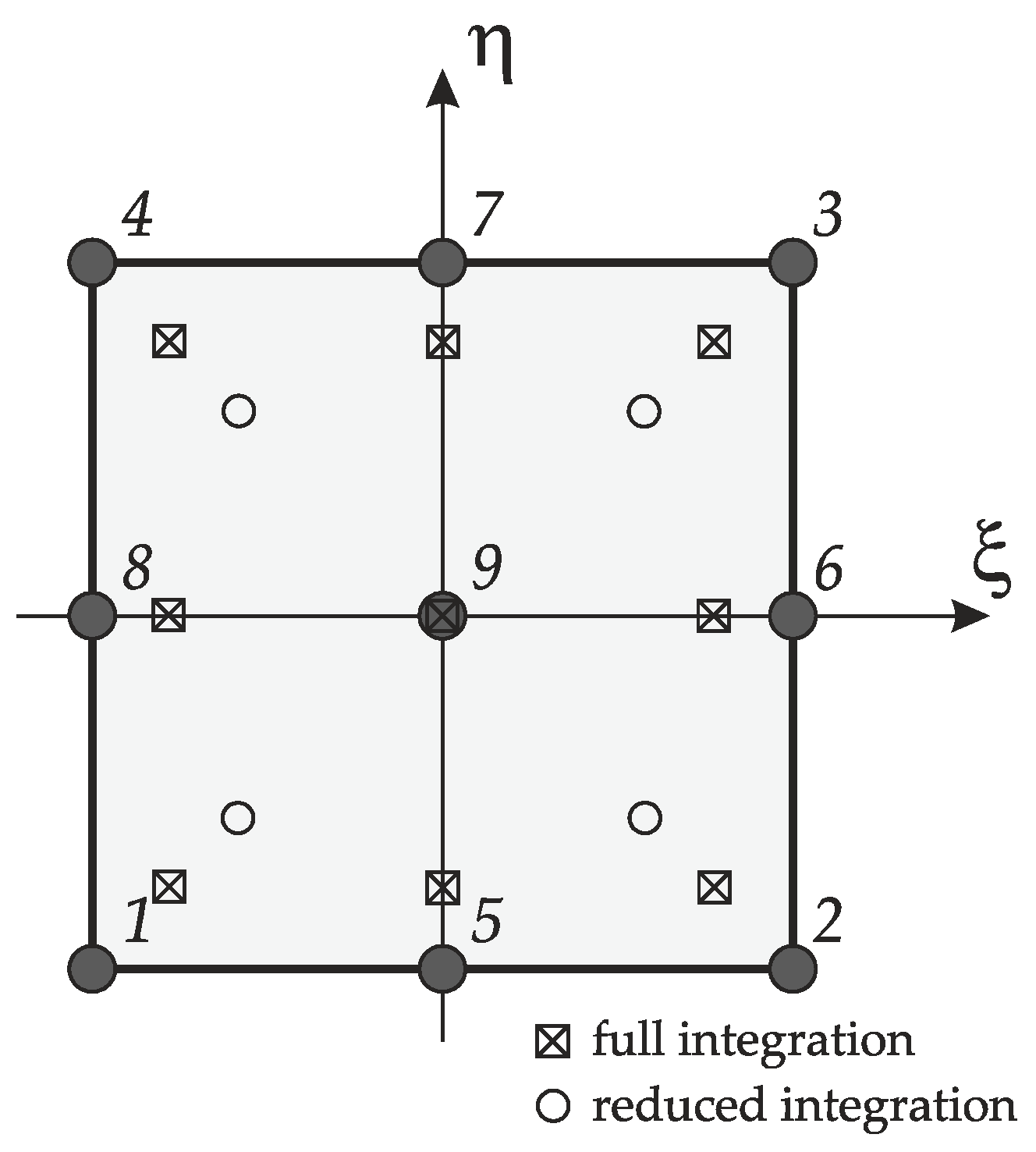
-th layer, respectively. The degrees of the freedom (2) are approximated in each element by means of quadratic Lagrange interpolation functions. As can be noted from
Figure 1, nine nodes are introduced in each subdomain. As a consequence, the degrees of freedom assume the following aspect:
where
represents the
-th shape function, whereas
denote the nodal displacements, which can be included in the corresponding vectors
On the other hand, the shape functions linked to the nine nodes of the finite element are included in the vector
, defined below:
For the sake of clarity, it should be recalled that the nodes are identified in each element by following the numbering specified in
Figure 1.
At this point, the nodal degrees of freedom can be collected in a sole vector
to simplify the nomenclature:
and to write the definitions (4) by using the following matrix notation:
The size of each matrix is indicated under the corresponding symbol. It is important to specify that the same approximation is employed for all degrees of freedom (both translational and rotational displacements).
As mentioned in the books by Reddy [
14] and Ferreira [
17], it is convenient to introduce the natural coordinates
within the reference finite element, which is called the master element (or parent element). In this reference system, which is also depicted in
Figure 1, the shape functions
assume the following definitions:
for
. The same functions are also used to describe the geometry of each discrete element according to the principles of the isoparametric FE formulation. The coordinate change between the physical domain and the parent element is accomplished through the relations shown below
where the couple
defines the coordinates of the
-th node of the generic element. For the sake of conciseness, these quantities can be collected in the corresponding vectors
:
The Jacobian matrix
related to the coordinate change (10) can be now introduced in order to evaluate the derivatives with respect to the natural coordinates of the parent element:
where the vectors
collect the derivatives of the shape functions (9) with respect to
At this point, the compatibility equations can be presented to define the strain components in each element. In particular, the membrane strains are given by
On the other hand, the bending and twisting curvatures can be defined as follows:
Finally, the shear strains assume the following definitions:
Note that the derivatives of the shape functions with respect to the physical coordinates
are introduced and collected in the corresponding vectors
. They can be computed as follows by inverting the Jacobian matrix (this procedure is admissible if its determinant is greater than zero):
The following matrix notation can be used to collect and define the strains previously introduced in (14)–(16):
The vector
collects the aforementioned strain components. Such terms are needed to compute the stress resultants in each element by means of the constitutive relation shown below in matrix form:
in which
are the membrane forces,
the bending and twisting moments, and
the shear stresses. On the other hand,
stands for the shear correction factor. For moderately thick and thick plates, which are commonly studied through the FSDT, the shear correction factor is generally assumed equal to
. Nevertheless, the same structural model can be employed to accurately investigate the mechanical behavior of thin plates, which are usually analyzed in the theoretical framework provided by the classical laminated plate theory (CLPT), taking the Kirchhoff hypothesis into account. This theory neglects the shear stresses, and the same circumstance can be obtained from the FSDT by setting
as the shear correction factor. In other words, the effect of shear stresses is negligible if the shear stiffness is extremely large [
71].
The stress resultants can be also expressed as follows in extended matrix form in terms of nodal displacements, having in mind the definitions (18)
or in compact matrix form
where the meaning of the constitutive operator
can be deduced from Equation (19). It should be observed that the mechanical properties are the same in each element, and the corresponding coefficients are defined as
where
represents the stiffnesses of the
-th orthotropic layer, which can be oriented as
. Once the orientation of the fibers is defined, the following relations are employed to compute the coefficients
:
where the quantities
are defined below in terms of the engineering constants of the corresponding layer, which are the Young’s moduli
, the shear moduli
, and the Poisson’s ratio
:
It should be recalled that the Poisson’s ratio can be evaluated by using the well-known relation for orthotropic materials .
The engineering constants are computed by means of the Halpin–Tsai approach, once the mechanical features of the reinforcing fibers and the epoxy resin of the orthotropic fiber-reinforced layers are known. As highlighted in [
35], this methodology can be applied by using Hill’s elastic moduli and a semi-empirical approach. The reinforcing fibers are modeled as a transversely isotropic material, and the following engineering constants are required to characterize them: the Young’s moduli
, the shear modulus
, and the Poisson’s ratios
. The Hills’s elastic moduli of the fibers
are given by:
On the other hand, the epoxy resin is modeled as an isotropic medium characterized by its Young’s modulus
and its Poisson’s ratio
. The Hill’s elastic moduli of the matrix
are defined below:
At this point, the overall mechanical properties of the composite material can be computed in terms of the Hill’s elastic moduli
:
where
are the volume fractions of the fibers and of the matrix, respectively. They are related by the following relation:
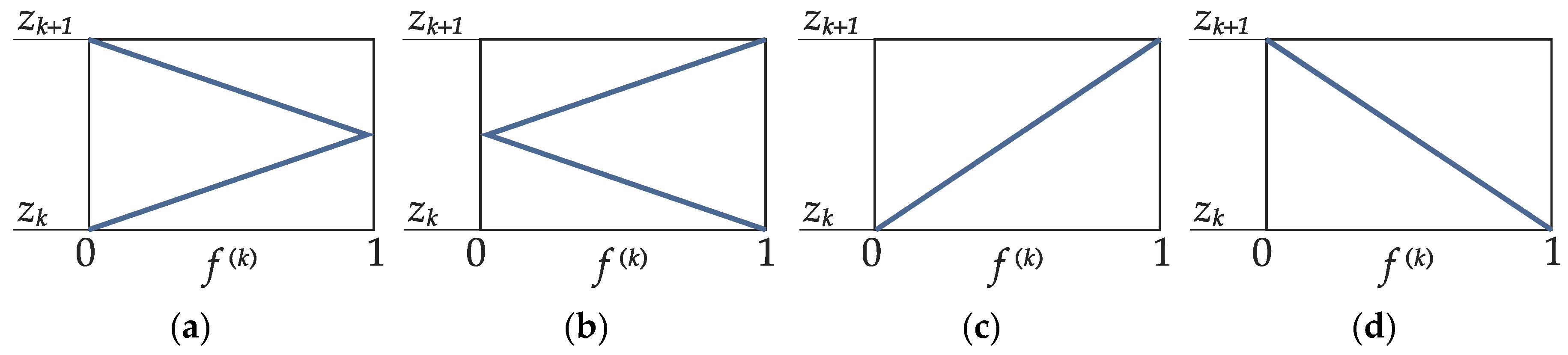
. In the current research, a non-uniform distribution of the fibers is defined along the plate thickness. Therefore, the volume fraction of the reinforcing fibers turns out to be a function of the thickness coordinate
, in which
represents a constant value. This idea is representative of functionally graded materials. Several distributions
can be introduced toward this aim, and can be applied in each layer separately. The following functions are used in this paper:
For the sake of completeness, these functions are depicted in
Figure 2.
Once the Hill’s elastic moduli (27) are computed, the engineering constants of the
-th fiber reinforced composite layer can be evaluated as well. The definitions shown below are required for this purpose:
It should be noted that these quantities are all functions of the thickness coordinate due to the relations (28). As a consequence, the material properties defined in (23) depend also on the coordinate , and the integrals in (22) have to be computed numerically. The function “trapz” embedded in MATLAB was employed toward this aim.
At this point, the Hamilton’s variational principle can be applied to obtain the equations of motion and the corresponding weak form [
23]. As a result, it is possible to write the dynamic fundamental system in each element as follows:
where the stiffness matrix of the element is denoted by
, whereas the mass matrix is identified by
. On the other hand, the vector
collects the second-order derivatives with respect to the time variable
of the nodal displacements (7). By definition, the stiffness matrix
assumes the following aspect:
where the operators
of size 9 × 9 are illustrated in
Appendix A. Analogously, the mass matrix
can be written as follows:
where the operators
of size 9 × 9 are also illustrated in
Appendix A. The matrix
instead collects the inertia terms and assumes the definition shown below:
in which
where
is the density of the
-th layer. Its value can be obtained by means of the rule of mixture, combining the densities of the reinforcing fibers
and of the matrix
:
Note that the density is also a function of the thickness coordinate due to the through-the-thickness variation of the volume fraction of the fibers. Therefore, the integrals in (34) have to be computed numerically as well.
2.1. Numerical Evaluation of the Fundamental Operators
It is well-known that the integrals in definitions (31) and (32) require a tool to be computed numerically. In the current research, the Gauss–Legendre rule is used. According to this approach, the infinitesimal area
is evaluated in the master element as follows, through the determinant of the Jacobian matrix:
. Consequently, the integral of a generic two-dimensional function
can be written as
At this point, the integral is converted into a weighted linear sum by introducing the roots of Legendre polynomials
and the corresponding weighting coefficients
:
The values of the roots of Legendre polynomials and the corresponding weighting coefficients used in the numerical integration are listed in
Table 1. Recall that the full integration is performed by setting
. On the other hand, the reduced integration is accomplished for
as far as the shear terms are concerned. In other words, the elements of the stiffness matrix which involve the mechanical properties
are computed by means of the reduced integration. This procedure aims to avoid the shear locking problem as highlighted in the book by Reddy [
14]. For the sake of completeness, the roots of Legendre polynomials are also depicted in
Figure 1, for both the full and reduced integrations.
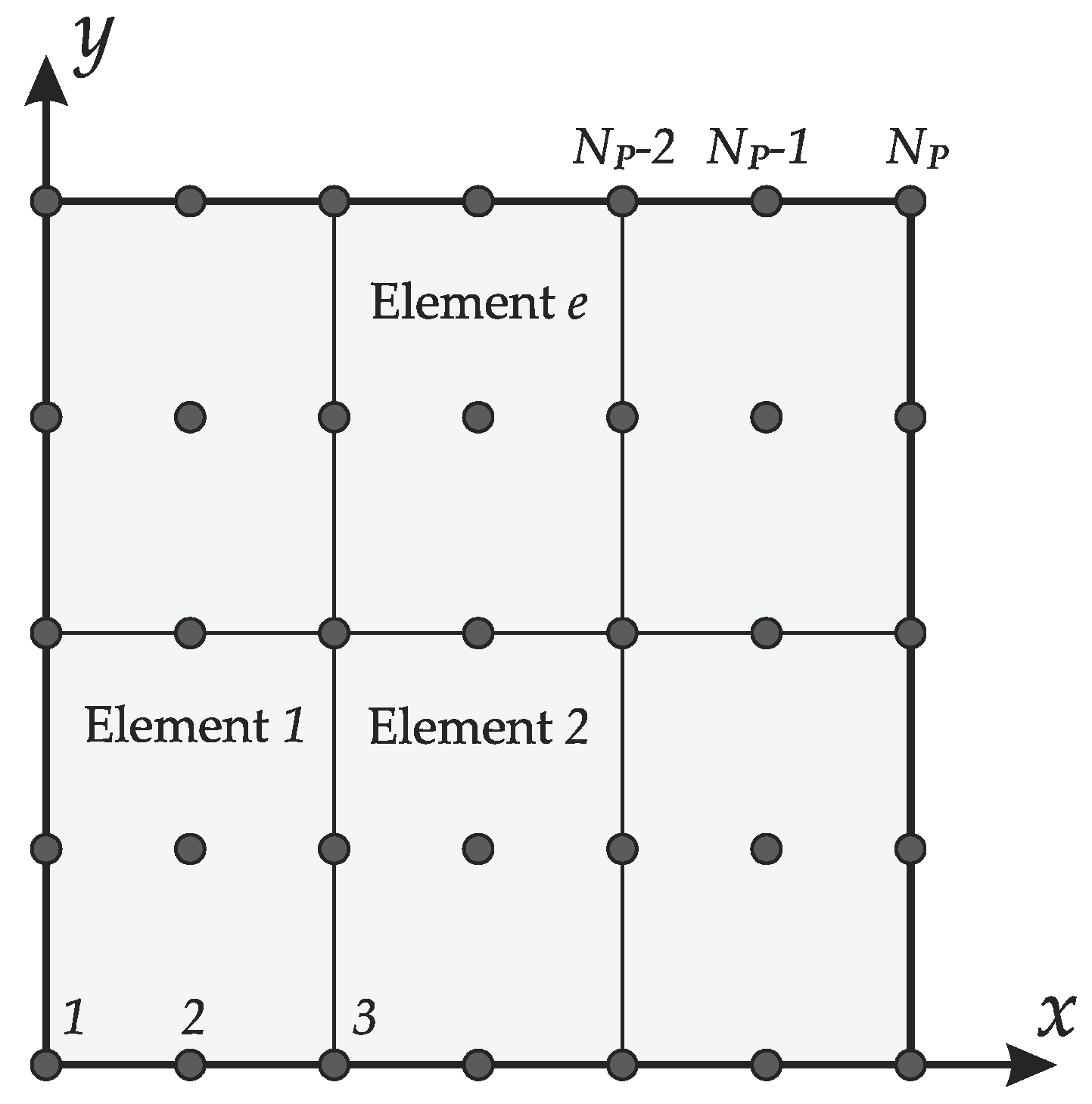
Finally, the assembly procedure is performed to enforce the
compatibility conditions among the elements in which the reference domain is divided. In other words, the model is characterized by continuous displacements at the interfaces of the elements. The global discrete system of governing equations assumes the following aspect:
where the number of degrees of freedom is given by
,
being the number of nodes of the discrete domain. With reference to Equation (38),
clearly stand for the global stiffness and mass matrices, whereas
is the vector of the nodal displacements of the global system defined below:
in which the numbering is performed following the scheme in
Figure 3. Finally,
is the vector that collects the second-order time derivatives of the nodal displacements.
2.2. Natural Frequency Analysis
Once the discrete fundamental system (38) is defined and the proper boundary conditions are enforced, the separation of variables provide the following relation:
in which
represents the circular frequencies of the structural system, whereas the vector
collects the corresponding modal amplitudes. The natural frequencies of the plate can be evaluated as
. It can be observed that the expression (40) is a generalized eigenvalue problem. In the present research, the function “
eigs” embedded in MATLAB was employed to obtain the natural frequencies and the mode shapes of the laminated composite plates.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}