Finite Strain Homogenization Using a Reduced Basis and Efficient Sampling


Abstract
:1. Introduction
1.1. Purpose
1.2. State of the Art
1.3. Main Contributions and Outline
1.4. Notation
1.5. Material Models
1.6. Problem Setting of First Order Homogenization
1.6.1. Macroscopic Problem
1.6.2. Microscopic Problem
2. Reduced Basis Homogenization for Hyperelasticity
2.1. Formulation
2.2. Identification of the Reduced Basis
2.3. Mathematical Motivation of the Reduced Basis Model
2.4. Details on the Coefficient Optimization
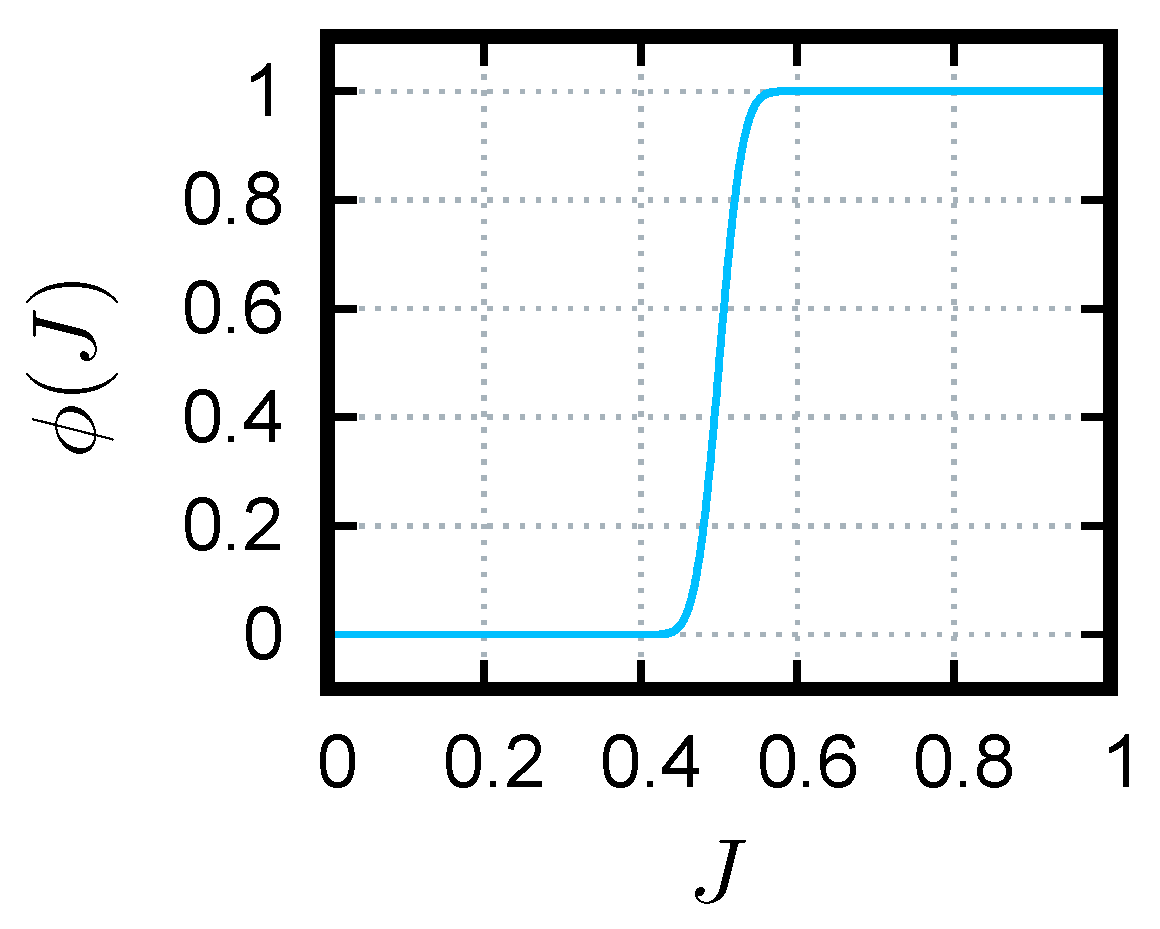
- The RB method is robust with respect to outlier values of the determinant. The modified quadrature rule extends the set of coefficient vectors for which effective quantities can be computed, albeit approximately, to the whole space .
- The significance of local fields varies with the value of the cutoff function. When attains values less than one, information is considered accordingly less reliable. In this sense, microscopic information is filtered based on a trust region for J defined by can be seen as a reliability indicator.
3. Sampling
3.1. General Considerations
- The samples should be densely and homogeneously distributed within the space of all admissible macroscopic kinematic configurations. This is owing to the desire that the POD may extract correlation information from a holistic and unbiased set. In other words, the samples should be as uniformly random as possible within the anticipated query domain of the surrogate.
- The sample number should not exceed a certain limit. Only with this property may the RB be identified within the bounds of available computational resources (e.g., memory and CPU time).
3.2. Large Strain Sampling Strategy
| Algorithm 1: Sampling of the macroscopic stretch tensor. |
| Input : minimum and maximum determinant with maximum deviatoric amplitude number of macroscopic determinants number of deviatoric directions number of deviatoric amplitudes Output: samples of
|
- Step 1.
- Uniform seeding of the determinants is actually not required, but any pattern implying the sampling determinants to be dense in as works without loss of generality. In this way, the dilatational response may be resolved adaptively.
- Step 2.
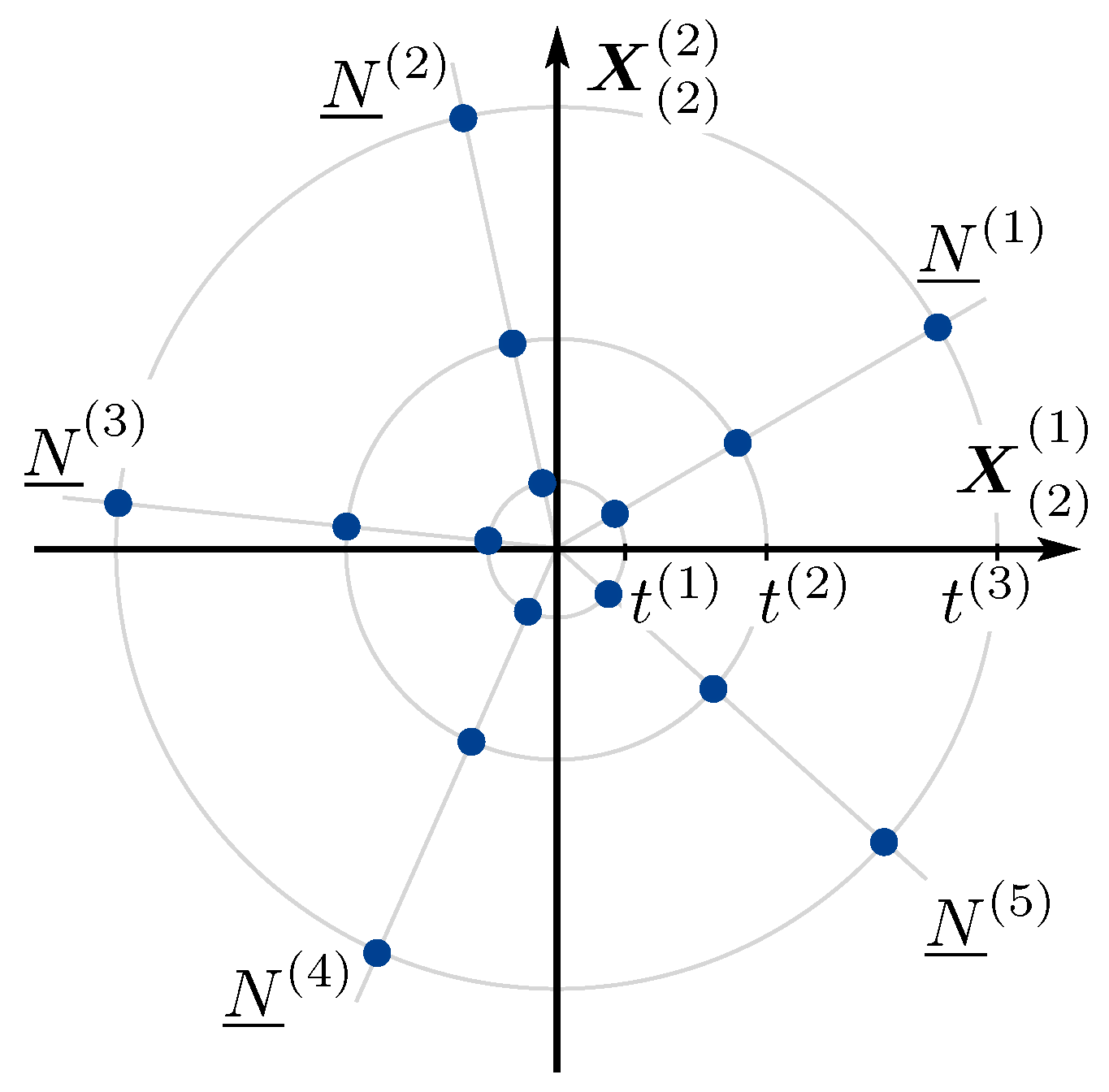
- The generation of uniform point distributions on spheres is a research topic on its own, see [33] for an overview. The method described in [12] is based on energy minimization, which is also used in the present work. Some point sets of various sizes are included in the example program [18]. More detailed investigations on this topic and an open-source code of a point generation program are part of another work, [34]. Alternatively, Equal Area Points [35] may be used as a rough but quickly computable approximation of such point sets.
- Step 3.
- As in Step 1, the uniform placement of the deviatoric amplitudes, , may be substituted by adaptive alternatives. In [12], we have suggested to use an exponential distance function.
3.3. Application of the Stretch Tensor Trained Reduced Basis Model
| Algorithm 2: Online phase of the stretch tensor trained Reduced Basis method |
| Input : macroscopic deformation gradient Output: , effective material response
|
4. Numerical Examples
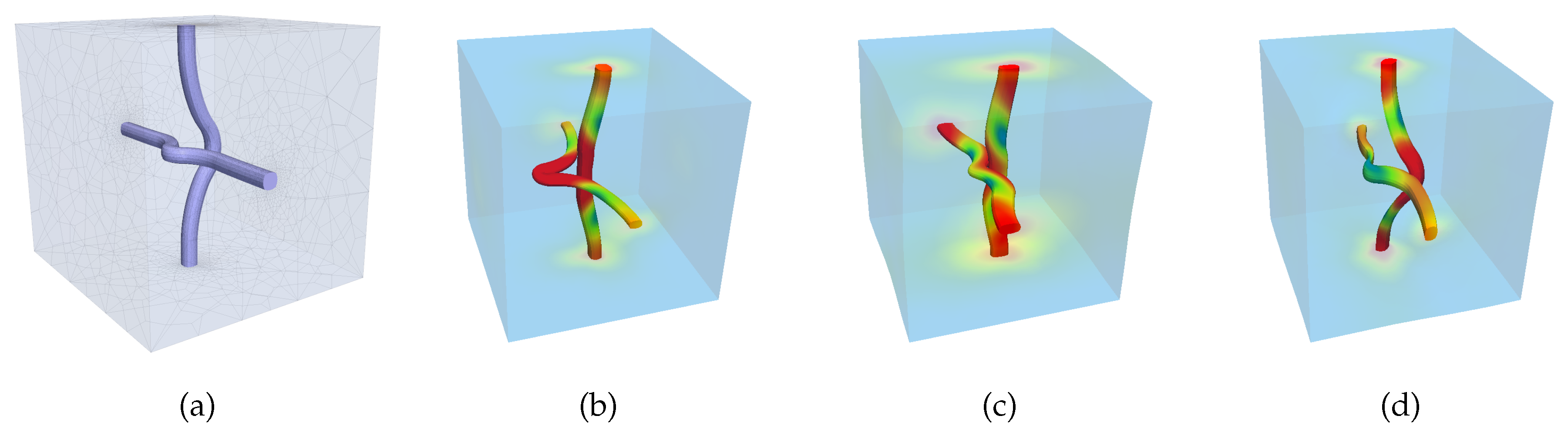
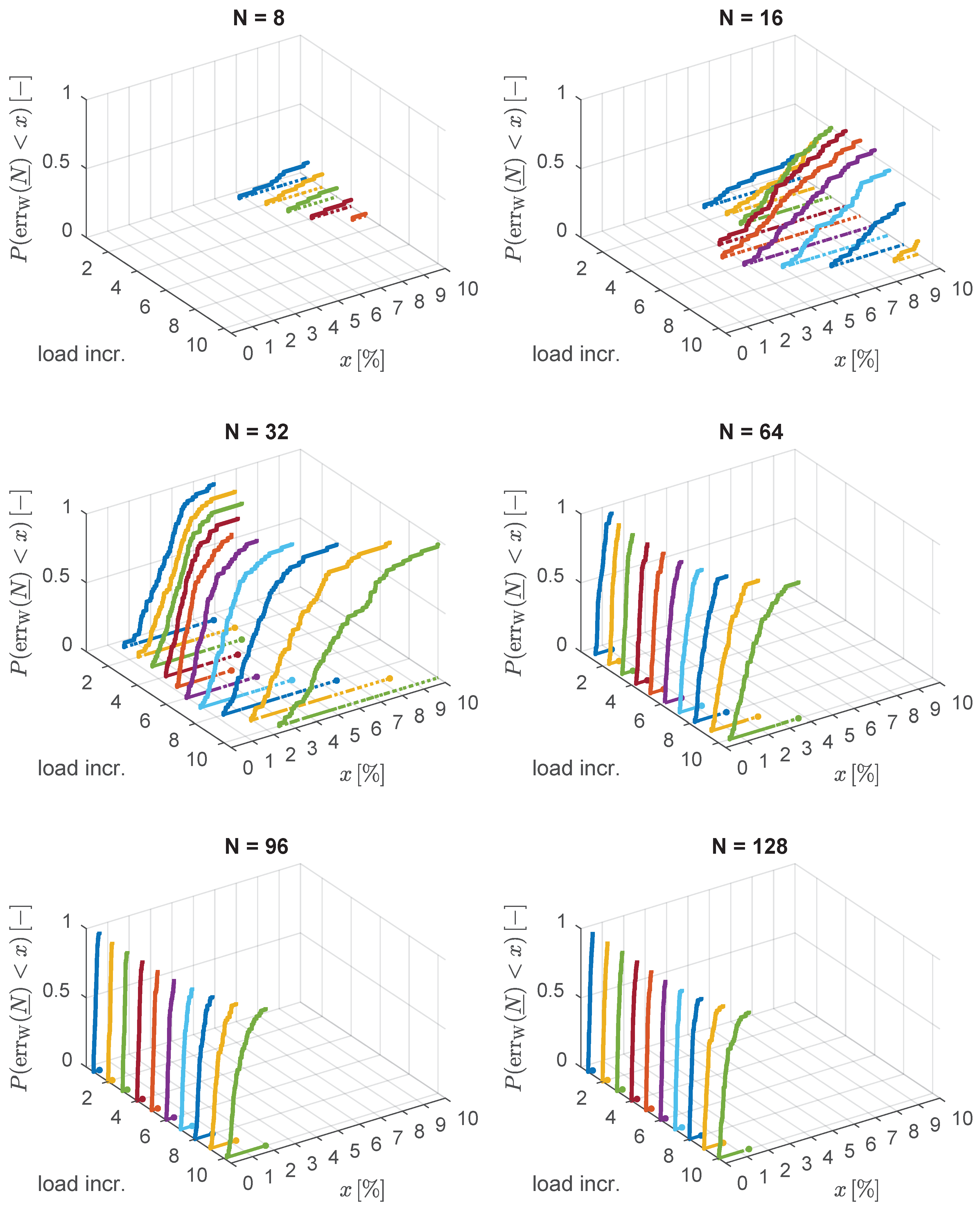
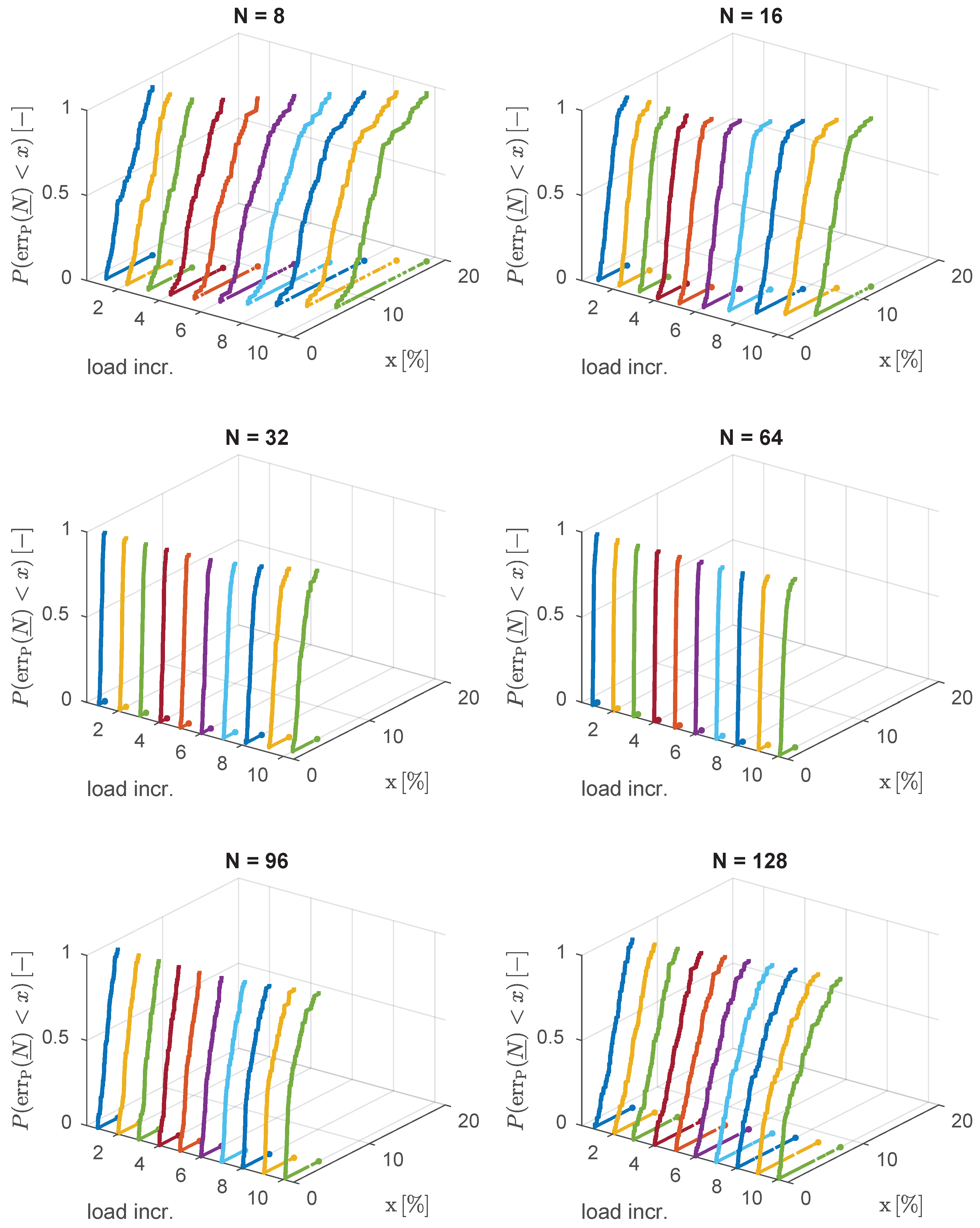
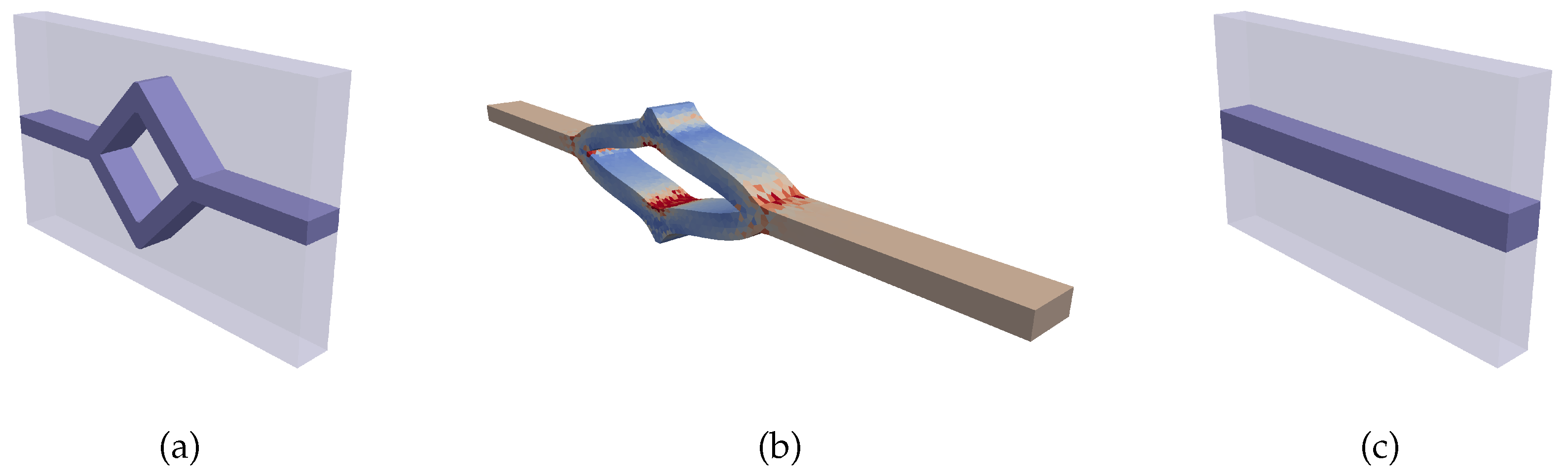
4.1. Reduced Basis for a Fibrous Microstructure
4.2. Reduced Basis for a Stiffening Microstructure
5. Discussion
5.1. Discussion of the Reduced Basis Method
5.1.1. Relation of the RB Homogenization to Analytical Estimates
5.1.2. Reconstruction of Displacement Fields
5.1.3. Relation to Classical Displacement-Based POD Methods
5.1.4. Advantages Compared to General Displacement-Based Schemes
- No gradients need to be computed from displacement fields, which displacement-based schemes always require prior to the evaluation of the material law.
- The residual and the Jacobian are algorithmically sleek and trivial to implement.
- The absence of element formulations in the assembly of the reduced residual and of the Jacobi matrix contributes to both the simplicity and the efficiency of the method—no incidence matrices occur, allowing for linear memory access. Moreover, the algebraic operations associated with reference element formulations are bypassed. This is also in favor of parallel computations. Such an implementation is still outstanding for the problem at hand, but has been conducted for related problems in the small strain setting in [38].
- : Nine values of the stress at the quadrature point
- : Symmetric stiffness tensor
- : F-RB matrix containing the nine values of each basis elements as columns
- : The quadrature weight at
- : Three times the number of nodes,
- : Global FE residual vector
- : u-RB matrix of which the columns contain the nodal displacement values
- : Global FE stiffness matrix
5.1.5. Outlook
5.2. Discussion of the Sampling Strategy
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| RB | Reduced Basis |
| FE(M) | Finite Element (Method) |
| POD | Proper Orthogonal Decomposition |
| DOF | degree(s) of freedom |
| FOM | full-order model |
| s.p.d. | symmetric positive definite |
| DDMS | Dilatational-Deviatoric Multiplicative Split |
Appendix A. Material Objectivity
Appendix B. Effective Material Responses of the RB
Appendix B.1. Effective Stress
Appendix B.2. Effective Stiffness
Appendix C. Basis for Symmetric Traceless Second Order Tensors
References
- Rendek, M.; Lion, A. Amplitude dependence of filler-reinforced rubber: Experiments, constitutive modelling and FEM—Implementation. Int. J. Solids Struct. 2010, 47, 2918–2936. [Google Scholar] [CrossRef]
- Nguyen, V.D.; Lani, F.; Pardoen, T.; Morelle, X.; Noels, L. A large strain hyperelastic viscoelastic-viscoplastic-damage constitutive model based on a multi-mechanism non-local damage continuum for amorphous glassy polymers. Int. J. Solids Struct. 2016, 96, 192–216. [Google Scholar] [CrossRef] [Green Version]
- Barrault, M.; Maday, Y.; Nguyen, N.C.; Patera, A.T. An ‘empirical interpolation’ method: Application to efficient reduced-basis discretization of partial differential equations. C. R. Math. 2004, 339, 667–672. [Google Scholar] [CrossRef]
- Geers, M.; Yvonnet, J. Multiscale modeling of microstructure-property relations. MRS Bull. 2016, 41, 610–616. [Google Scholar] [CrossRef]
- Saeb, S.; Steinmann, P.; Javili, A. Aspects of Computational Homogenization at Finite Deformations: A Unifying Review From Reuss’ to Voigt’s Bound. Appl. Mech. Rev. 2016, 68, 050801. [Google Scholar] [CrossRef]
- Feyel, F. Multiscale FE2 elastoviscoplastic analysis of composite structures. Comput. Mater. Sci. 1999, 16, 344–354. [Google Scholar] [CrossRef]
- Sirovich, L. Turbulence and the Dynamics of Coherent Structures. Part 1: Coherent Structures. Q. Appl. Math. 1987, 45, 561–571. [Google Scholar] [CrossRef]
- Yvonnet, J.; He, Q.C. The reduced model multiscale method (R3M) for the non-linear homogenization of hyperelastic media at finite strains. J. Comput. Phys. 2007, 223, 341–368. [Google Scholar] [CrossRef] [Green Version]
- Radermacher, A.; Reese, S. POD-based model reduction with empirical interpolation applied to nonlinear elasticity. Int. J. Numer. Methods Eng. 2016, 107, 477–495. [Google Scholar] [CrossRef]
- Radermacher, A.; Reese, S. Proper orthogonal decomposition-based model reduction for non-linear biomechanical analysis. Int. J. Mater. Eng. Innov. 2013, 4, 149–165. [Google Scholar] [CrossRef]
- Soldner, D.; Brands, B.; Zabihyan, R.; Steinmann, P.; Mergheim, J. A numerical study of different projection-based model reduction techniques applied to computational homogenisation. Comput. Mech. 2017, 60, 613–625. [Google Scholar] [CrossRef] [Green Version]
- Fritzen, F.; Kunc, O. Two-stage data-driven homogenization for nonlinear solids using a reduced order model. Eur. J. Mech. A Solids 2018, 69, 201–220. [Google Scholar] [CrossRef]
- Akkari, N.; Casenave, F.; Moureau, V. Time Stable Reduced Order Modeling by an Enhanced Reduced Order Basis of the Turbulent and Incompressible 3D Navier–Stokes Equations. Math. Comput. Appl. 2019, 24, 45. [Google Scholar] [CrossRef]
- An, S.; Kim, T.; James, D.L. Optimizing cubature for efficient integration of subspace deformations. ACM Trans. Graph. 2009, 27, 165:1–165:10. [Google Scholar] [CrossRef]
- Hernández, J.; Caicedo, M.; Ferrer, A. Dimensional hyper-reduction of nonlinear finite element models via empirical cubature. Comput. Methods Appl. Mech. Eng. 2017, 313, 687–722. [Google Scholar] [CrossRef] [Green Version]
- Temizer, I.; Zohdi, T. A numerical method for homogenization in non-linear elasticity. Comput. Mech. 2007, 40, 281–298. [Google Scholar] [CrossRef]
- Yvonnet, J.; Monteiro, E.; He, Q.C. Computational homogenization method and reduced database model for hyperelastic heterogeneous structures. J. Multiscale Comput. Eng. 2013, 11, 201–225. [Google Scholar] [CrossRef]
- Kunc, O. GitHub repository ReducedBasisDemonstrator. Available online: https://github.com/EMMA-Group/ReducedBasisDemonstrator (accessed on 27 May 2019).
- Flory, P. Thermodynamic relations for high elastic materials. Trans. Faraday Soc. 1961, 57, 829–838. [Google Scholar] [CrossRef]
- Bilger, N.; Auslender, F.; Bornert, M.; Michel, J.C.; Moulinec, H.; Suquet, P.; Zaoui, A. Effect of a nonuniform distribution of voids on the plastic response of voided materials: a computational and statistical analysis. Int. J. Solids Struct. 2005, 42, 517–538. [Google Scholar] [CrossRef] [Green Version]
- Doll, S.; Schweizerhof, K. On the Development of Volumetric Strain Energy Functions. J. Appl. Mech. 1999, 67, 17–21. [Google Scholar] [CrossRef] [Green Version]
- Simo, J. A framework for finite strain elastoplasticity based on maximum plastic dissipation and the multiplicative decomposition: Part I. Continuum formulation. Comput. Methods Appl. Mech. Eng. 1988, 66, 199–219. [Google Scholar] [CrossRef]
- Pruchnicki, E. Hyperelastic homogenized law for reinforced elastomer at finite strain with edge effects. Acta Mech. 1998, 129, 139–162. [Google Scholar] [CrossRef]
- Miehe, C. Computational micro-to-macro transitions for discretized micro-structures of heterogeneous materials at finite strains based on the minimization of averaged incremental energy. Comput. Methods Appl. Mech. Eng. 2003, 192, 559–591. [Google Scholar] [CrossRef]
- Castañeda, P.P.; Suquet, P. Nonlinear Composites. Adv. Appl. Mech. 1998, 34, 172–302. [Google Scholar] [CrossRef]
- Kabel, M.; Böhlke, T.; Schneider, M. Efficient fixed point and Newton–Krylov solvers for FFT-based homogenization of elasticity at large deformations. Comput. Mech. 2014, 54, 1497–1514. [Google Scholar] [CrossRef]
- Quarteroni, A.; Manzoni, A.; Negri, F. Reduced Basis Methods for Partial Differential Equations: An Introduction; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Ball, J.M. Convexity conditions and existence theorems in nonlinear elasticity. Arch. Ration. Mech. Anal. 1976, 63, 337–403. [Google Scholar] [CrossRef]
- Schneider, M. Beyond polyconvexity: An existence result for a class of quasiconvex hyperelastic materials. Math. Methods Appl. Sci. 2017, 40, 2084–2089. [Google Scholar] [CrossRef]
- Miehe, C. Numerical computation of algorithmic (consistent) tangent moduli in large-strain computational inelasticity. Comput. Methods Appl. Mech. Eng. 1996, 134, 223–240. [Google Scholar] [CrossRef]
- Faraut, J. Analysis on Lie Groups: An Introduction; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]
- Neff, P.; Eidel, B.; Martin, R.J. Geometry of Logarithmic Strain Measures in Solid Mechanics. Arch. Ration. Mech. Anal. 2016, 222, 507–572. [Google Scholar] [CrossRef] [Green Version]
- Brauchart, J.S.; Grabner, P.J. Distributing many points on spheres: Minimal energy and designs. J. Complex. 2015, 31, 293–326. [Google Scholar] [CrossRef] [Green Version]
- Kunc, O.; Fritzen, F. Generation of energy-minimizing point sets on spheres and their application in mesh-free interpolation and differentiation. Adv. Comput. Math. 2018. Under review. [Google Scholar]
- Leopardi, P. A partition of the unit sphere into regions of equal area and small diameter. Electron. Trans. Numer. Anal. 2006, 25, 309–327. [Google Scholar]
- Kim, H.J.; Swan, C.C. Algorithms for automated meshing and unit cell analysis of periodic composites with hierarchical tri-quadratic tetrahedral elements. Int. J. Numer. Methods Eng. 2003, 58, 1683–1711. [Google Scholar] [CrossRef]
- Voigt, W. Lehrbuch der Kristallphysik; Vieweg+Teubner Verlag: Wiesbaden, Germany, 1966. [Google Scholar]
- Fritzen, F.; Hodapp, M. The finite element square reduced (FE2R) method with GPU acceleration: Towards three-dimensional two-scale simulations. Int. J. Numer. Methods Eng. 2016, 107, 853–881. [Google Scholar] [CrossRef]
- Rambausek, M.; Göküzüm, F.S.; Nguyen, L.T.K.; Keip, M.A. A two-scale FE-FFT approach to nonlinear magneto-elasticity. Int. J. Numer. Methods Eng. 2019, 117, 1117–1142. [Google Scholar] [CrossRef]
- Kochmann, J.; Wulfinghoff, S.; Ehle, L.; Mayer, J.; Svendsen, B.; Reese, S. Efficient and accurate two-scale FE-FFT-based prediction of the effective material behavior of elasto-viscoplastic polycrystals. Comput. Mech. 2017. [Google Scholar] [CrossRef]
- Ryckelynck, D. A priori hyperreduction method: an adaptive approach. J. Comput. Phys. 2005, 202, 346–366. [Google Scholar] [CrossRef] [Green Version]
- Himpe, C.; Leibner, T.; Rave, S. Hierarchical Approximate Proper Orthogonal Decomposition. SIAM J. Sci. Comput. 2018, 40, A3267–A3292. [Google Scholar] [CrossRef] [Green Version]
- Bertram, A. Elasticity and Plasticity of Large Deformations; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RB Method | Quantity | Complexity |
|---|---|---|
| F-based | ||
| u-based | + assembly of | |
| + assembly of |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kunc, O.; Fritzen, F. Finite Strain Homogenization Using a Reduced Basis and Efficient Sampling. Math. Comput. Appl. 2019, 24, 56. https://doi.org/10.3390/mca24020056
Kunc O, Fritzen F. Finite Strain Homogenization Using a Reduced Basis and Efficient Sampling. Mathematical and Computational Applications. 2019; 24(2):56. https://doi.org/10.3390/mca24020056
Chicago/Turabian StyleKunc, Oliver, and Felix Fritzen. 2019. "Finite Strain Homogenization Using a Reduced Basis and Efficient Sampling" Mathematical and Computational Applications 24, no. 2: 56. https://doi.org/10.3390/mca24020056
APA StyleKunc, O., & Fritzen, F. (2019). Finite Strain Homogenization Using a Reduced Basis and Efficient Sampling. Mathematical and Computational Applications, 24(2), 56. https://doi.org/10.3390/mca24020056