1. Introduction
Finding eigenfunctions of differential problems can be a hard task, at least for some classical problems. Among others, we can find literature in Sturm–Liouville problems, in Mathieu problems or in Orr–Sommerfeld problems describing the difficulties involved in the resolution of those problems [
1,
2,
3,
4,
5,
6,
7,
8]. The first difficulty consists of finding accurate numerical approximations for the respective eigenvalues.
In this work, we present a procedure based on the Ortiz and Samara’s operational approach to the Tau method described in [
9], where the differential problem is translated into an algebraic problem. This is achieved using the called operational matrices that represent the action of differential operators in a function. We have deduced explicit formulae for the elements of these matrices [
10,
11] obtained by performing operations on the bases of orthogonal polynomials and, for some families, we have exact formulae, which enables the construction of very accurate operational matrices. The Tau method has already been used for these kinds of problems [
5,
9,
12,
13]; however, our work on matrix calculation formulas adds efficiency and precision to the method.
Our main purpose is to use the Tau Toolbox, a Matlab numerical library that is being developed by our research group [
14,
15,
16]. This library allows a stable implementation of the Tau method for the construction of accurate approximate solutions for integro-differential problems. In particular, the construction of the operational matrices is done automatically. These facts led us to think that the Tau Toolbox seems to be useful for these kinds of problems.
Finally, operating with symbolic variables, we define the determinant of those matrices as polynomials and use its roots as eigenvalues’ approximations.
We present some examples showing that, using this technique in the Tau Toolbox, we are able to obtain results comparable with those reported in the literature and sometimes even better.
2. The Tau Method
Let
be an order
differential operator, where
and
are some function spaces, and let
be
functionals representing boundary conditions, so that
is a well posed differential problem.
2.1. The Tau Method Principle
A particular implementation of the Tau method depends on the choice of an orthogonal basis for
. A sequence of orthogonal polynomials
with respect to the weight function
on a given interval of orthogonality
satisfies
where
and
is the Kronecker delta [
17].
Let
be the space of algebraic polynomials of any degree and let us suppose that
is dense in
; then, the solution
y of (
1) has a series representation
. A polynomial approximation of degree
is achieved by
where
and
.
In the Tau method sense,
is a polynomial satisfying the boundary conditions in (
1) and solving the differential equation with a residual
of maximal order. Thus, the differential problem is reduced to an algebraic one of finding the
n coefficients
in (
2) such that
and so the residual
.
2.2. Operational Formulation
For a given
, we define the matrix
and the vector
If, in problem (
1), the differential operator
is linear and the
are
linear functionals, then problem (
3) can be put in matrix form as
The matrix , called the Tau matrix, can be evaluated from operational matrices, that is, matrices translating into coefficients vectors the action of a differential operator in a function y.
Proposition 1. Let be an orthogonal polynomial basis, and infinite matrices such thatThen, for each , Proof. For
, the result is true by hypothesis. Now, supposing that (
5) is true for a
, then
and
ending the proof by induction. □
The following result generalizes the algebraic representation from the previous proposition to differential operators.
Corollary 1. Let be a linear differential operator with polynomial coefficientsand let . If , then withwhere when , and denotes the main block of the matrix with . In [
9], the authors discussed the application of this operational formulation of the Tau method to the numerical approximation of eigenvalues defined by differential equations. They proved that, for a differential eigenvalue problem, where in (
1)
and
is a parameter, the zeros of
approach the eigenvalues of (
1).
2.3. Tau Matrices’ Properties
Given that we are dealing with a general orthogonal polynomial basis, instead of particular cases like Chebyshev or Legendre, we can only make assumptions about general properties of Tau matrices . Anyway, we can’t expect to have symmetric matrices and, in general, they can be considered sparse but with a low level of sparsity.
Since in Proposition 1 is an orthogonal basis, then is the tridiagonal matrix with the coefficients of its three term recurrence relation. Therefore, for problems with polynomial coefficients, matrices of Corollary 1 are banded matrices, with all non-zero elements between the diagonals.
Matrices
are always strictly upper triangular and so
are
upper Hessenberg matrices. The resulting
block of
defined in (
4) is a general
h upper Hessenberg matrix.
Moreover, one advantage of the Tau method is its ability to deal with boundary conditions, allowing the treatment of any linear combination of values of
y and of its derivatives for
in (
1). Thus, the
block
in
is usually dense, with its entries
, made by linear combinations of orthogonal polynomial values
and of its derivatives
, in prescribed abscissas
.
Assembling those blocks and in , we get an upper Hessenberg matrix.
For some problems, whose dependence on the eigenvalues
is verified only in the differential equation, we can use Schur complements to reduce matrix sizes. Considering matrix
in (
4) partitioned as
where
is
and the other blocks are partitioned accordingly. If
is non-singular, then
and the problem is reduced to solve
reducing to
the problem dimension. In the worst case, when
is singular, we have to work with the
matrix
.
In the following sections, we illustrate the application of the Tau method to approximate eigenvalues in some classical problems.
3. Problems with Polynomial Coefficients
Sturm–Liouville problems arise from vibration problems in continuum mechanics. The general form of a fourth order Sturm–Liouville equation is
with appropriate initial and boundary conditions, where
,
, and
are given piecewise continuous functions, with
and
. These conditions mean that (
8) has an infinite sequence of real eigenvalues, bounded from above, and each one has multiplicity of at most 2 [
1].
If
p and
q are differentiable functions, it is an elementary task to give (
8) the form
From this equation, we derive the operational matrix for the general form of the fourth order Sturm–Liouville differential operator associated with (
8)
Assuming that coefficients
, and
are polynomials, or convenient polynomial approximations of the coefficient functions, then the height of this differential operator is well defined as
where
is the polynomial degree. One consequence of Corollary 1 is that to evaluate the block
in (
4) we have to apply (
9) with
and
truncated to its first
lines and columns.
The Tau matrix of a fourth order Sturm–Liouville problem is the matrix , where is the matrix representing boundary conditions and is the first main block of .
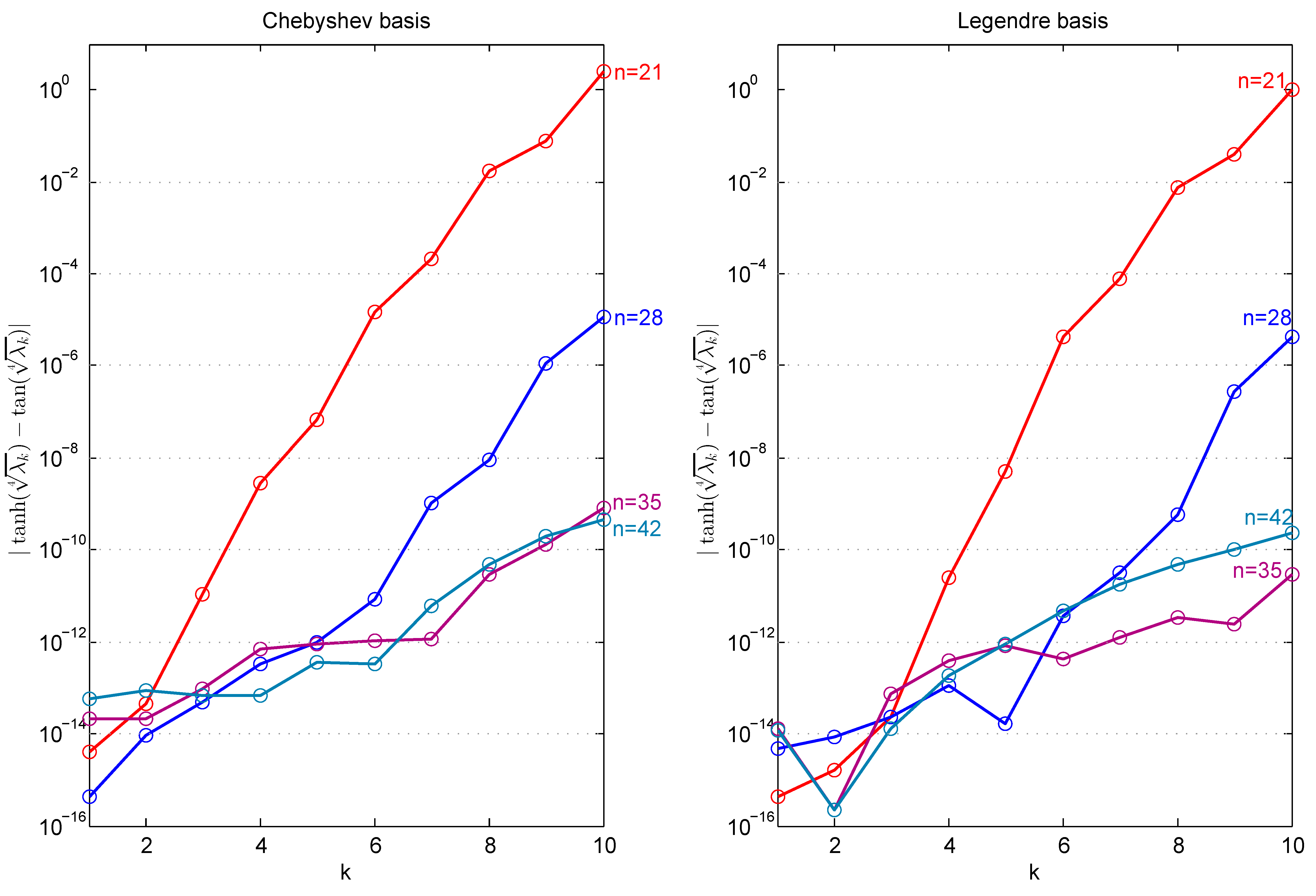
Example 1. Consider the Sturm–Liouville boundary value problemwhose exact eigenvalues satisfy [1,2] In that case , where I is the identity matrix, and the boundary conditions can be represented by , where and are length n line vectors with the polynomial base values in the boundary domain.
For each
,
in (
7) is an
square matrix and its determinant an
degree polynomial. We use the Matlab function
roots to find its zeros and we inspect their accuracy by testing if they satisfy relation (
11).
In
Figure 1, we present
for
the first 10 eigenvalues approximations obtained with
and
, with Chebyshev and Legendre bases shifted to
.
Example 2. A very similar problem, presented as the clamped rod problem in [12,18], is In that case, and whenever we have a symmetric problem and a symmetric base, the matrix
in (
7) has zeros intercalating all non-zero elements. We can reduce the problem dimension, defining two matrices
and
with respectively the odd and the even entries of
, then
. In that case, since
is an 4-upper Hessenberg matrix,
and
are 2-upper Hessenberg matrices. The sparsity pattern of those two matrices, in Legendre basis and with
, are showed in
Figure 2.
The first 14 eigenvalues, evaluated with an
matrix, are presented in [
12]. In
Table 1, we compare those values with our results in the Legendre basis and with
and
. We present values of
, which allows us to verify that our estimates satisfy the property that the
kth eigenvalue is proportional to
[
18].
Example 3. Consider the following Sturm–Liouville problem with non-null q and r coefficientswith constants . The operational matrix (
9) for this case is
and
, with the same
and
vectors of the previous example.
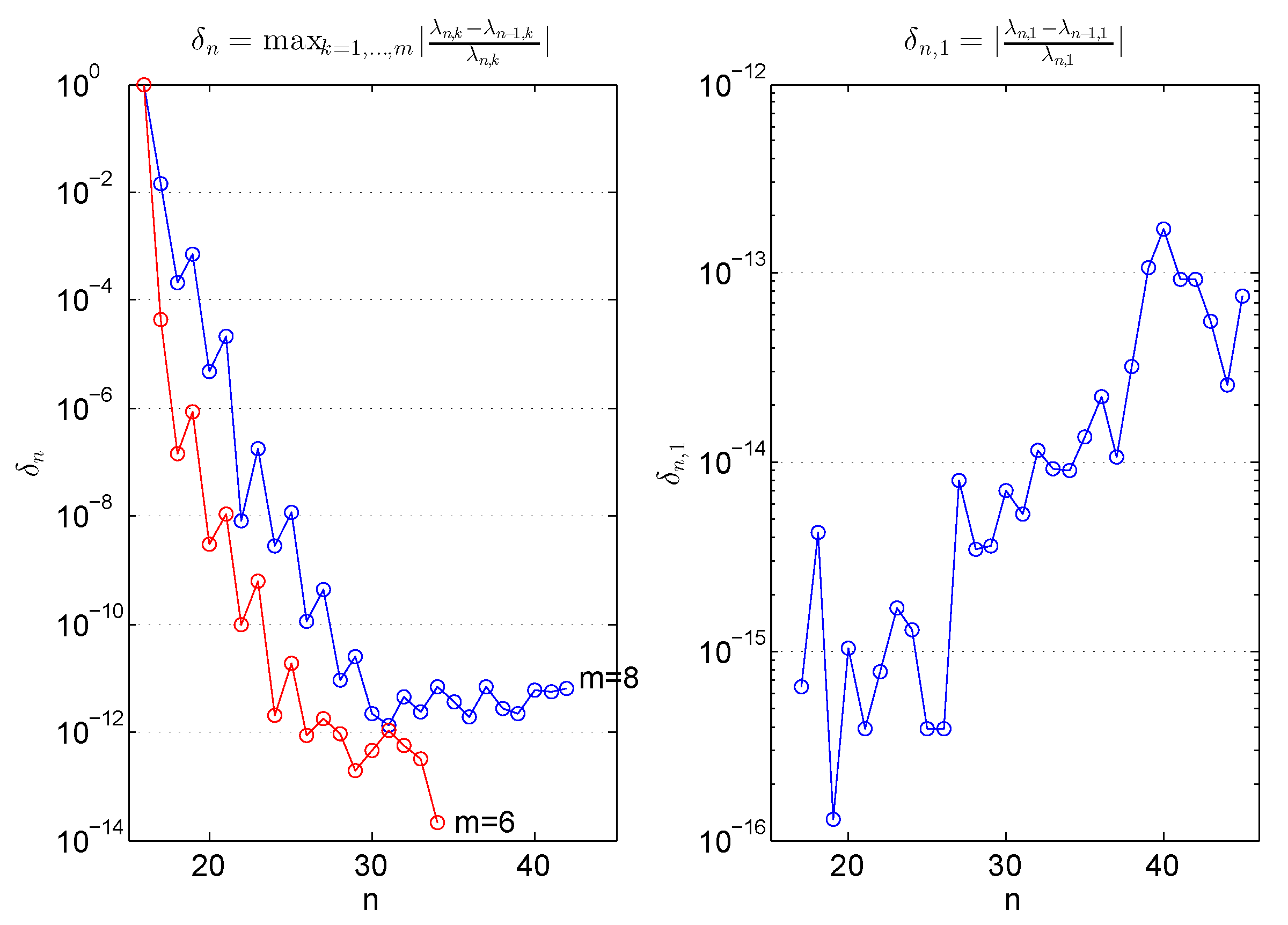
If
is the
kth root of
, and considering
as an estimative of the relative error in
, then
is an estimative of the maximum relative error in the first
m eigenvalues of the problem. In
Figure 3 left, we present
, with
and with
for Example 3 with
and
for
. In
Figure 3 right, the absolute relative error
in the lowest eigenvalue is presented for the same
n values.
In
Table 2, we compare our results with those of [
2] for the first six eigenvalues, and of [
8] for the first 4, obtained with values
and
.
Example 4. Now, we consider the Orr–Sommerfeld problemwith fixed constants and function U. The particular case
is the Poiseuille flow and, with
and
was treated in [
3,
4,
5,
12]. The operational matrix in that case is
Like in Example 2, this is an upper Hessenberg matrix with zeros intercalating its non-zero elements and we can reduce the problem dimension, splitting in two matrices the Schur complement
of the resulting Tau matrix
. Choosing Chebyshev basis, this is the operational version of the Tau procedure of [
5], where the author was confined to eigenvalues associated with symmetric eigenfunctions, which is equivalent to finding the eigenvalues of
.
In [
5], the author obtained for
as an 8 decimal places exact value for the most unstable mode of this problem. Working with double-precision arithmetic, we obtain
. This value results with
that is an
matrix
, the same dimension used in [
5].
In addition, with
, the smallest value of
R for which an unstable eigenmode exists [
5], and
, we get the results presented in
Table 3, together with those of [
5].
4. Non-Polynomial Coefficients
In the previous section, we solved problems in the conditions of Corollary 1, i.e., with differential operators acting in polynomial spaces. In a more general situation, if some of the coefficients
in (
6) are non-polynomial functions, then the corresponding matrices
are functions of
instead of polynomial expressions.
If a non-polynomial function
in (
6) can be defined implicitly by a differential problem, with polynomial coefficients, then we can first of all use the Tau method to find a polynomial approximation
to
and use
to approximate the matrix
.
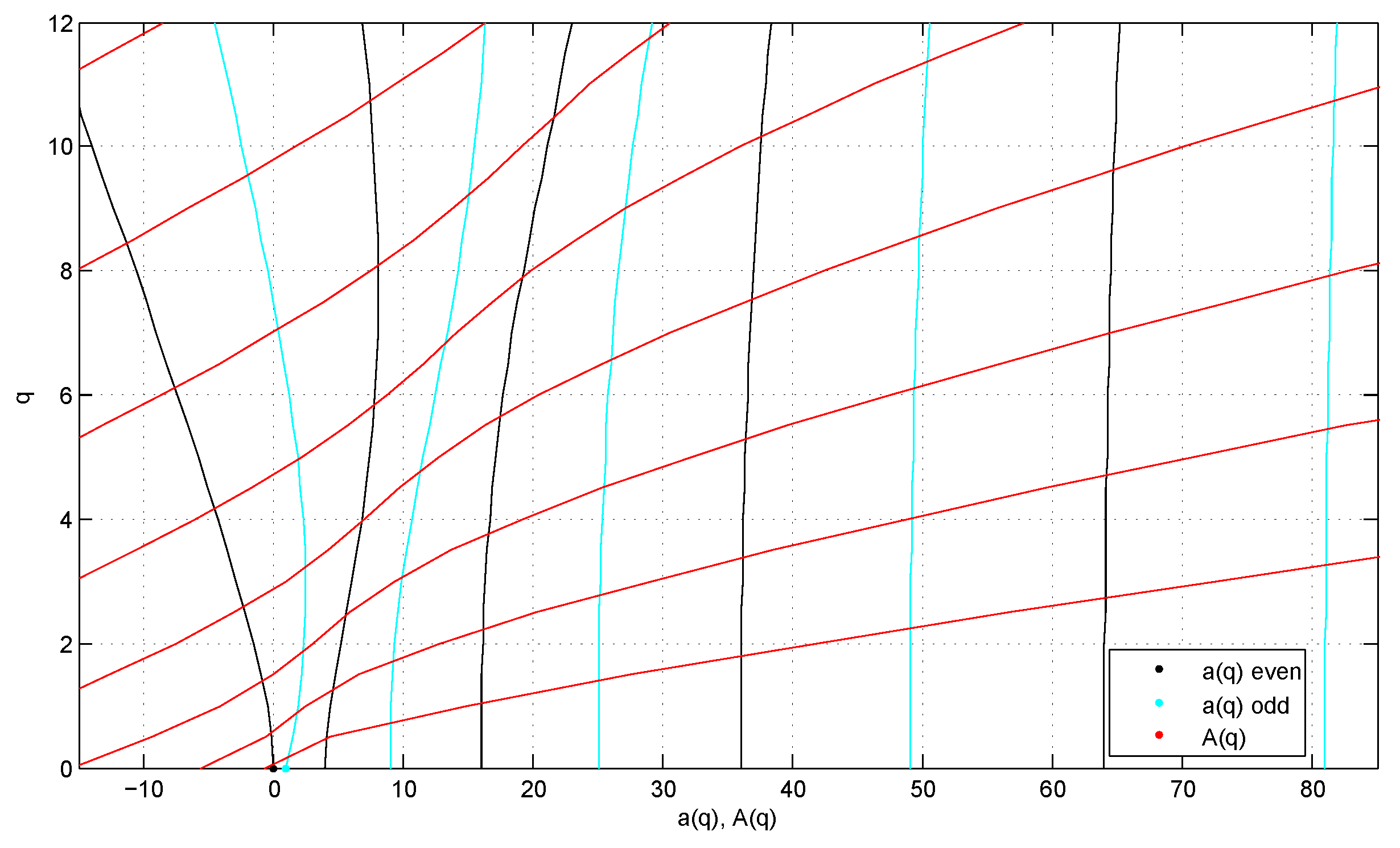
Example 5. Mathieu’s equation appears related to wave equations in elliptic cylinders [19]. For an arbitrary parameter q, the problem is to find the values of λ for which non-trivial solutions ofexist with prescribed boundary conditions. It can be shown that there exists a countably infinite set of eigenvalues
associated with even periodic eigenfunctions and a countably infinite set of eigenvalues
associated with odd periodic eigenfunctions [
19]. We are interested in reproducing some of those values given in there.
The operational matrix for problem (
15) is
Our first step to approximate Mathieu’s eigenvalues is to approximate matrix
. This can be done by, firstly, considering the function
as the solution of a differential problem, using Tau method to get a polynomial approximation
. In a second step, the operational matrix
is approximated by
and, finally, the last step consists in building the Tau matrix
and evaluating the zeros of its determinant.
We take integer values and boundary conditions to get for even r, for odd r, and to get for odd r and for even r.
In
Figure 4, we show Mathieu eigenvalues
and
. Values were obtained with a 18th degree polynomial approximation
and a
Tau matrix
in Chebyshev polynomials.
We can observe, as pointed out in [
19], that, for a fixed
, we have
and that
approach
as
q approaches zero.
Example 6. Mathieu’s equation also appears coupled with a modified Mathieu’s equation in systems of differential equations as multi parameter eigenvalues problems. The particular caseis studied in [6,7] associated with the eigenfrequencies of an elliptic membrane with semi axes and . To approximate eigenvalues for this problem, we first have to approximate
and
by polynomials. Considering, as in the previous example,
the 16th degree Tau solution of
and
as the same degree Tau solution of
then
and
are matrices approximating the operational matrices associated with differential equations (
16).
For each fixed
q, we define matrices Tau
and
, representing Mathieu and modified Mathieu equations, respectively. Defining
the nth eigenvalue of
, in ascending order, and
the mth eigenvalue of
, in descending order, in [
6], it was proved that
and
are analytical functions of
q. Moreover, for each pair
, it was proved the existence and uniqueness of an intersection point of curves
and
. Those intersections identify the eigenmodes of the elliptic membrane.
In
Figure 5, we recover, and extend, figures presented in [
6] and in [
7]. Intersection points of
, the almost vertical curves, and
, the oblique curves, are the eigenpairs
of (
16).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}