To validate the mathematical approach of prediction of pulsating torque components proposed in this paper, several multiphase induction machine topologies were inspected. Transient F-E simulations (Maxwell 2D software) are done to determine the steady-state torque temporal variation. The simulations are done by imposing sinusoidal stator currents.
5.1. Three-Phase Induction Machine
Table 3 shows the imposed parameters in this simulation.
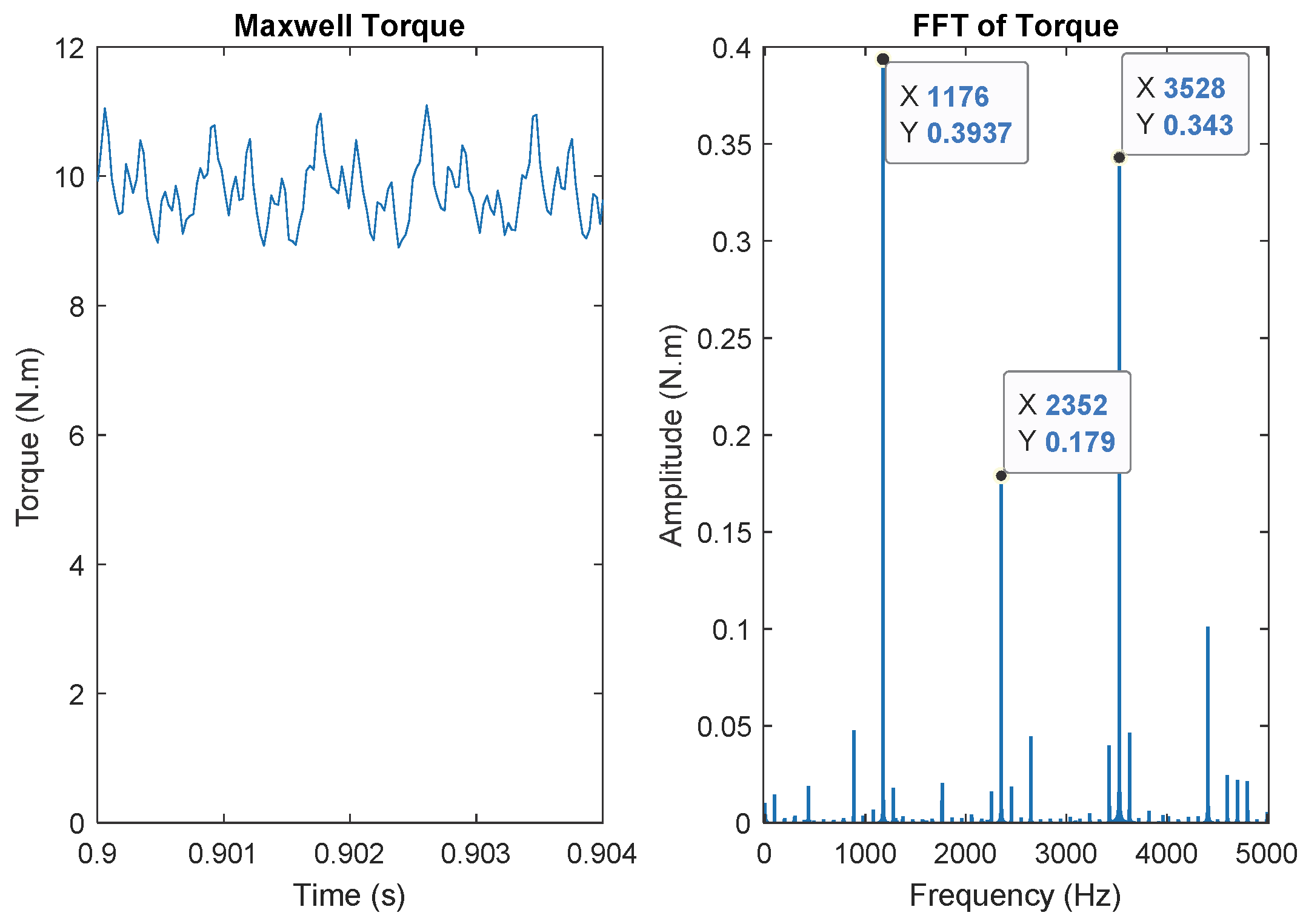
The simulated machine has a 36 stator slots, two investigated numbers of rotor bars 48 and 49, and two pole-pairs. The torque variation is extracted from the simulation results (for the machine with 48 bars), and a harmonic analysis is done and shown in
Figure 3.
As we can see in
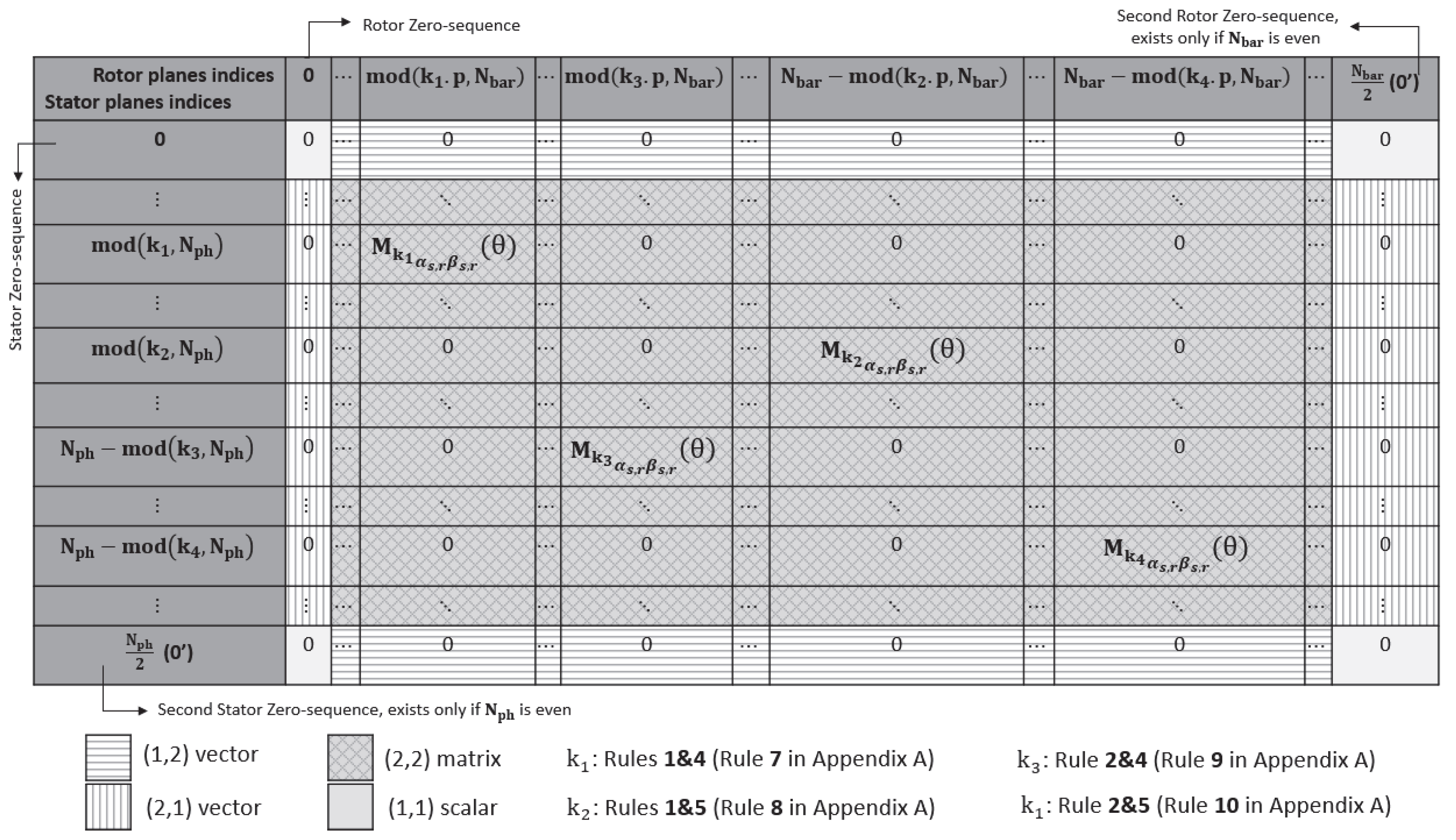
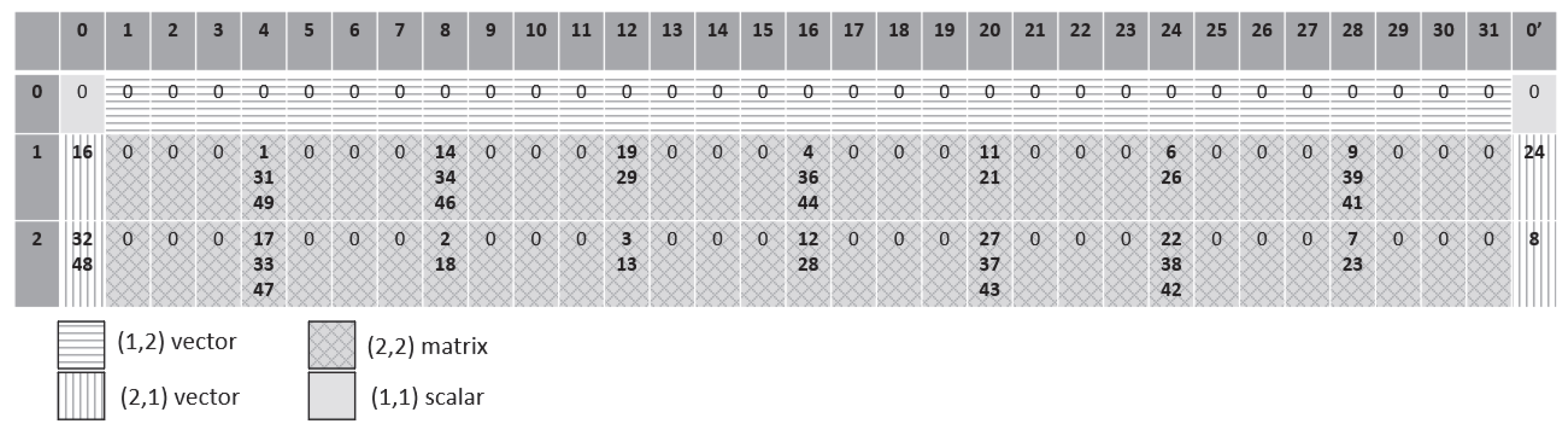
Figure 3, there are three predominant pulsating frequencies (1176 Hz, 2352 Hz and 3528 Hz). To understand the origin of these frequencies, it is important to determine the interactions between space and time harmonics. The distribution of space harmonics (up to v = 50) in the matrix
, according to
Figure 2, is shown in
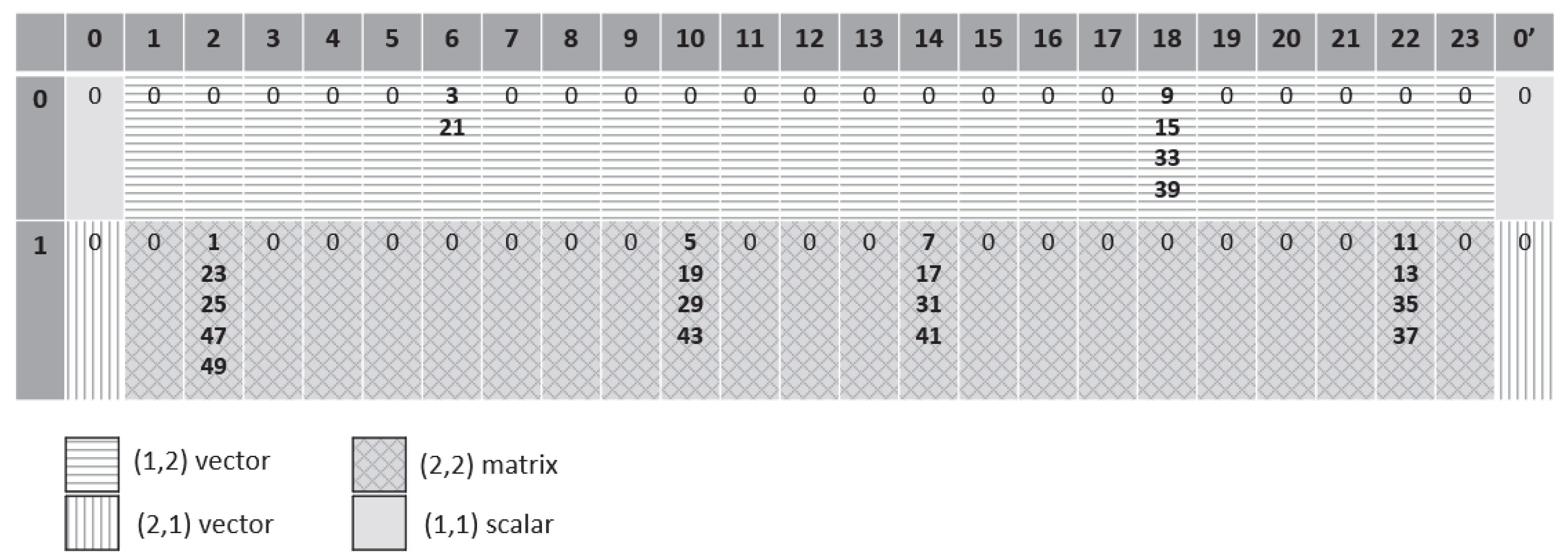
Figure 4. To simplify the presentation, each space harmonic “v.p” is represented by the number “v” in Figure (v = 1, …, 50).
All the even order harmonics are null, according to the winding distribution, so only odd order harmonics appear in the matrix.
The first line (0) in the table corresponds to the stator zero-sequence. For this zero-sequence, the harmonics 3 and 21 can excite the plane n°6 of the rotor and the harmonics 9, 15, 33 and 39 can excite the plane n°18 of the rotor. With a wye-connected three-phase machine, the zero-sequence is not excited. As consequence the plane n°6 and n°18 are not excited.
The second line (1) corresponds to the only possible stator plane in the case of this three-phase machine, which can be excited be sequences “u = 1” or “u = 2”. For this stator plane, four different rotor planes are excited (n°2, n°10, n°14, n°22), each one of them contains several superposed harmonics. As example the rotor plane n°2 is excited by the space harmonics n°1, 23, 25, 47 and 49.
In
Figure 4, the number of bars is even, so a second rotor zero-sequence appears in
column 0’.
According to the Equations (20), (27) and
Table A1 in
Appendix B, the frequencies of pulsating torque components can be predicted (shown in
Table 4).
In this table, we find the same three predominant frequencies in
Figure 3, which are 1176, 2352 and 3528 Hz. Each frequency results from many interactions between space and time harmonics. For example, the frequency 1176 Hz (the highest torque pulsation) results from the interactions: 1p-23p, 1p-25p, 25p-49p, 5p-19p, 5p-29p, 19p-43p, 7p-17p, 7p-31p, 17p-41p, 11p-13p, 11p-35p and 13p-37p.
According to the
Table A3 in
Appendix C, the 10 most important space harmonics (excited by the sequence “u = 1”) regarding their amplitudes in the winding function are: v = 1, 5, 7, 11, 13, 17, 19, 23, 35, 37. An interaction between two of these harmonics is considered important regarding the amplitude of torque pulsation. These significant interactions are colored in gray in the
Table 4. We observe that most of these colored interactions generate a pulsation at 1176 Hz, which is consistent with F-E results (
Figure 3), where the highest amplitude of torque ripple is at 1176 Hz.
Basing on
Figure 3, this machine with 48 bars, presents many superpositions between space harmonics (in the same rotor planes). All these harmonics interactions can be avoided by taking 49 bars instead of 48.
Figure 5 shows how the choice of 49 bars improves the separation between harmonics, all the harmonics below v = 50 are perfectly separated.
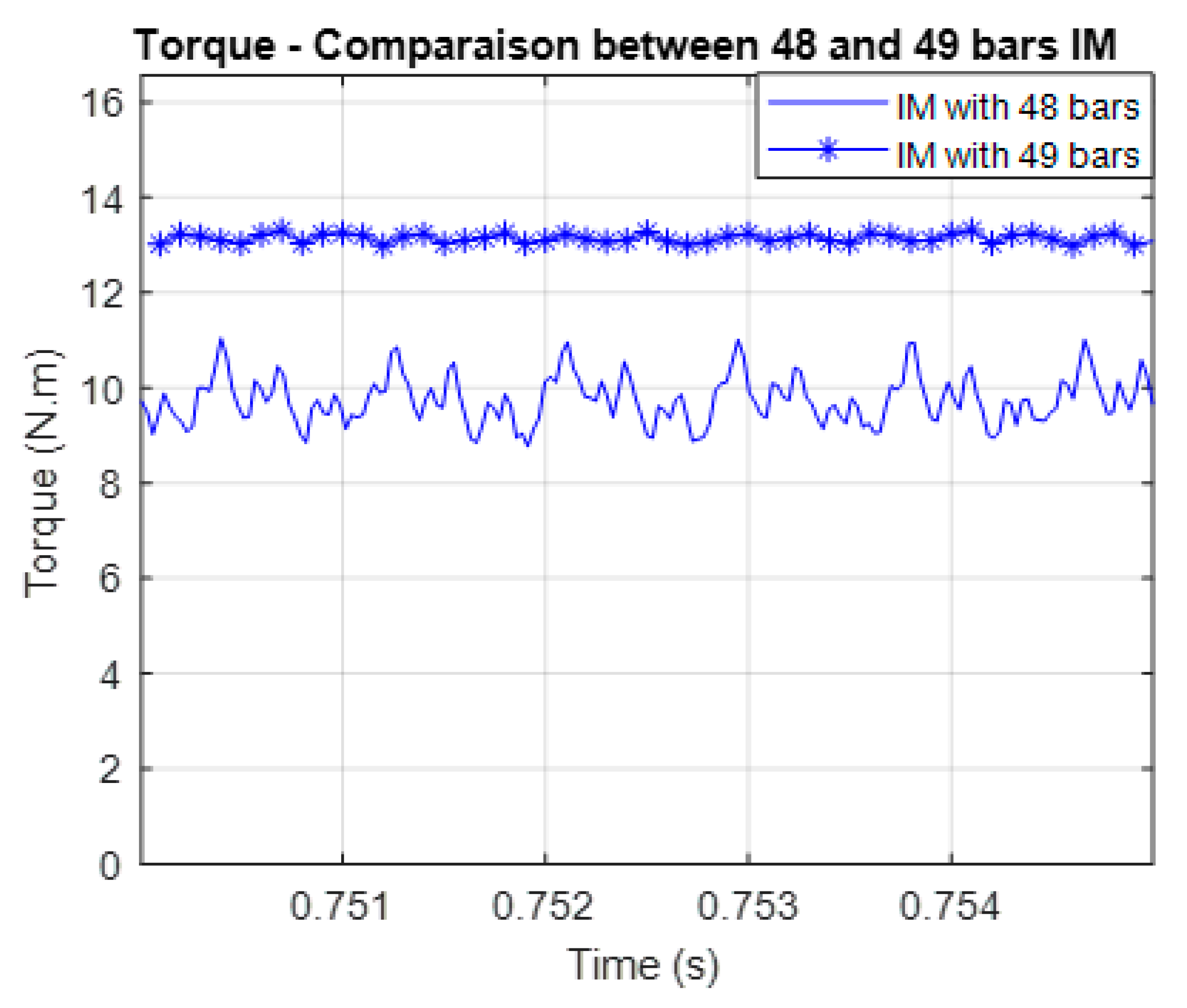
The
Figure 6 shows the comparison between the three-phase IM with 48 and 49 bars regarding the torque (F-E results). It proves that the torque is smoother with 49 bars thanks to the good separation between space harmonics into several α-β rotor planes (as shown in
Figure 5).
This result is consistent with the rules related to the choice of rotor bars number described in the reference [
2] (pp. 340–341). According to this reference, for this machine topology (three phases, 36 stator slots and two pole-pairs), the number of bars 48 presents harmful parasitic torque, which is explained thanks to this new approach of prediction of torque pulsations.
After this first example, we conclude that even for three-phase induction machines, the classical approach of rotor cage modeling (simply by one α-β rotor plane) can only be used if the combination of phase number and bar number does not lead to harmful interactions between space and time harmonics (like the combination Nph = 3, Nbar = 49 and p1 = 2). However, when the combination causes harmful interactions (like the one with 48 bars in this example), it is important to consider several α-β rotor planes in modeling (4 planes in this example, for 48 bars) to predict the parasitic torque pulsations.
5.2. Five-Phase Induction Machine with Double-Layer Tooth Concentrated Winding
The machine parameters are shown in
Appendix D. The
Table 5 shows simulation parameters.
Two different stator sequences are imposed in separate simulations (u = 1 and u = 3). According to the Equation (19), the sequence “u = 1” induces in the rotor bars the set of harmonics “v = 1, −4, 6, −9, 11, −14, 16, −19 …”. The sequence “u = 3” induces the set of rotor current harmonics “v = −2, 3, −7, 8, −12, 13, −17, 18 …”.
This machine was studied in a previous paper [
22]. In this paper it has been observed that the number of bars 64 presents important torque pulsations, especially referring to the number 65 characterized by a very low torque harmonics content. Nevertheless, according to the rules in the reference [
2] (pp. 340–341), for this machine topology (5 phases, 20 stator slots and 4 pole-pairs) the number of bars 64 is not forbidden. In fact, the reported rules for selecting the rotor bars number are defined for three-phase machines and are not directly applicable to multiphase machines.
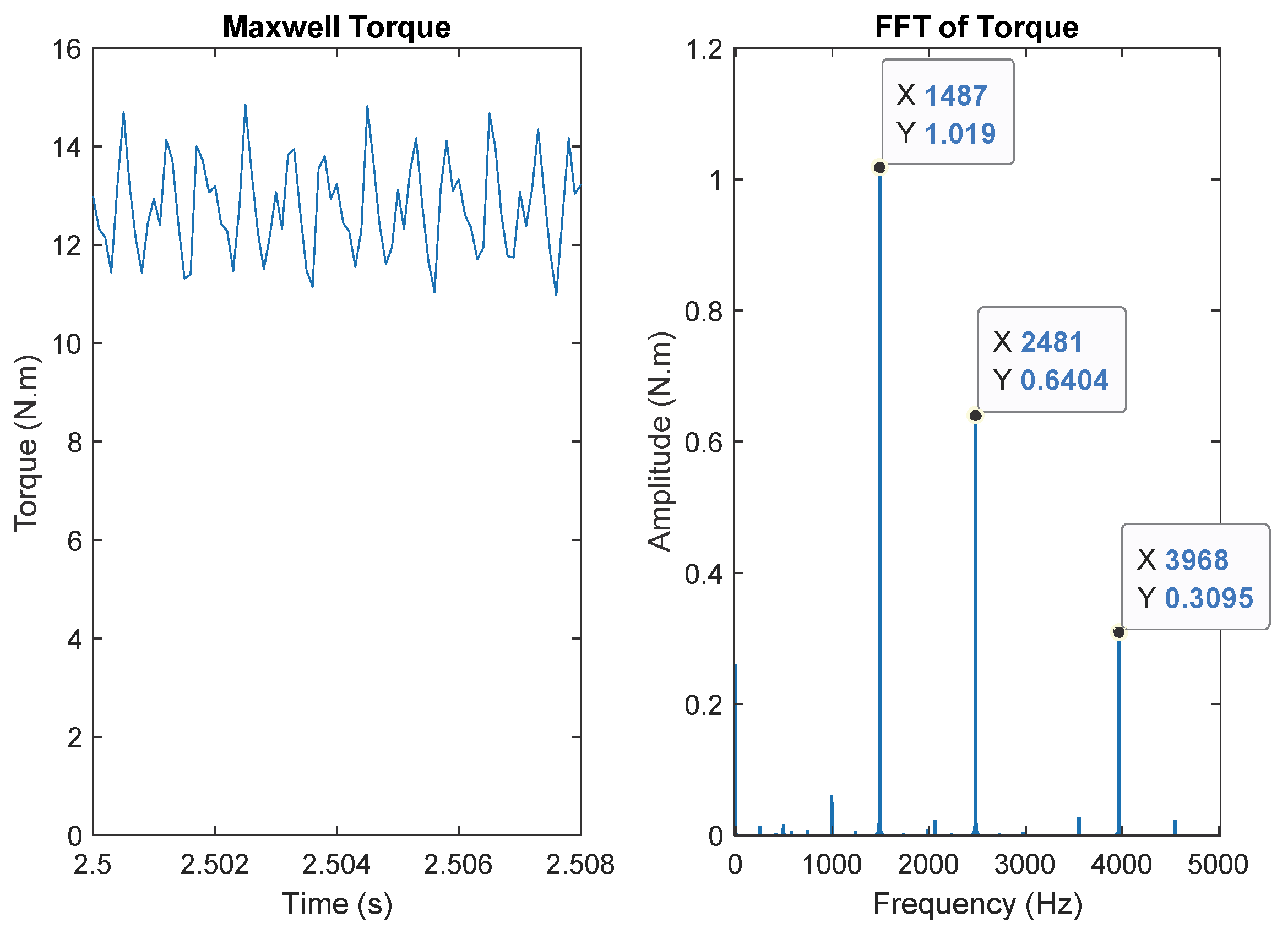
To explain the origin of torque pulsations for this machine with 64 bars, the developed torque under both sequences is extracted from the simulation results, and a harmonic analysis is done and shown in
Figure 7 and
Figure 8.
With this number of bars, the developed torque under both sequences contains important pulsating components. To understand the origin of these components, the distribution of space harmonics (up to v = 50) in the matrix
, according to the
Figure 2, is shown in the
Figure 9.
This figure shows the interactions between space and time harmonics.
The space harmonics generated by the sequence “u = 1” are distributed in the second line of Figure, and the sequence “u = 3” corresponds to the third line. Under both stator sequences, seven rotor planes, the first rotor zero-sequence (column 0) and the second rotor zero-sequence (column 0’) are excited, each one of them contains several superposed harmonics.
According to the
Appendix B, the frequencies of pulsating torque components can be predicted for the sequence “u = 1” in
Table 6 and for the sequence “u = 3” in
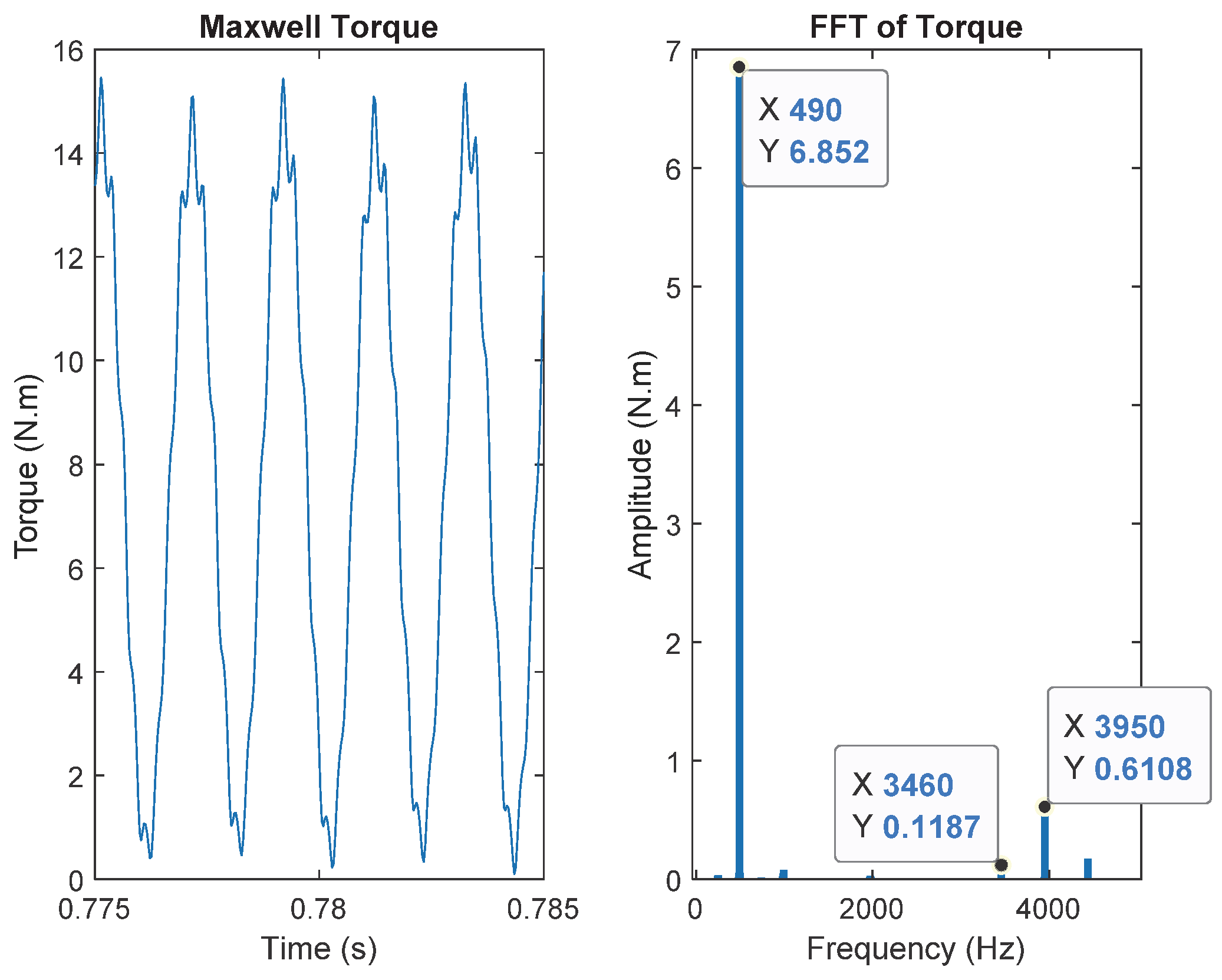
Table 7. According to the
Table 6, the frequencies of torque pulsations for the sequence “u = 1” (space harmonics considered up to “v = 50”) are: 1487, 2481 and 3968 Hz. These frequencies are the same as the predominant frequencies in F-E results (
Figure 7). The interactions in the
Table 7 produce three main frequencies: 490, 3460 and 3950 Hz, the same as F-E results in
Figure 8.
In
Appendix D, the 20 most important space harmonics regarding amplitude are indicated in the
Table A4. To have an idea about the importance of a torque pulsation, every interaction between two harmonics among the 20 most important ones (
Table A4) is colored in gray.
Under the sequence “u = 1”, the only interaction between a space and a time harmonic whose amplitudes are among the 20 most important, is in the cell corresponding to the rotor zero-sequence containing the harmonic “16.p”, whose interaction generates two components (as explained in
Appendix B): a constant torque at 0 Hz, and a pulsating component of a frequency of 1487 Hz (which has the highest pulsation amplitude in
Figure 7).
Under the sequence “u = 3”, several interactions are colored in gray (interaction between two harmonics among the 20 most important in
Table A4). All these marked interactions generate a frequency of 490 Hz, which has the highest pulsation amplitude in
Figure 8.
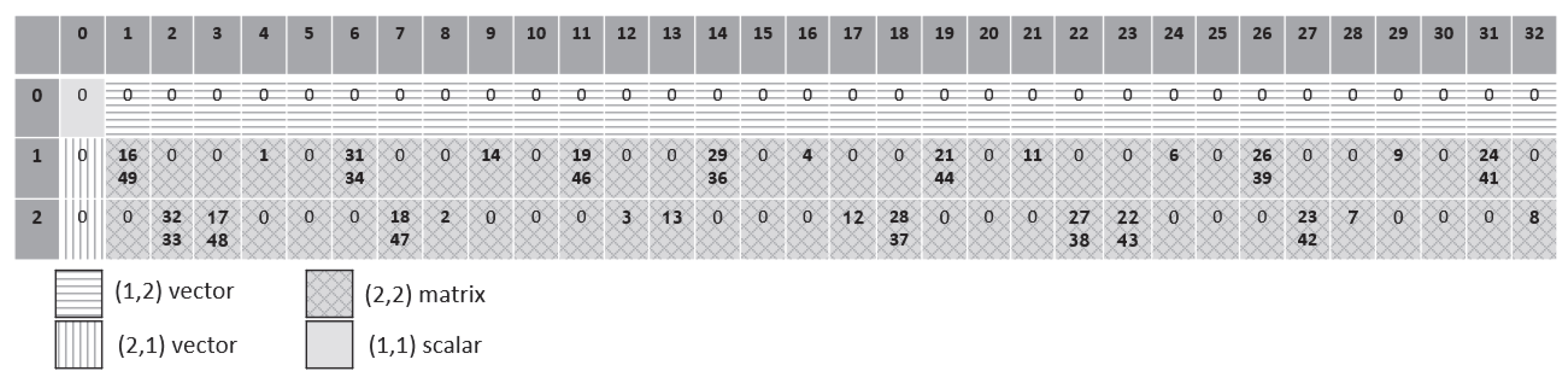
The
Figure 10 shows the space harmonics distribution in
for the machine with 65 bars. We observe that this number of bars allows to separate the harmonics better than the case of 64 bars. In fact, the harmonics with the most important amplitudes (
Table A4) do not interact between each other. Furthermore, with this number of bars, the rotor zero-sequence is not excited under both sequences.
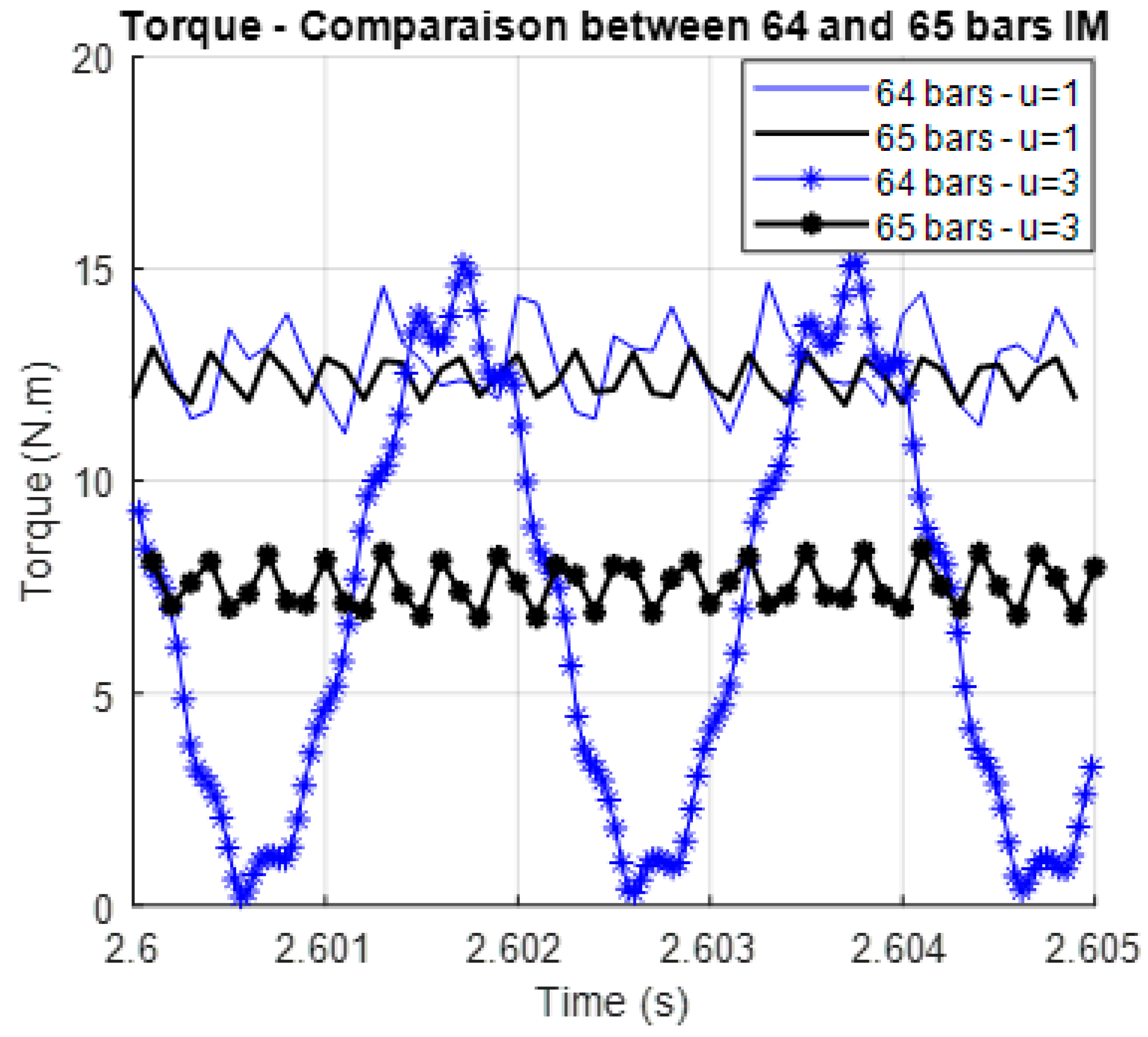
The
Figure 11 shows the comparison of the developed torque between the machines with 64 and 65 bars. With 65 bars the torque is smoother under both sequences thanks to the separation of harmonics (shown in
Figure 10). FFT analysis of torque for the new number of bars “65”, is done and shown in
Figure 12 for both sequences.
Under the sequence “u = 1” (corresponds to the black curve in
Figure 11), the predominant pulsating component is at the frequency of 3224 Hz. After the application of equations in
Appendix B, it appears that this frequency of 3224 Hz is generated by all the interactions shown in
Figure 10 (Line 1), so the interactions: 16p-49p, 31p-34p, 19p-49p, 29p-36p, 21p-44p, 26p-39p and 24p-41p (Considering only 50 space harmonics, from 1p to 50p). Comparing to the case of 64 bars (
Table 6), the interactions in the machine with 65 bars are mostly between harmonics with relatively low amplitudes (
Table A4) which explains the reduction of torque ripple thanks to this combination (N
ph = 5, N
bar = 65 and p
1 = 4).
Under the sequence “u = 3” (corresponds to the blue curve in
Figure 11), the predominant pulsating component is at the frequency of 3211 Hz. Using the same approach (
Appendix B), we determine that this frequency is generated by all the interactions in the last line of
Figure 10, so: 32p-33p, 17p-48p, 18p-47p, 28p-37p, 27p-38p, 22p-43p, 23p-42p. These harmonics have also relatively low amplitudes (
Table A4).
For five-phase induction machine, two α-β stator planes must be considered in modeling. The number of α-β rotor planes to be considered depends on the number of rotor bars. If there are interactions between harmonics with important amplitudes, the rotor planes containing these interactions must be considered to predict torque pulsations.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













