The Pareto Tracer for General Inequality Constrained Multi-Objective Optimization Problems



Abstract
:1. Introduction
2. Background and Related Work
3. Adapting the Pareto Tracer for General Inequality Constrained MOPs
- (a)
- , i.e., if significantly violates the constraint ; or
- (b)
- and , i.e., if is either active but nearly active at or if already slightly violates and a step into direction would lead to (further) violation of this constraint, indicated by .
| Algorithm 1 Build |
| Require:: predictor, : corrector direction for , : tolerance Ensure:: index set 1: 2: fordo 3: ifthen 4: 5: else ifthen 6: 7: end if 8: end for 9: Return |
| Algorithm 2 Predictor–corrector step of the Pareto Tracer for general MOPs |
| Require:: current candidate solution, : desired distance in objective space, : tolerance Ensure:: new candidate solution 1: Compute via solving (7) 2: Compute as in (19) 3: Compute A as in (10) 4: Select as in (16) or via (15) and (21) 5: Compute via solving (20) 6: 7: 8: Compute via a Newton method starting at . For the Newton direction use the solution of (24). 9: Return |
4. Numerical Results
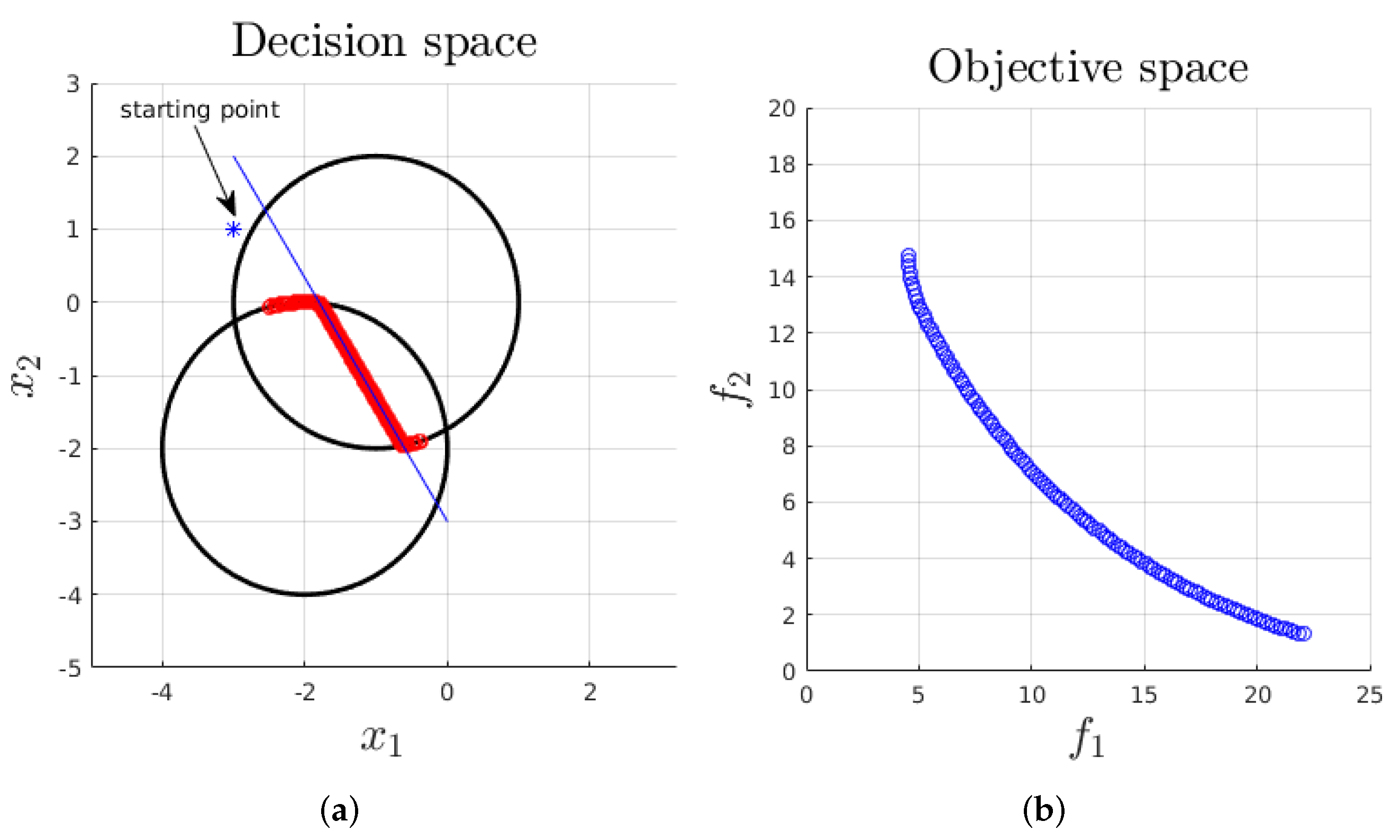
4.1. Binh and Korn
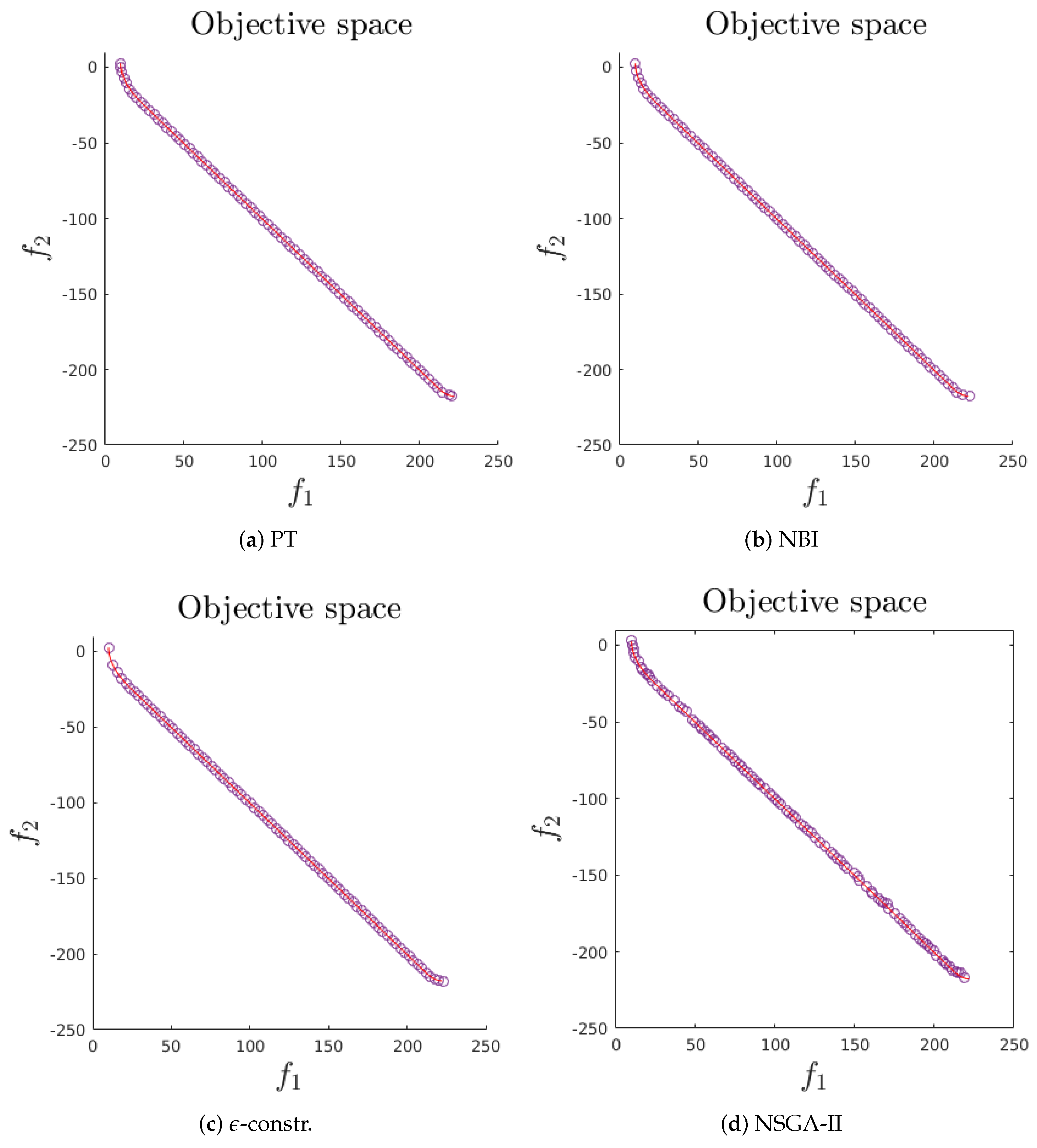
4.2. Chakong and Haimes
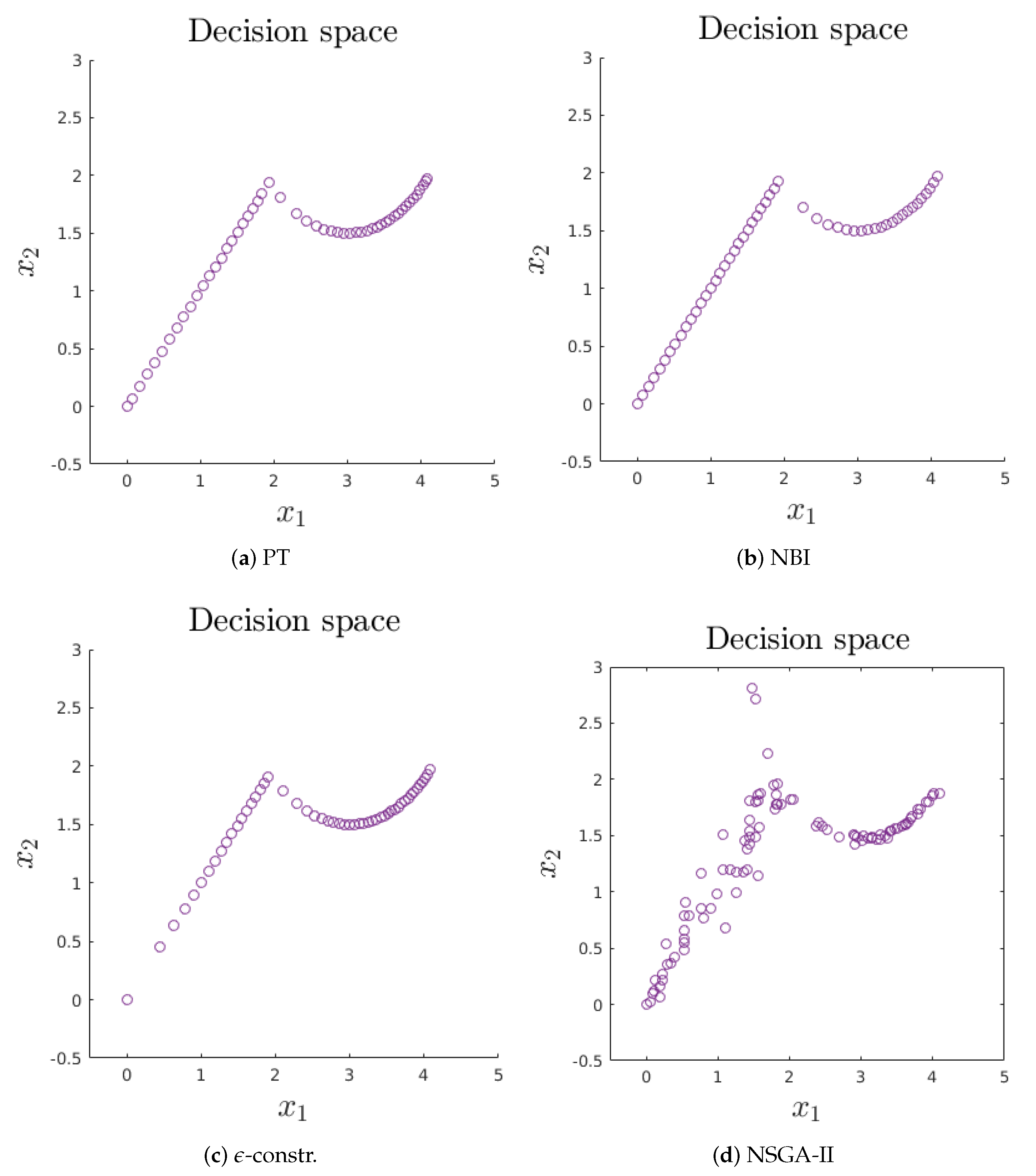
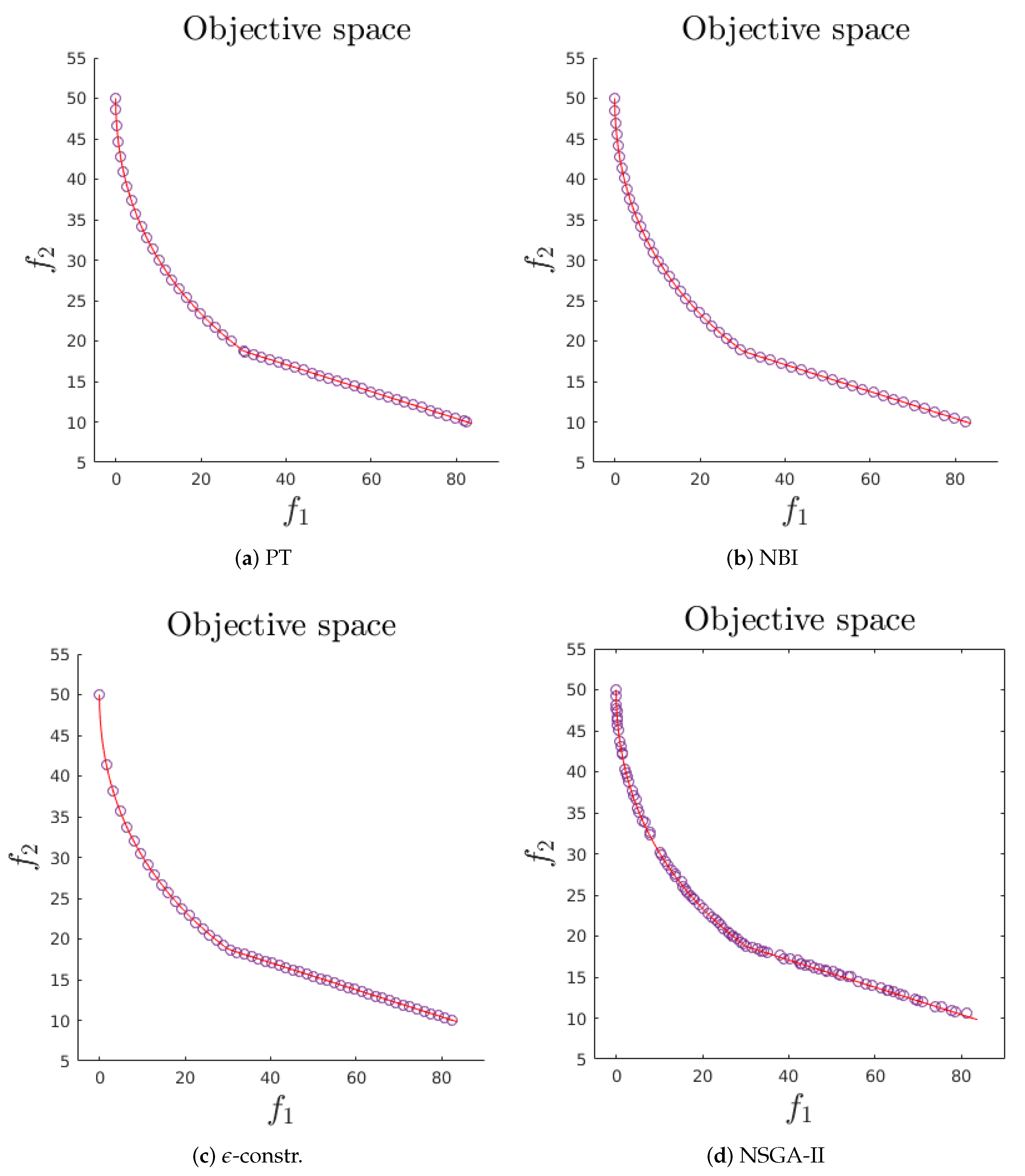
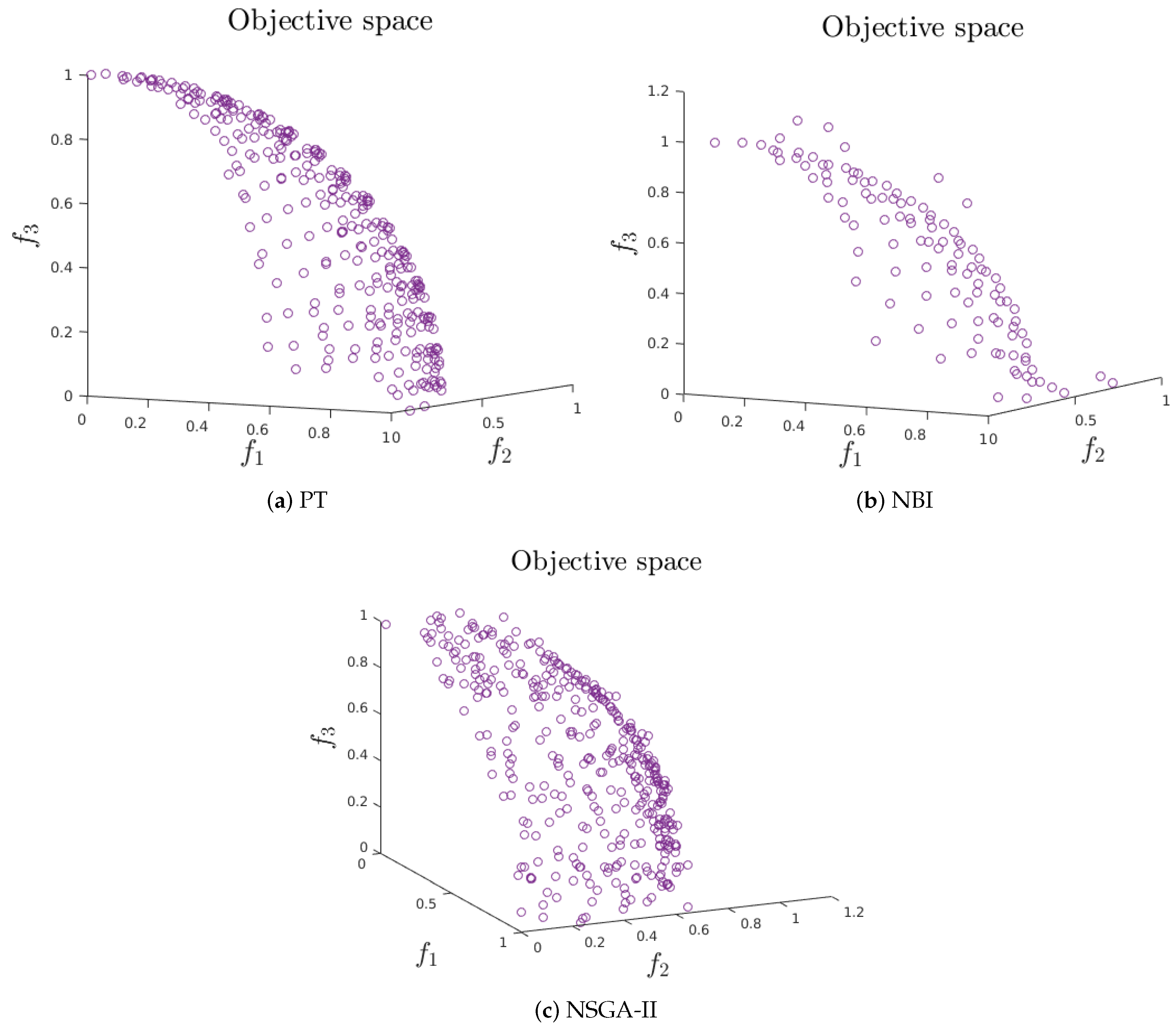
4.3. Tamaki
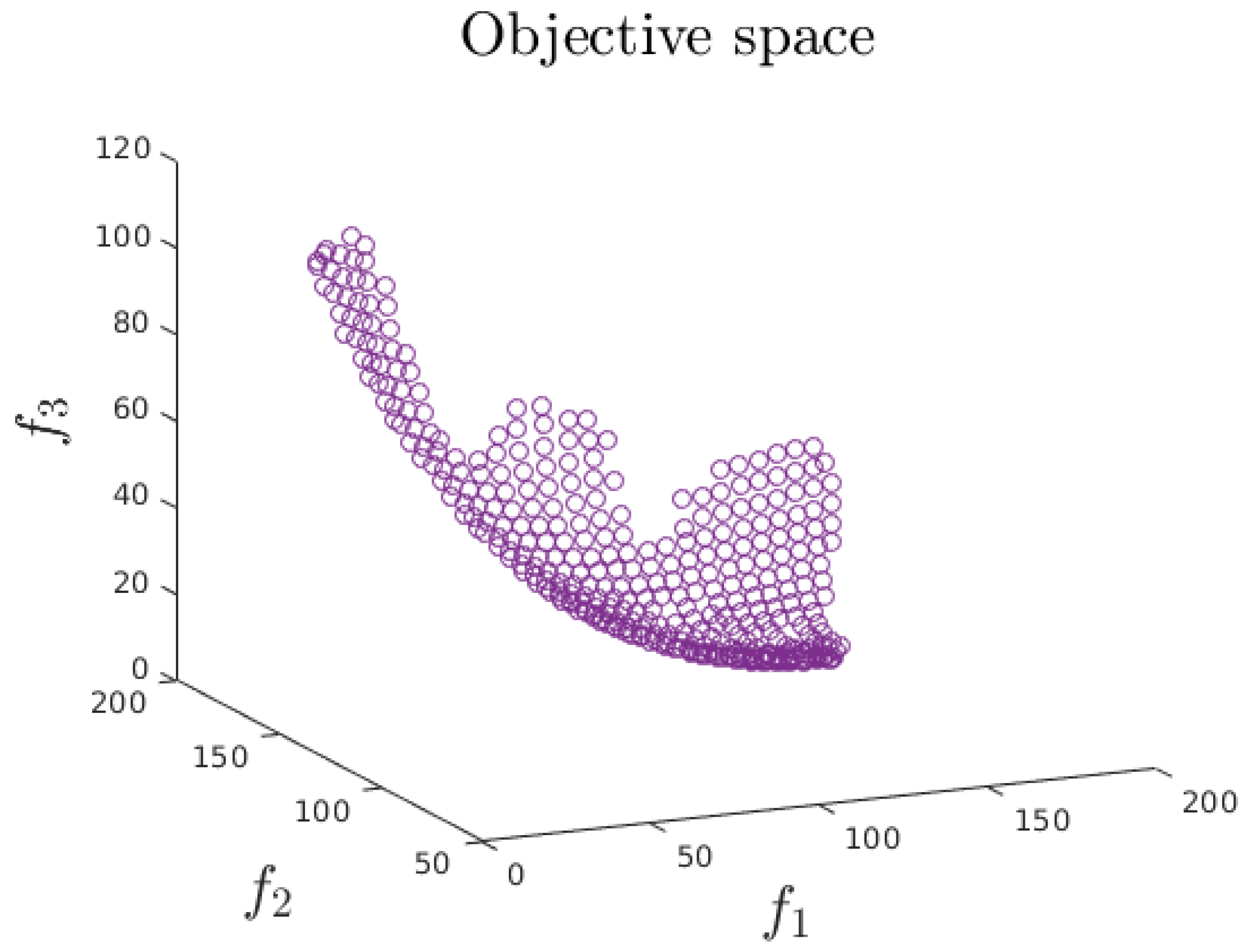
4.4. BCS
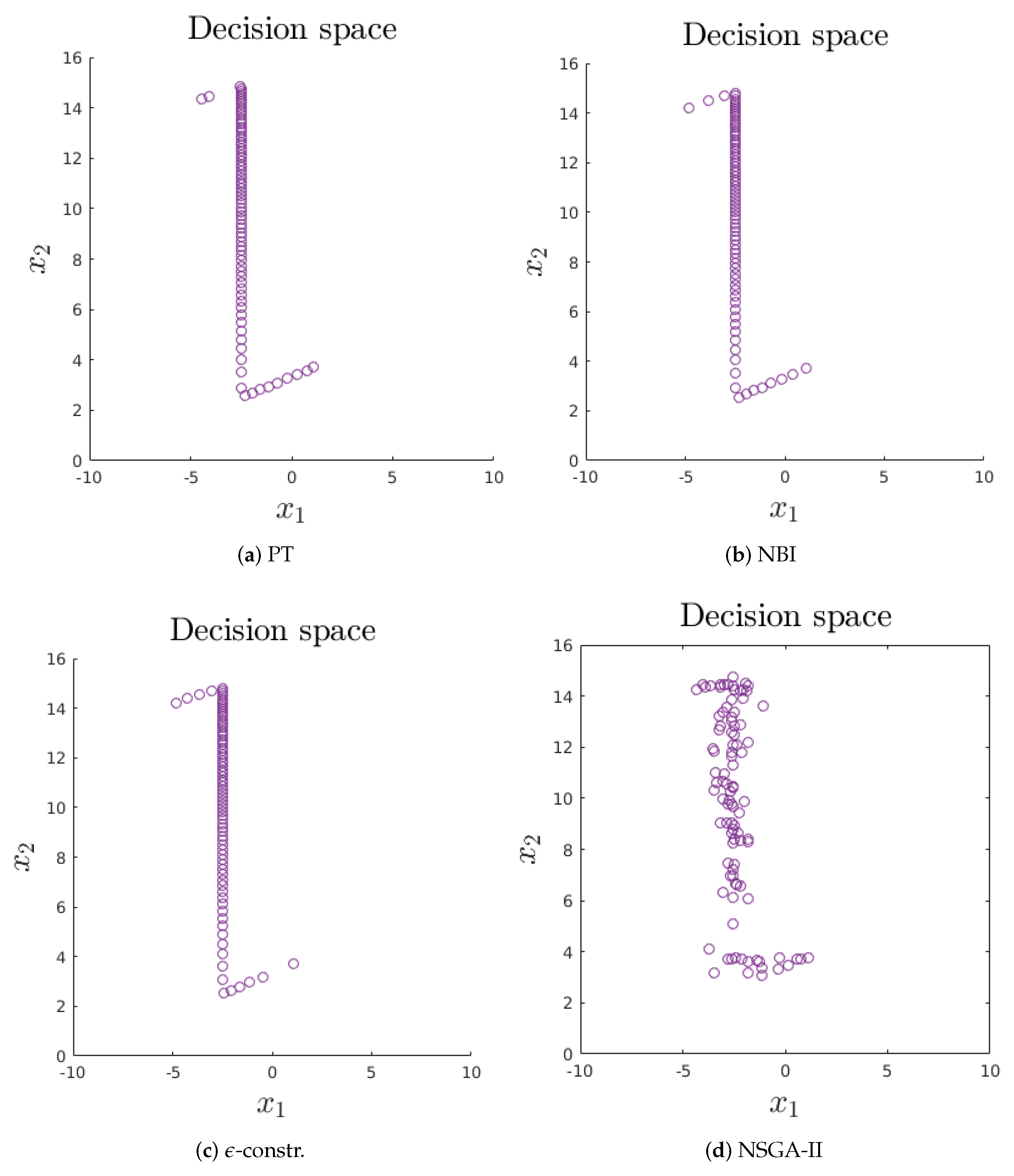
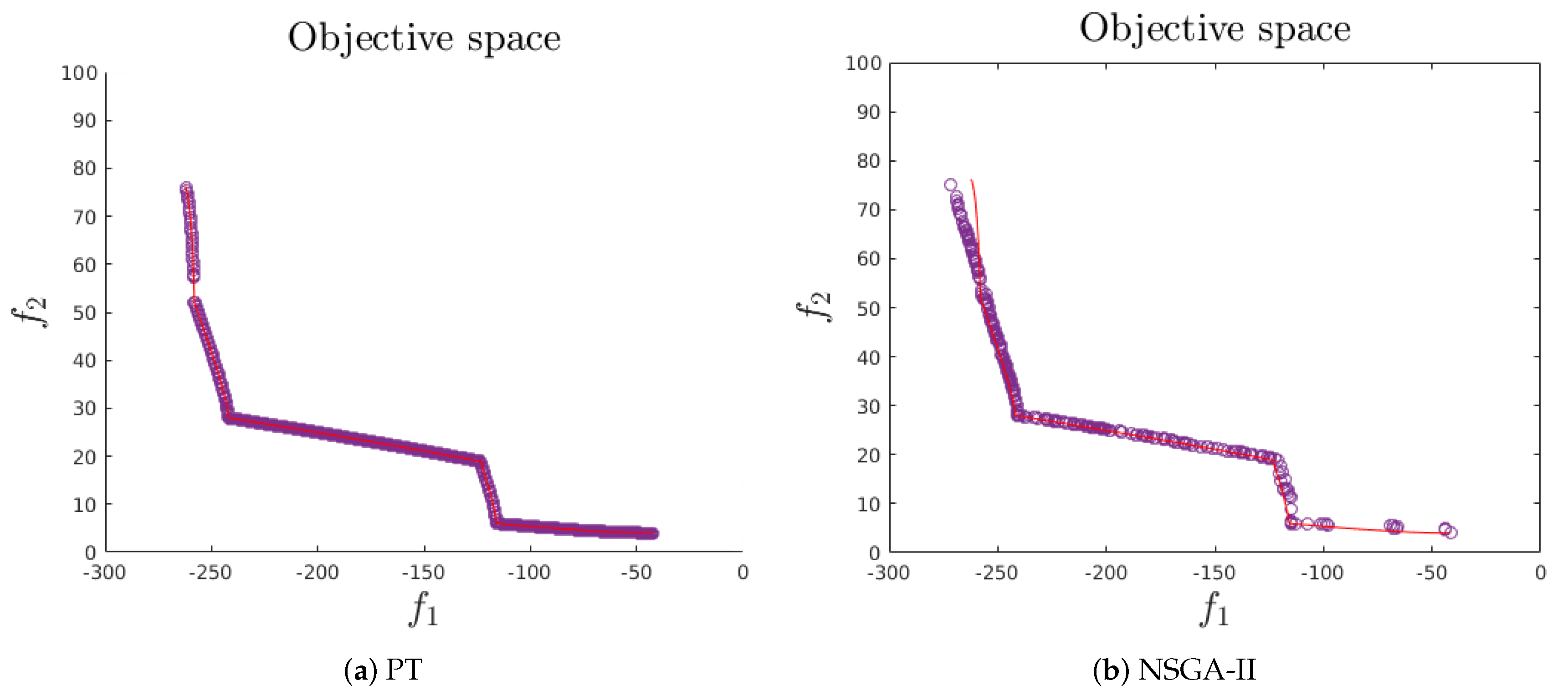
4.5. Osykzka and Kundu
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Hillermeier, C. Nonlinear Multiobjective Optimization: A Generalized Homotopy Approach; Springer: Basel, Switzerland, 2001. [Google Scholar]
- Martín, A.; Schütze, O. Pareto Tracer: A predictor–corrector method for multi-objective optimization problems. Eng. Optim. 2018, 50, 516–536. [Google Scholar] [CrossRef]
- Deb, K. Multi-Objective Optimization Using Evolutionary Algorithms; John Wiley & Sons: Chichester, UK, 2001. [Google Scholar]
- Peitz, S.; Dellnitz, M. A Survey of Recent Trends in Multiobjective Optimal Control—Surrogate Models, Feedback Control and Objective Reduction. Math. Comput. Appl. 2018, 23, 30. [Google Scholar] [CrossRef] [Green Version]
- Miettinen, K. Nonlinear Multiobjective Optimization; Springer Science & Business Media: Boston, MA, USA, 2012. [Google Scholar]
- Ehrgott, M. Multicriteria Optimization; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Karush, W. Minima of Functions of Several Variables with Inequalities as Side Constraints. Master’s Thesis, Department of Mathematics, University of Chicago, Chicago, IL, USA, 1939. [Google Scholar]
- Kuhn, H.W.; Tucker, A.W. Nonlinear programming. In Proceedings of the Second Berkeley Symposium on Mathematical Statistics and Probability, Berkeley, CA, USA, 31 July–12 August 1950; University of California Press: Berkeley, CA, USA, 1951; pp. 481–492. [Google Scholar]
- Gass, S.; Saaty, T. The computational algorithm for the parametric objective function. Nav. Res. Logist. Q. 1955, 2, 39–45. [Google Scholar] [CrossRef]
- Mavrotas, G. Effective implementation of the ϵ-constraint method in Multi-Objective Mathematical Programming problems. Appl. Math. Comput. 2009, 213, 455–465. [Google Scholar]
- Steuer, R.E.; Choo, E.U. An Interactive Weighted Tchebycheff Prodecure for Multiple Objective Progamming. Math. Program. 1983, 26, 326–344. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.K. A CHIM-based interactive Tchebycheff procedure for multiple objective decision making. Comput. Oper. Res. 2006, 33, 1557–1574. [Google Scholar] [CrossRef]
- Wierzbicki, A.P. A mathematical basis for satisficing decision making. Math. Model. 1982, 3, 391–405. [Google Scholar] [CrossRef] [Green Version]
- Bogetoft, P.; Hallefjord, A.; Kok, M. On the convergence of reference point methods in multiobjective programming. Eur. J. Oper. Res. 1988, 34, 56–68. [Google Scholar] [CrossRef]
- Hernández Mejá, J.A.; Schütze, O.; Cuate, O.; Lara, A.; Deb, K. RDS-NSGA-II: A Memetic Algorithm for Reference Point Based Multi-objective Optimization. Eng. Optim. 2017, 49, 828–845. [Google Scholar] [CrossRef]
- Das, I.; Dennis, J.E. Normal-boundary intersection: A new method for generating the Pareto surface in nonlinear multicriteria optimization problems. SIAM J. Optim. 1998, 8, 631–657. [Google Scholar] [CrossRef] [Green Version]
- Klamroth, K.; Tind, J.; Wiecek, M. Unbiased Approximation in Multicriteria Optimization. Math. Methods Oper. Res. 2002, 56, 413–437. [Google Scholar] [CrossRef]
- Fliege, J. Gap-free computation of Pareto-points by quadratic scalarizations. Math. Methods Oper. Res. 2004, 59, 69–89. [Google Scholar] [CrossRef]
- Eichfelder, G. Adaptive Scalarization Methods in Multiobjective Optimization; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Hernández, C.; Naranjani, Y.; Sardahi, Y.; Liang, W.; Schütze, O.; Sun, J.Q. Simple Cell Mapping Method for Multi-objective Optimal Feedback Control Design. Int. J. Dyn. Control 2013, 1, 231–238. [Google Scholar] [CrossRef]
- Xiong, F.R.; Qin, Z.C.; Xue, Y.; Schütze, O.; Ding, Q.; Sun, J.Q. Multi-objective optimal design of feedback controls for dynamical systems with hybrid simple cell mapping algorithm. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 1465–1473. [Google Scholar] [CrossRef]
- Fernández, J.; Schütze, O.; Hernández, C.; Sun, J.Q.; Xiong, F.R. Parallel simple cell mapping for multi-objective optimization. Eng. Optim. 2016, 48, 1845–1868. [Google Scholar] [CrossRef]
- Sun, J.Q.; Xiong, F.R.; Schütze, O.; Hernández, C. Cell Mapping Methods—Algorithmic Approaches and Applications; Springer: Singapore, 2019. [Google Scholar]
- Schütze, O.; Mostaghim, S.; Dellnitz, M.; Teich, J. Covering Pareto Sets by Multilevel Evolutionary Subdivision Techniques. In Proceedings of the International Conference on Evolutionary Multi-Criterion Optimization (EMO 2003), Faro, Portugal, 8–11 April 2003; Fonseca, C.M., Fleming, P.J., Zitzler, E., Deb, K., Thiele, L., Eds.; Springer: Berlin/Heidelberg, Germany, 2003; pp. 118–132. [Google Scholar]
- Dellnitz, M.; Schütze, O.; Hestermeyer, T. Covering Pareto Sets by Multilevel Subdivision Techniques. J. Optim. Theory Appl. 2005, 124, 113–155. [Google Scholar] [CrossRef]
- Jahn, J. Multiobjective search algorithm with subdivision technique. Comput. Optim. Appl. 2006, 35, 161–175. [Google Scholar] [CrossRef]
- Schütze, O.; Vasile, M.; Junge, O.; Dellnitz, M.; Izzo, D. Designing optimal low thrust gravity assist trajectories using space pruning and a multi-objective approach. Eng. Optim. 2009, 41, 155–181. [Google Scholar] [CrossRef] [Green Version]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Coello Coello, C.A.; Lamont, G.B.; Van Veldhuizen, D.A. Evolutionary Algorithms for Solving Multi-Objective Problems, 2nd ed.; Springer: New York, NY, USA, 2007. [Google Scholar]
- Beume, N.; Naujoks, B.; Emmerich, M. SMS-EMOA: Multiobjective selection based on dominated hypervolume. Eur. J. Oper. Res. 2007, 181, 1653–1669. [Google Scholar] [CrossRef]
- Lara, A.; Sanchez, G.; Coello Coello, C.A.; Schütze, O. HCS: A new local search strategy for memetic multiobjective evolutionary algorithms. IEEE Trans. Evol. Comput. 2009, 14, 112–132. [Google Scholar] [CrossRef]
- Zhou, A.; Qu, B.Y.; Li, H.; Zhao, S.Z.; Suganthan, P.N.; Zhang, Q. Multiobjective evolutionary algorithms: A survey of the state of the art. Swarm Evol. Comput. 2011, 1, 32–49. [Google Scholar] [CrossRef]
- Cuate, O.; Schütze, O. Variation Rate to Maintain Diversity in Decision Space within Multi-Objective Evolutionary Algorithms. Math. Comput. Appl. 2019, 24, 82. [Google Scholar] [CrossRef] [Green Version]
- Schütze, O.; Hernández, C. Archiving Strategies for Evolutionary Multi-objective Optimization Algorithms; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Harada, K.; Sakuma, J.; Kobayashi, S. Local search for multiobjective function optimization: Pareto descent method. In Proceedings of the 8th Annual Conference on Genetic and Evolutionary Computation, Seattle, WA, USA, 8–12 July 2006; pp. 659–666. [Google Scholar]
- Schütze, O.; Coello, C.A.C.; Mostaghim, S.; Dellnitz, M.; Talbi, E.G. Hybridizing Evolutionary Strategies with Continuation Methods for Solving Multi-objective Problems. IEEE Trans. Evol. Comput. 2008, 19, 762–769. [Google Scholar] [CrossRef]
- Zapotecas Martínez, S.; Coello Coello, C.A. A proposal to hybridize multi-objective evolutionary algorithms with non-gradient mathematical programming techniques. In Proceedings of the 10th International Conference on Parallel Problem Solving From Nature (PPSN ’08), Dortmund, Germany, 13–17 September 2008; pp. 837–846. [Google Scholar]
- Bosman, P.A.N. On gradients and hybrid evolutionary algorithms for real-valued multiobjective optimization. IEEE Trans. Evol. Comput. 2011, 16, 51–69. [Google Scholar] [CrossRef]
- Schütze, O.; Martín, A.; Lara, A.; Alvarado, S.; Salinas, E.; Coello, C.A. The Directed Search Method for Multiobjective Memetic Algorithms. J. Comput. Optim. Appl. 2016, 63, 305–332. [Google Scholar] [CrossRef]
- Schütze, O.; Alvarado, S.; Segura, C.; Landa, R. Gradient subspace approximation: A direct search method for memetic computing. Soft Comput. 2016, 21, 6331–6350. [Google Scholar] [CrossRef]
- Cuate, O.; Ponsich, A.; Uribe, L.; Zapotecas, S.; Lara, A.; Schütze, O. A New Hybrid Evolutionary Algorithm for the Treatment of Equality Constrained MOPs. Mathematics 2020, 8, 7. [Google Scholar] [CrossRef] [Green Version]
- Martin, B.; Goldsztejn, A.; Granvilliers, L.; Jermann, C. Certified Parallelotope Continuation for One-Manifolds. SIAM J. Numer. Anal. 2013, 51, 3373–3401. [Google Scholar] [CrossRef]
- Martin, B.; Goldsztejn, A.; Granvilliers, L.; Jermann, C. On continuation methods for non-linear bi-objective optimization: Towards a certified interval-based approach. J. Glob. Optim. 2014, 64, 3–16. [Google Scholar] [CrossRef] [Green Version]
- Pereyra, V.; Saunders, M.; Castillo, J. Equispaced Pareto front construction for constrained bi-objective optimization. Math. Comput. Model. 2013, 57, 2122–2131. [Google Scholar] [CrossRef]
- Wang, H. Zigzag Search for Continuous Multiobjective Optimization. Inf. J. Comput. 2013, 25, 654–665. [Google Scholar] [CrossRef]
- Wang, H. Direct zigzag search for discrete multi-objective optimization. Comput. Oper. Res. 2015, 61, 100–109. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, F.; Wang, H.; Xue, Y. Zigzag search for multi-objective optimization considering generation cost and emission. Appl. Energy 2019, 255. [Google Scholar] [CrossRef]
- Recchioni, M.C. A path following method for box-constrained multiobjective optimization with applications to goal programming problems. Math. Methods Oper. Res. 2003, 58, 69–85. [Google Scholar] [CrossRef]
- Ringkamp, M.; Ober-Blöbaum, S.; Dellnitz, M.; Schütze, O. Handling high dimensional problems with multi-objective continuation methods via successive approximation of the tangent space. Eng. Optim. 2012, 44, 1117–1146. [Google Scholar] [CrossRef]
- Schütze, O.; Cuate, O.; Martín, A.; Peitz, S.; Dellnitz, M. Pareto Explorer: A global/local exploration tool for many-objective optimization problems. Eng. Optim. 2020, 52, 832–855. [Google Scholar] [CrossRef]
- Fliege, J.; Drummond, L.M.G.; Svaiter, B.F. Newton’s Method for Multiobjective Optimization. SIAM J. Optim. 2009, 20, 602–626. [Google Scholar] [CrossRef] [Green Version]
- Julia. JuMP—Julia for Mathematical Optimization. Available online: http://www.juliaopt.org/JuMP.jl/v0.14/ (accessed on 17 December 2020).
- Tian, Y.; Cheng, R.; Zhang, X.; Jin, Y. PlatEMO: A MATLAB platform for evolutionary multi-objective optimization [educational forum]. IEEE Comput. Intell. Mag. 2017, 12, 73–87. [Google Scholar] [CrossRef] [Green Version]
- Griewank, A.; Walther, A. Evaluating Derivatives: Principles and Techniques of Algorithmic Differentiation; SIAM: Philadelphia, PA, USA, 2008. [Google Scholar]
- Schütze, O.; Esquivel, X.; Lara, A.; Coello, C.A.C. Using the Averaged Hausdorff Distance as a Performance Measure in Evolutionary Multi-Objective Optimization. IEEE Trans. Evol. Comput. 2012, 16, 504–522. [Google Scholar] [CrossRef]
- Bogoya, J.M.; Vargas, A.; Cuate, O.; Schütze, O. A (p, q)-averaged Hausdorff distance for arbitrary measurable sets. Math. Comput. Appl. 2018, 23, 51. [Google Scholar] [CrossRef] [Green Version]
- Bogoya, J.M.; Vargas, A.; Schütze, O. The Averaged Hausdorff Distances in Multi-Objective Optimization: A Review. Mathematics 2019, 7, 894. [Google Scholar] [CrossRef] [Green Version]
- Binh, T.T.; Korn, U. MOBES: A multiobjective evolution strategy for constrained optimization problems. In Proceedings of the Third International Conference on Genetic Algorithms (Mendel 97), Brno, Czech Republic, 25–27 June 1997; Volume 25, pp. 176–182. [Google Scholar]
- Chankong, V.; Haimes, Y. Multiobjective Decision Making: Theory and Methodology; Dover Publications: Mineola, NY, USA, 2008. [Google Scholar]
- Osyczka, A.; Kundu, S. A new method to solve generalized multicriteria optimization problems using the simple genetic algorithm. Struct. Optim. 1995, 10, 94–99. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Population Size | 100 |
| Number of generations | 20 |
| Probability of crossover | 0.9 |
| Probability of mutation | 0.5 |
| PT | NBI | -Constr. | NSGA-II | |
|---|---|---|---|---|
| Solutions | 52 | 52 | 52 | 100 |
| Function Evaluations | 151 | 427 | 336 | 2000 |
| Jacobian Evaluations | 133 | 425 | 336 | - |
| Hessian Evaluations | - | 373 | 284 | - |
| Total of Evaluations | 683 | 8095 | 6224 | 2000 |
| 0.6050 | 0.6025 | 0.9272 | 0.5626 |
| Population Size | 100 |
| Number of generations | 30 |
| Probability of crossover | 0.9 |
| probability of mutation | 0.5 |
| PT | NBI | -Constr. | NSGA-II | |
|---|---|---|---|---|
| Solutions | 80 | 80 | 80 | 100 |
| Function Evaluations | 540 | 678 | 578 | 3000 |
| Jacobian Evaluations | 499 | 678 | 578 | - |
| Hessian Evaluations | - | 598 | 498 | - |
| Total of Evaluations | 2536 | 12,958 | 10,858 | 3000 |
| 1.1459 | 1.1457 | 1.2141 | 1.1871 |
| Population Size | 300 |
| Number of generations | 150 |
| Probability of crossover | 0.9 |
| Probability of mutations | 0.5 |
| PT | NBI | -Constr. | NSGA-II | |
|---|---|---|---|---|
| Solutions | 305 | 112 | N/A | 300 |
| Function Evaluations | 2498 | 3758 | N/A | 450,000 |
| Jacobian Evaluations | 1101 | 3758 | N/A | - |
| Hessian Evaluations | - | 3293 | N/A | - |
| Total of Evaluations | 6902 | 91,236 | N/A | 450,000 |
| 0.0380 | 0.6353 | N/A | 0.0390 |
| Population Size | 100 |
| Number of generations | 500 |
| Probability of crossover | 0.9 |
| Probability of mutations | 0.5 |
| PT | NBI | -Constr. | NSGA-II | |
|---|---|---|---|---|
| Solutions | 378 | 0 | N/A | 4 |
| Function Evaluations | 1923 | 2290 | N/A | 50,000 |
| Jacobian Evaluations | 756 | 1641 | N/A | - |
| Hessian Evaluations | - | 1431 | N/A | - |
| Total of Evaluations | 4947 | 40,336 | N/A | 50,000 |
| 2.0658 | - | N/A | 61.7685 |
| Population Size | 435 |
| Number of generations | 50 |
| Probability of crossover | 0.9 |
| Probability of mutations | 0.5 |
| PT | NSGA-II | |
|---|---|---|
| Solutions | 435 | 428 |
| Function Evaluations | 2051 | 20,000 |
| Jacobian Evaluations | 850 | - |
| Hessian Evaluations | - | - |
| Total of Evaluations | 5451 | 20,000 |
| 1.801 | 2.4819 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Beltrán, F.; Cuate, O.; Schütze, O. The Pareto Tracer for General Inequality Constrained Multi-Objective Optimization Problems. Math. Comput. Appl. 2020, 25, 80. https://doi.org/10.3390/mca25040080
Beltrán F, Cuate O, Schütze O. The Pareto Tracer for General Inequality Constrained Multi-Objective Optimization Problems. Mathematical and Computational Applications. 2020; 25(4):80. https://doi.org/10.3390/mca25040080
Chicago/Turabian StyleBeltrán, Fernanda, Oliver Cuate, and Oliver Schütze. 2020. "The Pareto Tracer for General Inequality Constrained Multi-Objective Optimization Problems" Mathematical and Computational Applications 25, no. 4: 80. https://doi.org/10.3390/mca25040080
APA StyleBeltrán, F., Cuate, O., & Schütze, O. (2020). The Pareto Tracer for General Inequality Constrained Multi-Objective Optimization Problems. Mathematical and Computational Applications, 25(4), 80. https://doi.org/10.3390/mca25040080