Robust H∞ Loop Shaping Controller Synthesis for SISO Systems by Complex Modular Functions



Abstract
:1. Introduction
2. Brief Review of Complex Elliptic Functions
3. Standard Loop Shaping Controller Synthesis by Elliptic Functions
3.1. Loop Shaping Design Procedure
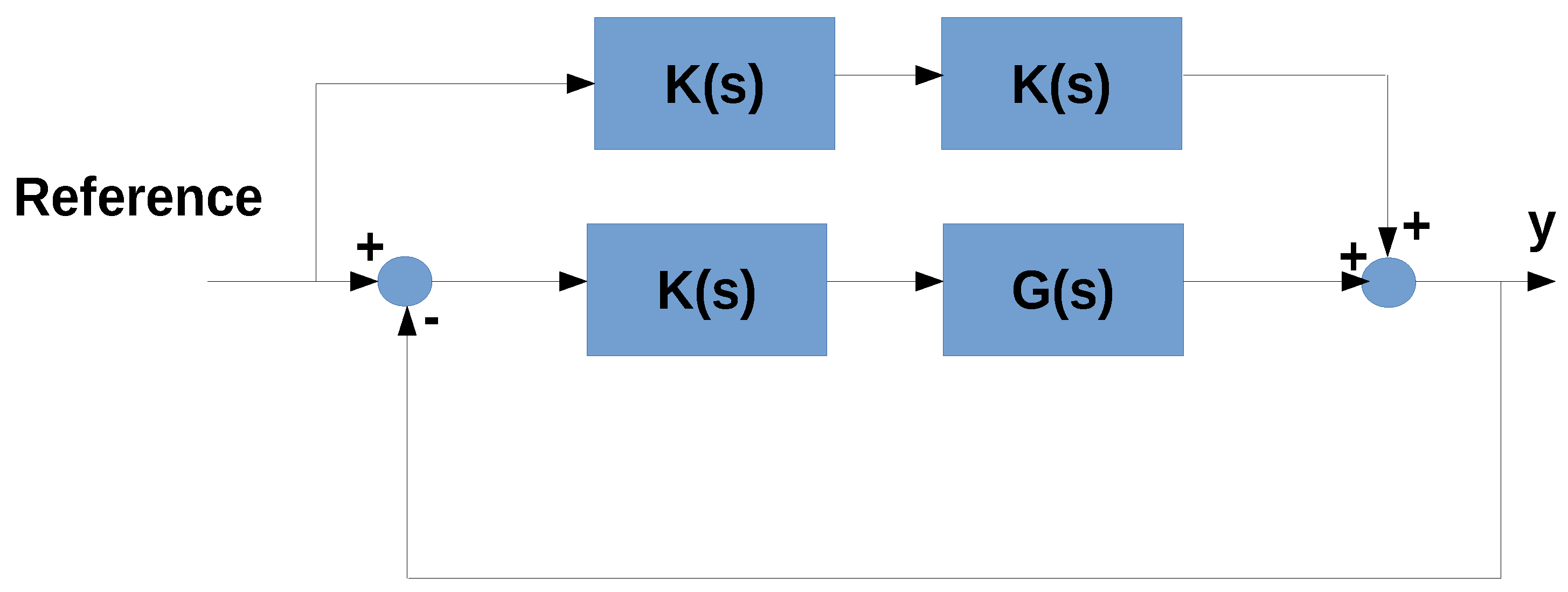
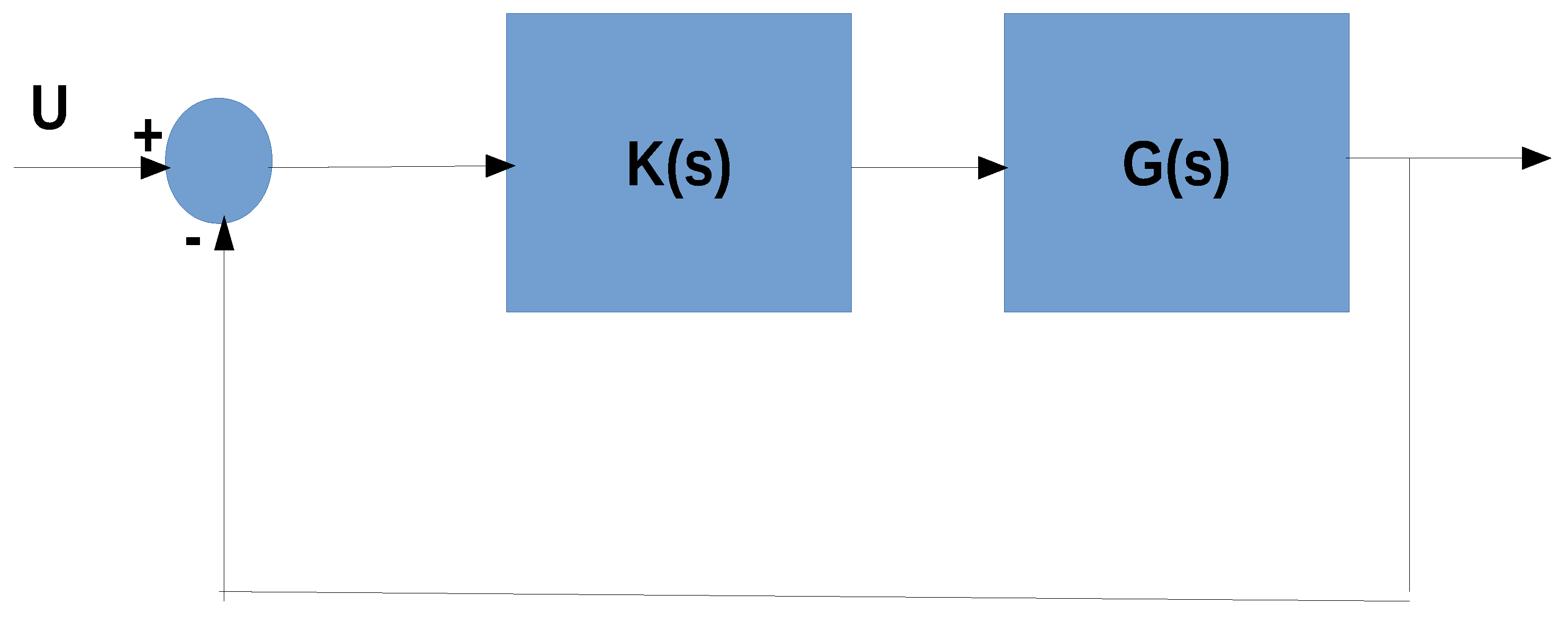
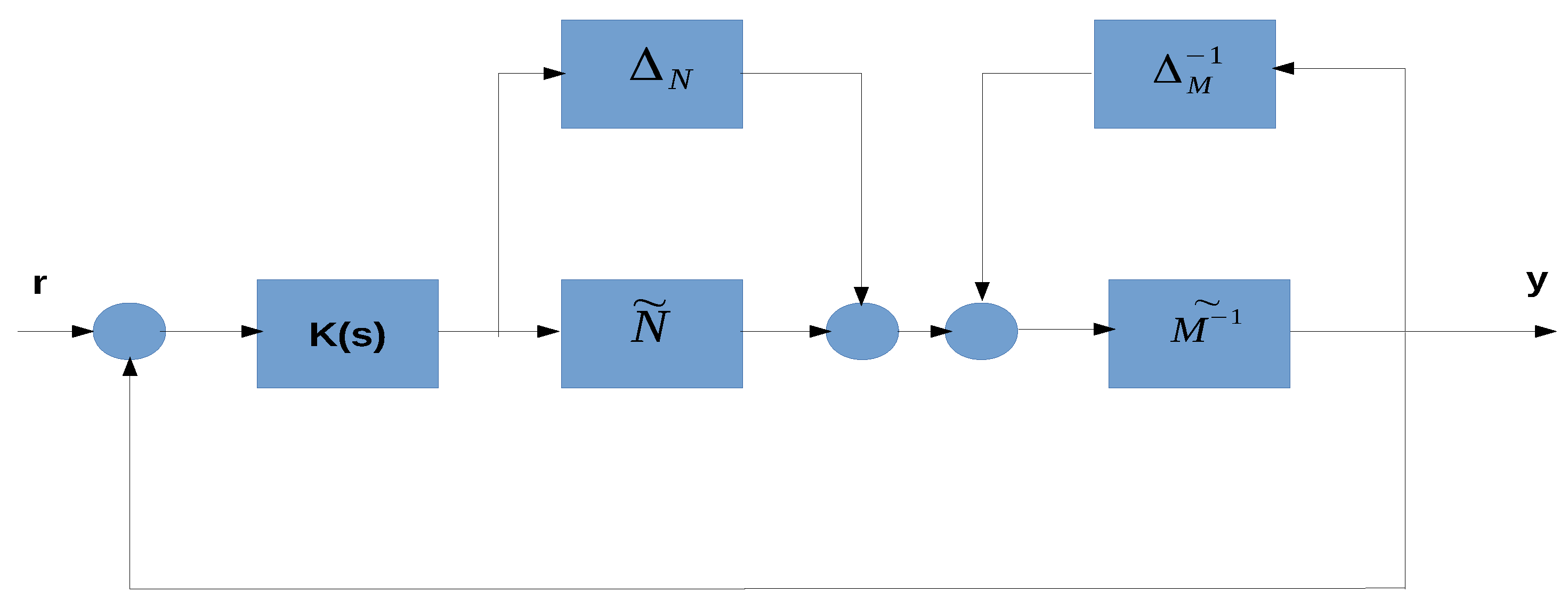
- Find the robust controller in order that the following condition is met:where is the complementary sensitivity closed-loop transfer function and and are given due to the following robust condition explained later:where and are the coprime factors withwhere and are the coprime factor uncertainties. Finally,It is important to consider that the gain shown in the feedforward compensated block diagram, depicted in Figure 1, is found using the equivalent block diagram shown in this figure. This complementary sensitivity function is obtained to derive the gain matrix and, later, the gain is obtained with the loop shaping design procedure as shown in step 2 and 3. Remember that in the robust loop shaping design given in (7), (8), and (9), the and are found obtaining the coprime factorization of the plant to be shaped as presented in Figure 2 and Figure 3.One of the novel contributions of this work is that the gain is obtained from the complementary function from Figure 1 to improve the robustness of the closed-loop system surpassing non compensated approaches as shown in [16]. As a conclusion of this robust loop shaping design procedure, first the gain matrix is obtained from the sensitivity function obtained from Figure 1 (feedforward compensated system) but considering the values of and obtained from (7)–(9) and the uncertainties of the diagrams shown in Figure 2 and Figure 3. Then, the loop shaping design procedure is concluded in steps 2 and 3.
- The second step is to find the weighting functions and in order to obtain a desired open-loop frequency response characteristic for in the following form . This step is crucial in this study because the weighting function selections are done by complex elliptic functions, for the standard and PID controller design.
- Finally, the controller is given by .
3.2. Weighting Function and Standard Controller Design with Complex Elliptic Functions
4. PID Loop Shaping Controller Synthesis by Elliptic Functions
5. Numerical Experiments
5.1. Experiment 1
5.2. Experiment 2
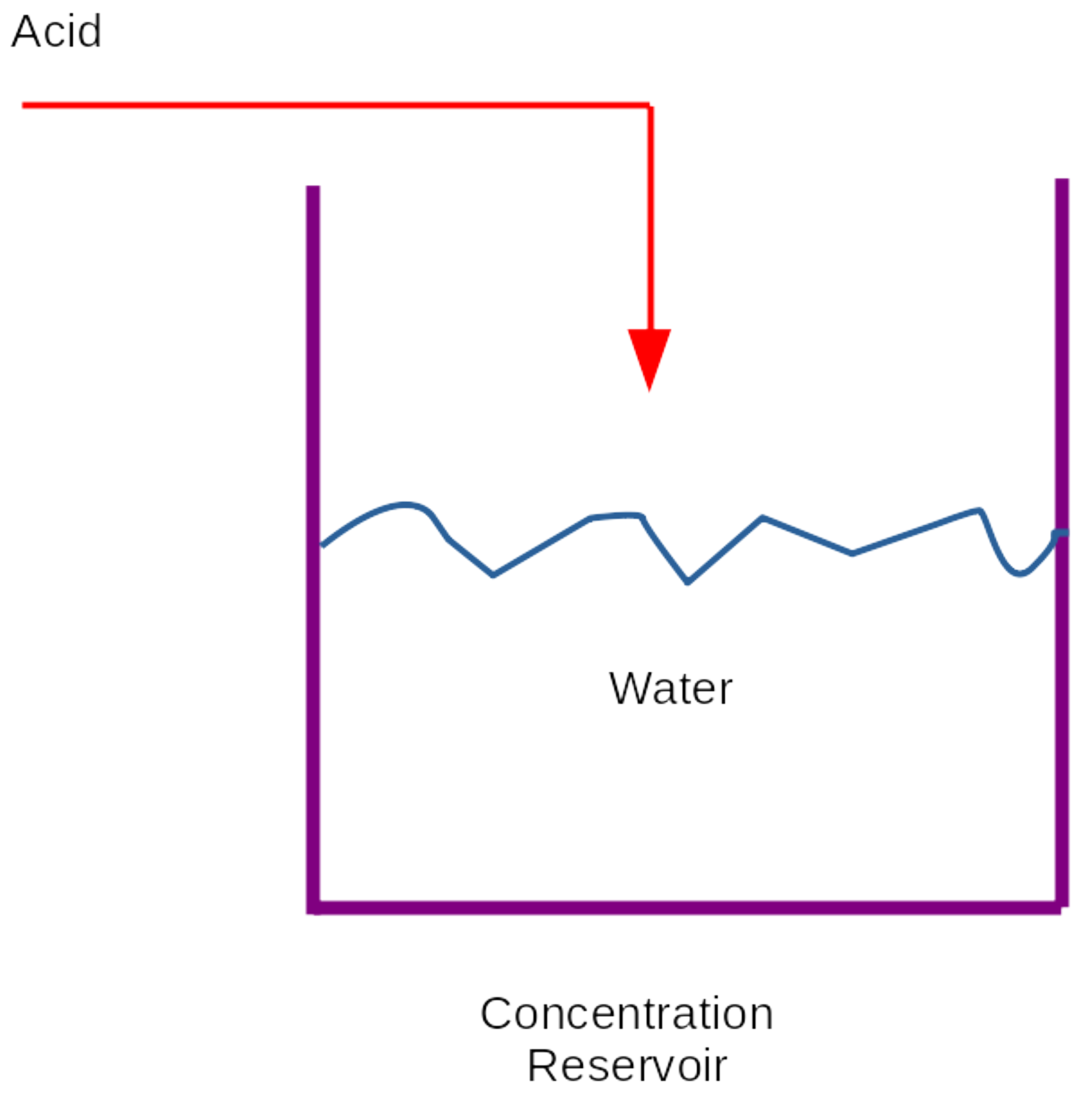
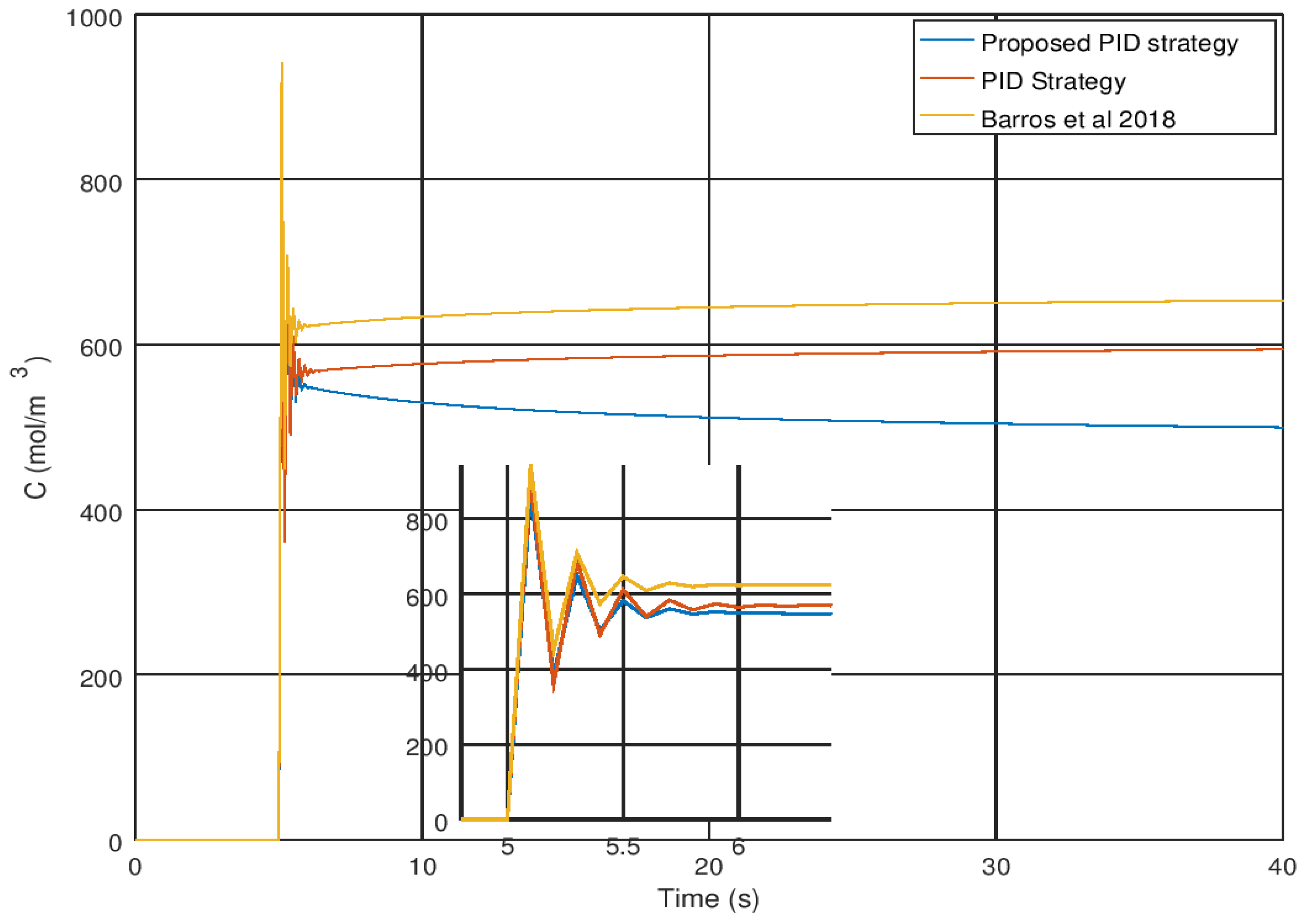
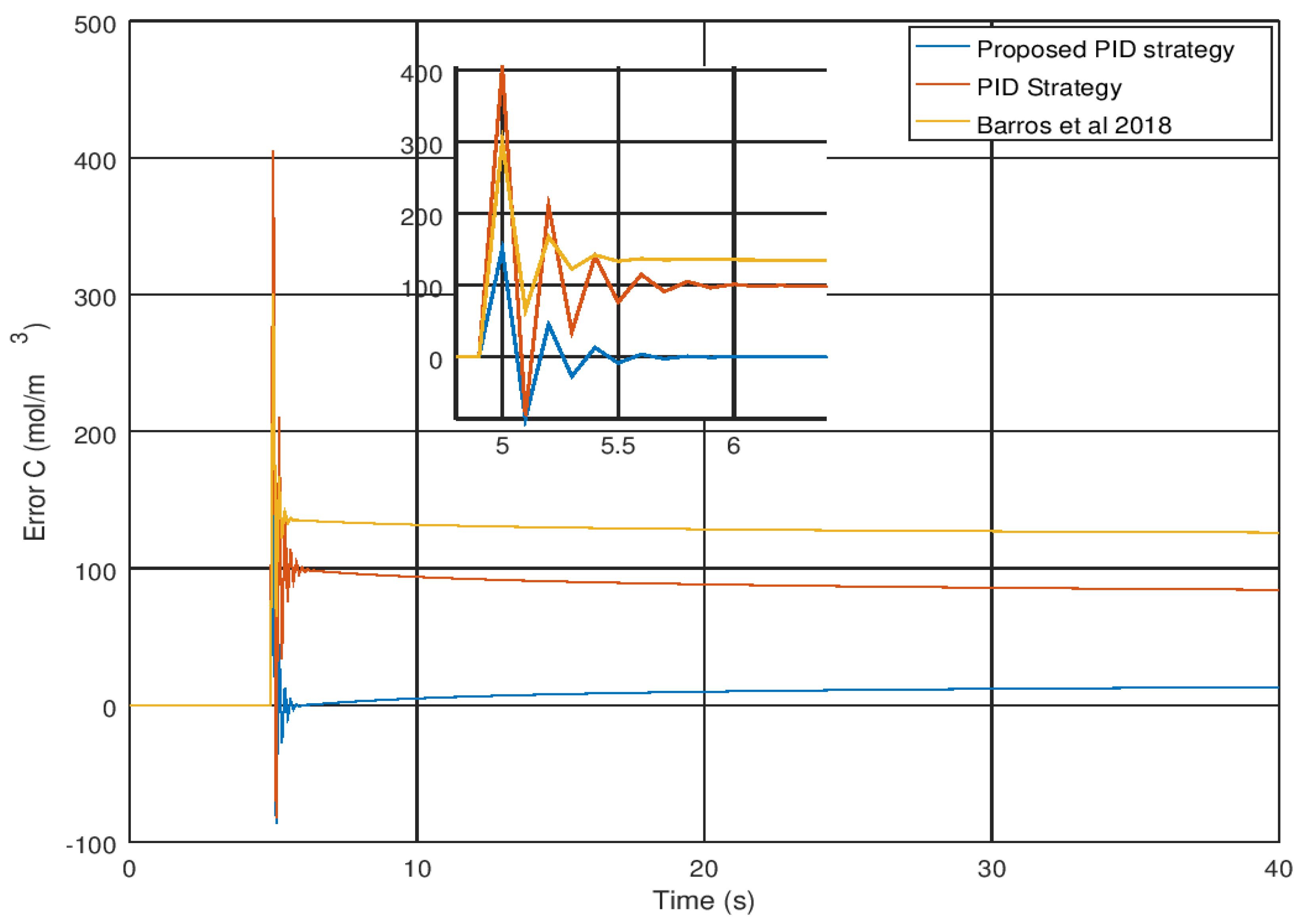
5.3. Experiment 3: Acid Concentration Regulation in a Water Reservoir
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kim, S.M.; Pereira, J.; Lopes, V.; Turra, A.; Brennan, M. Practical active control of cavity noise using loop shaping: Two case studies. Appl. Acoust. 2017, 121, 65–73. [Google Scholar] [CrossRef] [Green Version]
- Pérez, J.; Cobreces, S.; Grino, R.; Sánchez, F. H-infinity current controller for input admittance shaping of VSC-based grid applications. IEEE Trans. Power Electron. 2017, 32, 3180–3191. [Google Scholar] [CrossRef] [Green Version]
- Mercader, P.; Astrom, K.; Banos, A.; Hagglund, T. Robust PID design based on QFT and convex-concave optimization. IEEE Trans. Control. Syst. Technol. 2017, 25, 441–452. [Google Scholar] [CrossRef]
- Usami, T.; Yubai, K.; Yashiro, D.; Komada, S. Multivariable fixed-structural controller design for H-infinity loop shaping method by iterative LMI optimization using frequency response data. In Proceedings of the International Conference on Advanced Mechatronic Systems, ICAMechS, Melbourne, Australia, 30 November–3 December 2017; pp. 218–223. [Google Scholar]
- Azar, A.T.; Serrano, F.E. Stabilization of Mechanical Systems with Backlash by PI Loop Shaping. Int. J. Syst. Dyn. Appl. 2016, 5, 21–46. [Google Scholar] [CrossRef] [Green Version]
- Azar, A.T.; Serrano, F.E.; Vaidyanathan, S. Proportional Integral Loop Shaping Control Design with Particle Swarm Optimization Tuning. In Advances in System Dynamics and Control; Azar, A.T., Vaidyanathan, S., Eds.; Advances in Systems Analysis, Software Engineering, and High Performance Computing (ASASEHPC); IGI Global: Hershey, PA, USA, 2018; pp. 24–57. [Google Scholar]
- Azar, A.T.; Serrano, F.E.; Kamal, N.A.; Koubaa, A. Robust Kinematic Control of Unmanned Aerial Vehicles with Non-holonomic Constraints. In Proceedings of the International Conference on Advanced Intelligent Systems and Informatics 2020, Cairo, Egypt, 19 October 2020; Hassanien, A.E., Slowik, A., Snášel, V., El-Deeb, H., Tolba, F.M., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 839–850. [Google Scholar]
- Meghni, B.; Dib, D.; Azar, A.T.; Ghoudelbourk, S.; Saadoun, A. Robust Adaptive Supervisory Fractional Order Controller for Optimal Energy Management in Wind Turbine with Battery Storage. In Fractional Order Control and Synchronization of Chaotic Systems; Studies in Computational Intelligence; Azar, A.T., Vaidyanathan, S., Ouannas, A., Eds.; Springer International Publishing: Cham, Switzerland, 2017; Volume 688, pp. 165–202. [Google Scholar]
- Pereira, R.L.; Kienitz, K.H. H-infinity Loop Shaping Control of Input Saturated Systems with Norm Bounded Parametric Uncertainty. J. Control. Sci. Eng. 2015, 2015, 383297. [Google Scholar] [CrossRef] [Green Version]
- Zhou, S.L.; Han, P.; Wang, D.F.; Liu, Y.Y. A kind of multivariable PID design method for chaos system using H-infinity loop shaping design procedure. In Proceedings of the 2004 International Conference on Machine Learning and Cybernetics, Shanghai, China, 26–29 August 2004. [Google Scholar]
- Kojima, A.; Ichikawa, Y. H-infinity loop-shaping procedure for multiple input delay systems. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007. [Google Scholar]
- Ouddah, N.; Boukhnifer, M.; Chaibet, A.; Monmasson, E. Fixed structure H-infinity loop shaping control of switched reluctance motor for electrical vehicle. Math. Comput. Simul. 2016, 130, 124–141. [Google Scholar] [CrossRef]
- Iqbal, S.; Bhatti, A.I.; Akhtar, M.; Ullah, S. Design and robustness evaluation of an H-infinity loop shaping controller for a 2DOF stabilized platform. In Proceedings of the 2007 European Control Conference (ECC), Kos, Greece, 2–5 July 2007. [Google Scholar]
- Boeren, F.; van Herpen, R.; Oomen, T.; van de Wal, M.; Bosgra, O. Enhancing performance through multivariable weighting function design in H-infinity loop-shaping with application to a motion system. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013. [Google Scholar]
- Phurahong, N.; Kaitwanidvilai, S.; Ngaopitakkul, A. Fixed Structure Robust 2DOF H-infinity Loop Shaping Control for ACMC Buck Converter using Genetic Algorithm. In Proceedings of the International Multiconference of Engineers and Computer Scientist 2012, Hong Kong, China, 14–16 March 2012. [Google Scholar]
- Boukhnifer, M.; Ferreira, A. H-infinity Loop Shaping for Stabilization and Robustness of a Tele-Micromanipulation System. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005. [Google Scholar]
- Osinuga, M.; Patra, S.; Lanzon, A. Weight optimization for maximizing robust performance in H-infinity loop-shaping design. IFAC Proc. Vol. 2011, 44, 10135–10140. [Google Scholar] [CrossRef]
- Formentin, S.; Karimi, A.; Savaresi, S.M. Direct data-driven H2-H-infinity loop-shaping. IFAC Proc. Vol. 2011, 44, 11423–11428. [Google Scholar] [CrossRef] [Green Version]
- Prempain, E. Gain-Scheduling H-infinity Loop Shaping Control Of Linear Parameter-Varying Systems. IFAC Proc. Vol. 2006, 39, 215–219. [Google Scholar] [CrossRef]
- Lee, C.F.; Khong, S.Z.; Frisk, E.; Krysander, M. An extremum seeking approach to parameterised loop-shaping control design. IFAC Proc. Vol. 2014, 47, 10251–10256. [Google Scholar] [CrossRef]
- Suh, B.; Yun, S.; Yang, J. A New Loop-Shaping Procedure for Tuning LQ-PID Regulator. IFAC Proc. Vol. 2003, 36, 271–276. [Google Scholar] [CrossRef]
- Freitag, E.; Busam, R. Complex Analysis; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Iapichino, L.; Quarteroni, A.; Rozza, G. Reduced basis method and domain decomposition for elliptic problems in networks and complex parametrized geometries. Comput. Math. Appl. 2016, 71, 408–430. [Google Scholar] [CrossRef]
- Siegl, P.; Štampach, F. On extremal properties of Jacobian elliptic functions with complex modulus. J. Math. Anal. Appl. 2016, 442, 627–641. [Google Scholar] [CrossRef] [Green Version]
- Azar, A.T.; Serrano, F.E. Robust IMC–PID tuning for cascade control systems with gain and phase margin specifications. Neural Comput. Appl. 2014, 25, 983–995. [Google Scholar] [CrossRef]
- Armana, C.; Wei, F.T. Sturm-type bounds for modular forms over function fields. J. Number Theory 2020. [Google Scholar] [CrossRef]
- Choie, Y. Periods of Hilbert modular forms, Kronecker series and cohomology. Adv. Math. 2021, 381, 107617. [Google Scholar] [CrossRef]
- Wang, G.; Zhang, X.; Chu, Y. Inequalities for the generalized elliptic integrals and modular functions. J. Math. Anal. Appl. 2007, 331, 1275–1283. [Google Scholar] [CrossRef] [Green Version]
- Virdol, C. Potential modularity for elliptic curves and some applications. J. Number Theory 2009, 129, 3109–3114. [Google Scholar] [CrossRef] [Green Version]
- Winding, J. Multiple elliptic gamma functions associated to cones. Adv. Math. 2018, 325, 56–86. [Google Scholar] [CrossRef] [Green Version]
- Ibraheem, G.A.R.; Azar, A.T.; Ibraheem, I.K.; Humaidi, A.J. A Novel Design of a Neural Network-Based Fractional PID Controller for Mobile Robots Using Hybridized Fruit Fly and Particle Swarm Optimization. Complexity 2020, 2020, 1–18. [Google Scholar] [CrossRef]
- Pilla, R.; Botcha, N.; Gorripotu, T.S.; Azar, A.T. Fuzzy PID Controller for Automatic Generation Control of Interconnected Power System Tuned by Glow-Worm Swarm Optimization. In Applications of Robotics in Industry Using Advanced Mechanisms; Nayak, J., Balas, V.E., Favorskaya, M.N., Choudhury, B.B., Rao, S.K.M., Naik, B., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 140–149. [Google Scholar]
- Soliman, M.; Azar, A.T.; Saleh, M.A.; Ammar, H.H. Path Planning Control for 3-Omni Fighting Robot Using PID and Fuzzy Logic Controller. In Proceedings of the International Conference on Advanced Machine Learning Technologies and Applications (AMLTA2019), Jaipur, India, 13–15 February 2020; pp. 442–452. [Google Scholar]
- Ammar, H.H.; Azar, A.T. Robust Path Tracking of Mobile Robot Using Fractional Order PID Controller. In Proceedings of the International Conference on Advanced Machine Learning Technologies and Applications (AMLTA2019), Jaipur, India, 13–15 February 2020; Volume 921, pp. 370–381. [Google Scholar]
- Sallam, O.K.; Azar, A.T.; Guaily, A.; Ammar, H.H. Tuning of PID Controller Using Particle Swarm Optimization for Cross Flow Heat Exchanger Based on CFD System Identification. In Proceedings of the International Conference on Advanced Intelligent Systems and Informatics 2019, Cairo, Egypt, 19–21 October 2020; Volume 1058, pp. 300–312. [Google Scholar]
- Díaz, J.M.; Dormido, S.; Costa-Castelló, R. The use of interactivity in the controller design: Loop shaping versus closed-loop shaping. IFAC-PapersOnLine 2018, 51, 334–339. [Google Scholar] [CrossRef]
- da Silva, L.R.; Flesch, R.C.C.; Normey-Rico, J.E. Controlling industrial dead-time systems: When to use a PID or an advanced controller. ISA Trans. 2020, 99, 339–350. [Google Scholar] [CrossRef] [PubMed]
- Anwar, M.N.; Pan, S. Synthesis of the PID controller using desired closed-loop response. IFAC Proc. Vol. 2013, 46, 385–390. [Google Scholar] [CrossRef] [Green Version]
- Barros, C.P.B.; Barros, P.R.; da Rocha Neto, J.S. Loop Shaping for PID Controller Design Based on Time and Frequency Specifications. IFAC-PapersOnLine 2018, 51, 592–597. [Google Scholar]
- Skogestad, S. A procedure for siso controllability analysis: With application to design of pH processes. In Integration of Process Design and Control; Zafiriou, E., Ed.; Pergamon: Oxford, UK, 1994; pp. 25–30. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azar, A.T.; Serrano, F.E.; Kamal, N.A. Robust H∞ Loop Shaping Controller Synthesis for SISO Systems by Complex Modular Functions. Math. Comput. Appl. 2021, 26, 21. https://doi.org/10.3390/mca26010021
Azar AT, Serrano FE, Kamal NA. Robust H∞ Loop Shaping Controller Synthesis for SISO Systems by Complex Modular Functions. Mathematical and Computational Applications. 2021; 26(1):21. https://doi.org/10.3390/mca26010021
Chicago/Turabian StyleAzar, Ahmad Taher, Fernando E. Serrano, and Nashwa Ahmad Kamal. 2021. "Robust H∞ Loop Shaping Controller Synthesis for SISO Systems by Complex Modular Functions" Mathematical and Computational Applications 26, no. 1: 21. https://doi.org/10.3390/mca26010021
APA StyleAzar, A. T., Serrano, F. E., & Kamal, N. A. (2021). Robust H∞ Loop Shaping Controller Synthesis for SISO Systems by Complex Modular Functions. Mathematical and Computational Applications, 26(1), 21. https://doi.org/10.3390/mca26010021