

The Modification of the Dynamic Behaviour of the Cyclonic Flow in a Hydrocyclone under Surging Conditions



Abstract
:1. Introduction
2. Materials and Methods
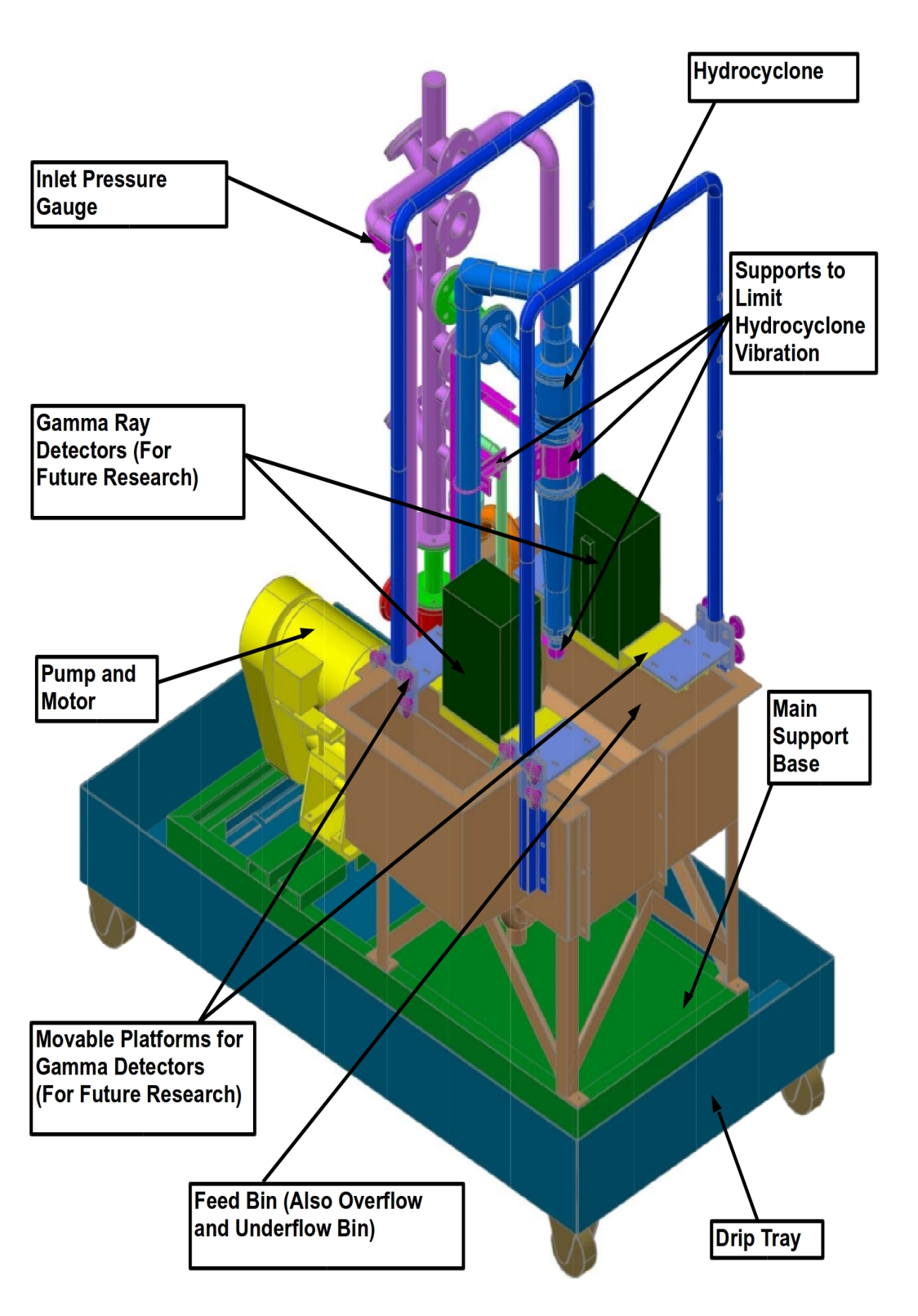
2.1. Experimental Setup and Results
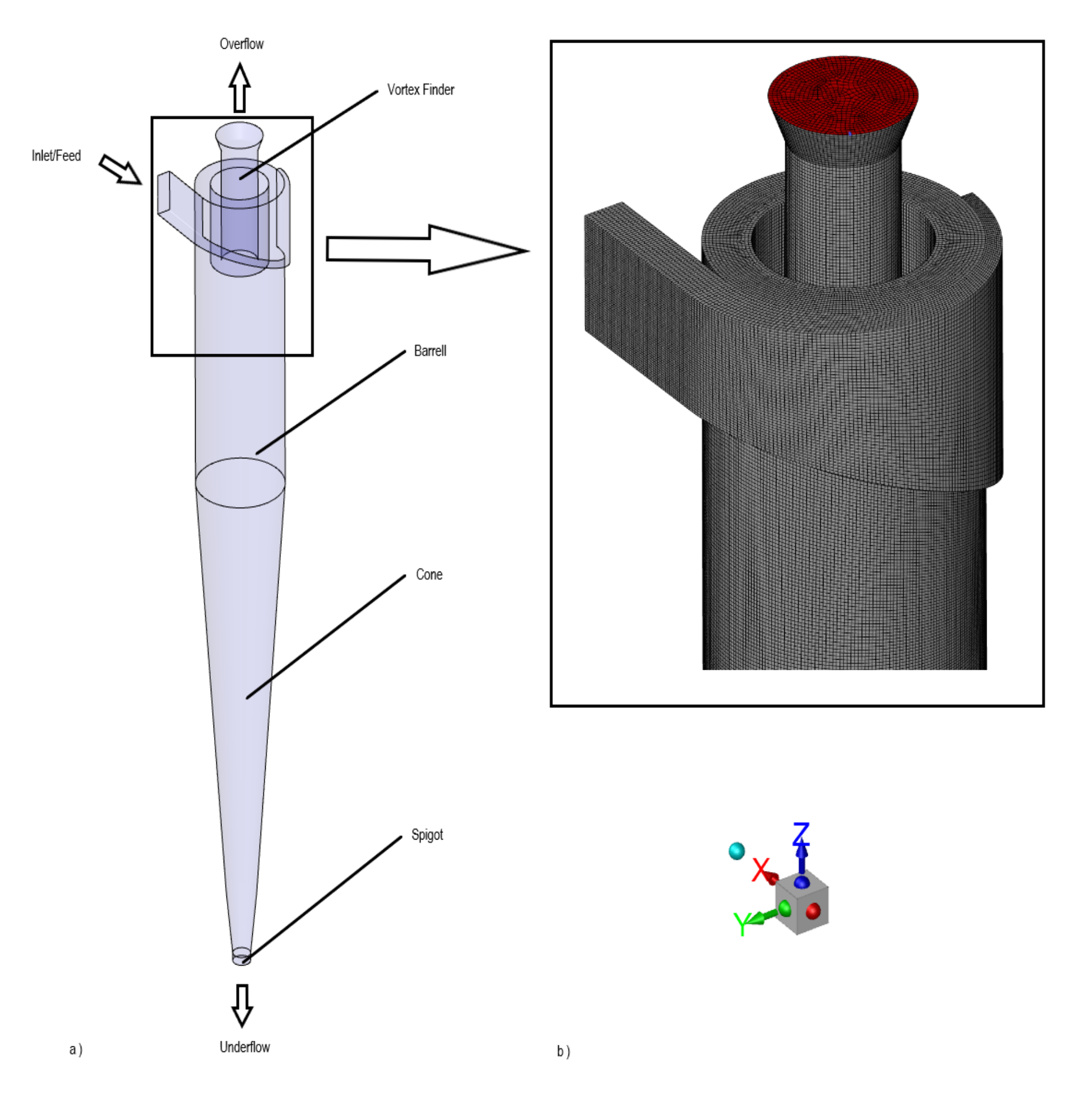
2.2. Model Geometry and Mesh
2.3. Governing Equations
2.3.1. Conservation of Mass, Conservation of Momentum, and Turbulence
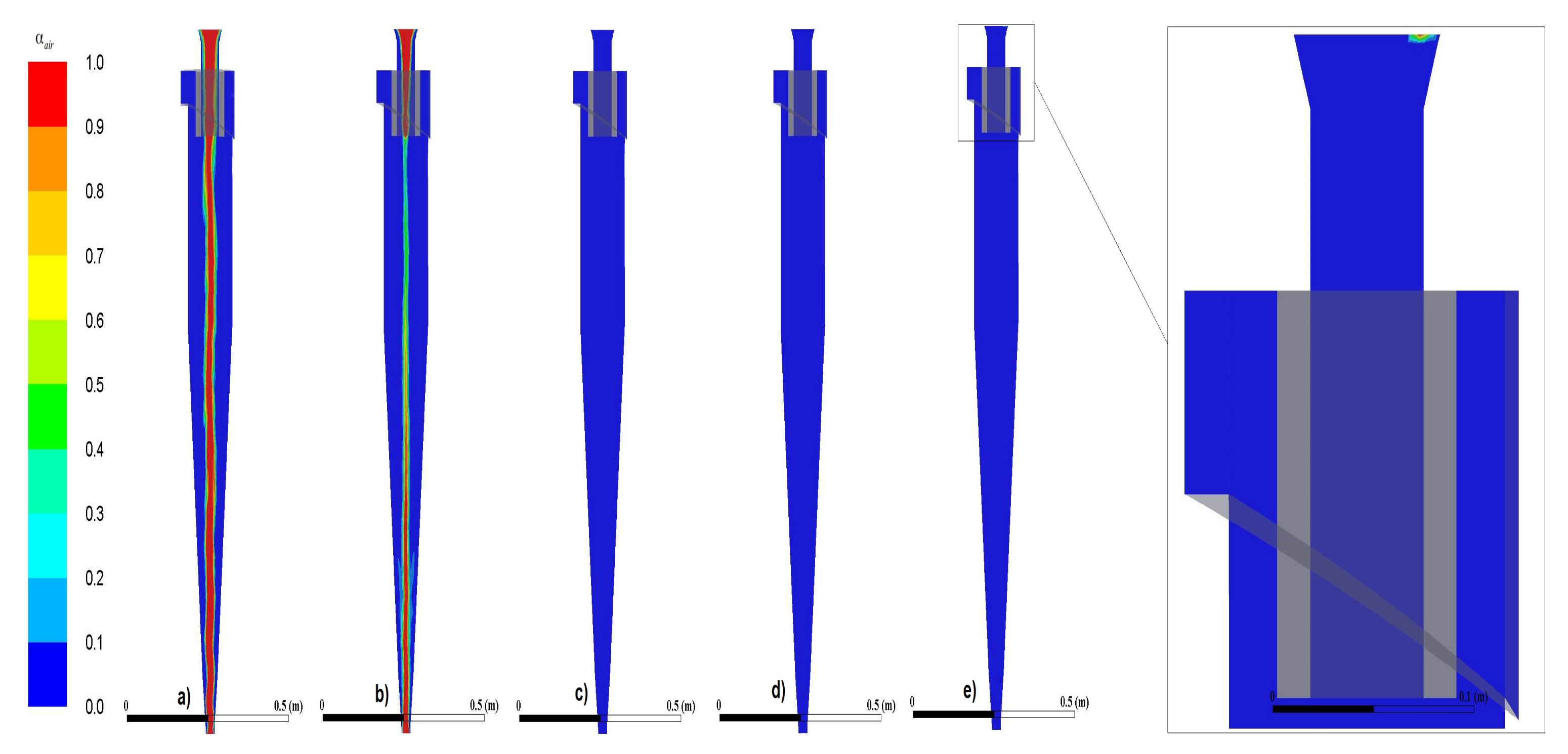
2.3.2. Volume-of-Fluid Model for Air-Core Formation
2.3.3. Discrete Element Method for Particle Interactions
2.3.4. Boundary Conditions
2.4. Solver Setup
3. Results and Discussion
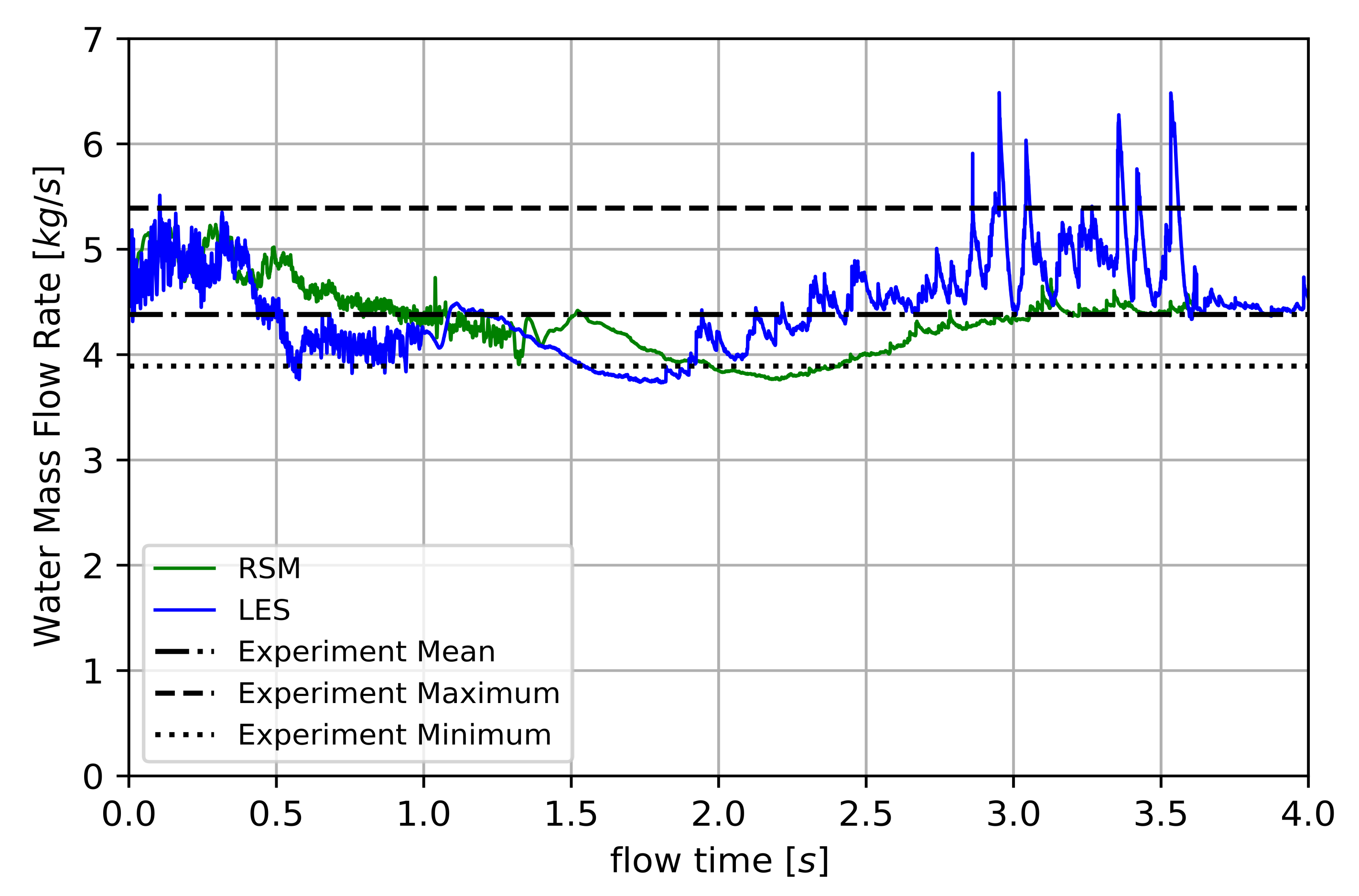
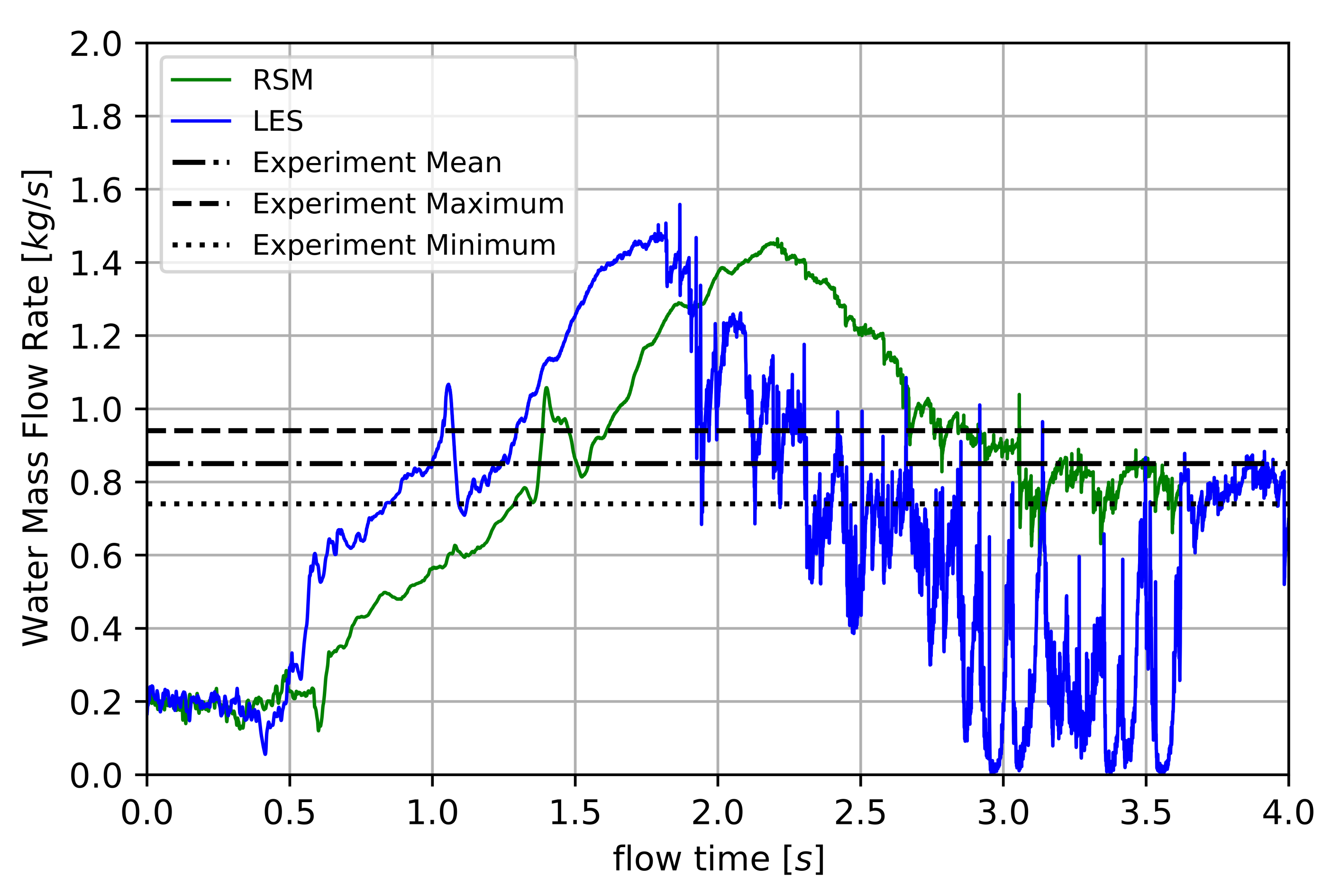
3.1. Model Validation
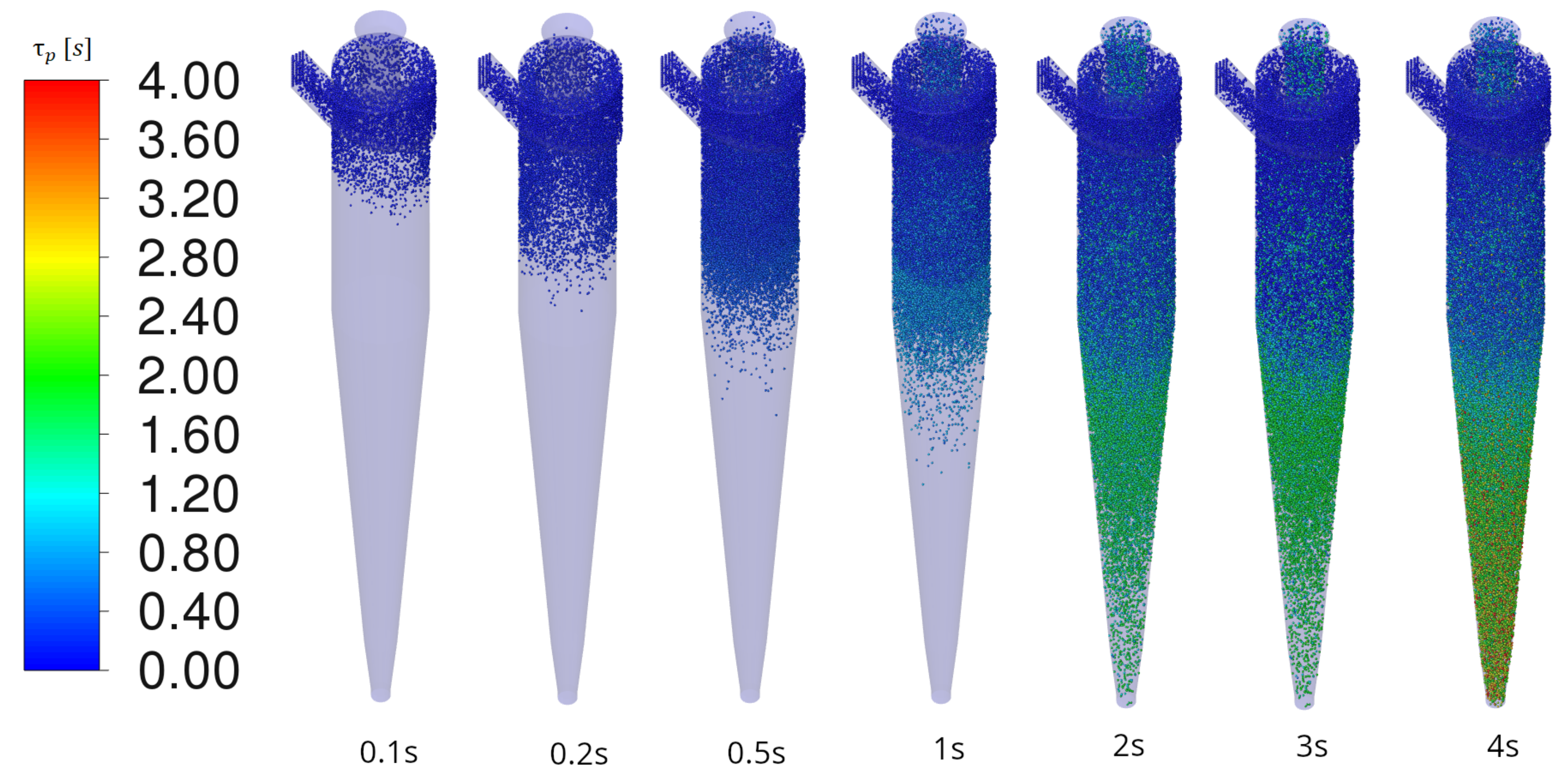
3.2. Modification of the Dynamics of the Cyclonic Flow Due to Surging
4. Conclusions
- The incorporation of more granular interactions via a Dense Discrete Phase Model, namely: solid shear-stress, turbulence dispersion, granular temperature, and solid pressure.
- To model larger flow times so as to capture the transient flow effects to understand the dynamics related to the potential recovery from surging and the possible/subsequent re-formation of the air-core.
- Use the understanding of the effect of surging on hydrocyclone performance to improve hydrocyclone design and operating conditions so as to operate a hydrocyclone at the highest possible feed rate without the occurrence of surging.
- It would be a valuable study to use CFD to determine the impact of contact angle (for various materials) on air-core dynamics and overall hydrocyclone dynamics and/or performance.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations and Nomenclature
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| DOAJ | Directory of open access journals |
| DMC | Dense medium cyclone |
| CFD | Computational fluid dynamics |
| CGD | Computational granular dynamics |
| DEM | Discrete element method |
| VOF | Volume-Of-Fluid |
| RSM | Reynold’s Stress Model |
| LES | Large Eddy Simulation |
| SGS | Sub-grid scale |
| PSD | Particle size distribution |
| RANS | Reynold’s Averaged Navier–Stokes |
| CSS | Continuum Surface Stress |
| DPM | Discrete phase model |
| QUICK | Quadratic Upstream Interpolation for Convective Kinematics |
| PU | Polyurethane |
| NRF | National Research Foundation |
| NGS | Next-Generation Scholarship |
Nomenclature
| Spherical drag law coefficient constants | |
| Body force components | |
| Drag coefficient | |
| Transport of the Reynolds stresses by convection | |
| Smagorinsky constant | |
| Virtual mass factor | |
| D | Diameter |
| Hydraulic diameter, | |
| Transport of the Reynolds stresses by molecular diffusion | |
| Transport of the Reynolds stresses by turbulent diffusion | |
| d | Diameter, |
| Mean diameter, | |
| Euler Number, | |
| Unit distance vector from particle i to particle j, | |
| Surface tension force, | |
| Friction force, | |
| Transport of the Reynolds stresses by production by system rotation | |
| Force exerted on particle i by particle j, | |
| Other particle interaction forces, | |
| , | Transport of the Reynolds stresses by buoyancy production |
| Gravitational vector, | |
| H | Hydrocyclone height, |
| Turbulence intensity, % | |
| I | Unit tensor |
| K | Spring constant, |
| k | Turbulence kinetic energy, |
| Mixing length | |
| Turbulent Mach Number | |
| m | Mass, |
| Mass-flow rate, | |
| N | Number of discrete size bins |
| n | Rosin–Rammler distribution spread parameter |
| Unit surface normal vector | |
| Volume fraction gradient | |
| Unit normal vector at the wall | |
| P | Pressure, |
| Pressure drop, | |
| , | Transport of the Reynolds stresses by stress production |
| Mean pressure, | |
| r | Radius, |
| Reynolds Number | |
| Strain-rate tensor | |
| Tensor norm of strain-rate tensor | |
| Rate-of-strain tensor for the resolved scale | |
| Momentum source term | |
| Turbulence kinetic energy source term | |
| Reynolds stresses source term | |
| t | Time, |
| Unit tangential vector at the wall | |
| Time step size, | |
| Mean velocity vector, | |
| , , | Mean velocity components , |
| Velocity vector, | |
| Velocity vector magnitude, | |
| Wall velocity vector, | |
| , , | Fluctuating velocity components , |
| , , | Instantaneous velocity components , |
| , , | Average fluctuating velocity components , |
| Computational cell volume, | |
| u | Speed, |
| Relative velocity of arbitrary particles i and j, | |
| Tangential velocity, | |
| Cartesian co-ordinates, | |
| , , | Cartesian directions , |
| Position of particle i, | |
| Mass fraction of particles with diameter greater than d | |
| Zero vector |
| Greek Symbols | |
| Volume fraction | |
| Damping coefficient, | |
| Particle overlap due to collision, | |
| Kronecker Delta | |
| Turbulence dissipation rate, | |
| Transport of the Reynolds stresses by dissipation | |
| A normally distributed random number | |
| Contact angle at the wall | |
| von Kármán constant | |
| Viscosity, | |
| Surface friction coefficient | |
| Turbulent (eddy) viscosity, | |
| Kinematic viscosity, | |
| Subgrid-scale eddy viscosity, | |
| Reynolds stresses (tensor notation), | |
| Density, | |
| Surface tension coefficient, | |
| Stress tensor due to molecular viscosity, | |
| Turbulent Prandtl Number for k | |
| Filtered sub-grid scale stress tensor, | |
| Particle residence time, | |
| Transport of the Reynolds stresses by pressure strain | |
| Subscripts | |
| Air | |
| Average | |
| Experiment | |
| Maximum | |
| Minimum | |
| Overflow | |
| p | Particles or solids |
| Underflow | |
References
- Narasimha, M.; Brennan, M.S.; Holtham, P.N. CFD modeling of hydrocyclones: Prediction of particle size segregation. Miner. Eng. 2012, 39, 173–183. [Google Scholar] [CrossRef]
- Delgadillo, J.A.; Rajamani, R.K. Computational fluid dynamics prediction of the air-core in hydrocyclones. Int. J. Comput. Fluid Dyn. 2009, 23, 189–197. [Google Scholar] [CrossRef]
- Narasimha, M.; Brennan, M.S.; Holtham, P.N.; Napier-Munn, T.J. A comprehensive CFD model of dense medium cyclone performance. Miner. Eng. 2007, 20, 414–426. [Google Scholar] [CrossRef]
- Bing, L.; Luncao, L.; Huajian, W.; Zhenjiang, Z.; Yaoguang, Q. Numerical simulation and experimental study on internal and external characteristics of novel hydrocyclones. Heat Mass Transf. 2020, 56, 1875–1887. [Google Scholar] [CrossRef]
- Chu, K.W.; Wang, B.; Yu, A.B.; Vince, A. CFD-DEM modelling of multiphase flow in dense medium cyclones. Powder Technol. 2009, 193, 235–247. [Google Scholar] [CrossRef]
- Wang, B.; Chu, K.W.; Yu, A.B.; Vince, A. Modeling the multiphase flow in a dense medium cyclone. Ind. Eng. Chem. Res. 2009, 48, 3628–3639. [Google Scholar] [CrossRef]
- Chu, K.; Chen, J.; Yu, A. Applicability of a coarse-grained CFD-DEM model on dense medium cyclone. Miner. Eng. 2016, 90, 43–54. [Google Scholar] [CrossRef]
- Ji, L.; Kuang, S.; Qi, Z.; Wang, Y.; Chen, J.; Yu, A. Computational analysis and optimization of hydrocyclone size to mitigate adverse effect of particle density. Sep. Purif. Technol. 2017, 174, 251–263. [Google Scholar] [CrossRef]
- Safikhani, H.; Zamani, J.; Musa, M. Numerical study of flow field in new design cyclone separators with one, two and three tangential inlets. Adv. Powder Technol. 2018, 29, 611–622. [Google Scholar] [CrossRef]
- Wang, S.; Li, H.; Wang, R.; Wang, X.; Tian, R.; Sun, Q. Effect of the inlet angle on the performance of a cyclone separator using CFD-DEM. Adv. Powder Technol. 2019, 30, 227–239. [Google Scholar] [CrossRef]
- Wei, Q.; Sun, G.; Gao, C. Numerical analysis of axial gas flow in cyclone separators with different vortex finder diameters and inlet dimensions. Powder Technol. 2020, 369, 321–333. [Google Scholar] [CrossRef]
- Brar, L.S.; Elsayed, K. Analysis and optimization of cyclone separators with eccentric vortex finders using large eddy simulation and artificial neural network. Sep. Purif. Technol. 2018, 207, 269–283. [Google Scholar] [CrossRef]
- Zhang, Z.W.; Li, Q.; Zhang, Y.H.; Wang, H.L. Simulation and experimental study of effect of vortex finder structural parameters on cyclone separator performance. Sep. Purif. Technol. 2022, 286, 120394. [Google Scholar] [CrossRef]
- Brar, L.S.; Derksen, J. Revealing the details of vortex core precession in cyclones by means of large-eddy simulation. Chem. Eng. Res. Des. 2020, 159, 339–352. [Google Scholar] [CrossRef]
- Chu, K.W.; Wang, B.; Xu, D.L.; Chen, Y.X.; Yu, A.B. CFD-DEM simulation of the gas-solid flow in a cyclone separator. Chem. Eng. Sci. 2011, 66, 834–847. [Google Scholar] [CrossRef]
- Chiang, S.H.; He, D.; Feng, Y. Liquid—Solids Separation. In Handbook of Fluidization and Fluid-Particle Systems, 1st ed.; Yang, W.C., Ed.; Marcel Dekker, Inc.: New York, NY, USA, 2003; Chapter 28. [Google Scholar]
- Narasimha, M.; Brennan, M.; Holtham, P.N. Large eddy simulation of hydrocyclone-prediction of air-core diameter and shape. Int. J. Miner. Process. 2006, 80, 1–14. [Google Scholar]
- Davailles, A.; Climent, E.; Bourgeois, F. Fundamental understanding of swirling flow pattern in hydrocyclones. Sep. Purif. Technol. 2012, 92, 386–400. [Google Scholar] [CrossRef] [Green Version]
- Ghodrat, M.; Qi, Z.; Kuang, S.; Ji, L.; Yu, A. Computational investigation of the effect of particle density on the multiphase flows and performance of hydrocyclone. Miner. Eng. 2016, 90, 55–69. [Google Scholar] [CrossRef]
- Ji, L.; Chu, K.; Kuang, S.; Chen, J.; Yu, A. Modeling the multiphase flow in hydrocyclones using the coarse-grained volume of fluid-discrete element method and mixture-discrete element method approaches. Ind. Eng. Chem. Res. 2018, 57, 9641–9655. [Google Scholar] [CrossRef]
- Brennan, M.; Holtham, P.; Narasimha, M. CFD modelling of cyclone separators: Validation against plant hydrodynamic performance. In Proceedings of the Seventh International Conference on CFD in the Minerals and Process Industries, Melbourne, Australia, 9–11 December 2009; Witt, P., Schwarz, M., Eds.; CSIRO: Canberra, Australia, 2009. [Google Scholar]
- Narasimha, M.; Brennan, M.S.; Holtham, P.N.; Purchase, A.; Napier-Munn, T.J. Large eddy Simulation of a dense medium cyclone—Prediction of medium segregation and coal partitioning. In Proceedings of the Fifth International Conference on CFD in the Minerals and Process Industries, Melbourne, Australia, 13–15 December 2006; CSIRO: Canberra, Australia, 2006. [Google Scholar]
- Chu, K.W.; Yu, A.B. Numerical simulation of complex particle–fluid flows. Powder Technol. 2008, 179, 104–114. [Google Scholar] [CrossRef]
- Bhamjee, M. Modelling of the Multiphase Interactions in a Hydrocyclone Using Navier-Stokes and Lattice Boltzmann Based Computational Approaches. Ph.D. Thesis, University of Johannesburg, Johannesburg, South Africa, 2016. [Google Scholar]
- Chu, K.; Chen, Y.; Ji, L.; Zhou, Z.; Yu, A.; Chen, J. Coarse-grained CFD-DEM study of gas-solid flow in gas cyclone. Chem. Eng. Sci. 2022, 260, 117906. [Google Scholar] [CrossRef]
- Patankar, S.V. Numerical Heat Transfer and Fluid Flow, 1st ed.; Hemisphere Publishing Corporation: Minneapolis, MN, USA, 1980. [Google Scholar]
- Versteeg, K.H.; Malalasekera, W. An Introduction to Computational Fluid Dynamics: The Finite Volume Method, 1st ed.; Longman Scientific and Technical: Essex, UK, 1995. [Google Scholar]
- Ansorge, R. Mathematical Models of Fluid Dynamics: Modelling, Theory, Basic Numerical Facts—An Introduction, 1st ed.; WILEY-VCH GmbH & Co. KGaA, Weinheim, Inc.: Hamburg, Germany, 2003. [Google Scholar]
- ANSYS Fluent Technical Staff. ANSYS Fluent 2021R2 Theory Guide; ANSYS Inc.: Canonsburg, PA, USA, 2021. [Google Scholar]
- Kuzmin, D. Introduction to Computational Fluid Dynamics, Lecture 1–Lecture 11. Available online: https://www.mathematik.tu-dortmund.de/~kuzmin/cfdintro/cfd.html (accessed on 12 September 2022).
- Blevins, R.D. Applied Fluid Dynamics Handbook, 1st ed.; Van Nostrand Reinhold Company, Inc.: New York, NY, USA, 1984. [Google Scholar]
- Bakker, A. Applied Computational Fluid Dynamics: Lecture 10—Turbulence Models. Available online: https://sites.icmc.usp.br/gustavo.buscaglia/cursos/mfc_undergrad1/bakker_10-rans.pdf (accessed on 12 September 2022).
- Wilcox, D.C. Turbulence Modelling for CFD, 2nd ed.; Griffin Printing, Inc.: Glendale, CA, USA, 1994. [Google Scholar]
- Bakker, A. Applied Computational Fluid Dynamics: Lecture 12—Large Eddy Simulation; Darthmouth University: Hanover, NH, USA, 2008. [Google Scholar]
- Bhamjee, M.; Connell, S.H.; Nel, A.L. The effect of surface tension on air-Core formation in a hydrocyclone. In Proceedings of the Ninth South African Conference on Computational and Applied Mechanics, SACAM 2014, Somerset West, South Africa, 14–16 January 2014; Hoffmann, J., van der Spuy, J., Eds.; SAAM: Somerset West, South Africa, 2014. [Google Scholar]
- Król, B.; Król, P. Surface free energy of polyurethane coatings with improved hydrophobicity. Colloid Polym. Sci. 2012, 290, 879–893. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Morsi, S.A.; Alexander, A.J. An investigation of particle trajectories in two-phase flow systems. J. Fluid Mech. 1972, 55, 193–208. [Google Scholar] [CrossRef]
- Cundall, P.A.; Strack, O.D.L. A discrete numerical model for granular assemblies. Géotechnique 1979, 29, 47–64. [Google Scholar] [CrossRef]
- ANSYS Fluent Technical Staff. ANSYS Fluent 2021R1 Users Guide; ANSYS Inc.: Canonsburg, PA, USA, 2021. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurement | Value |
|---|---|
| Feed Mass Flow Rate Water | 5.23 ± |
| Feed Mass Flow Rate Solids | 1.65 ± |
| Feed Water Mass Fraction | 76.05 ± |
| Feed Solids Mass Fraction | 23.95 ± |
| Overflow Mass Flow Rate Water | |
| Overflow Mass Flow Rate Solids | |
| Underflow Mass Flow Rate Water | |
| Underflow Mass Flow Rate Solids |
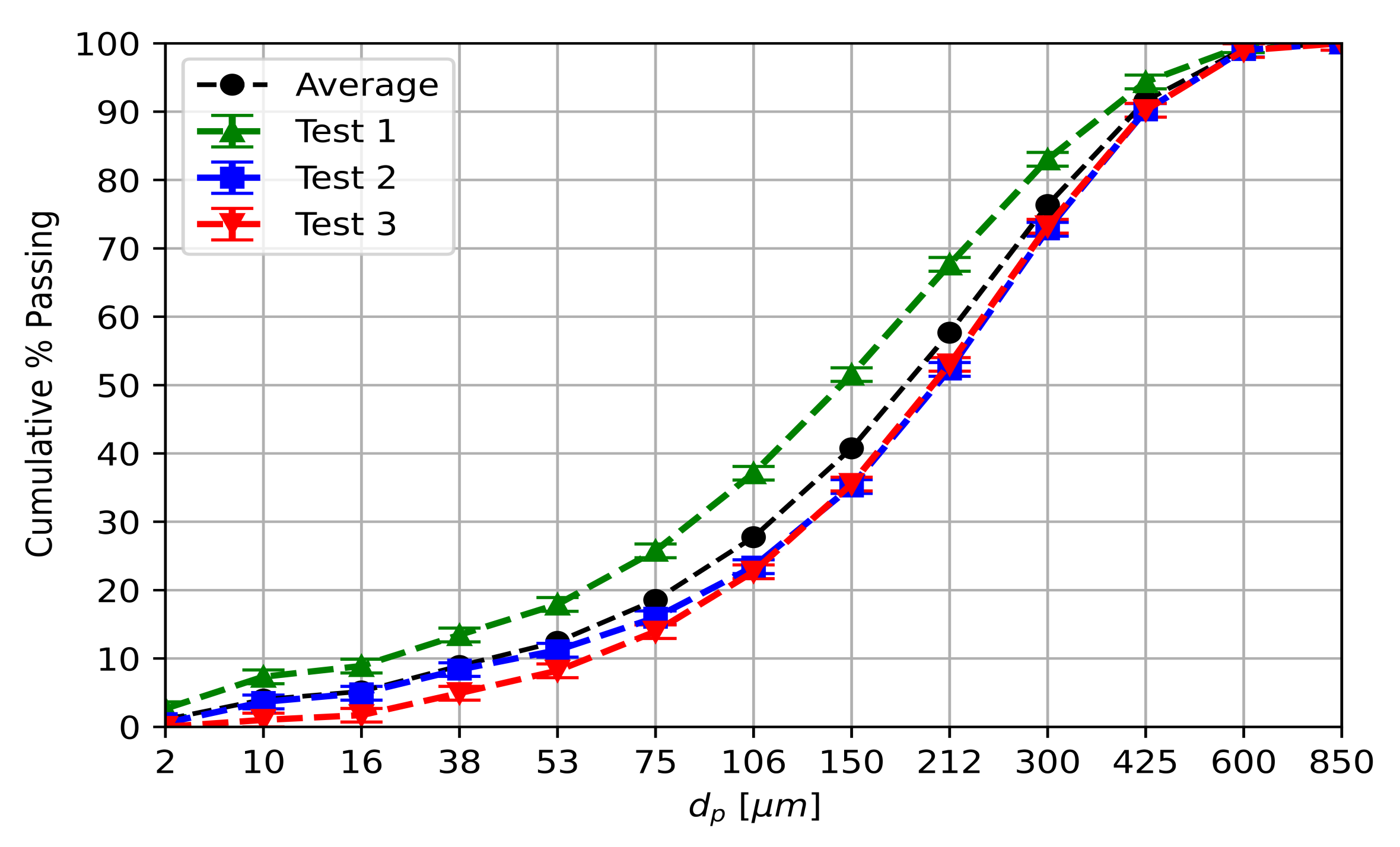
| Particles Sizes in m | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2 | 10 | 16 | 38 | 53 | 75 | 106 | 150 | 212 | 300 | 425 | 600 | 850 | |
| Sample | Percentage Mass Below Sizes—Accuracy ± 1% | ||||||||||||
| Test 1 | 2.65 | 7.32 | 8.89 | 13.44 | 17.91 | 25.75 | 37.10 | 51.53 | 67.66 | 83.03 | 94.34 | 99.63 | 100 |
| Test 2 | 0.54 | 3.64 | 4.91 | 8.37 | 11.20 | 15.97 | 23.43 | 35.16 | 52.29 | 72.79 | 90.19 | 99.01 | 100 |
| Test 3 | 0.00 | 1.00 | 1.70 | 4.92 | 8.20 | 13.93 | 22.69 | 35.52 | 53.03 | 73.23 | 90.21 | 98.94 | 100 |
| Average | 1.07 | 3.99 | 5.17 | 8.91 | 12.44 | 18.55 | 27.74 | 40.74 | 57.66 | 76.35 | 91.58 | 99.19 | 100 |
| Boundary Name | Boundary Type | Pressure (kPa) | (kg/s) | (m) | (%) | |
|---|---|---|---|---|---|---|
| Inlet | Mass-flow inlet | 150 | 0 | 6.875 ( = 5.23) | ||
| Underflow | Pressure outlet | 1 | N/A | 10 | ||
| (backflow) | ||||||
| Overflow | Pressure outlet | 1 | N/A | 10 | ||
| (backflow) |
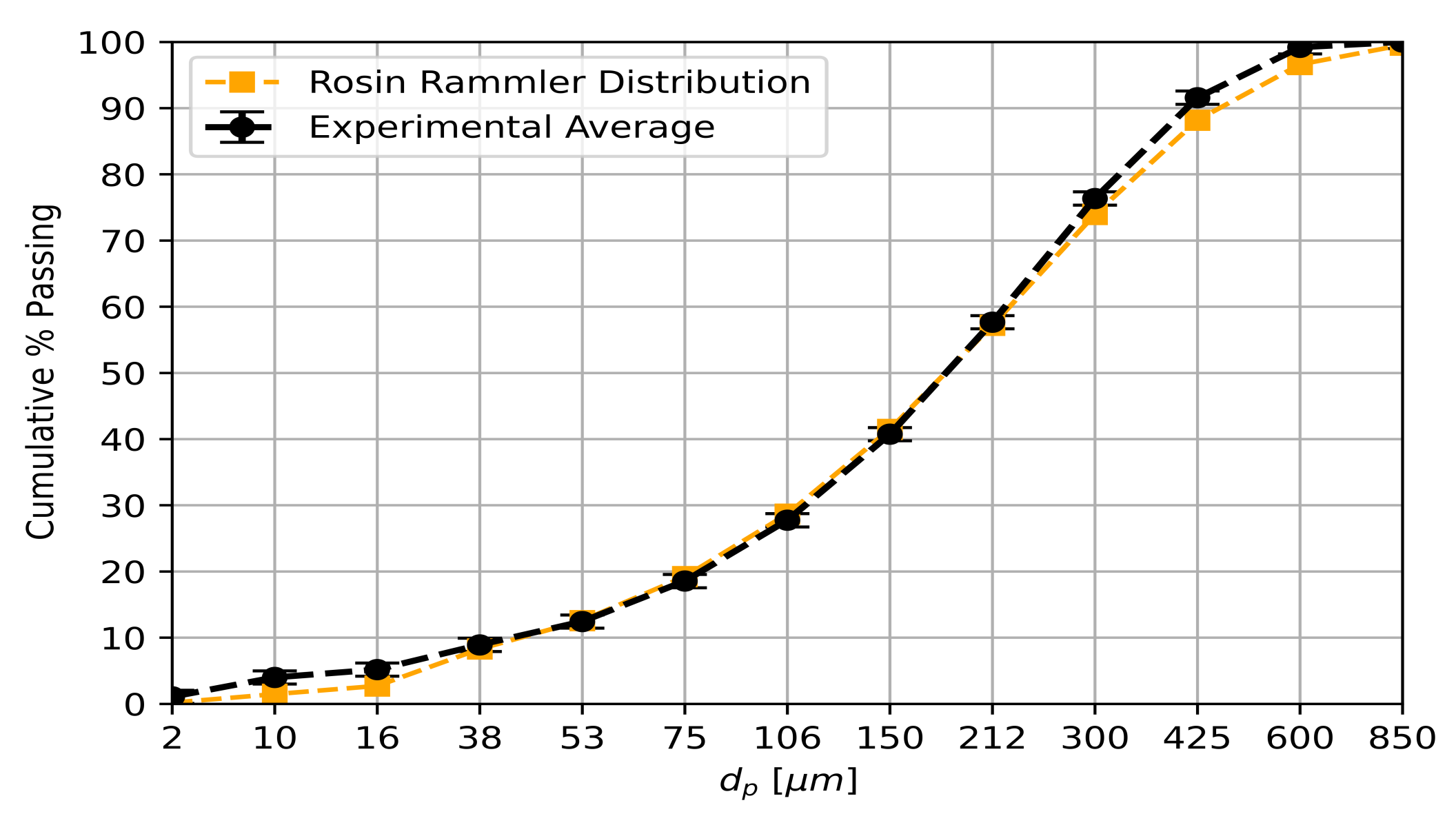
| Boundary | N | ||||
|---|---|---|---|---|---|
| Feed | 240 | 1.3285 | 2 | 850 | 13 |
| Model | (kg/s) | (kg/s) | (kg/s) | (kg/s) | (%) | (%) |
|---|---|---|---|---|---|---|
| VOF-DEM (LES) | 0.41 | 4.78 | 49 | 10 | ||
| VOF-DEM (RSM) | 0.79 | 4.44 | 7 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bhamjee, M.; Connell, S.H.; Nel, A.L. The Modification of the Dynamic Behaviour of the Cyclonic Flow in a Hydrocyclone under Surging Conditions. Math. Comput. Appl. 2022, 27, 88. https://doi.org/10.3390/mca27060088
Bhamjee M, Connell SH, Nel AL. The Modification of the Dynamic Behaviour of the Cyclonic Flow in a Hydrocyclone under Surging Conditions. Mathematical and Computational Applications. 2022; 27(6):88. https://doi.org/10.3390/mca27060088
Chicago/Turabian StyleBhamjee, Muaaz, Simon H. Connell, and André Leon Nel. 2022. "The Modification of the Dynamic Behaviour of the Cyclonic Flow in a Hydrocyclone under Surging Conditions" Mathematical and Computational Applications 27, no. 6: 88. https://doi.org/10.3390/mca27060088
APA StyleBhamjee, M., Connell, S. H., & Nel, A. L. (2022). The Modification of the Dynamic Behaviour of the Cyclonic Flow in a Hydrocyclone under Surging Conditions. Mathematical and Computational Applications, 27(6), 88. https://doi.org/10.3390/mca27060088