
An Adaptive in Space, Stabilized Finite Element Method via Residual Minimization for Linear and Nonlinear Unsteady Advection–Diffusion–Reaction Equations



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Model Problem
3. Discontinuous Galerkin-Based Time Marching Discretization
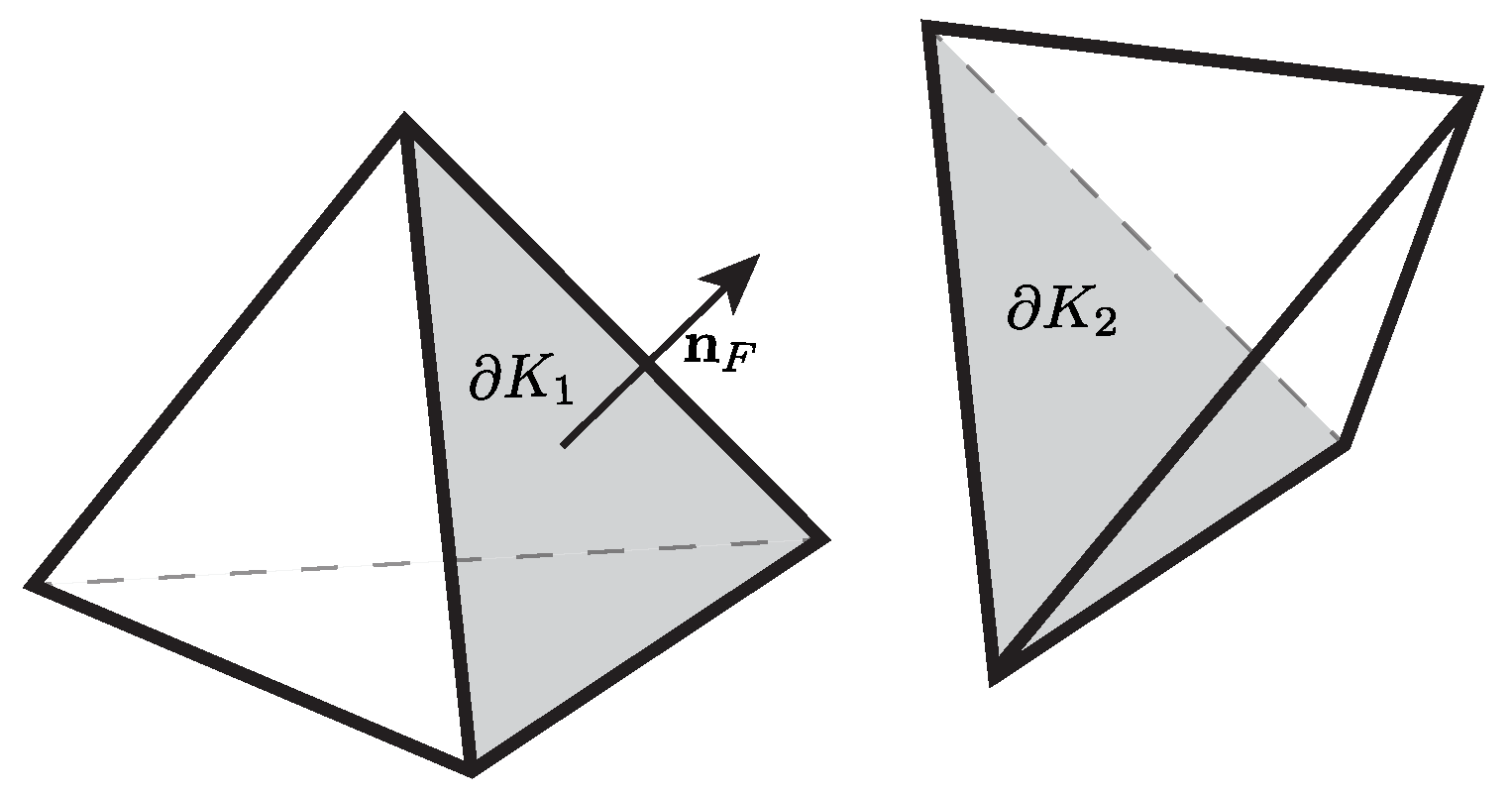
3.1. Discrete Setting
3.2. Space Semi-Discretization
- 1.
- 2.
- Boundedness: There is a constant , independent of h and τ, such that
- 3.
- Discrete inf-sup stability: There is a constant , such that
3.3. Backward Euler Time Discretization
3.4. Second-Order Backward Differencing Formula (BDF2)
4. Fully Discrete Residual Minimization
Adaptive Mesh Refinement
| Algorithm 1 Marking strategy |
Input:
|
| Algorithm 2 Algorithm for BDF1 |
Input:
|
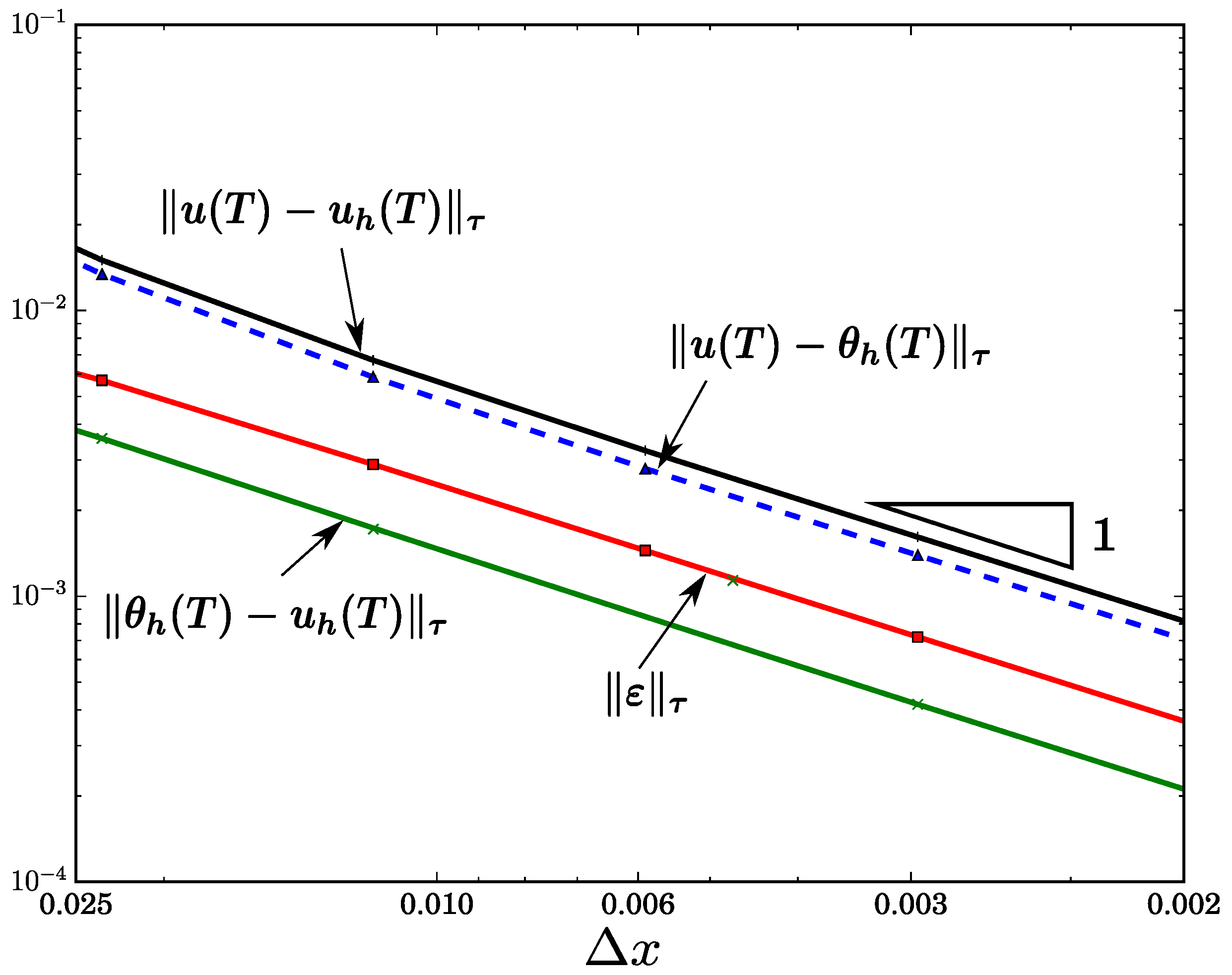
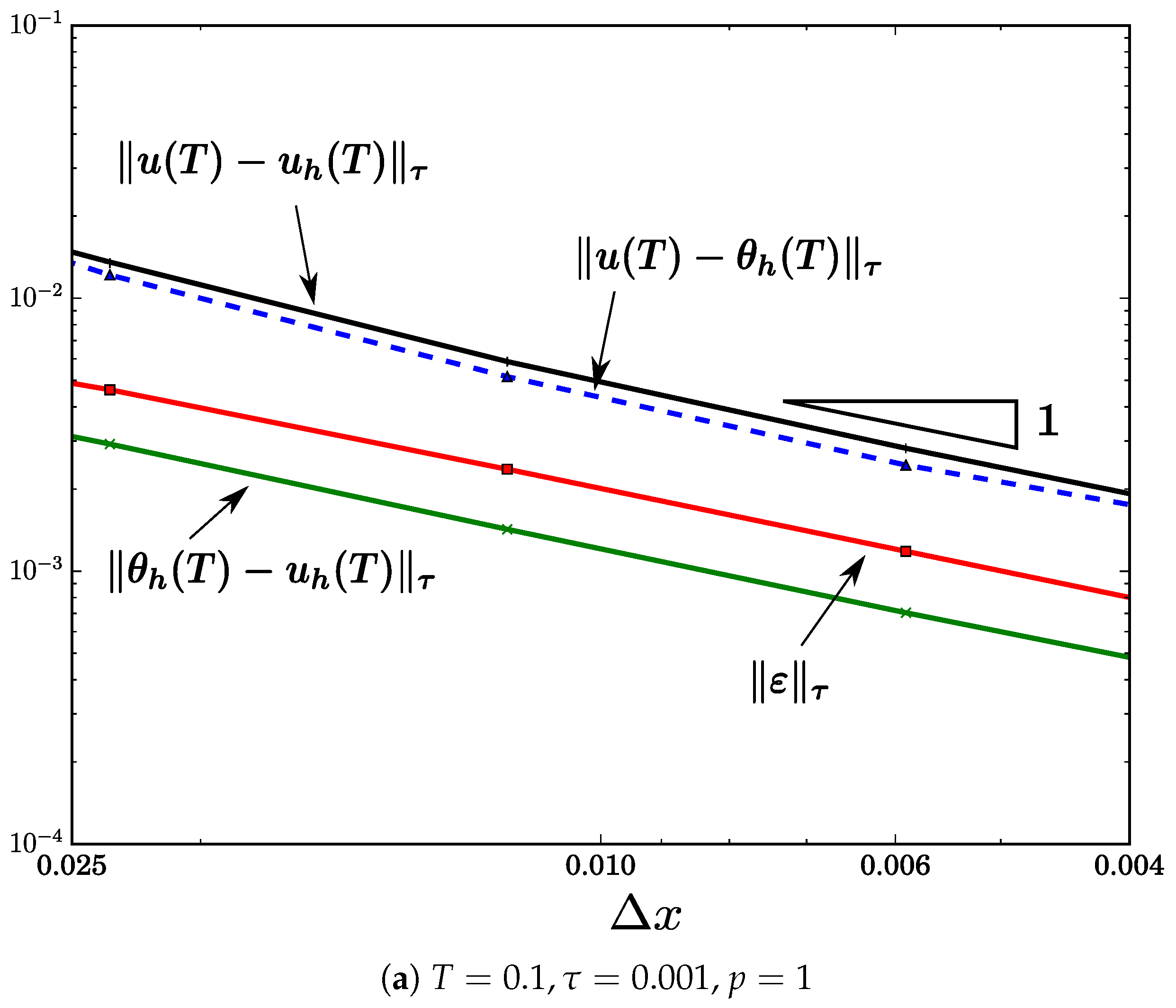
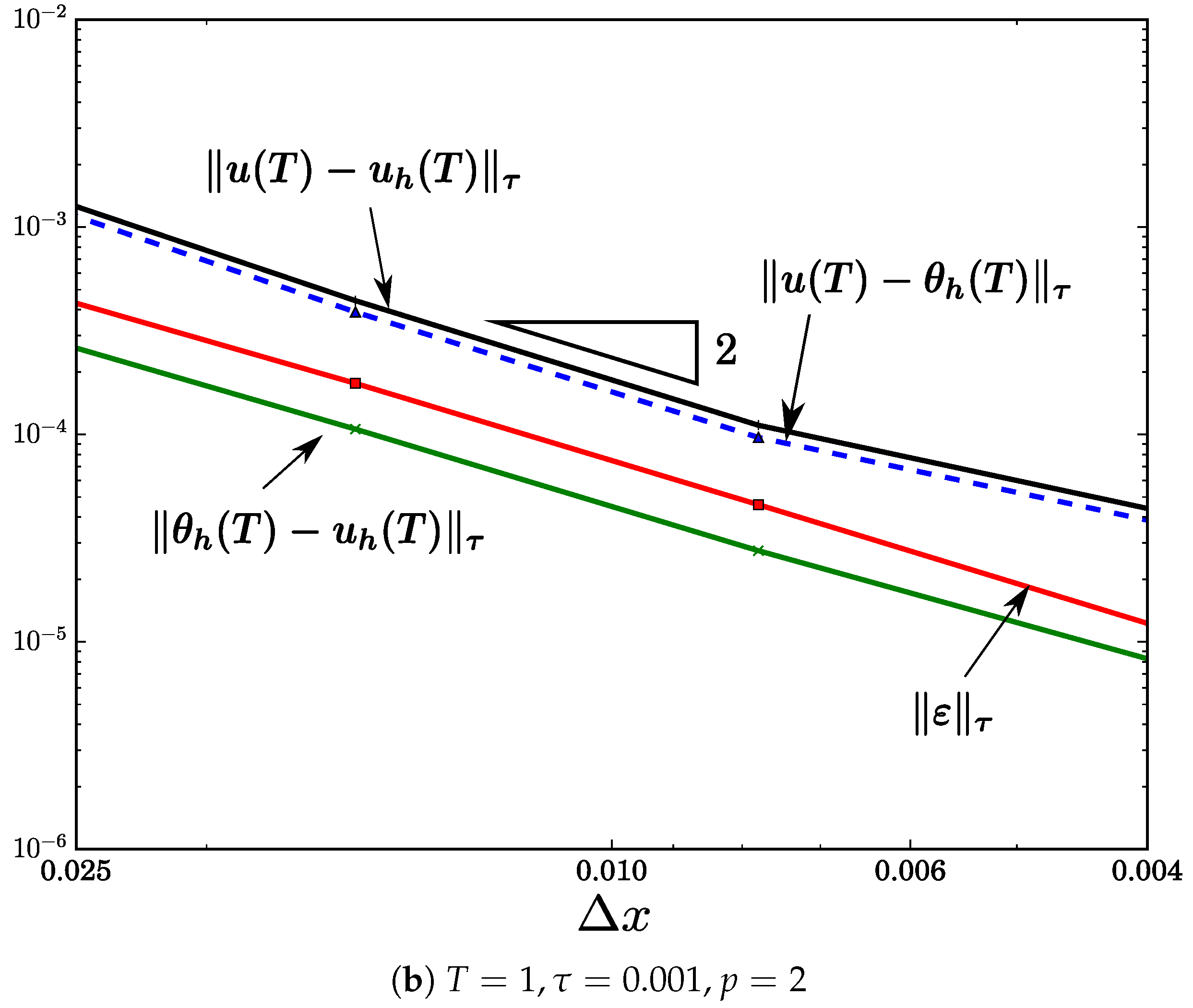
5. Numerical Examples
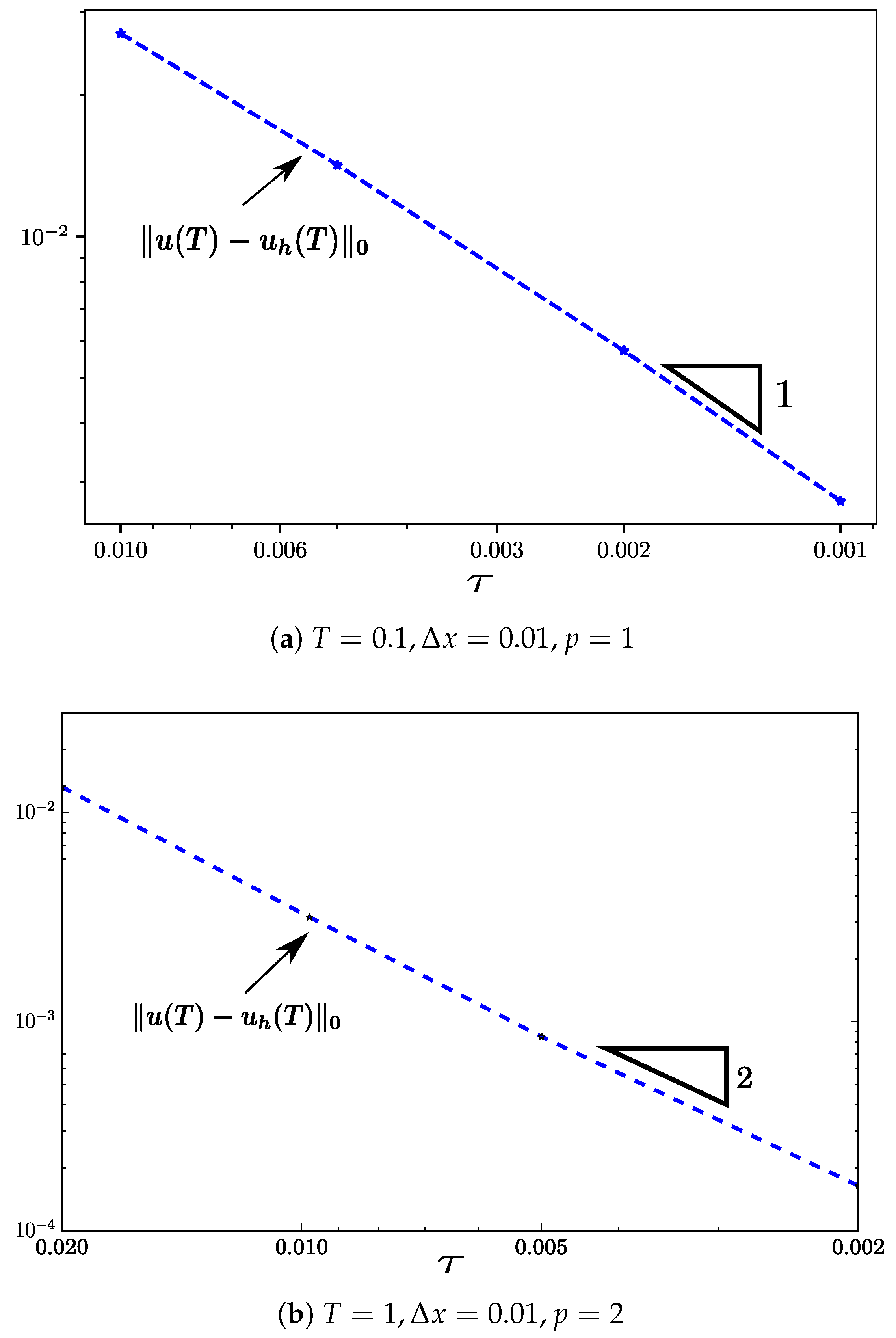
5.1. Heat Equation (2D)
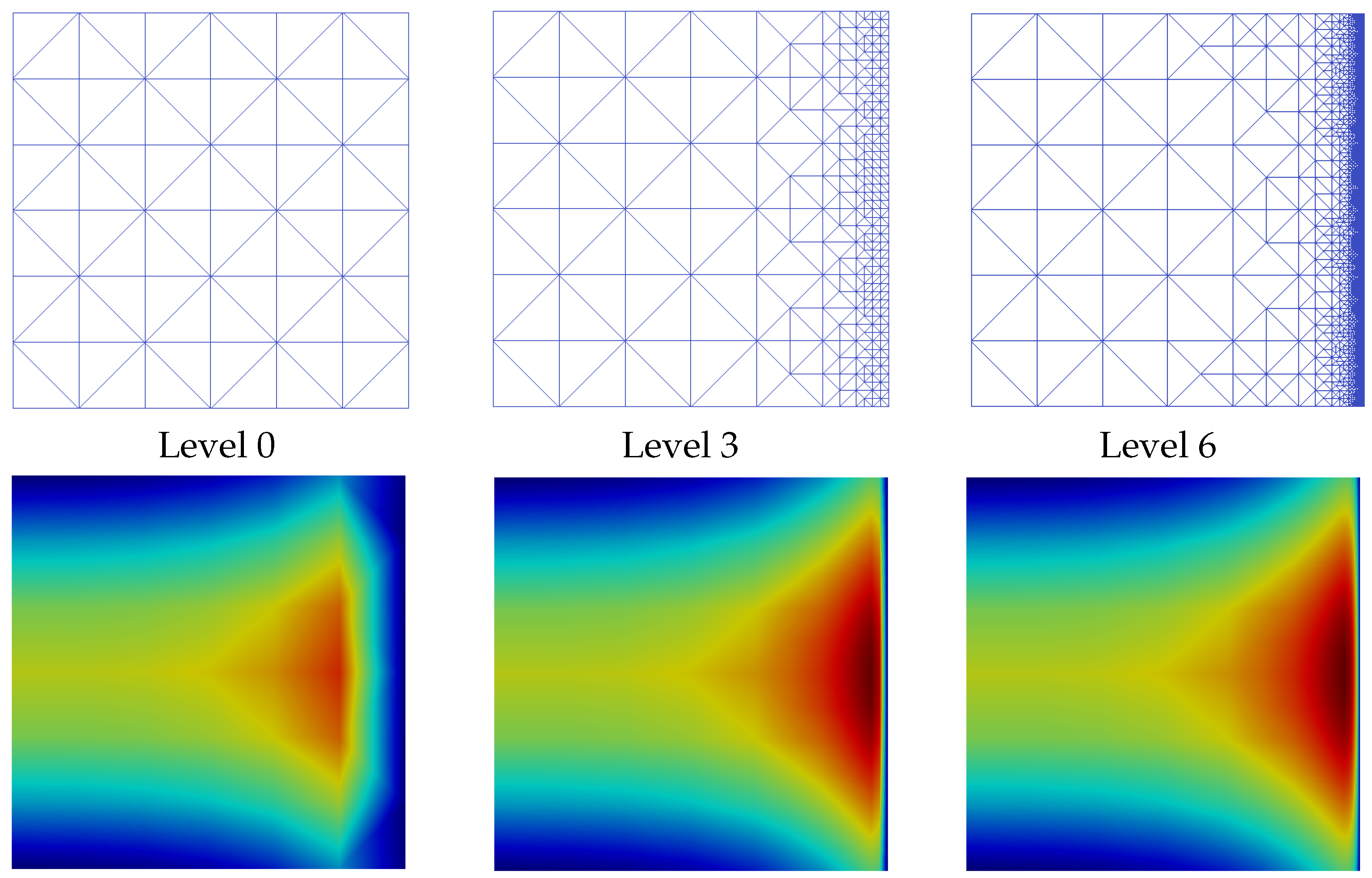
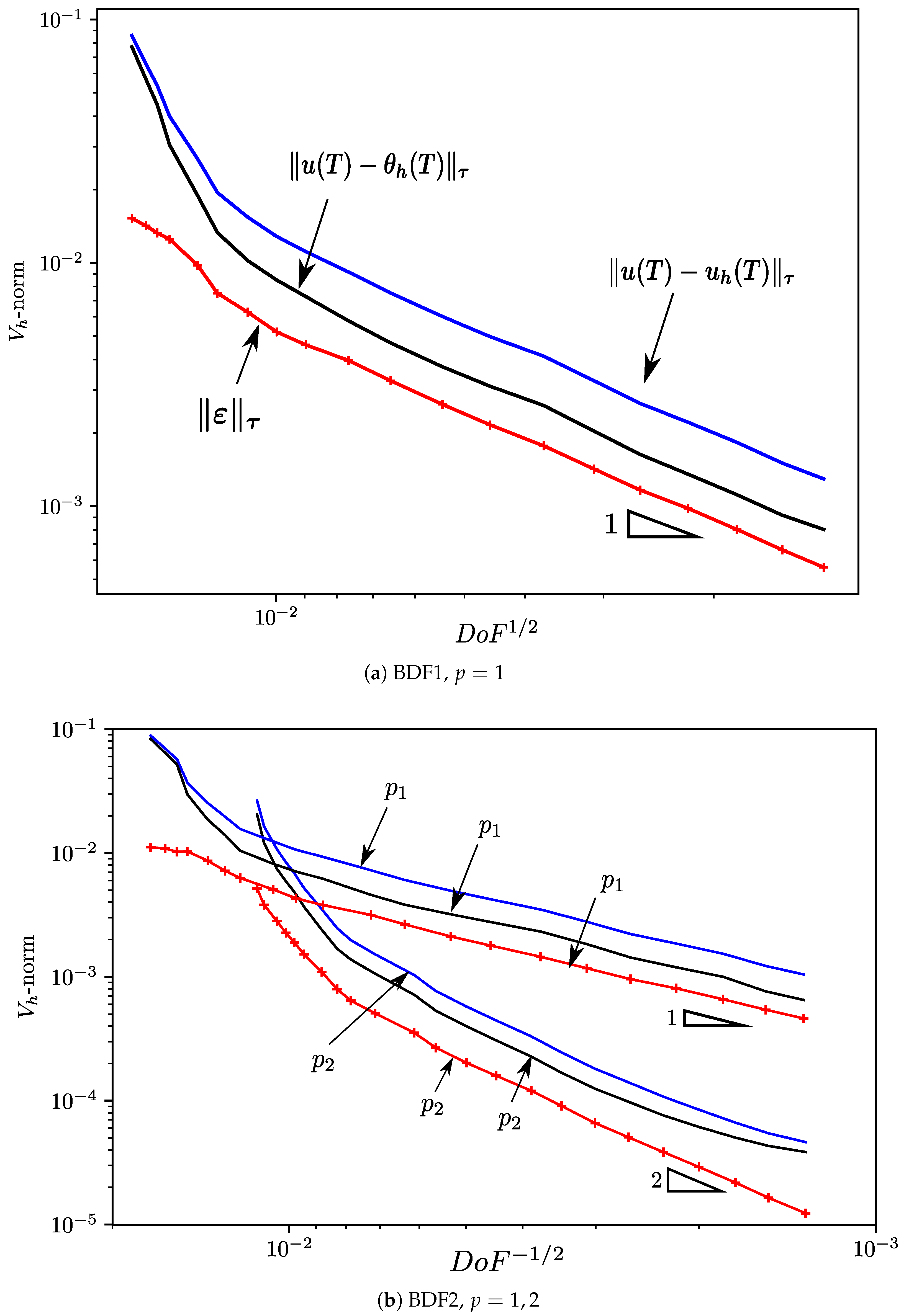
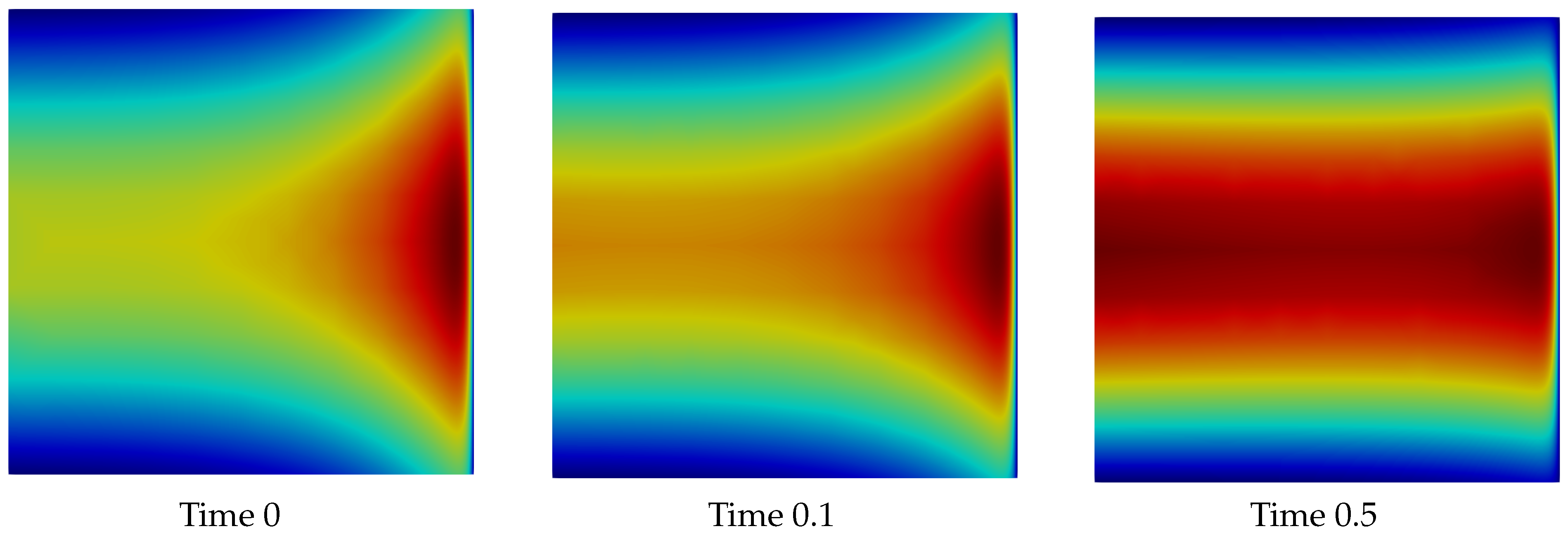
5.2. Advection–Diffusion Problem
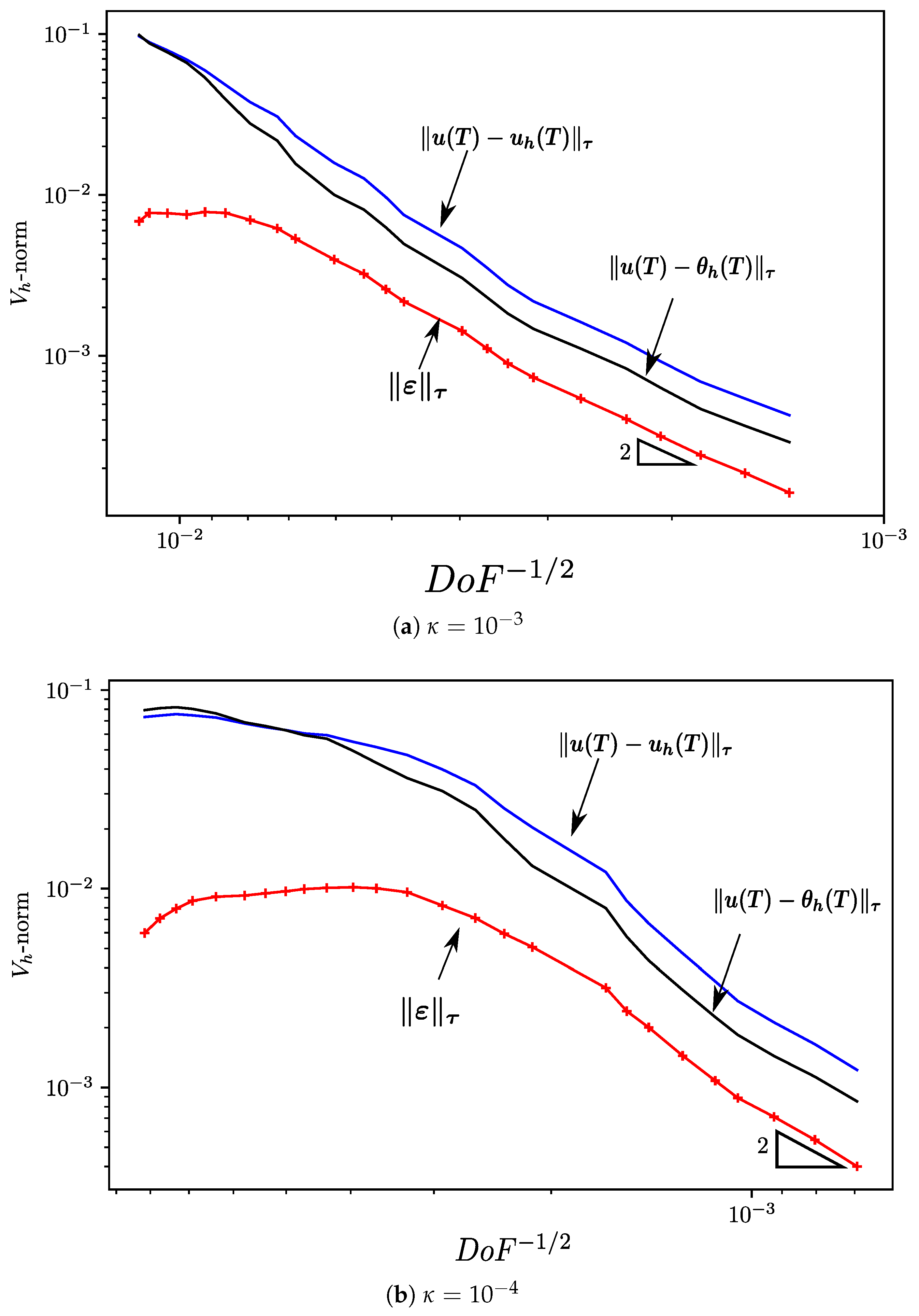
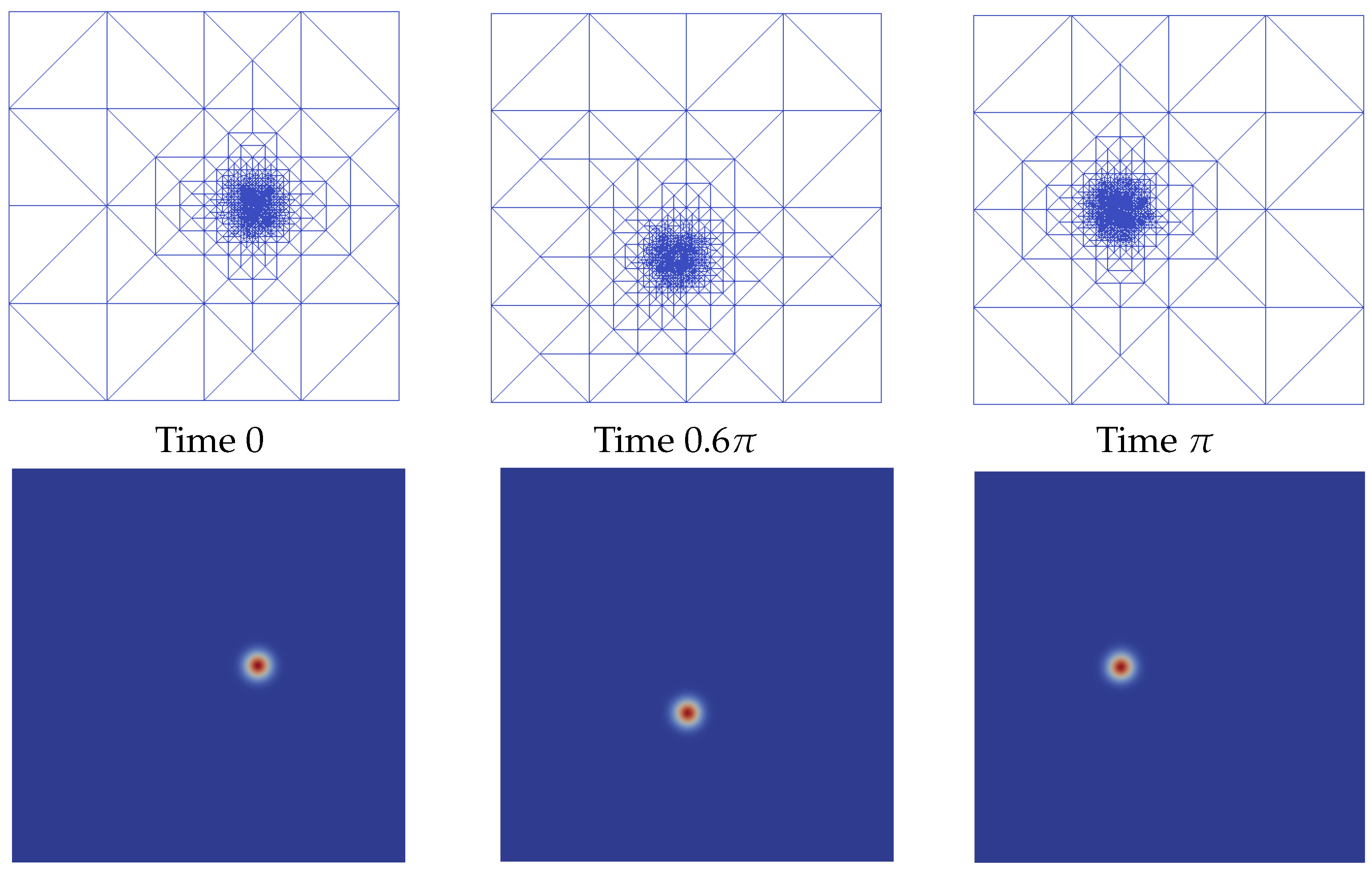
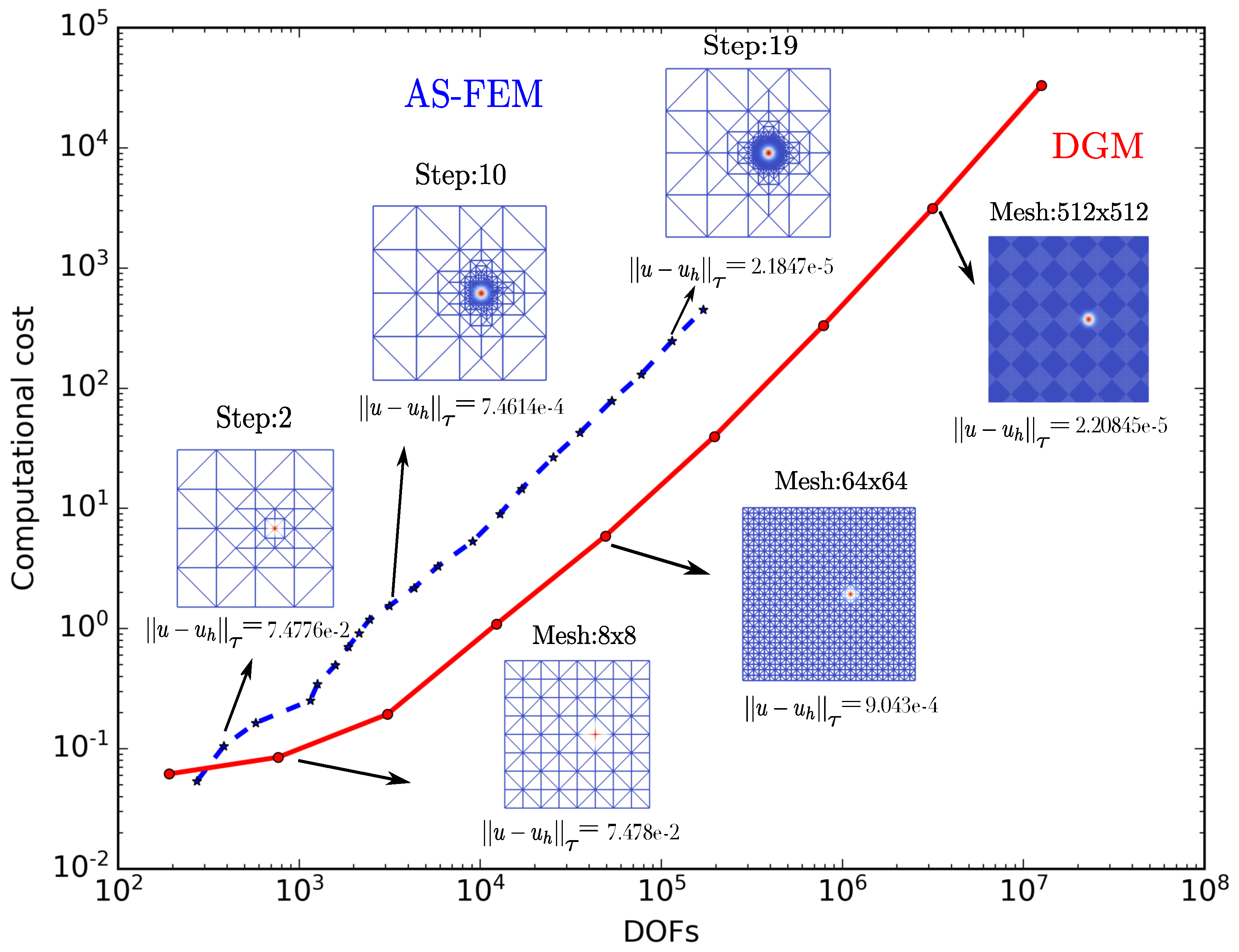
5.3. Rotating Flow Transporting a Gaussian Profile
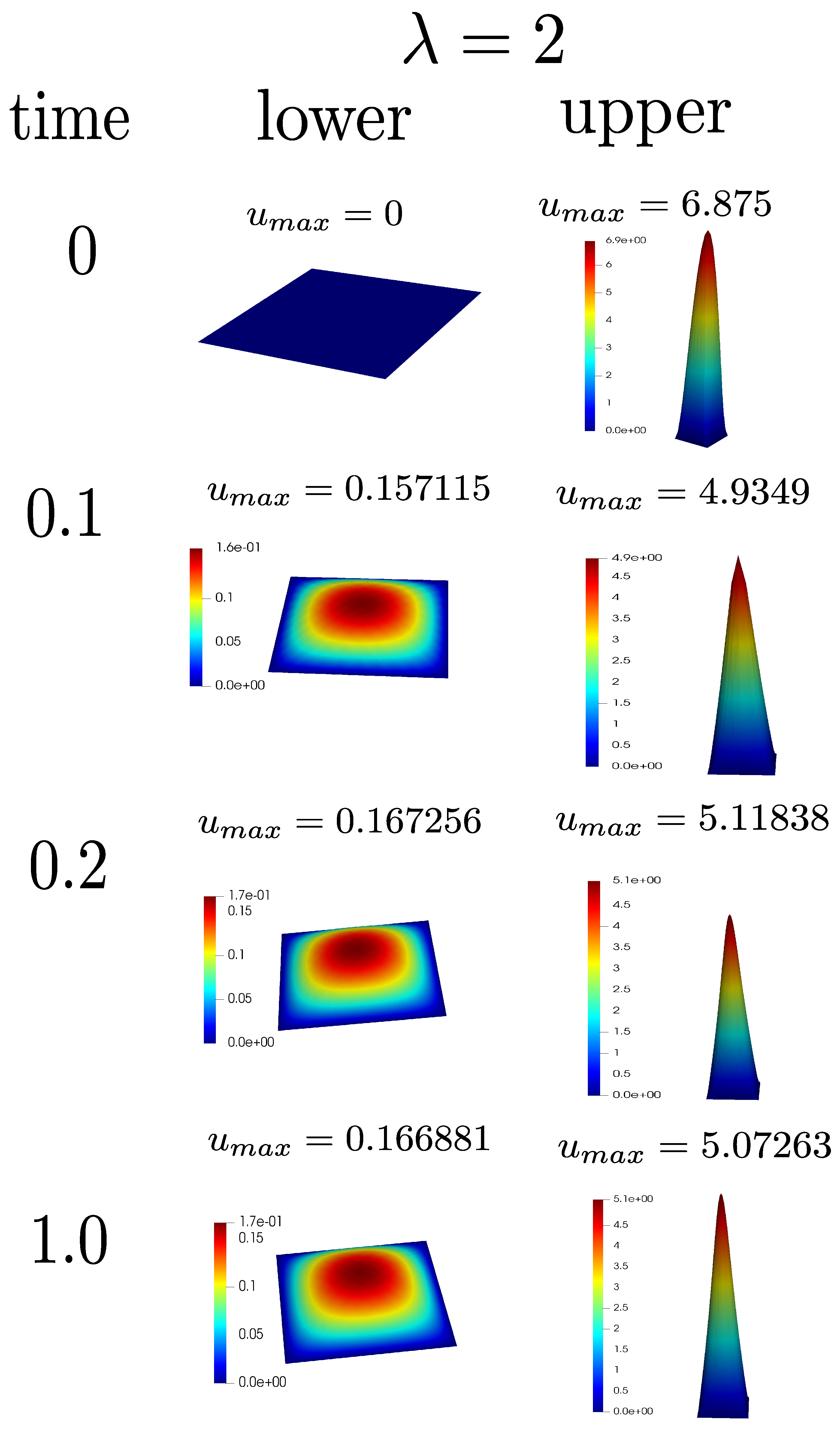
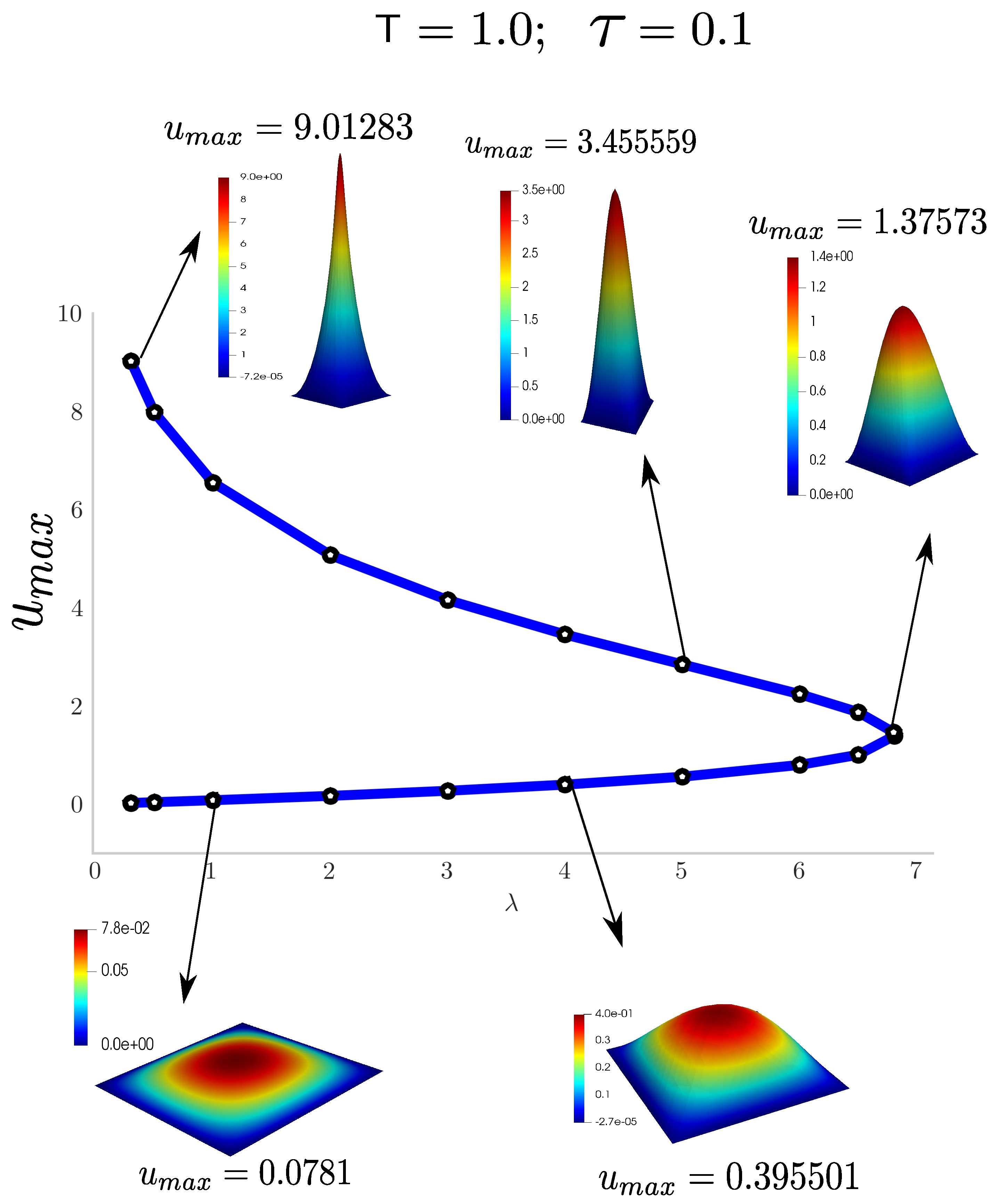
5.4. Unsteady Bratu Equation: Non-Linear Diffusion-Reaction Equation
6. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Brooks, A.N.; Hughes, T.J. Streamline upwind/Petrov–Galerkin formulations for convection dominated flows with particular emphasis on the incompressible Navier–Stokes equations. Comput. Methods Appl. Mech. Eng. 1982, 32, 199–259. [Google Scholar] [CrossRef]
- Hughes, T.J.R.; Franca, L.P.; Hulbert, G.M. A new finite element formulation for computational fluid dynamics: VIII. The Galerkin/Least-Squares method for advection–diffusive equations. Comput. Methods Appl. Mech. Eng. 1989, 73, 173–189. [Google Scholar] [CrossRef]
- Hughes, T.J.; Feijóo, G.R.; Mazzei, L.; Quincy, J.B. The variational multiscale method—A paradigm for computational mechanics. Comput. Methods Appl. Mech. Eng. 1998, 166, 3–24. [Google Scholar] [CrossRef]
- Hughes, T.J.R.; Scovazzi, G.; Franca, L.P. Multiscale and Stabilized Methods. In Encyclopedia of Computational Mechanics, 2nd ed.; American Cancer Society: Kennesaw, GA, USA, 2017; pp. 1–64. [Google Scholar]
- Bazilevs, Y.; Calo, V.; Cottrell, J.; Hughes, T.; Reali, A.; Scovazzi, G. Variational multiscale residual-based turbulence modeling for large eddy simulation of incompressible flows. Comput. Methods Appl. Mech. Eng. 2007, 197, 173–201. [Google Scholar] [CrossRef]
- Bazilevs, Y.; Michler, C.; Calo, V.; Hughes, T. Isogeometric variational multiscale modeling of wall-bounded turbulent flows with weakly enforced boundary conditions on unstretched meshes. Comput. Methods Appl. Mech. Eng. 2010, 199, 780–790. [Google Scholar] [CrossRef]
- Chang, K.; Hughes, T.; Calo, V. Isogeometric variational multiscale large-eddy simulation of fully-developed turbulent flow over a wavy wall. Comput. Fluids 2012, 68, 94–104. [Google Scholar] [CrossRef]
- Ghaffari Motlagh, Y.; Ahn, H.T.; Hughes, T.J.; Calo, V.M. Simulation of laminar and turbulent concentric pipe flows with the isogeometric variational multiscale method. Comput. Fluids 2013, 71, 146–155. [Google Scholar] [CrossRef]
- Arnold, D.N.; Brezzi, F.; Cockburn, B.; Donatella Marini, L. Unified analysis of discontinuous Galerkin methods for elliptic problems. SIAM J. Numer. Anal. 2001, 39, 1749–1779. [Google Scholar] [CrossRef]
- Burman, E.; Hansbo, P. Edge stabilization for Galerkin approximations of convection-diffusion-reaction problems. Comput. Methods Appl. Mech. Eng. 2004, 193, 1437–1453. [Google Scholar] [CrossRef] [Green Version]
- Brezzi, F.; Marini, L.D.; Süli, E. Discontinuous Galerkin methods for first-order hyperbolic problems. Math. Model. Methods Appl. Sci. 2004, 14, 1893–1903. [Google Scholar] [CrossRef]
- Ayuso, B.; Marini, L.D. Discontinuous Galerkin methods for advection–diffusion–reaction problems. SIAM J. Numer. Anal. 2009, 47, 1391–1420. [Google Scholar] [CrossRef]
- Cockburn, B.; Karniadakis, G.E.; Shu, C.W. Discontinuous Galerkin Methods: Theory, Computation and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 11. [Google Scholar]
- Demwkowicz, L.; Gopalakrishnan, J. Analysis of the DPG Method for the Poisson Equation. SIAM J. Numer. Anal. 2011, 49, 1788–1809. [Google Scholar] [CrossRef] [Green Version]
- Zitelli, J.; Muga, I.; Demkowicz, L.; Gopalakrishnan, J.; Pardo, D.; Calo, V. A class of discontinuous Petrov–Galerkin methods. Part IV: The optimal test norm and time-harmonic wave propagation in 1D. J. Comput. Phys. 2011, 230, 2406–2432. [Google Scholar] [CrossRef] [Green Version]
- Niemi, A.H.; Collier, N.O.; Calo, V.M. Automatically stable discontinuous Petrov–Galerkin methods for stationary transport problems: Quasi-optimal test space norm. Comput. Math. Appl. 2013, 66, 2096–2113. [Google Scholar] [CrossRef]
- Cockburn, B.; Shu, C.W. The local discontinuous Galerkin method for time-dependent convection–diffusion systems. SIAM J. Numer. Anal. 1998, 35, 2440–2463. [Google Scholar] [CrossRef]
- Borker, R.; Farhat, C.; Tezaur, R. A high-order discontinuous Galerkin method for unsteady advection–diffusion problems. J. Comput. Phys. 2017, 332, 520–537. [Google Scholar] [CrossRef]
- Rivière, B. Discontinuous Galerkin Methods for Solving Elliptic and Parabolic Equations: Theory and Implementation; SIAM: Philadelphia, PA, USA, 2008. [Google Scholar]
- Di Pietro, D.A.; Ern, A. Mathematical Aspects of Discontinuous Galerkin Methods; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011; Volume 69. [Google Scholar]
- Demkowicz, L.; Gopalakrishnan, J. A class of discontinuous Petrov–Galerkin methods. Part I: The transport equation. Comput. Methods Appl. Mech. Eng. 2010, 199, 1558–1572. [Google Scholar] [CrossRef] [Green Version]
- Führer, T.; Heuer, N.; Karkulik, M. Analysis of backward Euler primal DPG methods. Comput. Methods Appl. Math. 2021, 21, 811–826. [Google Scholar] [CrossRef]
- Barrenechea, G.R.; Brezzi, F.; Cangiani, A.; Georgoulis, E.H. Building Bridges: Connections and Challenges in Modern Approaches to Numerical Partial Differential Equations; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Roberts, N.V.; Henneking, S. Time-stepping DPG formulations for the heat equation. Comput. Math. Appl. 2020, 95, 242–255. [Google Scholar] [CrossRef]
- Ern, A.; Vohralík, M. A posteriori error estimation based on potential and flux reconstruction for the heat equation. SIAM J. Numer. Anal. 2010, 48, 198–223. [Google Scholar] [CrossRef]
- Zhu, L.; Schötzau, D. A robust a posteriori error estimate for hp-adaptive DG methods for convection–diffusion equations. IMA J. Numer. Anal. 2010, 31, 971–1005. [Google Scholar] [CrossRef] [Green Version]
- Ern, A.; Proft, J. A posteriori discontinuous Galerkin error estimates for transient convection-diffusion equations. Appl. Math. Lett. 2005, 18, 833–841. [Google Scholar] [CrossRef] [Green Version]
- Araya, R.; Venegas, P. An a posteriori error estimator for an unsteady advection-diffusion- reaction problem. Comput. Math. Appl. 2014, 66, 2456–2476. [Google Scholar] [CrossRef]
- Cangiani, A.; Georgoulis, E.H.; Metcalfe, S. Adaptive discontinuous Galerkin methods for nonstationary convection-diffusion problems. IMA J. Numer. Anal. 2014, 34, 1578–1597. [Google Scholar] [CrossRef] [Green Version]
- Calo, V.M.; Ern, A.; Muga, I.; Rojas, S. An adaptive stabilized conforming finite element method via residual minimization on dual discontinuous Galerkin norms. Comput. Methods Appl. Mech. Eng. 2020, 363, 112891. [Google Scholar] [CrossRef] [Green Version]
- Cier, R.J.; Rojas, S.; Calo, V.M. Automatically adaptive, stabilized finite element method via residual minimization for heterogeneous, anisotropic advection–diffusion–reaction problems. Comput. Methods Appl. Mech. Eng. 2021, 385, 114027. [Google Scholar] [CrossRef]
- Calo, V.; Łoś, M.; Deng, Q.; Muga, I.; Paszyński, M. Isogeometric Residual Minimization Method (iGRM) with direction splitting preconditioner for stationary advection-dominated diffusion problems. Comput. Methods Appl. Mech. Eng. 2021, 373, 113214. [Google Scholar] [CrossRef]
- Cier, R.J.; Rojas, S.; Calo, V.M. A nonlinear weak constraint enforcement method for advection-dominated diffusion problems. Mech. Res. Commun. 2021, 112, 103602. [Google Scholar] [CrossRef]
- Rojas, S.; Pardo, D.; Behnoudfar, P.; Calo, V.M. Goal-oriented adaptivity for a conforming residual minimization method in a dual discontinuous Galerkin norm. Comput. Methods Appl. Mech. Eng. 2021, 377, 113686. [Google Scholar] [CrossRef]
- Kyburg, F.E.; Rojas, S.; Calo, V.M. Incompressible flow modeling using an adaptive stabilized finite element method based on residual minimization. Int. J. Numer. Methods Eng. 2022, 123, 1717–1735. [Google Scholar] [CrossRef]
- Łoś, M.; Rojas, S.; Paszyński, M.; Muga, I.; Calo, V.M. DGIRM: Discontinuous Galerkin based isogeometric residual minimization for the Stokes problem. J. Comput. Sci. 2021, 50, 101306. [Google Scholar] [CrossRef]
- Poulet, T.; Giraldo, J.F.; Ramanaidou, E.; Piechocka, A.; Calo, V.M. Paleo-stratigraphic permeability anisotropy controls supergene mimetic martite goethite deposits. Basin Res. 2022. [Google Scholar] [CrossRef]
- Labanda, N.A.; Espath, L.; Calo, V.M. A spatio-temporal adaptive phase-field fracture method. Comput. Methods Appl. Mech. Eng. 2022, 392, 114675. [Google Scholar] [CrossRef]
- Bramble, J.H.; Thomée, V. Semidiscrete least-squares methods for a parabolic boundary value problem. Math. Comput. 1972, 26, 633–648. [Google Scholar]
- Becker, J. A second order backward difference method with variable steps for a parabolic problem. BIT Numer. Math. 1998, 38, 644–662. [Google Scholar] [CrossRef]
- Crouzeix, M.; Lisbona, F. The convergence of variable-stepsize, variable-formula, multistep methods. SIAM J. Numer. Anal. 1984, 21, 512–534. [Google Scholar] [CrossRef]
- Ern, A.; Stephansen, A.F.; Zunino, P. A discontinuous Galerkin method with weighted averages for advection–diffusion equations with locally small and anisotropic diffusivity. IMA J. Numer. Anal. 2009, 29, 235–256. [Google Scholar] [CrossRef]
- Dörfler, W. A convergent adaptive algorithm for Poisson’s equation. SIAM J. Numer. Anal. 1996, 33, 1106–1124. [Google Scholar] [CrossRef]
- Bank, R.E.; Welfert, B.D.; Yserentant, H. A class of iterative methods for solving saddle point problems. Numer. Math. 1989, 56, 645–666. [Google Scholar] [CrossRef]
- Alnæs, M.; Blechta, J.; Hake, J.; Johansson, A.; Kehlet, B.; Logg, A.; Richardson, C.; Ring, J.; Rognes, M.E.; Wells, G.N. The FEniCS project version 1.5. Arch. Numer. Softw. 2015, 3. [Google Scholar] [CrossRef]
- Bank, R.E.; Rose, D.J. Global approximate Newton methods. Numer. Math. 1981, 37, 279–295. [Google Scholar] [CrossRef]
- Hajipour, M.; Jajarmi, A.; Baleanu, D. On the accurate discretization of a highly nonlinear boundary value problem. Numer. Algorithms 2018, 79, 679–695. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giraldo, J.F.; Calo, V.M. An Adaptive in Space, Stabilized Finite Element Method via Residual Minimization for Linear and Nonlinear Unsteady Advection–Diffusion–Reaction Equations. Math. Comput. Appl. 2023, 28, 7. https://doi.org/10.3390/mca28010007
Giraldo JF, Calo VM. An Adaptive in Space, Stabilized Finite Element Method via Residual Minimization for Linear and Nonlinear Unsteady Advection–Diffusion–Reaction Equations. Mathematical and Computational Applications. 2023; 28(1):7. https://doi.org/10.3390/mca28010007
Chicago/Turabian StyleGiraldo, Juan F., and Victor M. Calo. 2023. "An Adaptive in Space, Stabilized Finite Element Method via Residual Minimization for Linear and Nonlinear Unsteady Advection–Diffusion–Reaction Equations" Mathematical and Computational Applications 28, no. 1: 7. https://doi.org/10.3390/mca28010007
APA StyleGiraldo, J. F., & Calo, V. M. (2023). An Adaptive in Space, Stabilized Finite Element Method via Residual Minimization for Linear and Nonlinear Unsteady Advection–Diffusion–Reaction Equations. Mathematical and Computational Applications, 28(1), 7. https://doi.org/10.3390/mca28010007