
Modelization of Low-Cost Maneuvers for an Areostationary Preliminary Mission Design


Abstract
:1. Introduction
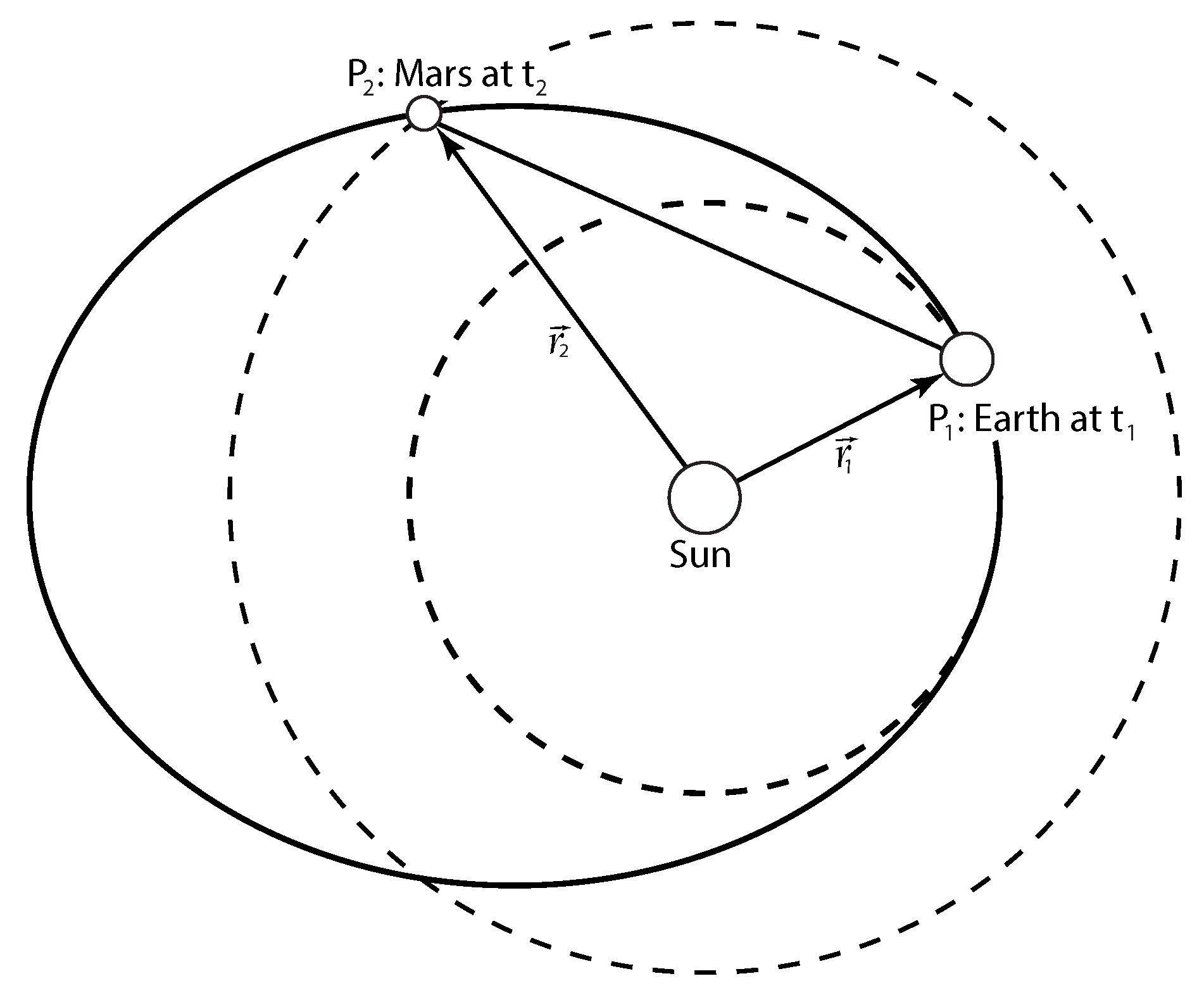
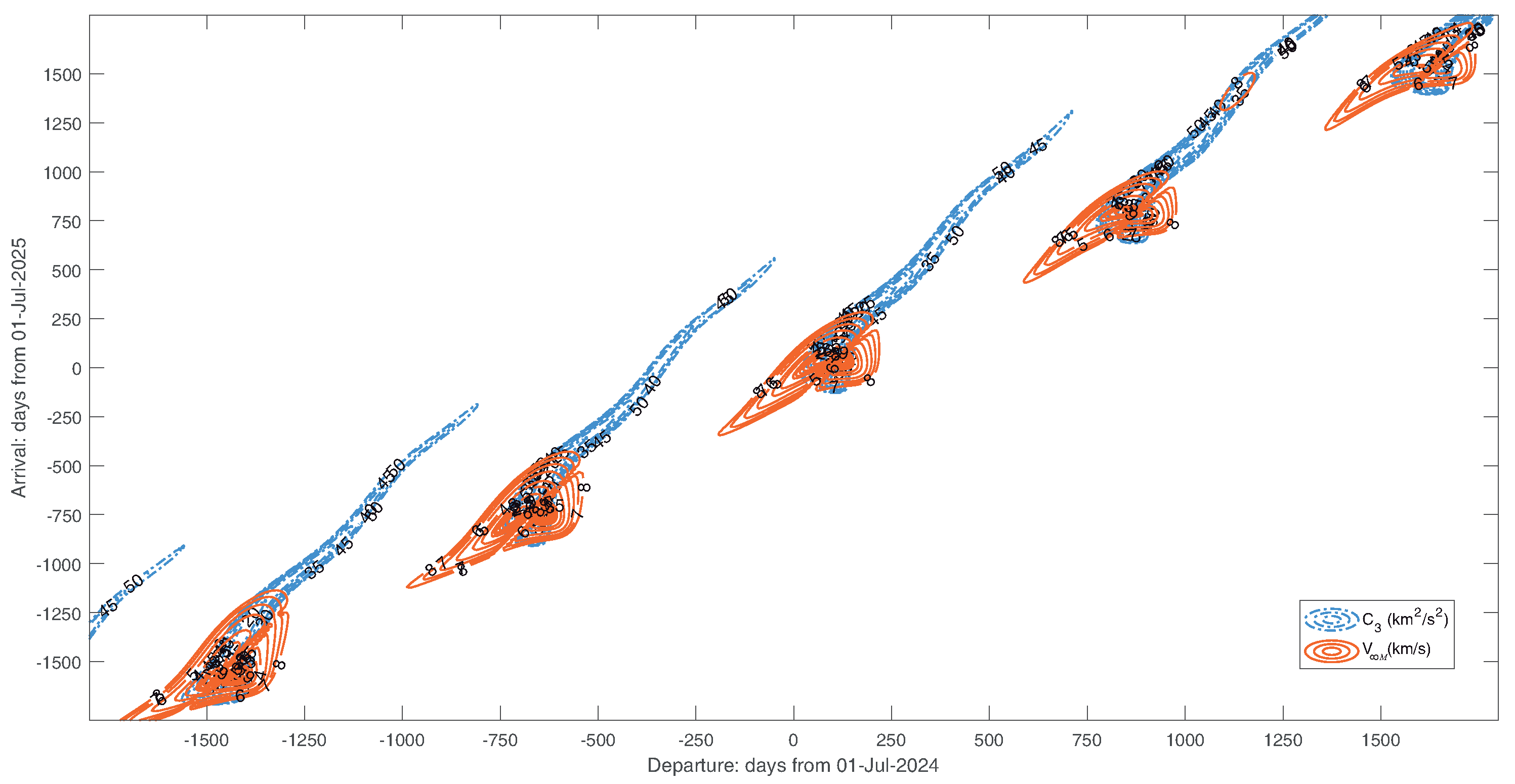
2. Minimum-Energy Launch Window for Earth–Mars Transfer Trajectories
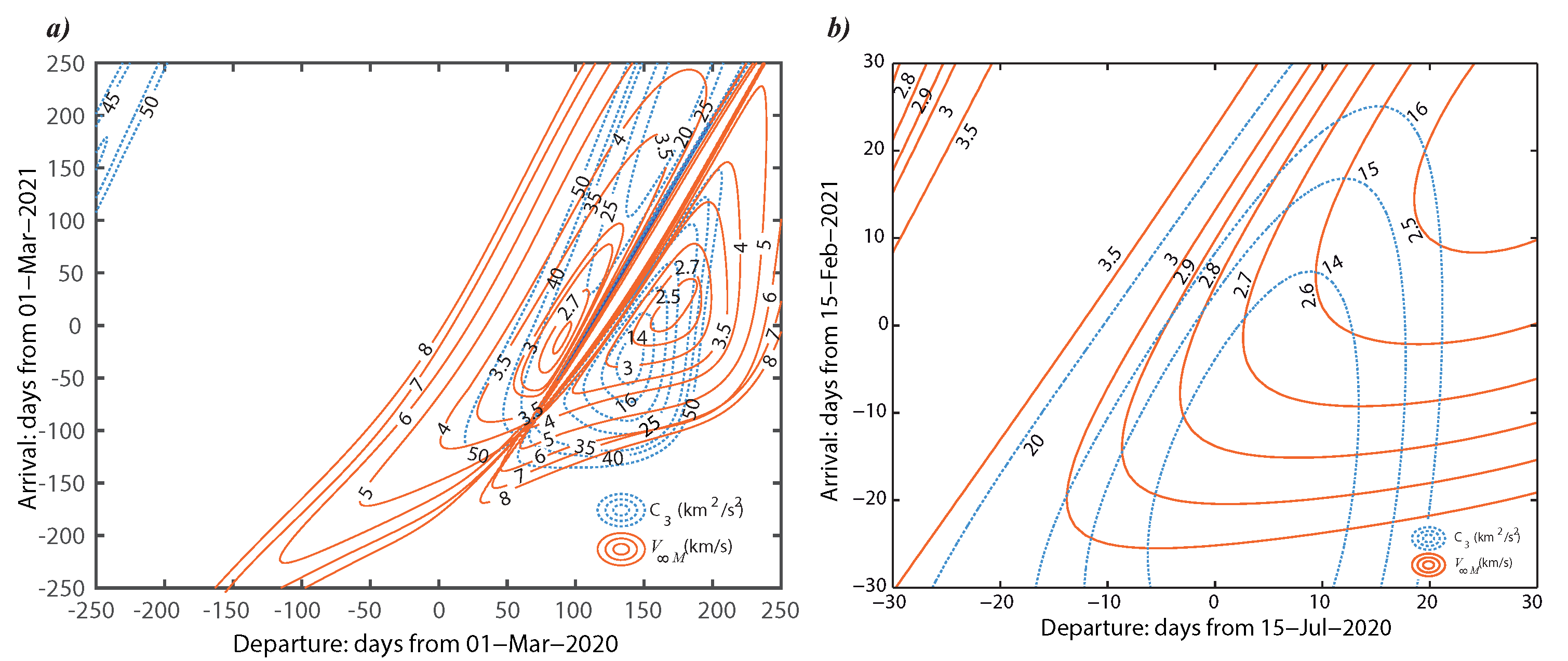
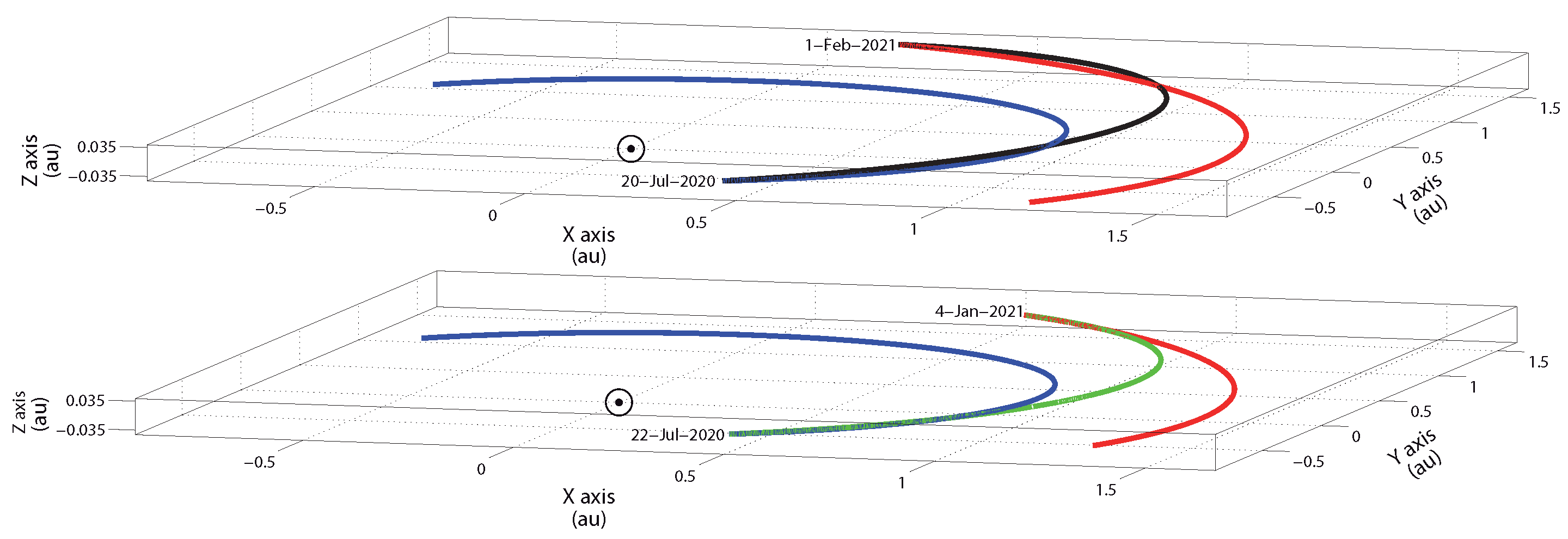
3. Determination of Earth–Mars Trajectories with Hyperbolic Orbital Objective Values
4. Mars Arrival Maneuvers Evaluation for an Areostationary Mission
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CPU | Central Processing Unit |
| SOI | Sphere Of Influence |
| TOF | Time Of Flight |
References
- Edwards, C.; Arnold, B.; DePaula, R.; Kazz, G.; Lee, C.; Noreen, G. Relay communications strategies for Mars exploration through 2020. Acta Astronaut. 2006, 59, 310–318. [Google Scholar] [CrossRef]
- Edwards, C.; DePaula, R. Key telecommunications technologies for increasing data return for future Mars exploration. Acta Astronaut. 2007, 61, 131–138. [Google Scholar] [CrossRef]
- Jentsch, C.; Rathke, A.; Wallner, O. Interplanetary communication: A review of future missions. In Proceedings of the 2009 International Workshop on Satellite and Space Communications, Siena, Italy, 9–11 September 2009; pp. 291–294. [Google Scholar] [CrossRef]
- Podnar, G.; Dolan, J.; Elfes, A. Telesupervised robotic systems and the human exploration of Mars. J. Cosmol. 2010, 12, 4058–4067. [Google Scholar]
- Romero, P.; Pablos, B.; Barderas, G. Analysis of orbit determination from Earth-based tracking for relay satellites in a perturbed areostationary orbit. Acta Astronaut. 2017, 136, 434–442. [Google Scholar] [CrossRef]
- Montabone, L.; Heavens, N.; Babuscia, A.; Barba, N.; Battalio, J.; Bertrand, T.; Edwards, C.; Guzewich, S.; Kahre, M.; Kass, D.; et al. Observing Mars from Areostationary orbit: Benefits and applications. In Proceedings of the Mars Exploration Program Analysis Group (MEPAG) #38, Virtual, 15–17 April 2020. [Google Scholar]
- Montabone, L.; Heavens, N.; Alvarellos, J.L.; Lillis, R.; Aye, M.; Liuzzi, G.; Babuscia, A.; Mischna, M.A.; Barba, N.; Newman, C.E.; et al. Observing Mars from Areostationary Orbit: Benefits and Applications. Available online: https://doi.org/10.13140/RG.2.2.21498.72643 (accessed on 20 September 2023).
- Romero, P.; Gambi, J. Optimal control in the east/west station-keeping manoeuvres for geostationary satellites. Aerosp. Sci. Technol. 2004, 8, 729–734. [Google Scholar] [CrossRef]
- Romero, P.; Gambi, J.; Patiño, E. Stationkeeping manoeuvres for geostationary satellites using feedback control techniques. Aerosp. Sci. Technol. 2007, 11, 229–237. [Google Scholar] [CrossRef]
- Prado, A.; Broucke, R. Transfer orbits in the Earth-Moon system using a regularized model. J. Guid. Control. Dyn. 1996, 19, 929–933. [Google Scholar] [CrossRef]
- Broucke, R.; Prado, A. Jupiter swing-by trajectories passing near the Earth. Adv. Astronaut. Sci. 1993, 82, 1159–1176. [Google Scholar]
- Kluever, C. Efficient Computation of Optimal Interplanetary Trajectories Using Solar Electric Propulsion. J. Guid. Control. Dyn. 2014, 38, 5. [Google Scholar] [CrossRef]
- Li, X.; Qiao, D.; Chen, H. Interplanetary transfer optimization using cost function with variable coefficients. Astrodynamics 2019, 3, 173–188. [Google Scholar] [CrossRef]
- Chen, L.; Li, J. Optimization of Earth-Mars transfer trajectories with launch constraints. Astrophys. Space Sci. 2022, 367, 12. [Google Scholar] [CrossRef]
- Woolley, R.; Whetsel, C. On the nature of Earth-Mars Porkchop plots. Adv. Astronaut. Sci. 2013, 148, 413–426. [Google Scholar]
- Sanchez-Garcia, M.M.; Barderas, G.; Romero, P. Analysis of the optimization for an Earth to Mars areostationary mission. In Proceedings of the European Planetary Science Congress, Virtual, 21 September–9 October 2020; Volume 14, p. EPSC2020-134. [Google Scholar] [CrossRef]
- Gooding, R.H. A procedure for the solution of Lambert’s orbital boundary-value problem. Celest. Mech. Dyn. Astron. 1990, 48, 145–165. [Google Scholar] [CrossRef]
- Conte, D. Survey of Earth-Mars trajectories using Lambert’s Problem and Applications. Ph.D. Thesis, The Pennsylvania State University, State College, PA, USA, 2014. [Google Scholar]
- Matlab. Genetic Algorithms Options. 2022. Available online: https://es.mathworks.com/help/gads/genetic-algorithm-options.html (accessed on 20 September 2023).
- Clarke, V.C., Jr.; Bollman, W.E.; Feitis, P.H.; Roth, R.Y. Design Parameters for Ballistic Interplanetary Trajectories, Part II: One-Way Transfers to Mercury and Jupiter; Technical Report 32–77, JPL; US Gov.: Washington, DC, USA, 1966.
- Cornelisse, J.W. Trajectory analysis for interplanetary missions. ESA J. 1978, 2, 131–144. [Google Scholar]
- Parvathi, S.P.; Ramanan, R.V. Direct Transfer Trajectory Design Options for Interplanetary Orbiter Missions using an Iterative Patched Conic Method. Adv. Space Res. 2016, 59, 1763–1774. [Google Scholar] [CrossRef]
- Parvathi, S.P.; Ramanan, R.V. Direct interplanetary trajectory design with a precise V-infinity targeting technique. In Proceedings of the 2017 First International Conference on Recent Advances in Aerospace Engineering (ICRAAE), Coimbatore, India, 3–4 March 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Iwabuchi, M.; Satoh, S.; Yamada, K. Smooth and continuous interplanetary trajectory design of spacecraft using iterative patched-conic method. Acta Astronaut. 2021, 185, 58–69. [Google Scholar] [CrossRef]
- Bond, V.R. Matched-Conic Solutions to Round-Trip Interplanetary Trajectory Problems That Insure State-Vector Continuity at All Boundaries; Technical Note D-4942; NASA: Washington, DC, USA, 1969. [Google Scholar]
- Farnocchia, D.; Eggl, S.; Chodas, P.; Giorgini, J.; Chesley, S. Planetary encounter analysis on the B-plane: A comprehensive formulation. Celest. Mech. Dyn. Astron. 2019, 131, 36. [Google Scholar] [CrossRef]
- George, L.E.; Kos, L.D. Interplanetary Mission Design Handbook: Earth-to-Mars Mission Opportunities and Mars-to-Earth Return Opportunities, 2009–2024; Technical Report TM-1998-208533; NASA: Washington, DC, USA, 1998. [Google Scholar]
- Burke, L.M.; Falck, R.D.; McGuire, M.L. Interplanetary Mission Design Handbook: Earth-to-Mars Mission Opportunities 2026 to 2045; Technical Report TM-2010-216764; NASA: Washington, DC, USA, 2010. [Google Scholar]
- Lancaster, E.R.; Blanchard, R.C. A Unified Form of Lambert’s Theorem; Technical Note D-5368; NASA: Washington, DC, USA, 1969. [Google Scholar]
- Oldenhuis, R. Robust Solver for Lambert’s Orbital-Boundary Value Problem. 2017. Available online: http://es.mathworks.com/matlabcentral/fileexchange/26348-robust-solver-for-lambert-s-orbital-boundary-value-problem?? (accessed on 20 September 2023).
- Conte, D.; Di Carlo, M.; Ho, K.; Spencer, D.; Vasile, M. Earth-Mars transfers through Moon Distant Retrograde Orbits. Acta Astronaut. 2017, 143, 372–379. [Google Scholar] [CrossRef]
- Conte, D.; Spencer, D. Mission Analysis for Earth to Mars-Phobos Distant Retrograde Orbits. Acta Astronaut. 2018, 151, 761–771. [Google Scholar] [CrossRef]
- Trajectory Optimization Tool, v2.1.1. 2011. Available online: http://www.orbithangar.com/searchid.php?ID=5418 (accessed on 20 September 2023).
- Farley, K.A.; Williford, K.H.; Stack, K.M.; Bhartia, R.; Chen, A.; de la Torre, M.; Hand, K.P.; Goreva, Y.; Herd, C.D.K.; Hueso, R.; et al. Mars 2020 Mission Overview. Space Sci. Rev. 2020, 216, 142. [Google Scholar] [CrossRef]
- Jiang, X.; Yang, B.; Li, S. Overview of China’s 2020 Mars mission design and navigation. Astrodynamics 2018, 2, 1–11. [Google Scholar] [CrossRef]
- Sharaf, O.; Amiri, S.; AlDhafri, S.; Withnell, P.; Brain, D. Sending Hope to Mars. Nat. Astron. 2020, 4, 722. [Google Scholar] [CrossRef]
- Capderou, M. Satellites. Orbits and Missions; Springer: Paris, France, 2005. [Google Scholar]
- Montenbruck, O.; Gill, E. Satellite Orbits: Models, Methods, and Applications; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pop. | Crossover | Selection | CPU | Departure | TOF | C | ||
|---|---|---|---|---|---|---|---|---|
| Time (s) | Time | (Days) | ||||||
| Departure Date 20 July 2020 | ||||||||
| 100 | Heuristic | remainder | 10.86 | 01:19:08 | 196.9397 | 13.2216 | 2.7681 | 15.9897 |
| stoch. unif. | 10.36 | 01:05:27 | 196.9253 | 13.2212 | 2.7685 | 15.9897 | ||
| Scattered | remainder | 10.30 | 01:04:01 | 196.9501 | 13.2213 | 2.7684 | 15.9897 | |
| stoch. unif. | 10.49 | 01:01:17 | 196.9281 | 13.2212 | 2.7685 | 15.9897 | ||
| Single pt | remainder | 10.14 | 01:06:02 | 196.9657 | 13.2218 | 2.7679 | 15.9897 | |
| stoch. unif. | 10.35 | 01:14:40 | 196.9566 | 13.2217 | 2.7680 | 15.9897 | ||
| 500 | Heuristic | remainder | 48.30 | 01:06:27 | 196.9288 | 13.2212 | 2.7685 | 15.9897 |
| stoch. unif. | 47.86 | 01:13:05 | 196.9420 | 13.2215 | 2.7682 | 15.9897 | ||
| Scattered | remainder | 48.31 | 01:12:22 | 196.9420 | 13.2215 | 2.7682 | 15.9897 | |
| stoch. unif. | 47.60 | 01:21:17 | 196.9537 | 13.2218 | 2.7679 | 15.9897 | ||
| Single pt | remainder | 47.32 | 01:24:10 | 196.9407 | 13.2217 | 2.7681 | 15.9898 | |
| stoch. unif. | 47.19 | 01:16:41 | 196.9450 | 13.2216 | 2.7681 | 15.9897 | ||
| 2000 | Heuristic | remainder | 188.06 | 01:04:09 | 196.9393 | 13.2214 | 2.7683 | 15.9897 |
| stoch. unif. | 186.57 | 01:07:45 | 196.9332 | 13.2213 | 2.7684 | 15.9897 | ||
| Scattered | remainder | 222.98 | 01:16:41 | 196.9450 | 13.2216 | 2.7681 | 15.9897 | |
| stoch. unif. | 229.03 | 01:10:38 | 196.9361 | 13.2214 | 2.7683 | 15.9897 | ||
| Single pt | remainder | 238.38 | 01:08:54 | 196.9343 | 13.2214 | 2.7683 | 15.9897 | |
| stoch. unif. | 237.49 | 01:26:54 | 196.9480 | 13.2218 | 2.7679 | 15.9897 | ||
| Parameter | (a) | (b) |
|---|---|---|
| Departure Date, | 20 July 2020 01:13:05 | 22 July 2020 15:20:14 |
| Arrival Date, | 1 February 2021 | 4 January 2021 |
| Arrival time | 23:49:34 h | 15:21:40 h |
| Semimajor axis, (km) | 198,312,598.97 | 202,972,264.04 |
| Eccentricity, (unitless) | 0.23346 | 0.25130 |
| Inclination, (deg) | 1.73626 | 0.72898 |
| Ascending node long., (deg) | 297.4399 | 299.8067 |
| Arg. of the perihelium, (deg) | 359.6131 | 358.1402 |
| True anomaly, (deg) | 0.4652 | 2.0420 |
| (km/s) | 3.6361 | 3.7803 |
| (km/s) | 2.7682 | 3.5888 |
| Time of flight, TOF (days) | 196.9420 | 166.0010 |
| Total cost, C | 15.9897 | 17.8795 |
| Parameter | Value |
|---|---|
| Departure Date, | 31 October 2026 05:42:13 h |
| Arrival Date, | 31 August 2027 16:47:12 h |
| Semimajor axis, (km) | 189,961,652.992134 |
| Eccentricity, (unitless) | 0.218496 |
| Inclination, (deg) | 0.8695 |
| Periapsis argument, (deg) | 4.1768 |
| Right ascension node longitude, (deg) | 37.5815 |
| True anomaly, (deg) | 197.9132 |
| (km/s) | 3.0311 |
| (km/s) | 2.5913 |
| Time of flight, TOF (days) | 304.4618 |
| Orbit | Parameter | Units | Value |
|---|---|---|---|
| (a) | Departure date, | (UT) | 31 October 2026 05:42:13 h |
| Arrival date, | (UT) | 31 August 2027 16:47:12 h | |
| Semimajor axis, | (km) | 189,905,238.422086 | |
| Eccentricity, | (unitless) | 0.218286 | |
| Inclination, | (deg) | 0.9311 | |
| Periapsis argument, | (deg) | 4.3094 | |
| Right ascension node longitude, | (deg) | 37.5723 | |
| True anomaly, | (deg) | 197.9302 | |
| (km/s) | 3.0333 | ||
| (km/s) | 2.5763 | ||
| Time of flight, TOF | (days) | 304.4618 | |
| (b) | Semimajor axis, | (km) | 6600.229103 |
| Eccentricity, | (unitless) | 4.0950441 | |
| Inclination, | (deg) | 16.1167 | |
| Periapsis argument, | (deg) | 194.1344 | |
| Right ascension node longitude, | (deg) | 162.7116 | |
| True anomaly at , | (deg) | 258.4533 | |
| Periapsis radius, | (km) | 20,467.9232 | |
| Arrival at periapsis date, | (UT) | 31 August 2027 20:03:55 |
| (deg) | (km) | () | (km/s) | C |
|---|---|---|---|---|
| 15,000 | 9.2014 | 2.5768 | 11.7782 | |
| 25,000 | 9.2008 | 2.5759 | 11.7767 | |
| 9.2011 | 2.5763 | 11.7774 | ||
| 90 | 9.2123 | 2.5781 | 11.7904 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sánchez-García, M.M.; Barderas, G.; Romero, P. Modelization of Low-Cost Maneuvers for an Areostationary Preliminary Mission Design. Math. Comput. Appl. 2023, 28, 105. https://doi.org/10.3390/mca28060105
Sánchez-García MM, Barderas G, Romero P. Modelization of Low-Cost Maneuvers for an Areostationary Preliminary Mission Design. Mathematical and Computational Applications. 2023; 28(6):105. https://doi.org/10.3390/mca28060105
Chicago/Turabian StyleSánchez-García, Marta M., Gonzalo Barderas, and Pilar Romero. 2023. "Modelization of Low-Cost Maneuvers for an Areostationary Preliminary Mission Design" Mathematical and Computational Applications 28, no. 6: 105. https://doi.org/10.3390/mca28060105
APA StyleSánchez-García, M. M., Barderas, G., & Romero, P. (2023). Modelization of Low-Cost Maneuvers for an Areostationary Preliminary Mission Design. Mathematical and Computational Applications, 28(6), 105. https://doi.org/10.3390/mca28060105