Phase Error Evaluation via Differentiation and Cross-Multiplication Demodulation in Phase-Sensitive Optical Time-Domain Reflectometry


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Working Principle
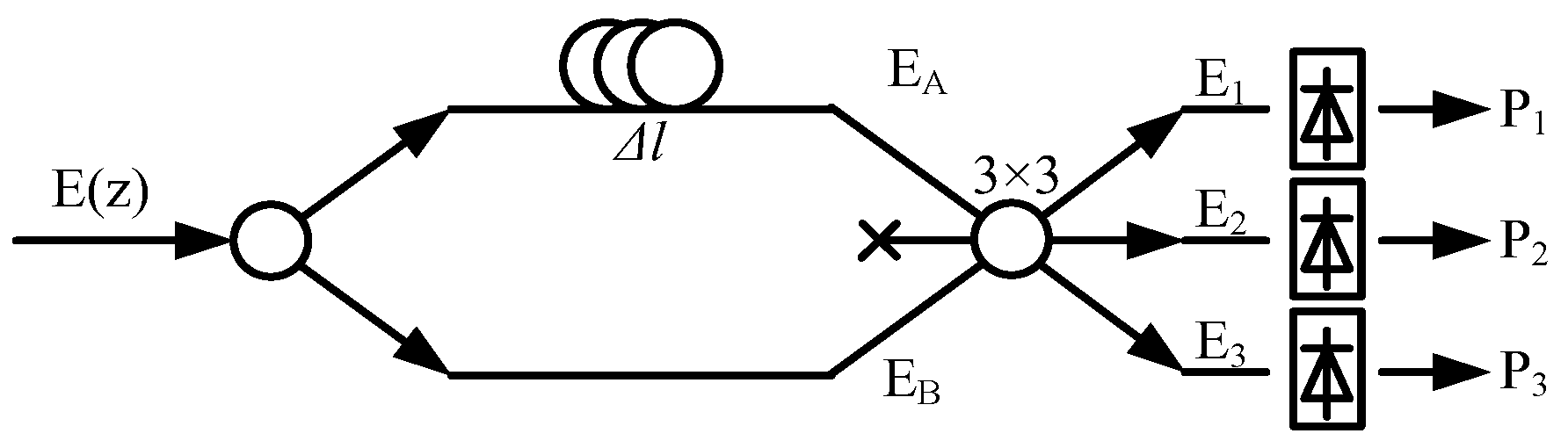
2.1. Phase Retrieval Based on IMZI Scheme
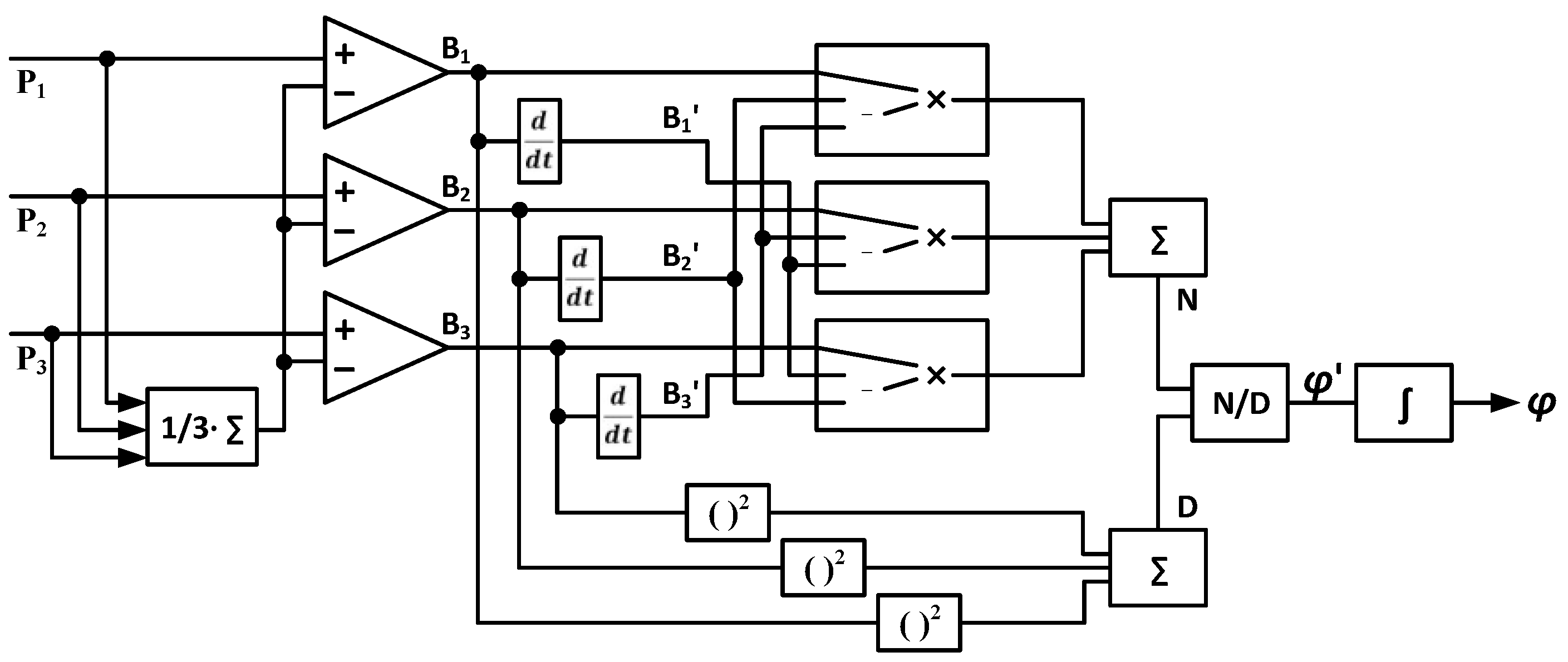
2.2. DCM Algorithm
2.3. I/Q Demodulation
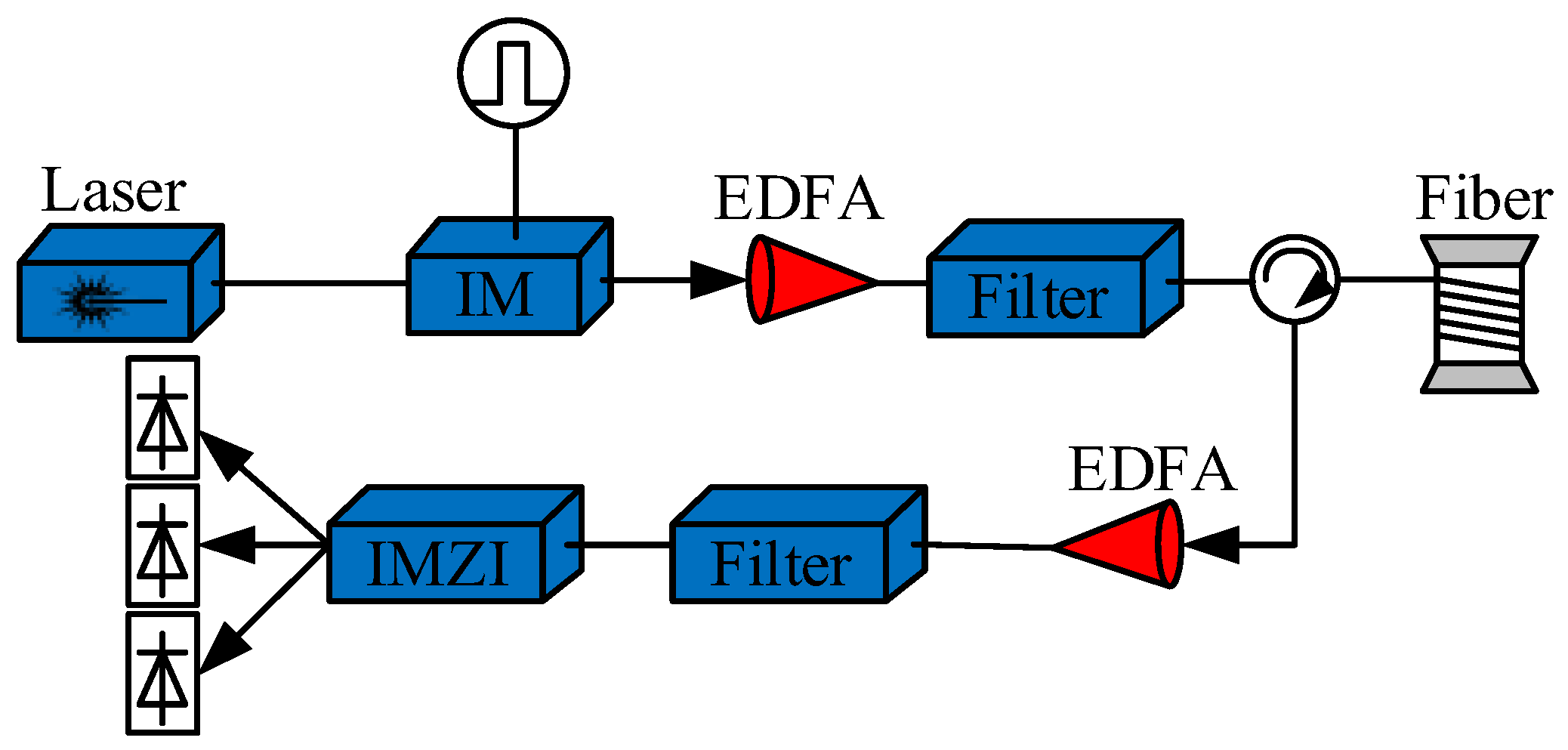
3. Experimental Setup
4. Results and Discussion
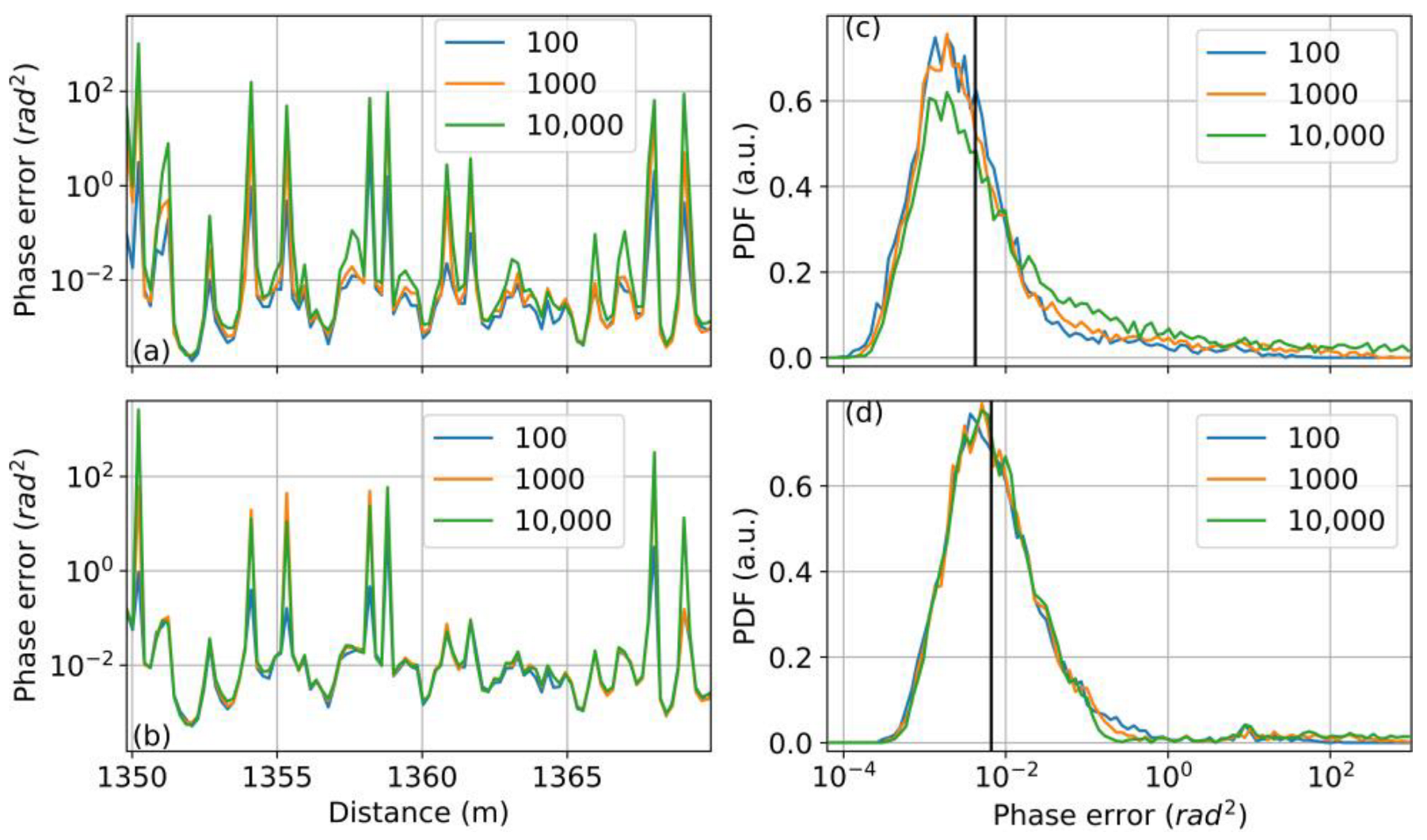
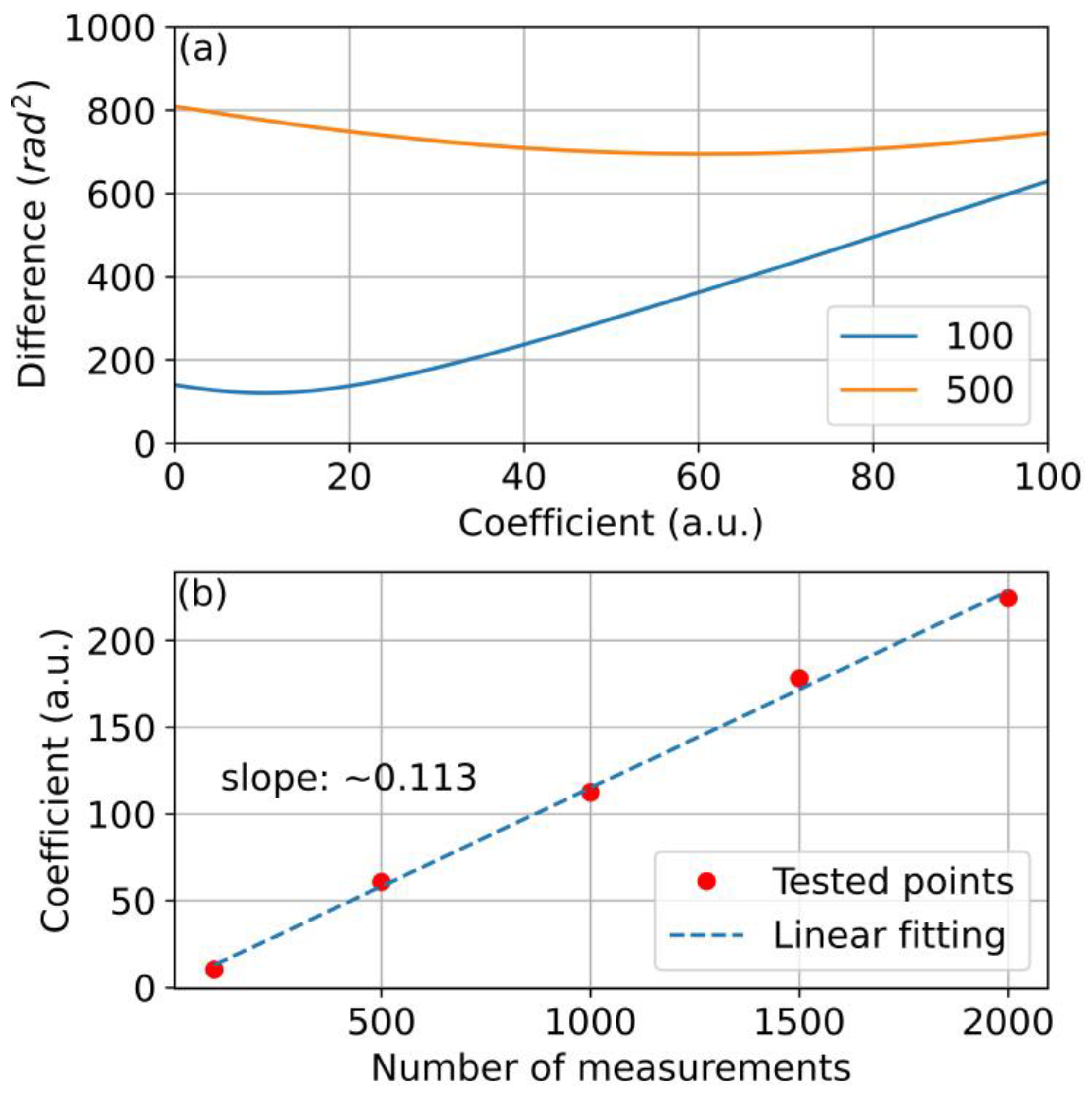
4.1. Influence of the Number of Measurements on the Phase Error
4.2. Determination of the Coefficient C
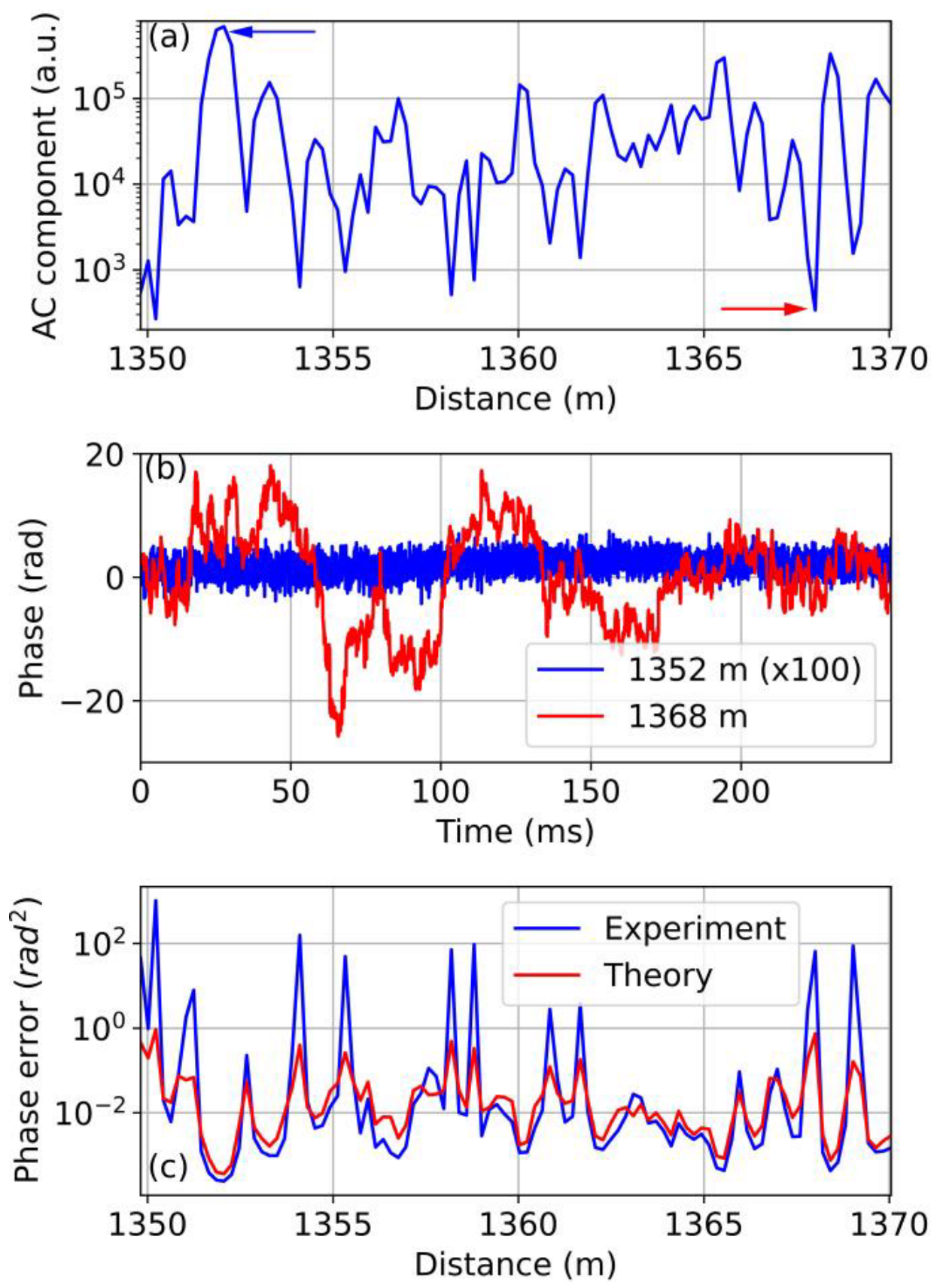
4.3. Spatial Phase Variation Characteristics under Static Conditions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Hartog, H.A. An Introduction to Distributed Optical Fibre Sensors; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Filograno, L.M.; Riziotis, C.; Kandyla, M. A low-cost phase-OTDR system for structural health monitoring: Design and instrumentation. Instruments 2019, 3, 46. [Google Scholar] [CrossRef]
- JLindsey, J.; Martin, R.E.; Dreger, S.D.; Freifeld, B.; Cole, S.; James, R.S.; Biondi, L.B.; Ajo-Franklin, B.J. Fiber-optic network observations of earthquake wavefields. Geophys. Res. Lett. 2017, 44, 11792–11799. [Google Scholar]
- Fernandez-Ruiz, R.M.; Soto, A.M.; Williams, F.E.; Martin-Lopez, S.; Zhan, Z.; Gonzalez-Herraez, M.; Martins, F.H. Distributed acoustic sensing for seismic activity monitoring. APL Photonics 2020, 5, 030901. [Google Scholar] [CrossRef]
- Owen, A.; Duckworth, F.; Worsley, J. OptaSense: Fibre optic distributed acoustic sensing for border monitoring. In Proceedings of the 2012 European Intelligence and Security Informatics Conference IEEE, Odense, Denmark, 22–24 August 2012. [Google Scholar]
- Wang, Z.; Zhang, L.; Wang, S.; Xue, N.; Peng, F.; Fan, M.; Sun, W.; Qian, X.; Rao, J.; Rao, Y. Coherent Φ-OTDR based on I/Q demodulation and homodyne detection. Opt. Express 2016, 24, 853–858. [Google Scholar] [CrossRef]
- Posey, R.; Johnson, A.G.; Vohra, T.S. Strain sensing based on coherent Rayleigh scattering in an optical fibre. Electron. Lett. 2000, 36, 1688–1689. [Google Scholar] [CrossRef]
- Feng, S.; Xu, T.; Huang, J.; Yang, Y.; Ma, L.; Li, F. Sub-meter spatial resolution phase-sensitive optical time-domain reflectometry system using double interferometers. Appl. Sci. 2018, 8, 1899. [Google Scholar] [CrossRef]
- Masoudi, A.; Newson, P.T. High spatial resolution distributed optical fiber dynamic strain sensor with enhanced frequency and strain resolution. Opt. Lett. 2017, 42, 290–293. [Google Scholar] [CrossRef]
- Qian, H.; Luo, B.; He, H.; Zhang, X.; Zou, X.; Pan, W.; Yan, L. Phase demodulation based on DCM algorithm in Φ-OTDR with self-interference balance detection. IEEE Photonics Technol. Lett. 2020, 32, 473–476. [Google Scholar] [CrossRef]
- Fang, G.; Xu, T.; Feng, S.; Li, F. Phase-sensitive optical time domain reflectometer based on phase-generated carrier algorithm. J. Lightw. Technol. 2015, 33, 2811–2816. [Google Scholar] [CrossRef]
- Muanenda, Y.; Faralli, S.; Oton, J.C.; Di Pasquale, F. Dynamic phase extraction in a modulated double-pulse ϕ-OTDR sensor using a stable homodyne demodulation in direct detection. Opt. Express 2018, 26, 687–701. [Google Scholar] [CrossRef]
- Hou, C.; Liu, G.; Guo, S.; Tian, S.; Yuan, Y. Large dynamic range and high sensitivity PGC demodulation technique for tri-component fiber optic seismometer. IEEE Access 2020, 8, 15085–15092. [Google Scholar] [CrossRef]
- Gabai, H.; Eyal, A. On the sensitivity of distributed acoustic sensing. Opt. Lett. 2016, 41, 5648–5651. [Google Scholar] [CrossRef]
- Gabai, H.; Eyal, A. How to specify and measure sensitivity in distributed acoustic sensing (DAS)? In Proceeding of the 2017 25th Optical Fiber Sensors Conference (OFS), Jeju, Republic of Korea, 24–28 April 2017.
- Lu, X.; Soto, A.S.; Thomas, J.P.; Kolltveit, E. Evaluating phase errors in phase-sensitive optical time-domain reflectometry based on I/Q demodulation. J. Lightw. Technol. 2020, 38, 4133–4141. [Google Scholar] [CrossRef]
- Lu, X.; Krebber, K. Characterizing detection noise in phase-sensitive optical time domain reflectometry. Opt. Express 2021, 29, 18791–18806. [Google Scholar] [CrossRef]
- Lu, X.; Krebber, K. Phase error analysis and unwrapping error suppression in phase-sensitive optical time domain reflectometry. Opt. Express 2022, 30, 6934–6948. [Google Scholar] [CrossRef]
- Zhang, W.; Lu, P.; Qu, Z.; Zhang, J.; Wu, Q.; Liu, D. Passive homodyne phase demodulation technique based on LF-TIT-DCM algorithm for interferometric sensors. Sensors 2021, 21, 8257. [Google Scholar] [CrossRef]
- Martins, H.F.; Martin-Lopez, S.; Corredera, P.; Filograno, L.M.; Frazão, O.; González-Herráez, M. Coherent noise reduction in high visibility phase-sensitive optical time domain reflectometer for distributed sensing of ultrasonic waves. J. Lightw. Technol. 2013, 31, 3631–3637. [Google Scholar] [CrossRef]
- Lv, Y.; Wang, P.; Wang, Y.; Liu, X.; Bai, Q.; Li, P.; Zhang, H.; Gao, Y.; Jin, B. Eliminating phase drift for distributed optical fiber acoustic sensing system with empirical mode decomposition. Sensors 2019, 19, 5392. [Google Scholar] [CrossRef]
- Rouaud, M. Correlation and Independence. In Probability, Statistics and Estimation: Propagation of Uncertainties in Experimental Measurement; Lulu: Morrisville, NC, USA, 2017; pp. 47–100. [Google Scholar]
- Martins, F.H.; Martin-Lopez, S.; Corredera, P.; Salgado, P.; Frazão, O.; González-Herráez, M. Modulation instability-induced fading in phase-sensitive optical time-domain reflectometry. Opt. Lett. 2013, 38, 872–874. [Google Scholar] [CrossRef]
- Lu, X.; Soto, A.M.; Zhang, L.; Thévenaz, L. Spectral properties of the signal in phase-sensitive optical time-domain reflectometry with direct detection. J. Lightw. Technol. 2020, 38, 1513–1521. [Google Scholar] [CrossRef]
- Lu, X.; Thomas, J.P. Numerical modelling of φOTDR sensing using a refractive index perturbation approach. J. Lightw. Technol. 2020, 38, 974–980. [Google Scholar] [CrossRef]
- Ku, H.H. Notes on the use of propagation of error formulas. J. Res. Natl. Bur. Stand. 1966, 70, 263–273. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, X.; Thomas, P.J. Phase Error Evaluation via Differentiation and Cross-Multiplication Demodulation in Phase-Sensitive Optical Time-Domain Reflectometry. Photonics 2023, 10, 514. https://doi.org/10.3390/photonics10050514
Lu X, Thomas PJ. Phase Error Evaluation via Differentiation and Cross-Multiplication Demodulation in Phase-Sensitive Optical Time-Domain Reflectometry. Photonics. 2023; 10(5):514. https://doi.org/10.3390/photonics10050514
Chicago/Turabian StyleLu, Xin, and Peter James Thomas. 2023. "Phase Error Evaluation via Differentiation and Cross-Multiplication Demodulation in Phase-Sensitive Optical Time-Domain Reflectometry" Photonics 10, no. 5: 514. https://doi.org/10.3390/photonics10050514
APA StyleLu, X., & Thomas, P. J. (2023). Phase Error Evaluation via Differentiation and Cross-Multiplication Demodulation in Phase-Sensitive Optical Time-Domain Reflectometry. Photonics, 10(5), 514. https://doi.org/10.3390/photonics10050514