Segmented Four-Element Photodiodes in a Three-Dimensional Laser Beam Angle Measurement

 and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
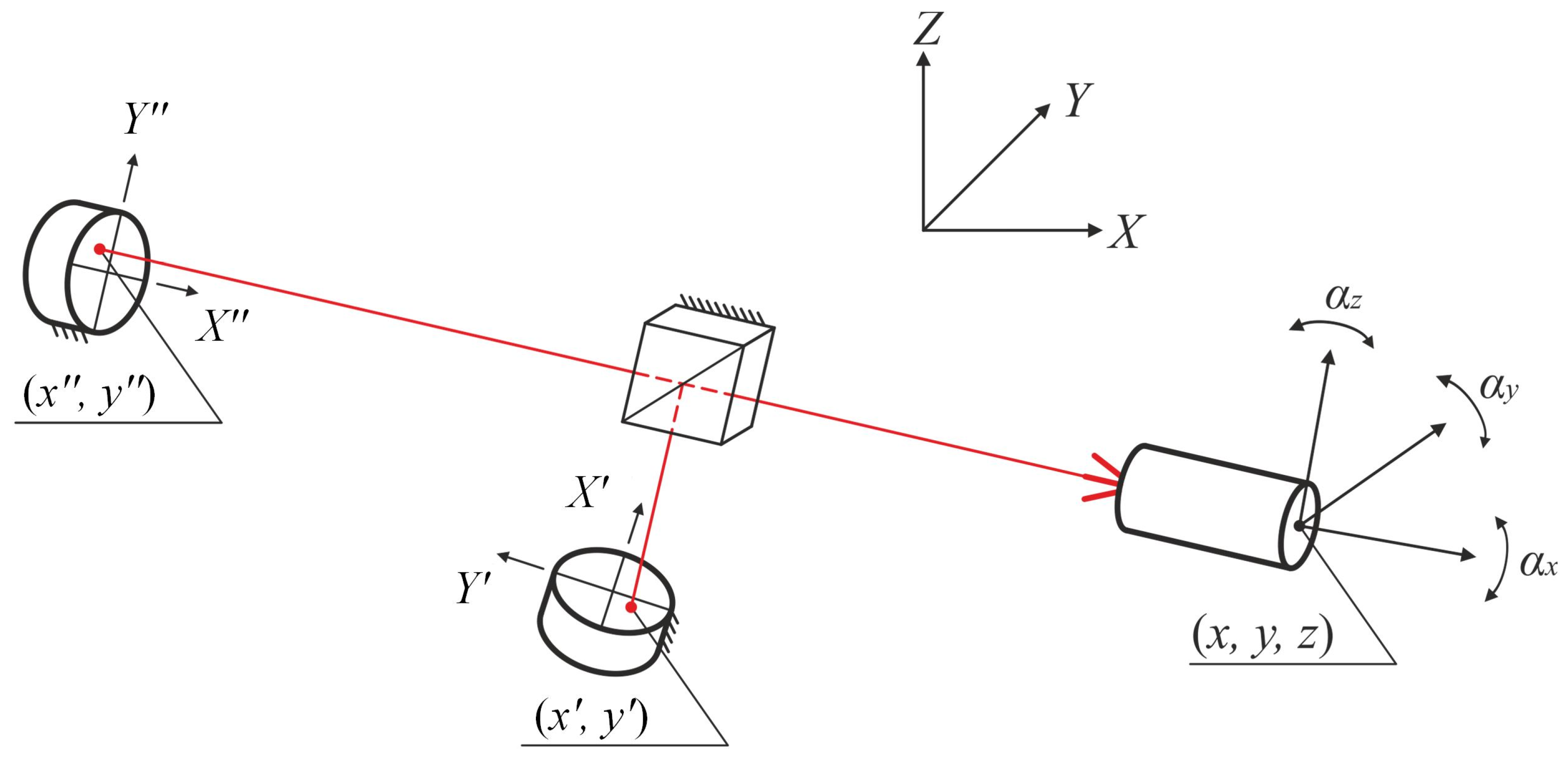
2.1. Measuring Method
2.2. Measurement Circuit Diagram
2.3. Mathematical Model
3. Results and Discussion
3.1. Experimental Stand
3.2. Software and Calibration
3.3. Experimental Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Abbreviation | Description |
| CCD | Charge-coupled device |
| QPD | Quadrant segmented photodiode |
| ADC | Analog to digital converter |
| LSM | Least square method |
| CNC | Computer numeric control |
References
- Gao, W.; Kim, S.W.; Bosse, H.; Haitjema, H.; Chen, Y.L.; Lu, X.D.; Knapp, W.; Weckenmann, A.; Estler, W.T.; Kunzmann, H. Measurement technologies for precision positioning. CIRP Ann. 2015, 64, 773–796. [Google Scholar] [CrossRef]
- Su, X.; Zhang, Q. Dynamic 3-D shape measurement method: A review. Opt. Lasers Eng. 2010, 48, 191–204. [Google Scholar] [CrossRef]
- Konov, S.G. Mobile contact-type coordinate-measurement system based on a photogrammetric system. Meas. Tech. 2010, 53, 149–152. [Google Scholar] [CrossRef]
- Khuc, T.; Catbas, F.N. Computer vision-based displacement and vibration monitoring without using physical target on structures. Struct. Infrastruct. Eng. 2017, 13, 505–516. [Google Scholar] [CrossRef]
- Fan, W.; Qiao, P. Vibration-based Damage Identification Methods: A Review and Comparative Study. Struct. Health Monit. 2011, 10, 83–111. [Google Scholar] [CrossRef]
- Cincotta, S.; Neild, A.; He, C.; Armstrong, J. Visible Light Positioning Using an Aperture and a Quadrant Photodiode. In Proceedings of the IEEE Globecom Workshops (GC Wkshps), Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Chong, K.K.; Yew, T.K. Novel Optical Scanner Using Photodiodes Array for Two-Dimensional Measurement of Light Flux Distribution. IEEE Trans. Instrum. Meas. 2011, 60, 2918–2925. [Google Scholar] [CrossRef]
- Song, Y.; Bhushan, B. Atomic-scale topographic and friction force imaging and cantilever dynamics in friction force microscopy. Phys. Rev. B 2006, 74, 165401. [Google Scholar] [CrossRef] [Green Version]
- Klochkova, V.; Sheldakova, J.; Galaktionov, I.; Nikitin, A.; Kudryashov, A.; Belousov, V.; Rukosuev, A. Local Correction of the Light Position Implemented on an FPGA Platform for a 6 Meter Telescope. Photonics 2022, 9, 322. [Google Scholar] [CrossRef]
- Kudryashov, A.; Alexandrov, A.; Rukosuev, A.; Samarkin, V.; Galarneau, P.; Turbide, S.; Châteauneuf, F. Extremely high-power CO2 laser beam correction. Appl. Opt. 2015, 54, 4352–4358. [Google Scholar] [CrossRef]
- Konov, S.G.; Krutov, A.V. Development of a system for tracking the spatial movements of objects based on the technology of photogrammetry. Meas. Tech. 2014, 56, 1386–1389. [Google Scholar] [CrossRef]
- Riveiro, B.; González-Jorge, H.; Varela, M.; Jauregui, D.V. Validation of terrestrial laser scanning and photogrammetry techniques for the measurement of vertical underclearance and beam geometry in structural inspection of bridges. Measurement 2013, 46, 784–794. [Google Scholar] [CrossRef]
- Rayas, J.A.; León-Rodríguez, M.; Martínez-García, A.; Genovese, K.; Medina, O.M.; Cordero, R.R. Using a single-cube beam-splitter as a fringe pattern generator within a structured-light projection system for surface metrology. Opt. Eng. 2017, 56, 044103. [Google Scholar] [CrossRef]
- Roa, J.; Oncins, G.; Diaz, J.; Sanz, F.; Segarra, M. Calculation of Young’s Modulus Value by Means of AFM. Recent Pat. Nanotechnol. 2011, 5, 27–36. [Google Scholar] [CrossRef] [PubMed]
- Ishola, F.; Cho, M. Experimental Study on Photodiode Array Sensor Aided MEMS Fine Steering Mirror Control for Laser Communication Platforms. IEEE Access 2021, 9, 100197–100207. [Google Scholar] [CrossRef]
- Zečević, N.; Hofbauer, M.; Goll, B.; Zimmermann, H.; Tondini, S.; Chalyan, A.; Fontana, G.; Pavesi, L.; Testa, F.; Stracca, S.; et al. A 3D Photonic-Electronic Integrated Transponder Aggregator with 48 × 16 Heater Control Cells. IEEE Photonics Technol. Lett. 2018, 30, 681–684. [Google Scholar] [CrossRef]
- Iosifidis, D.; Koivisto, T. Scale Transformations in Metric-Affine Geometry. Universe 2019, 5, 82. [Google Scholar] [CrossRef] [Green Version]
- Du, Z.-G.; Pan, J.-S.; Chu, S.-C.; Luo, H.-J.; Hu, P. Quasi-Affine Transformation Evolutionary Algorithm with Communication Schemes for Application of RSSI in Wireless Sensor Networks. IEEE Access 2020, 8, 8583–8594. [Google Scholar] [CrossRef]
- Meng, Z.; Pan, J.-S.; Xu, H. QUasi-affine transformation evolutionary (QUATRE) algorithm: A cooperative swarm based algorithm for global optimization. Knowl-Based Syst. 2016, 109, 104–121. [Google Scholar] [CrossRef]
- Dong, H.-W.; Su, X.-X.; Wang, Y.-S.; Zhang, C. Topological optimization of two-dimensional phononic crystals based on the finite element method and genetic algorithm. Struct. Multidiscip. Optim. 2014, 50, 593–604. [Google Scholar] [CrossRef]
- Jaanus, M.; Udal, A.; Kukk, V.; Umbleja, K. Using Microcontrollers for High Accuracy Analogue Measurements. Elektron. Ir Elektrotech. 2013, 19, 51–54. [Google Scholar] [CrossRef] [Green Version]
- Grigoriev, S.N.; Martinov, G.M. An ARM-based Multi-channel CNC Solution for Multi-tasking Turning and Milling Machines. Procedia CIRP 2016, 46, 525–528. [Google Scholar] [CrossRef] [Green Version]
- Sharma, M.; Agarwal, N.; Reddy, S.R.N. Design and development of daughter board for USB-UART communication between Raspberry Pi and PC. In Proceedings of the International Conference on Computing, Communication & Automation, Greater Noida, India, 15–16 May 2015; pp. 944–948. [Google Scholar]
- Grigoriev, S.N.; Emelianov, P.N.; Masterenko, D.A.; Ped’, S.E. Sampling by Variables for Rayleigh Distributed Lots. Meas. Tech. 2022, 65, 417–425. [Google Scholar] [CrossRef]
- Barrett, S.F.; Pack, D.J. Microchip AVR Operating Parameters and Interfacing. In Microchip AVR Microcontroller Primer: Programming and Interfacing; Synthesis Lectures on Digital Circuits & Systems; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Gao, W.; Shi, H.; Tang, Q. A Contactless Planar Inductive Sensor for Absolute Angular Displacement Measurement. IEEE Access 2021, 9, 160878–160886. [Google Scholar] [CrossRef]
- Goyal, D.; Pabla, B.S. The Vibration Monitoring Methods and Signal Processing Techniques for Structural Health Monitoring: A Review. Arch. Comput. Methods Eng. 2016, 23, 585–594. [Google Scholar] [CrossRef]
- Grigoriev, S.N.; Masterenko, D.A.; Teleshevskii, V.I.; Emelyanov, P.N. Contemporary state and outlook for development of metrological assurance in the machine-building industry. Meas. Tech. 2013, 55, 1311. [Google Scholar] [CrossRef]
- Grigoriev, S.N.; Martinov, G.M. The Control Platform for Decomposition and Synthesis of Specialized CNC Systems. Procedia CIRP 2016, 41, 858–863. [Google Scholar] [CrossRef] [Green Version]
- Grigoriev, S.N.; Martinov, G.M. Research and development of a cross-platform CNC kernel for multi-axis machine tool. Procedia CIRP 2014, 14, 517–522. [Google Scholar] [CrossRef] [Green Version]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Konov, S.; Frolov, A.; Shapovalov, P.; Peretyagin, P.; Grigoriev, S. Segmented Four-Element Photodiodes in a Three-Dimensional Laser Beam Angle Measurement. Photonics 2023, 10, 704. https://doi.org/10.3390/photonics10070704
Konov S, Frolov A, Shapovalov P, Peretyagin P, Grigoriev S. Segmented Four-Element Photodiodes in a Three-Dimensional Laser Beam Angle Measurement. Photonics. 2023; 10(7):704. https://doi.org/10.3390/photonics10070704
Chicago/Turabian StyleKonov, Stanislav, Aleksander Frolov, Petr Shapovalov, Pavel Peretyagin, and Sergey Grigoriev. 2023. "Segmented Four-Element Photodiodes in a Three-Dimensional Laser Beam Angle Measurement" Photonics 10, no. 7: 704. https://doi.org/10.3390/photonics10070704
APA StyleKonov, S., Frolov, A., Shapovalov, P., Peretyagin, P., & Grigoriev, S. (2023). Segmented Four-Element Photodiodes in a Three-Dimensional Laser Beam Angle Measurement. Photonics, 10(7), 704. https://doi.org/10.3390/photonics10070704