Online Denoising Single-Pixel Imaging Using Filtered Patterns


Abstract
:1. Introduction
2. Theory
3. Numerical Simulation and Experiment Results
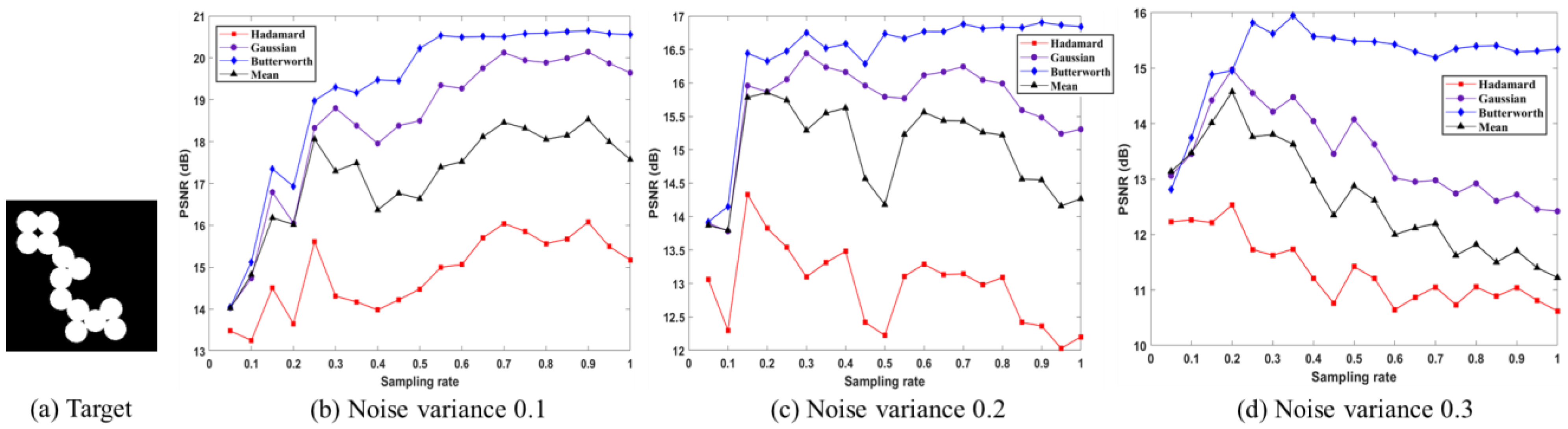
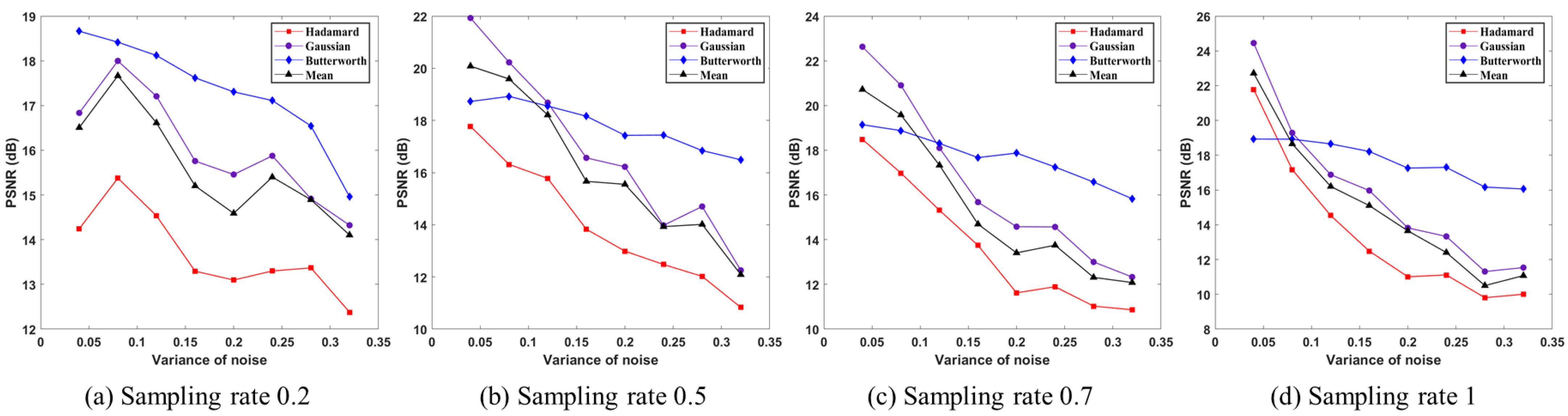
3.1. The Impacts of Sampling Rate, Noise Intensity, and Filtering Template on the Performance of ODSPI
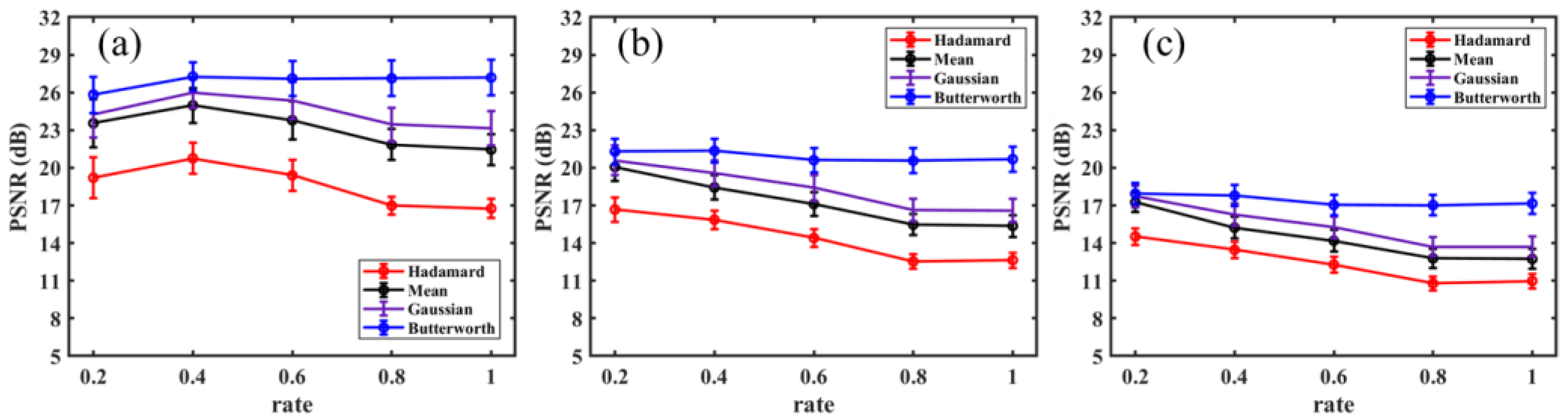
3.2. Time Advantage and Performance Analysis
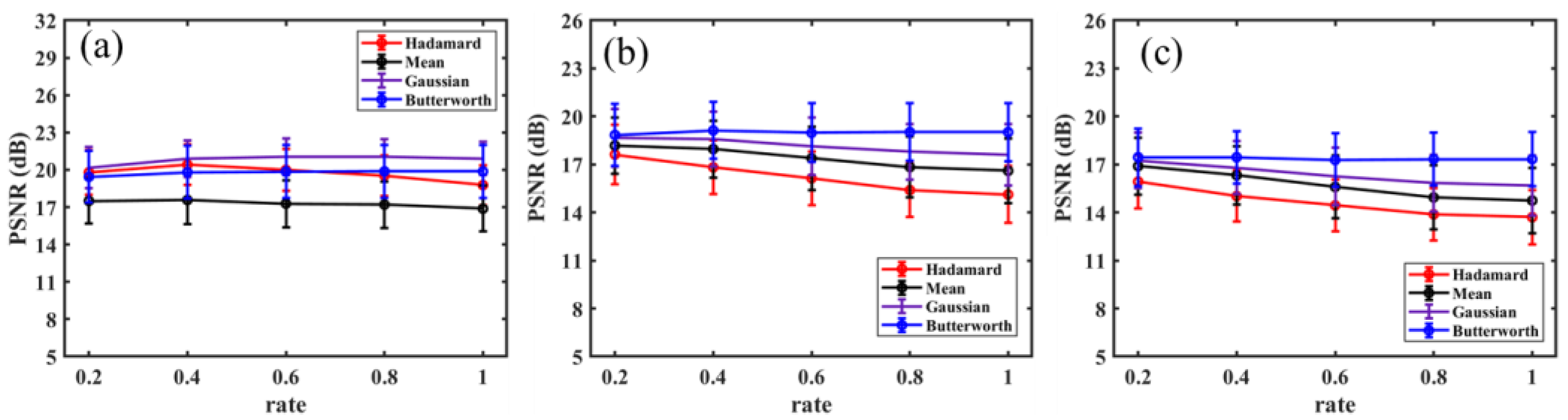
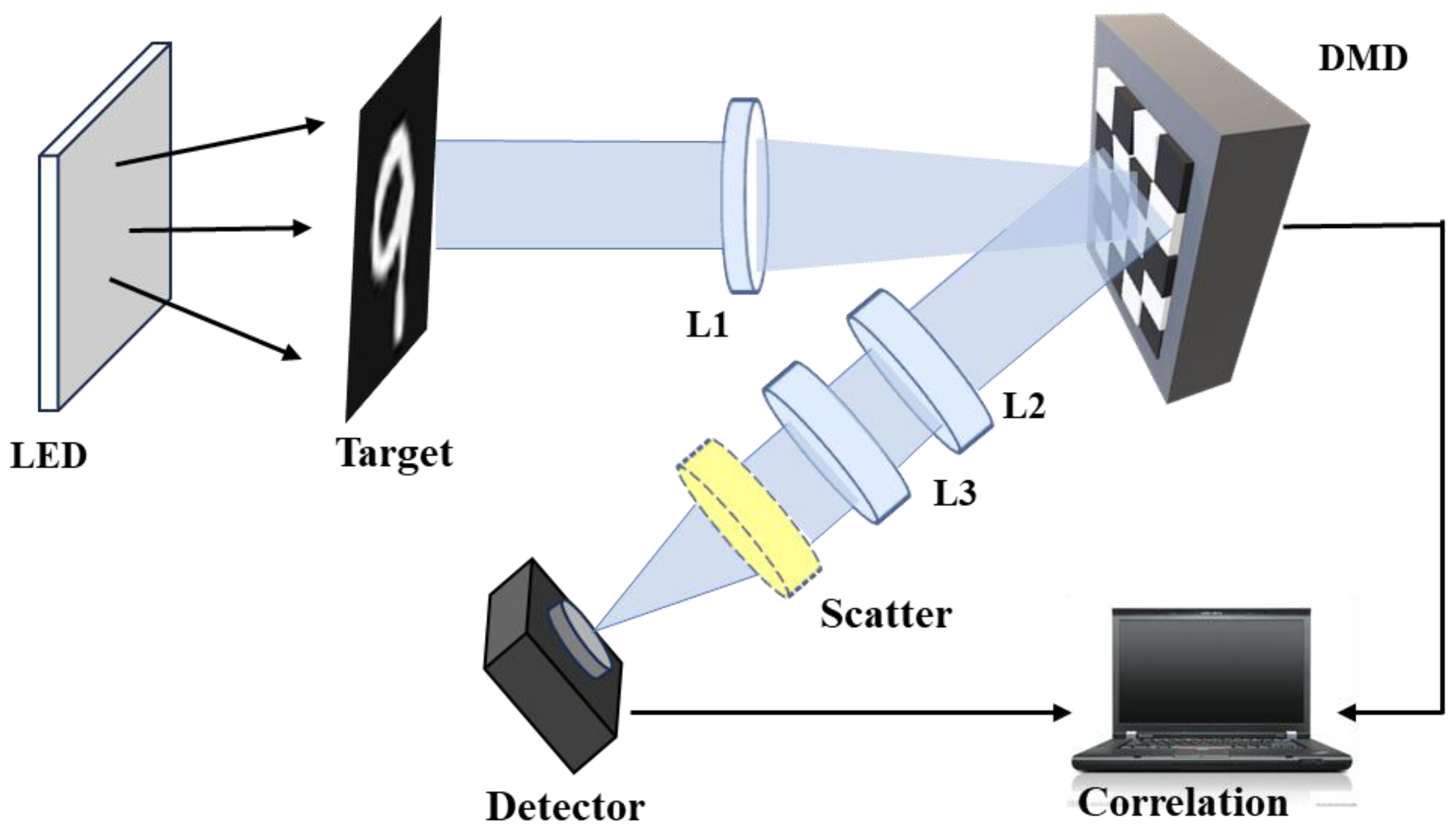
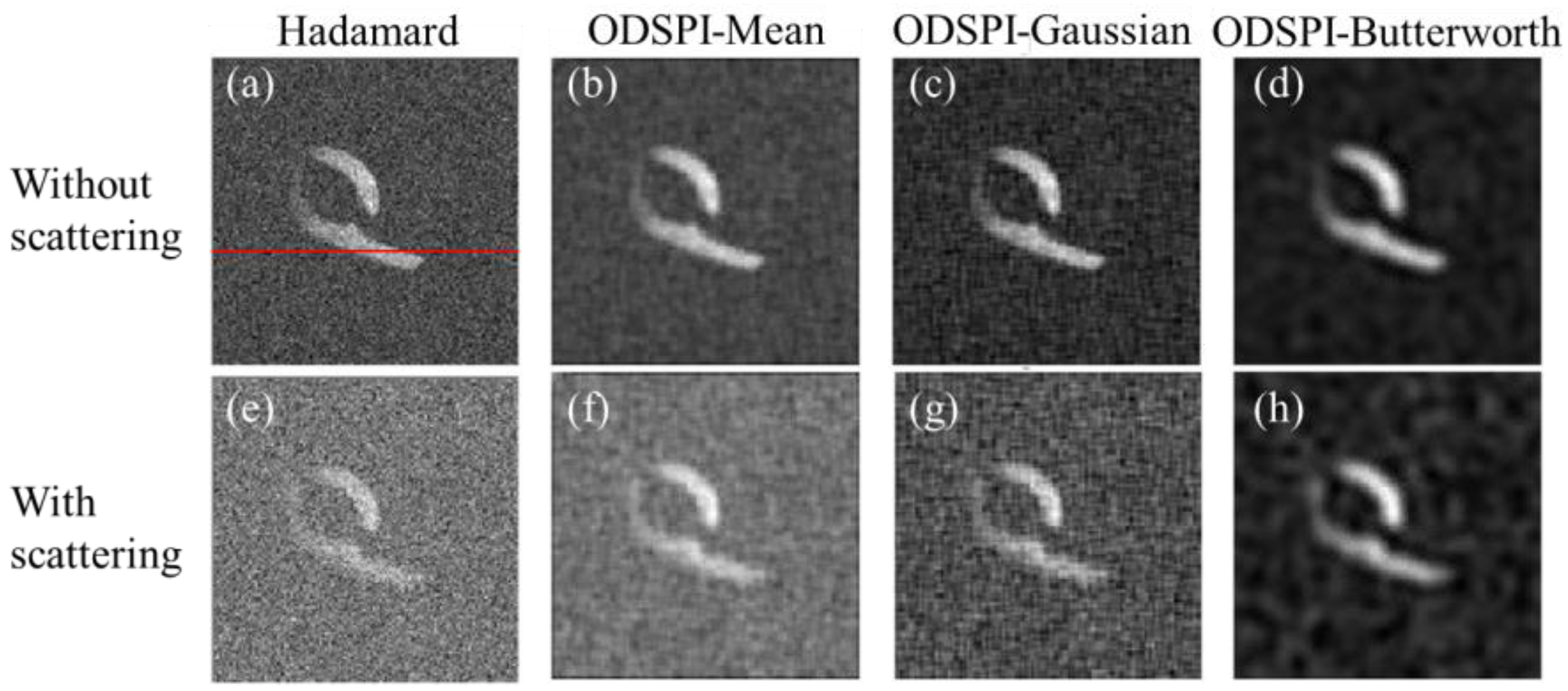
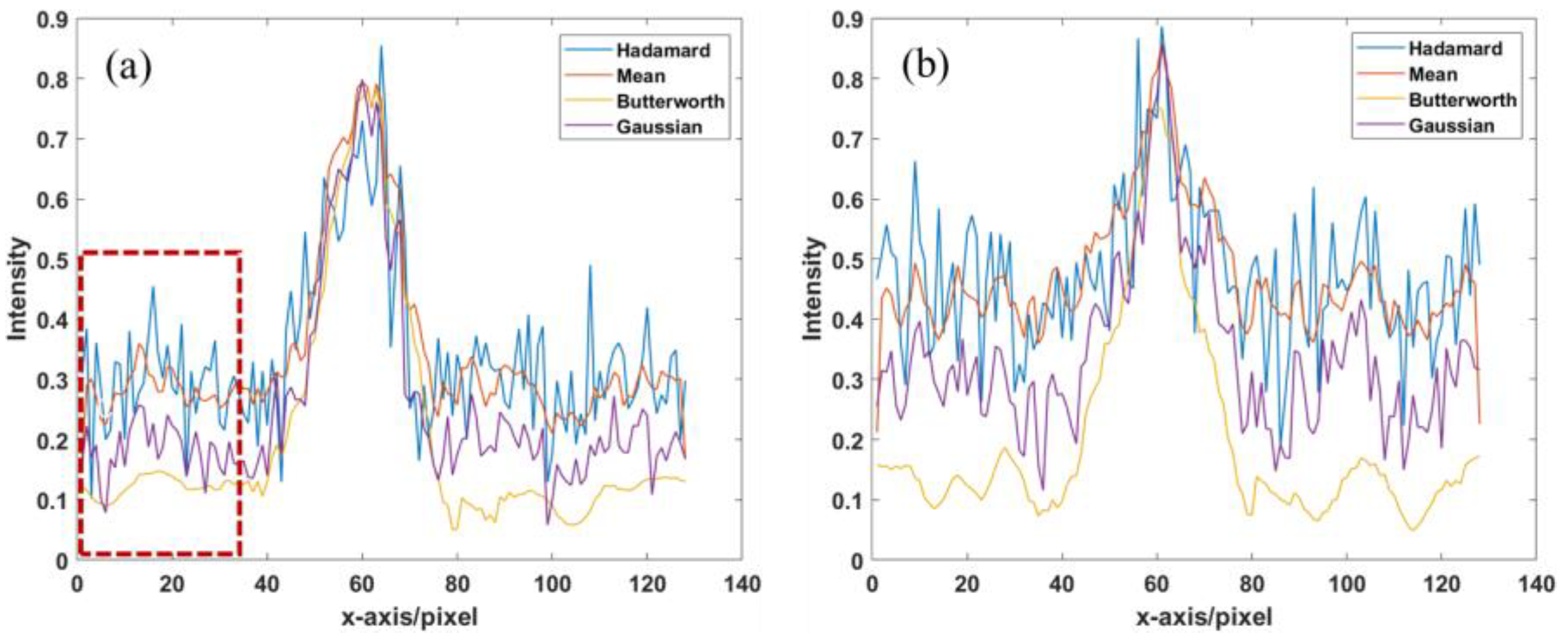
3.3. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pittman, T.B.; Shih, Y.H.; Strekalov, D.V.; Sergienko, A.V. Optical Imaging By Means of Two-Photon Quantum Entanglement. Phys. Rev. A 2002, 52, 3429–3432. [Google Scholar] [CrossRef] [PubMed]
- Shapiro, J.H. Computational Ghost Imaging. Phys. Rev. A 2008, 78, 061802. [Google Scholar] [CrossRef]
- Bennink, R.S.; Bentley, S.J.; Boyd, R.W. “Two-photon” Coincidence Imaging with a Classical Source. Phys. Rev. Lett. 2002, 89, 113601. [Google Scholar] [CrossRef] [PubMed]
- Gong, W.L.; Zhao, C.Q.; Yu, H.; Chen, M.L.; Xu, W.D.; Han, S.S. Three-Dimensional Ghost Imaging Lidar via Sparsity Constraint. Sci. Rep. 2016, 6, 26133. [Google Scholar] [CrossRef] [PubMed]
- Yu, W.K.; Liu, X.F.; Yao, X.R.; Wang, C.; Zhai, Y.; Zhai, G. Complementary Compressive Imaging for the Telescopic System. Sci. Rep. 2014, 4, 5834. [Google Scholar] [CrossRef]
- Zhang, Z.B.; Liu, S.J.; Peng, J.Z.; Yao, M.H.; Zheng, G.A.; Zhong, J.G. Simultaneous Spatial, Spectral, and 3D Compressive Imaging via Efficient Fourier Single-Pixel Measurements. Optica 2018, 5, 315–319. [Google Scholar] [CrossRef]
- Jin, S.J.; Hui, W.W.; Wang, Y.L.; Huang, K.C.; Shi, Q.S.; Ying, C.F.; Liu, D.Q.; Ye, Q.; Zhou, W.Y.; Tian, J.G. Hyperspectral Imaging Using the Single-Pixel Fourier Transform Technique. Sci. Rep. 2017, 7, 45209. [Google Scholar] [CrossRef]
- Greenberg, J.; Krishnamurthy, K.; Brady, D. Compressive Single-Pixel Snapshot X-Ray Diffraction Imaging. Opt. Lett. 2014, 39, 111–114. [Google Scholar] [CrossRef]
- Chan, W.L.; Charan, K.; Takhar, D.; Kelly, K.F.; Baraniuk, R.G.; Mittleman, D.M. A Single-Pixel Terahertz Imaging System Based on Compressed Sensing. Appl. Phys. Lett. 2008, 93, 121105. [Google Scholar] [CrossRef]
- Durán, V.; Soldevila, F.; Irles, E.; Clemente, P.; Tajahuerce, E.; Andrés, P.; Lancis, J. Compressive Imaging in Scattering Media. Opt. Express 2015, 23, 14424–14433. [Google Scholar] [CrossRef]
- Tajahuerce, E.; Durán, V.; Clemente, P.; Irles, E.; Soldevila, F.; Andrés, P.; Lancis, J.l. Image transmission through dynamic scattering media by single-pixel photodetection. Opt. Express 2014, 22, 16945–16955. [Google Scholar] [CrossRef] [PubMed]
- Duarte, M.F.; Davenport, M.A.; Takhar, D.; Laska, J.N.; Sun, T.; Kelly, K.F.; Baraniuk, R.G. Single-pixel imaging via compressive sampling. IEEE Signal Process. Mag. 2008, 25, 83–91. [Google Scholar] [CrossRef]
- Barbastathis, G.; Ozcan, A.; Situ, G. On the use of deep learning for computational imaging. Optica 2019, 6, 921–943. [Google Scholar] [CrossRef]
- Wang, F.; Wang, H.; Wang, H.C.; Li, G.W.; Situ, G.H. Learning from simulation: An end-to-end deep-learning approach for computational ghost imaging. Opt. Express 2019, 27, 25560–25572. [Google Scholar] [CrossRef] [PubMed]
- Jiao, S.M.; Feng, J.; Gao, Y.; Lei, T.; Xie, Z.W.; Yuan, X. COptical machine learning with incoherent light and a single-pixel detector. Opt. Lett. 2019, 44, 5186–5189. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.H.; Sun, Y.Z.; Yan, R.T.; Qu, S.F.; Yu, Y.J.; Zhang, A.X.; Wu, L.A. Noise reduction in computational ghost imaging by interpolated monitoring. Appl. Opt. 2018, 12, 143–159. [Google Scholar] [CrossRef] [PubMed]
- Ferri, F.; Magatti, D.; Lugiato, L.A.; Gatti, A. Differential Ghost Imaging. Phys. Rev. Lett. 2010, 104, 253603. [Google Scholar] [CrossRef]
- Li, M.F.; Zhang, Y.R.; Luo, K.H.; Wu, L.A.; Fan, H. Time-Correspondence Differential Ghost Imaging. Phys. Rev. A 2013, 87, 033813. [Google Scholar] [CrossRef]
- Sun, B.Q.; Welsh, S.S.; Edgar, M.P.; Shapiro, J.H.; Padgett, M.J. Normalized Ghost Imaging. Opt. Express 2012, 20, 16892. [Google Scholar] [CrossRef]
- Yao, X.R.; Yu, W.K.; Liu, X.F.; Li, L.Z.; Li, M.F.; Wu, L.A.; Zhai, G.J. Iterative denoising of ghost imaging. Opt. Express 2014, 22, 24268–24275. [Google Scholar] [CrossRef]
- Wang, W.; Wang, Y.P.; Li, J.; Yang, X.; Wu, Y. Iterative ghost imaging. Opt. Lett. 2014, 39, 5150. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Zhang, H.W.; Zhong, F.; Guo, S.X. Iterative denoising of ghost imaging based on adaptive threshold method. Acta Phys. Sin. 2018, 67, 244201. [Google Scholar] [CrossRef]
- Du, J.; Gong, W.; Han, S. The influence of sparsity property of images on ghost imaging with thermal light. Opt. Lett. 2012, 37, 1067–1069. [Google Scholar] [CrossRef] [PubMed]
- Wang, G.; Zheng, H.; Wang, W.; He, Y.; Liu, J.; Chen, H.; Xu, Z. Denoising ghost imaging via principal components analysis and compandor. Opt. Lasers Eng. 2018, 110, 236–243. [Google Scholar] [CrossRef]
- Guan, Q.; Deng, H.; Gao, X.; Zhong, X.; Ma, M.; Gong, X. Source separation and noise reduction in single-pixel imaging. Opt. Lasers Eng. 2023, 170, 107773. [Google Scholar] [CrossRef]
- Wu, H.; Wang, R.; Zhao, G.; Xiao, H.; Liang, J.; Wang, D.; Tian, X.B.; Cheng, L.L.; Zhang, X.M. Deep-learning denoising computational ghost imaging. Opt. Lasers Eng. 2020, 134, 106183. [Google Scholar] [CrossRef]
- Hu, H.K.; Sun, S.; Lin, H.Z.; Jiang, L.; Liu, W.T. Denoising ghost imaging under a small sampling rate via deep learning for tracking and imaging moving objects. Opt. Express 2020, 28, 37284–37293. [Google Scholar] [CrossRef]
- Chen, L.Y.; Wang, C.; Xiao, X.Y.; Ren, C.; Zhang, D.J.; Li, Z.; Cao, D.Z. Denoising in SVD-based ghost imaging. Opt. Express 2022, 30, 6248–6257. [Google Scholar] [CrossRef]
- Pronina, V.; Mur, A.L.; Abascal, J.F.; Peyrin, F.; Dylov, D.V.; Ducros, N. 3D denoised completion network for deep single-pixel reconstruction of hyperspectral images. Opt. Express 2021, 29, 39559–39573. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2008; pp. 291–308. [Google Scholar]
- Yu, W.K. Super sub-Nyquist single-pixel imaging by means of cake-cutting Hadamard basis sort. Sensors 2019, 19, 4122. [Google Scholar] [CrossRef]
- Zhen, J.H.; Yu, X.D.; Zhao, S.M.; Wang, L. Ghost Imaging Denoising Based on Mean Filtering. Acta Opt. Sin. 2022, 42, 2211002. [Google Scholar]
- LeCun, Y.; Cortes, C.; Burges, C. MNIST Handwritten Digit Database. AT&T Labs. 2010. Available online: http://yann.lecun.com/exdb/mnist (accessed on 30 May 2018).
- Coates, A.; Ng, A.; Lee, H. An analysis of single-layer networks in unsupervised feature learning. In Proceedings of the Fourteenth International Conference on Artificial Intelligence and Statistics, Fort Lauderdale, FL, USA, 11–13 April 2011. [Google Scholar]
- Zhang, Z.B.; Wang, X.Y.; Zheng, G.A.; Zhong, J.G. Fast Fourier single-pixel imaging via binary illumination. Sci. Rep. 2017, 7, 12029. [Google Scholar] [CrossRef] [PubMed]
- Ota, S.; Horisaki, R.; Kawamura, Y.; Ugawa, M.; Sato, I.; Hashimoto, K.; Noji, H. Ghost cytometry. Science 2018, 360, 1246–1251. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filter Scheme | Noise Level | Hadamard | Mean | Gaussian | Butterworth |
|---|---|---|---|---|---|
| ODSPI | without scattering | 0.303 | 0.283 | 0.174 | 0.124 |
| with scattering | 0.46 | 0.425 | 0.285 | 0.136 | |
| Post-filtering | without scattering | 0.303 | 0.276 | 0.192 | 0.103 |
| with scattering | 0.46 | 0.387 | 0.2719 | 0.133 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Chen, X.; Zhao, Z.; Wu, L.; Yu, Y. Online Denoising Single-Pixel Imaging Using Filtered Patterns. Photonics 2024, 11, 59. https://doi.org/10.3390/photonics11010059
Yang Z, Chen X, Zhao Z, Wu L, Yu Y. Online Denoising Single-Pixel Imaging Using Filtered Patterns. Photonics. 2024; 11(1):59. https://doi.org/10.3390/photonics11010059
Chicago/Turabian StyleYang, Zhaohua, Xiang Chen, Zhihao Zhao, Lingan Wu, and Yuanjin Yu. 2024. "Online Denoising Single-Pixel Imaging Using Filtered Patterns" Photonics 11, no. 1: 59. https://doi.org/10.3390/photonics11010059
APA StyleYang, Z., Chen, X., Zhao, Z., Wu, L., & Yu, Y. (2024). Online Denoising Single-Pixel Imaging Using Filtered Patterns. Photonics, 11(1), 59. https://doi.org/10.3390/photonics11010059