Image Processing for Laser Imaging Using Adaptive Homomorphic Filtering and Total Variation


Abstract
:1. Introduction
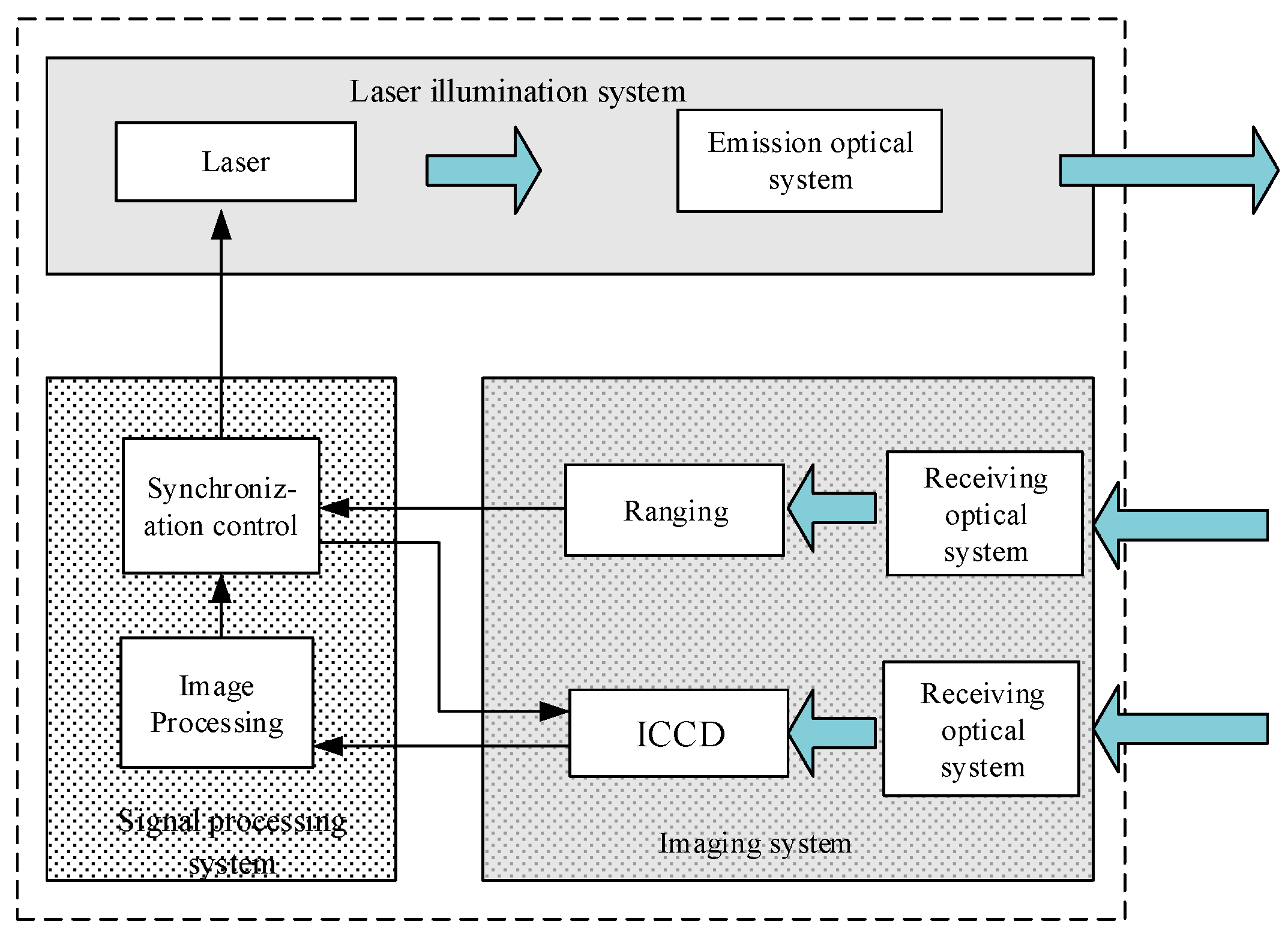
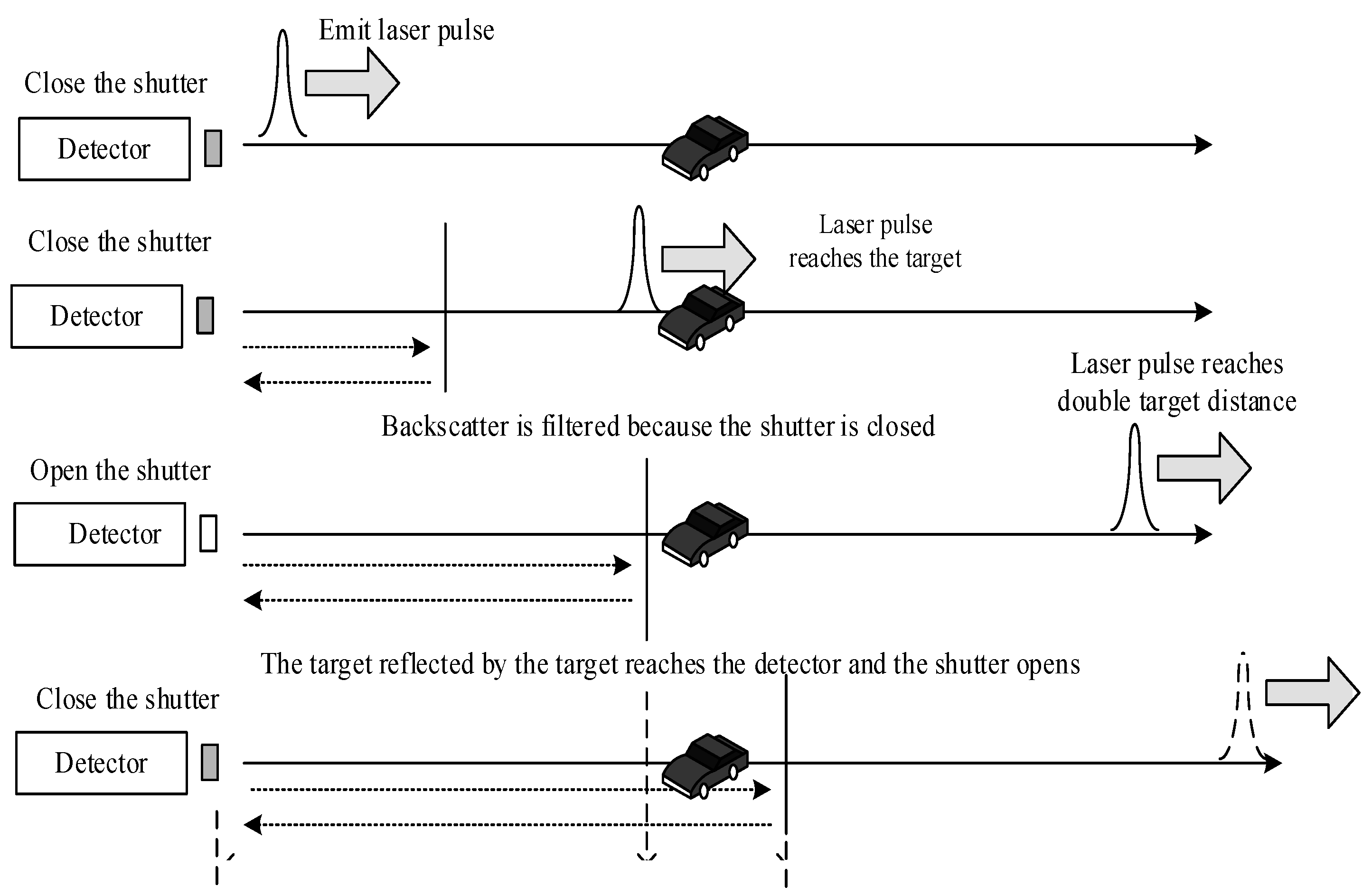
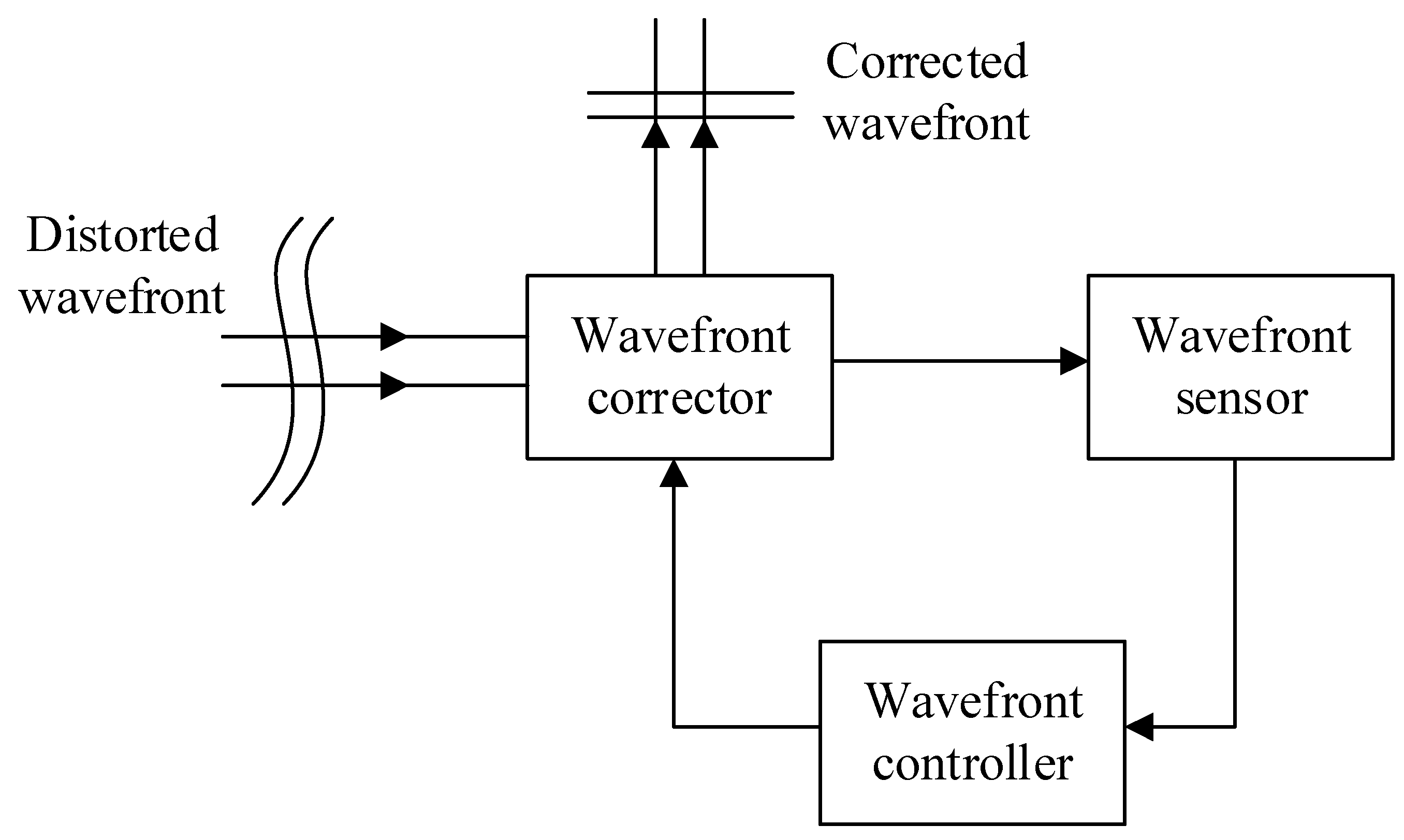
2. Range-Gated Imaging System
3. Adaptive Homomorphic Filtering
3.1. Homomorphic Filtering Algorithm
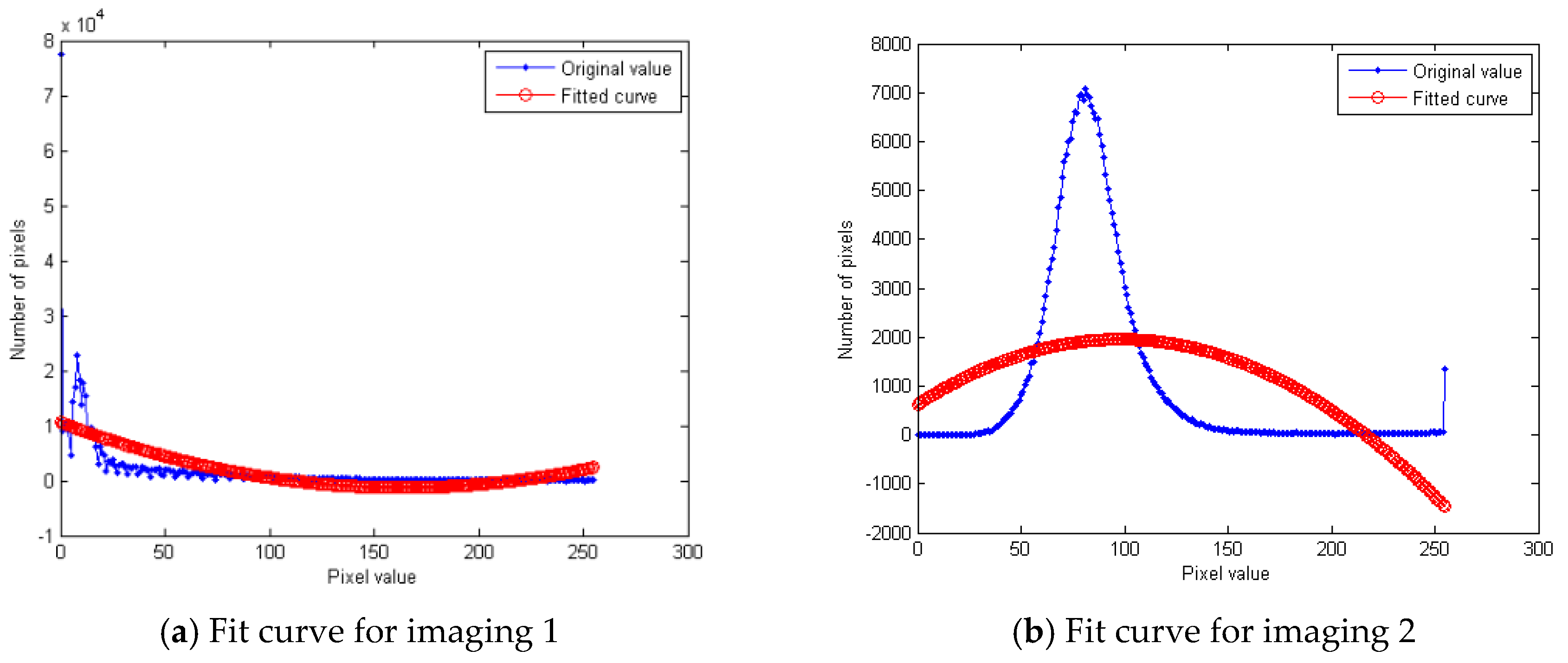
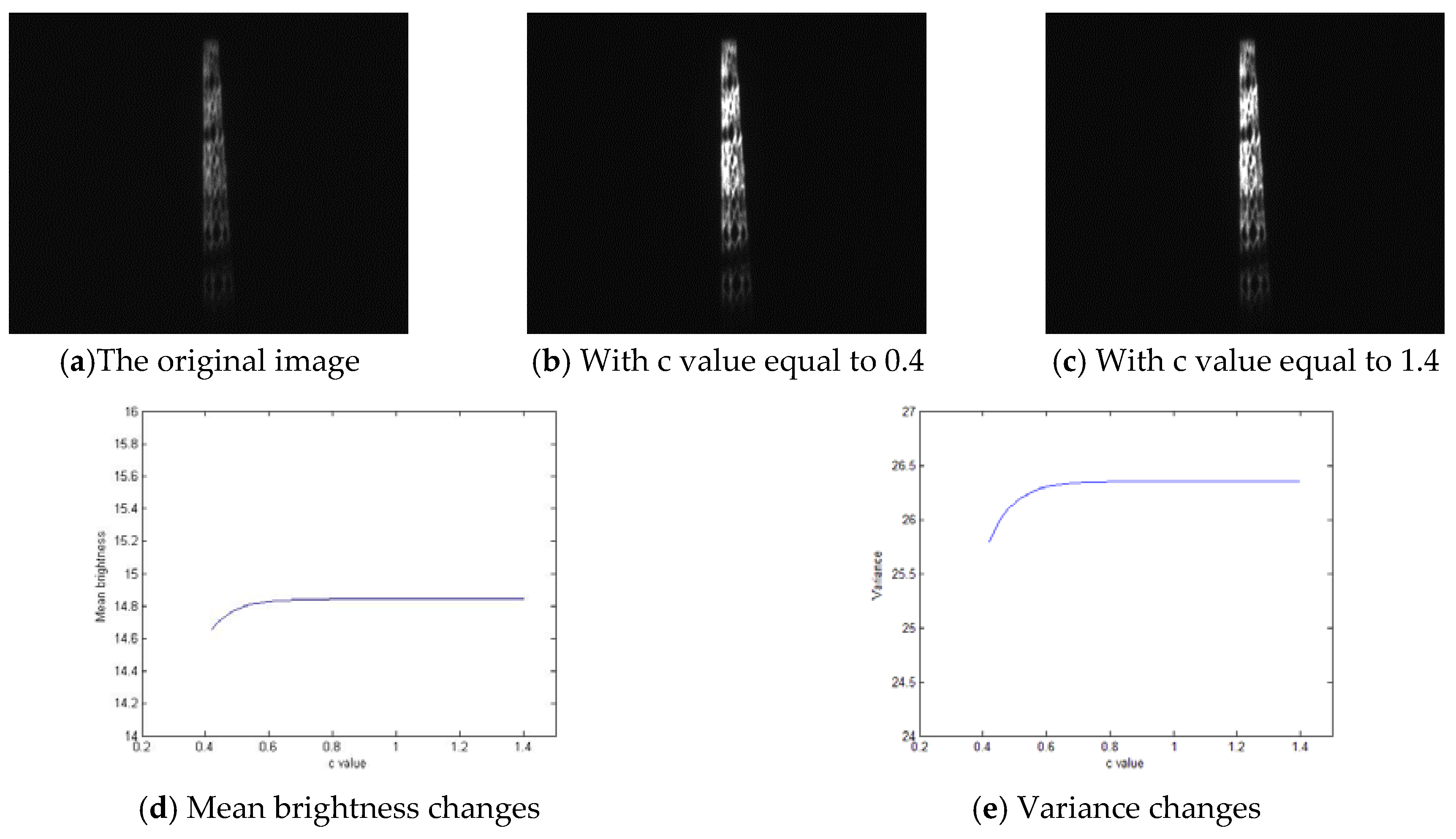
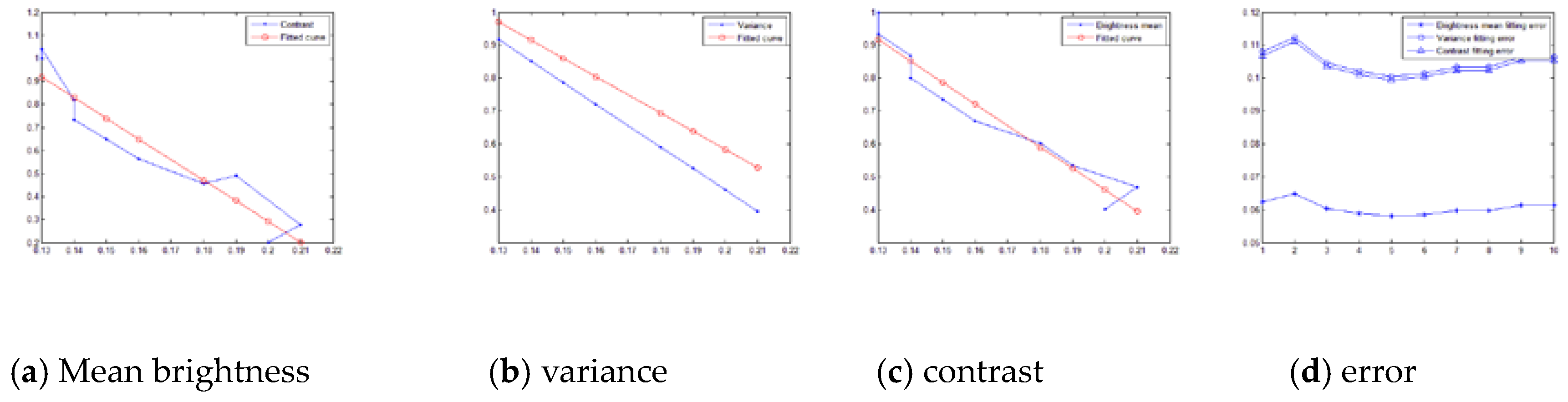
3.2. Adaptive Homomorphic Filtering Algorithm
4. Total Variation Noise Reduction Model
5. Experimental Results and Analysis
5.1. Algorithm Flow
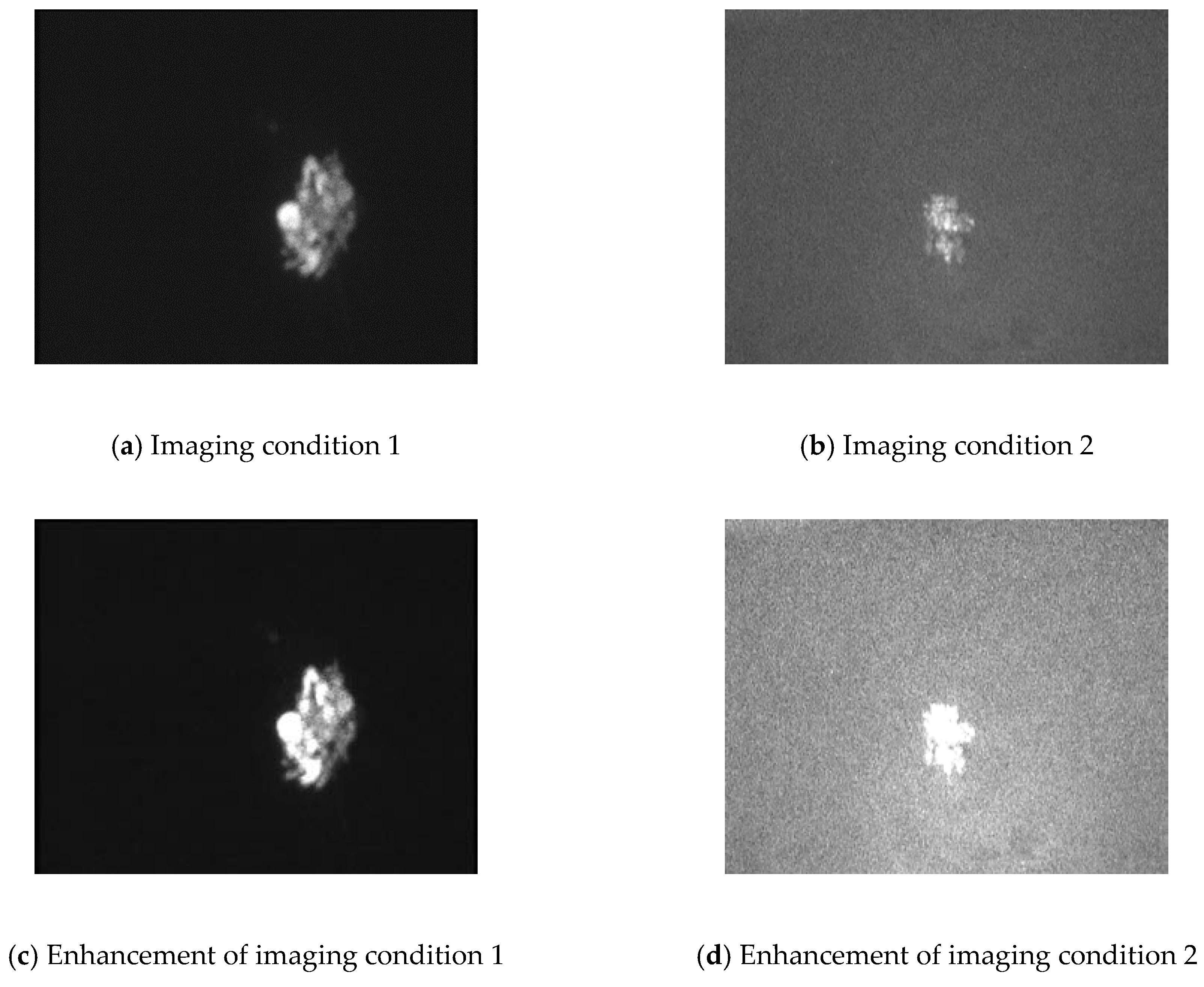
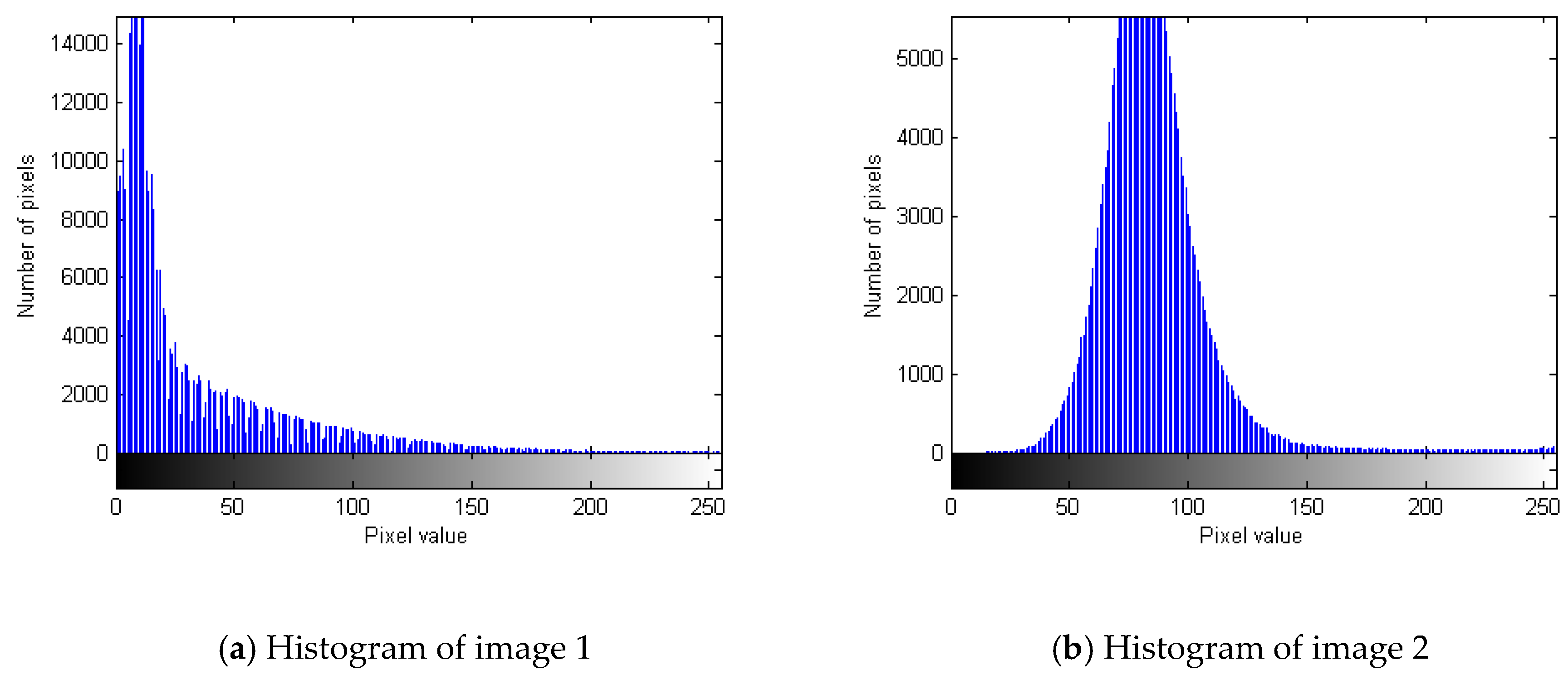
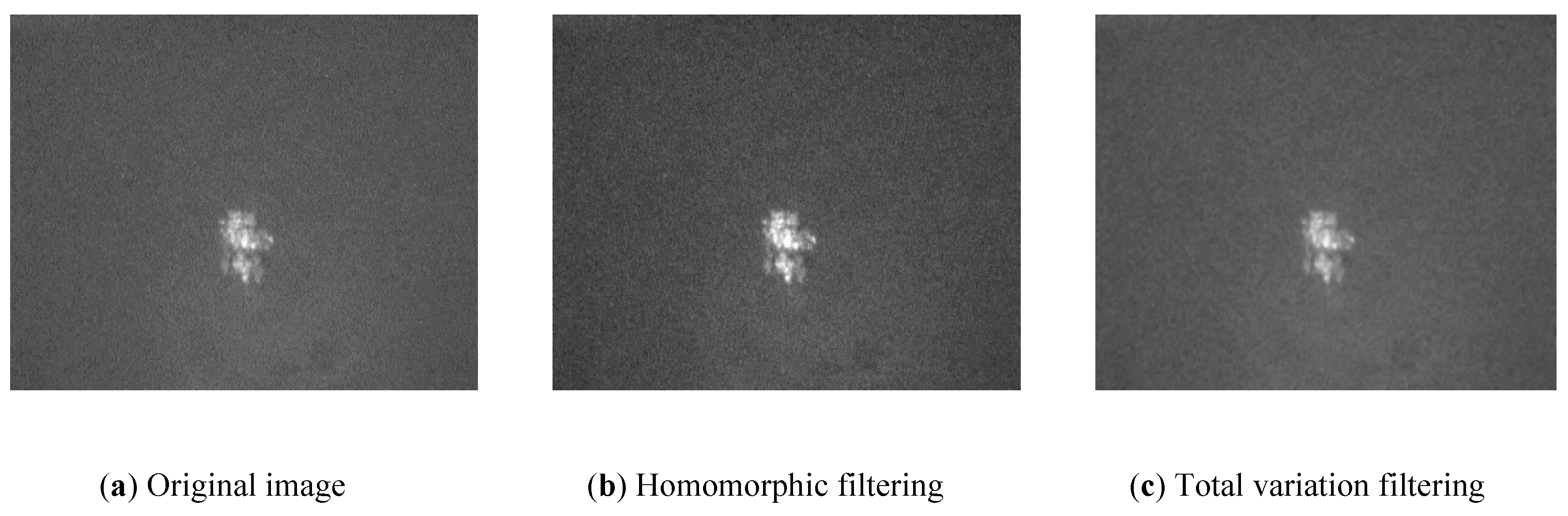
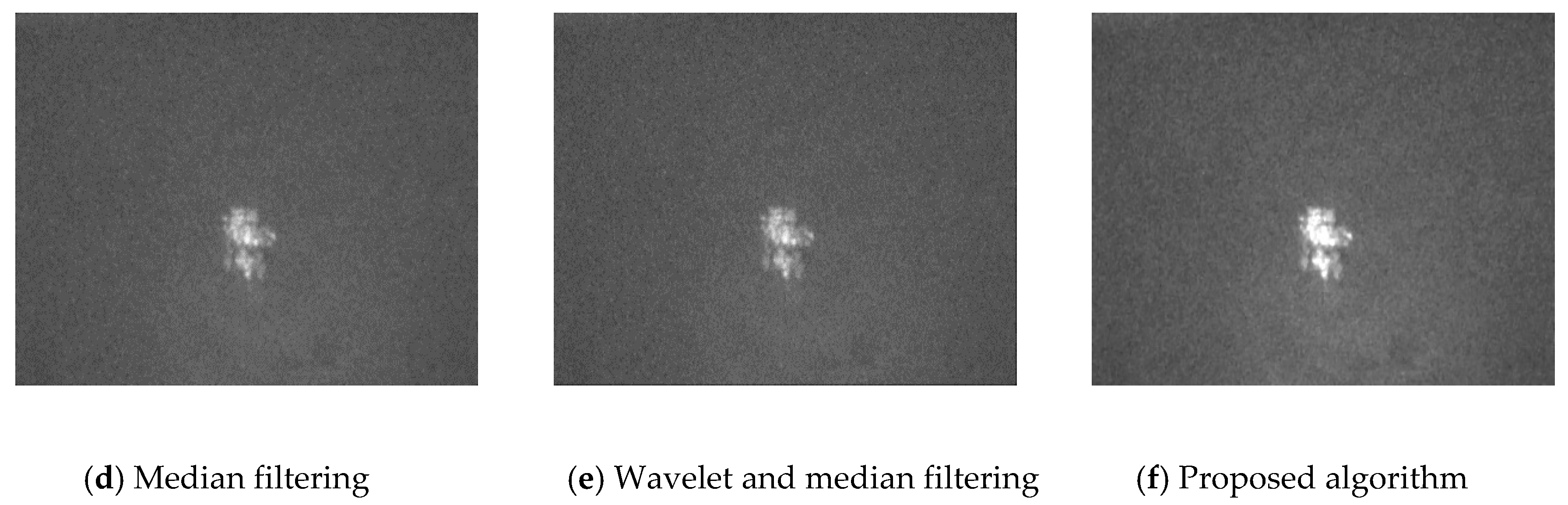
5.2. Processing of Class I Images
5.3. Processing of Type II Images
6. Conclusions
7. Future Work Prospects
Author Contributions
Funding
Conflicts of Interest
References
- Chen CL, P.; Liu, L.; Chen, L.; Tang, Y.Y.; Zhou, Y. Weighted Couple Sparse Representation with Classified Regularization for Impulse Noise Removal. IEEE Trans. Image Process. 2015, 24, 4014–4026. [Google Scholar] [CrossRef] [PubMed]
- Minru, B.; Shihuan, G. TV-MCP:A New Method for Image Restoration in the Presence of Impulse Noise. Ournal Hunan Univ. (Nat. Sci.) 2018, 45, 126–130. [Google Scholar]
- Yin, L.; Chen, B.H.; Li, Y. Highly accurate image reconstruction for multimodal noise suppression using semisupervised learning on big data. IEEE Trans. Multimed. 2018, 20, 3045–3056. [Google Scholar] [CrossRef]
- Ian, Z.; Tong, Z.; Ma, Y.; Wang, M.; Ia, S.; Chen, X. Laser beam modulation with a fast focus tunable lens for speckle reduction in laser projection displays. Opt. Lasers Eng. 2020, 126. [Google Scholar]
- Norashikin, Y.; Nidal, S.; Aamir, S.M. Subspace-based technique for speckle noise reduction in SAR images. Ieee Trans. Geosci. Remote Sens. 2014, 52, 6257–6271. [Google Scholar]
- Ian, B.; Stuart, D.; Eremy, C. A Low Noise, Laser-Gated Imaging System for Long Range Target Identification. Proc. SPIE 2004, 5406, 133–144. [Google Scholar]
- Guo, H.; Sun, H.; Wang, S.; Fan, Y.; Li, Y. Study on super-resolution three-dimensional range-gated imaging technology. In Proceedings of the 9th International Conference on Graphic and Image Processing, Qingdao, China, 14–16 October 2017; Volume 10615. [Google Scholar]
- Hu, P. Weak Signal Detection Research on Gain Modulated Imaging Ladar; Harbin Institute of Technology: Harbin, China, 2013; pp. 14–24. [Google Scholar]
- Kaur, K.; Jindal, N.; Singh, K. Improved homomorphic filtering using fractional derivatives for enhancement of low contrast and non-uniformly illuminated images. Multimed. Tools Appl. 2019, 78, 27891–27914. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, C.; Xing, W. Color image enhancement based on local spatial homomorphic filtering and gradient domain variance guided image filtering. J. Electron. Imaging 2018, 27, 063026. [Google Scholar] [CrossRef]
- Tseng, C.; Lee, S. A Weak-Illumation Image Enhancement Method using Homomorphic Filter and Image Fusion. In Proceedings of the IEEE Global Conference on Consumer Electronics, Kyoto, Japan, 11–14 October 2016. [Google Scholar]
- Liu, Z.; Zou, J.W.; Zhang, J.; Yang, H. The Homomorphic Enhancement of Infrared Image in Fuzzy Field. Laser Infrared 2007, 37, 87–89. [Google Scholar]
- Fan, Y.; Zhao, H.; Sun, Y. Adaptive enhancement algorithm of laser image based on histogram fitting and brightness decision. Laser Infrared 2015, 8, 21. [Google Scholar]
- Kumar, M.; Diwakar, M. A new exponentially directional weighted function based CT image denoising using total variation. J. King Saud Univ. Comput. Inf. Sci. 2019, 31, 113–124. [Google Scholar]
- Kumar, A.; Ahmad, M.; Swamy, M. Tchebichef and Adaptive Steerable-Based Total Variation Model for Image Denoising. IEEE Trans. Image Process. 2019, 28, 2921–2935. [Google Scholar] [CrossRef] [PubMed]
- Bredies, K.; Vicente, D. A perfect reconstruction property for PDE-constrained total-variation minimization with application in Quantitative Susceptibility Mapping. Esaim-Control Optim. Calc. Var. 2019, 25, 83. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Imaging Conditions | Quadratic Term Coefficient | First-Order Coefficient | Constant |
|---|---|---|---|
| Condition 1 | 0.6996 | −216.4452 | 14,131.8952 |
| Condition 2 | −0.2139 | 51.1179 | −791.8378 |
| Imaging | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Optimal c | 0.2 | 0.21 | 0.19 | 0.18 | 0.16 | 0.15 | 0.14 | 0.14 | 0.13 | 0.13 |
| Mean | 66.07 | 77.13 | 88.09 | 99.15 | 110.11 | 121.09 | 131.93 | 142.85 | 153.64 | 164.70 |
| Variance | 12.45 | 19.53 | 16.60 | 18.69 | 20.75 | 22.28 | 28.69 | 25.05 | 26.37 | 27.67 |
| Contrast | 155.1 | 211.40 | 375.79 | 349.36 | 430.83 | 496.59 | 561.67 | 627.56 | 795.782 | 765.73 |
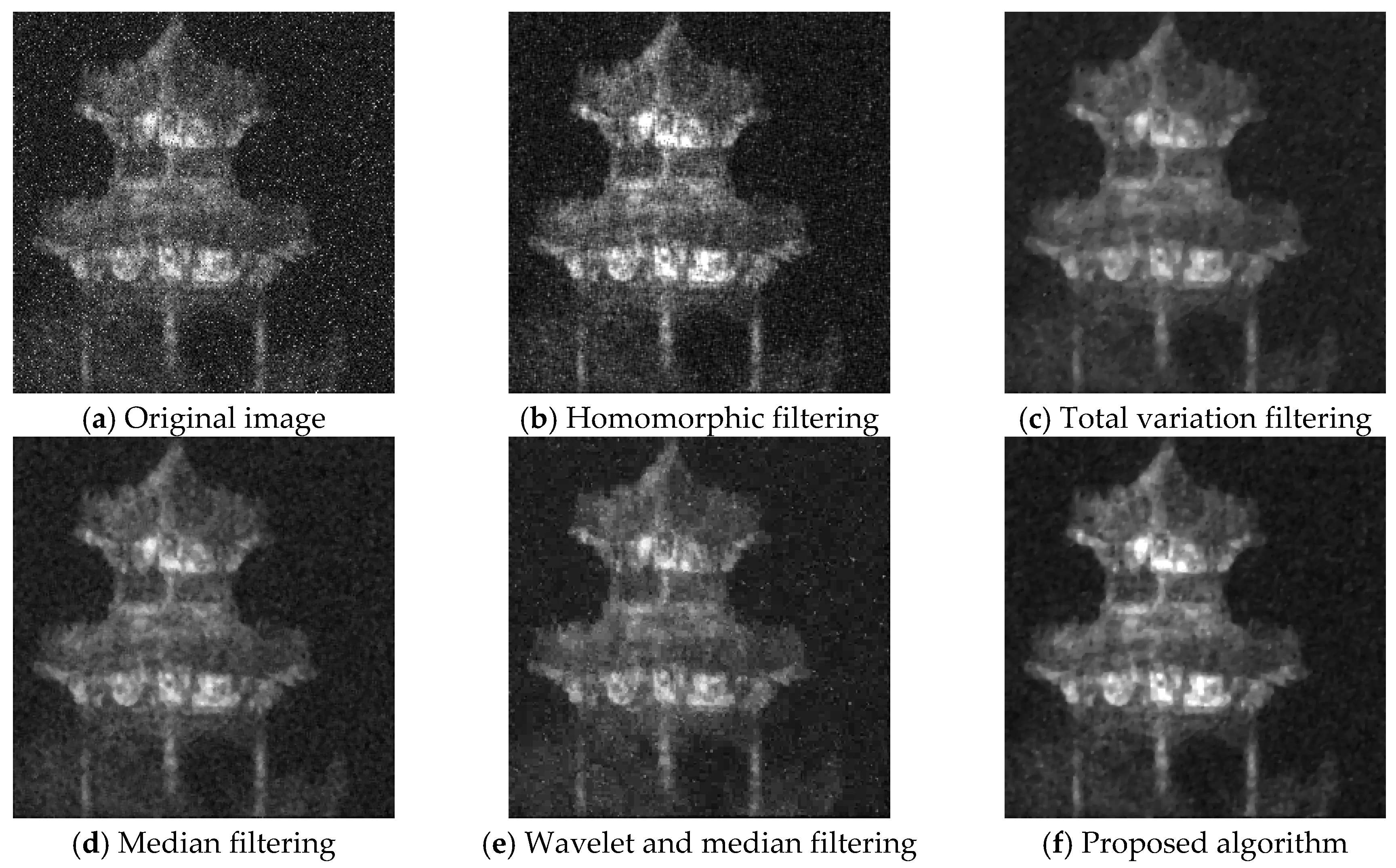
| Parameters. | Original Image | Homomorphic Filtering | Total Variation Filtering | Median Filtering | Wavelet and Median Filtering | Proposed Algorithm |
|---|---|---|---|---|---|---|
| Brightness | 38.8453 | 58.4783 | 35.2163 | 34.5822 | 35.1859 | 53.0877 |
| Signal to Noise Ratio | 12.6069 | 11.2899 | 23.2361 | 19.1329 | 17.6084 | 21.2822 |
| Average Gradient | 6.0313 | 20.5307 | 3.7252 | 6.1149 | 9.6674 | 19.2859 |
| Edge Strength | 58.1744 | 141.1252 | 37.4476 | 61.7853 | 85.3768 | 151.0584 |
| Time(s) | 0.2321 | 1.3564 | 0.1268 | 1.4238 | 1.4092 |
| Parameters | Original Image | Homomorphic Filtering | Total Variation Filtering | Median Filtering | Wavelet and Median Filtering | Proposed Algorithm |
|---|---|---|---|---|---|---|
| Brightness | 108.5561 | 123.1349 | 112.7245 | 112.9057 | 112.9012 | 129.1970 |
| Signal to Noise Ratio | 9.4461 | 11.2899 | 10.5266 | 12.4359 | 11.2216 | 14.6058 |
| Average Gradient | 4.0522 | 6.2278 | 3.7317 | 4.2416 | 5.4886 | 7.6992 |
| Edge Strength | 49.0059 | 58.1435 | 45.0113 | 40.9643 | 43.0269 | 63.0800 |
| Time(s) | 0.3528 | 1.4271 | 0.1021 | 1.6291 | 1.5015 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, Y.; Zhang, L.; Guo, H.; Hao, H.; Qian, K. Image Processing for Laser Imaging Using Adaptive Homomorphic Filtering and Total Variation. Photonics 2020, 7, 30. https://doi.org/10.3390/photonics7020030
Fan Y, Zhang L, Guo H, Hao H, Qian K. Image Processing for Laser Imaging Using Adaptive Homomorphic Filtering and Total Variation. Photonics. 2020; 7(2):30. https://doi.org/10.3390/photonics7020030
Chicago/Turabian StyleFan, Youchen, Laixian Zhang, Huichao Guo, Hongxing Hao, and Kechang Qian. 2020. "Image Processing for Laser Imaging Using Adaptive Homomorphic Filtering and Total Variation" Photonics 7, no. 2: 30. https://doi.org/10.3390/photonics7020030
APA StyleFan, Y., Zhang, L., Guo, H., Hao, H., & Qian, K. (2020). Image Processing for Laser Imaging Using Adaptive Homomorphic Filtering and Total Variation. Photonics, 7(2), 30. https://doi.org/10.3390/photonics7020030