Range Intensity Profiles of Multi-Slice Integration for Pulsed Laser Range-Gated Imaging System

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
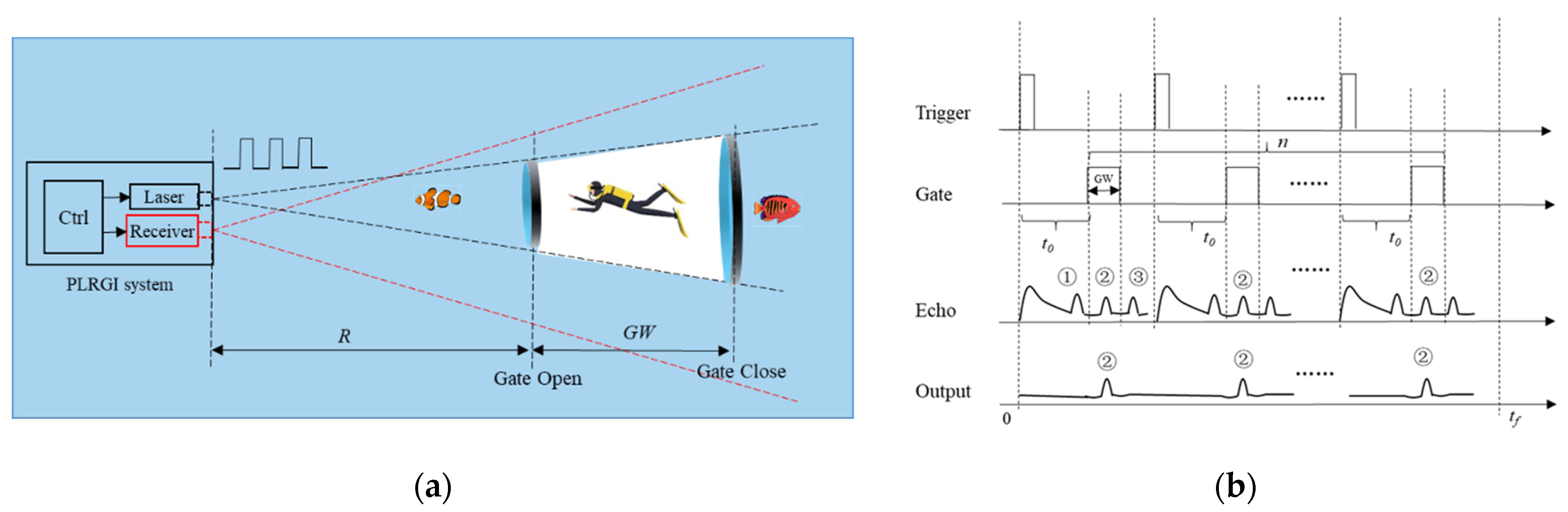
2.1. Principle of PLRGI
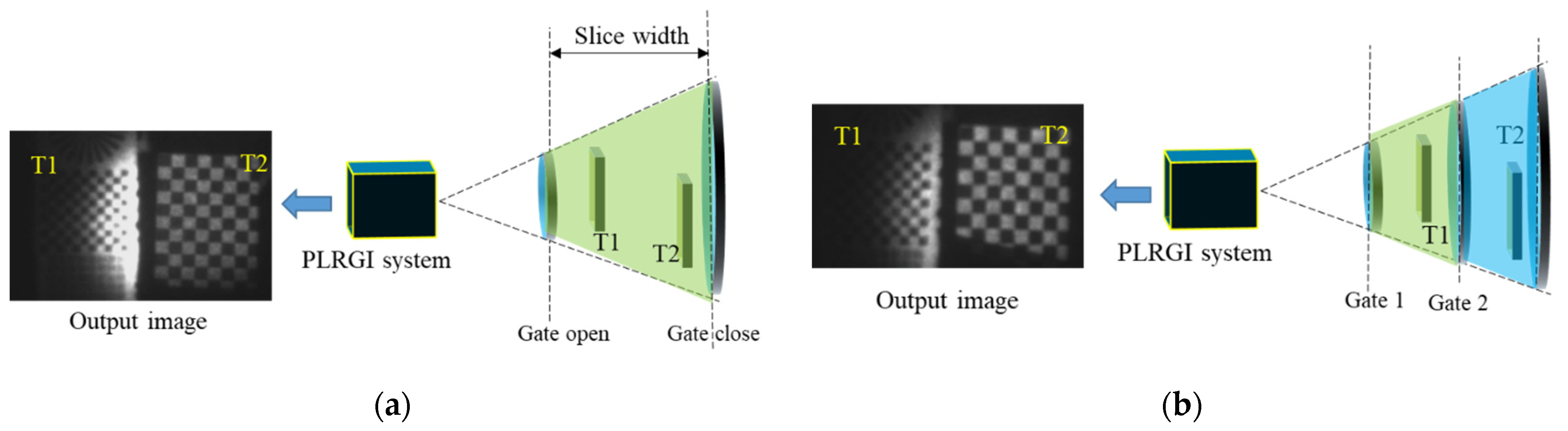
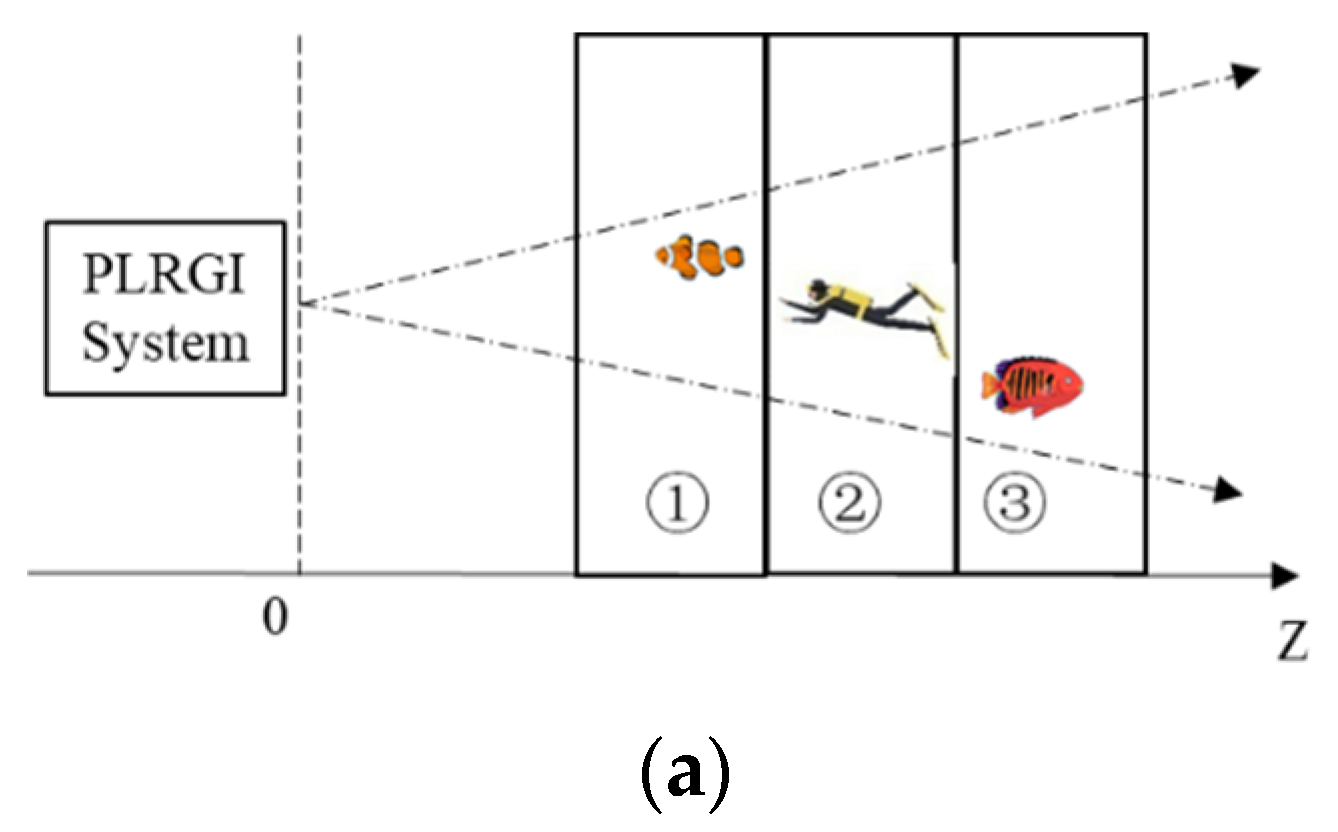
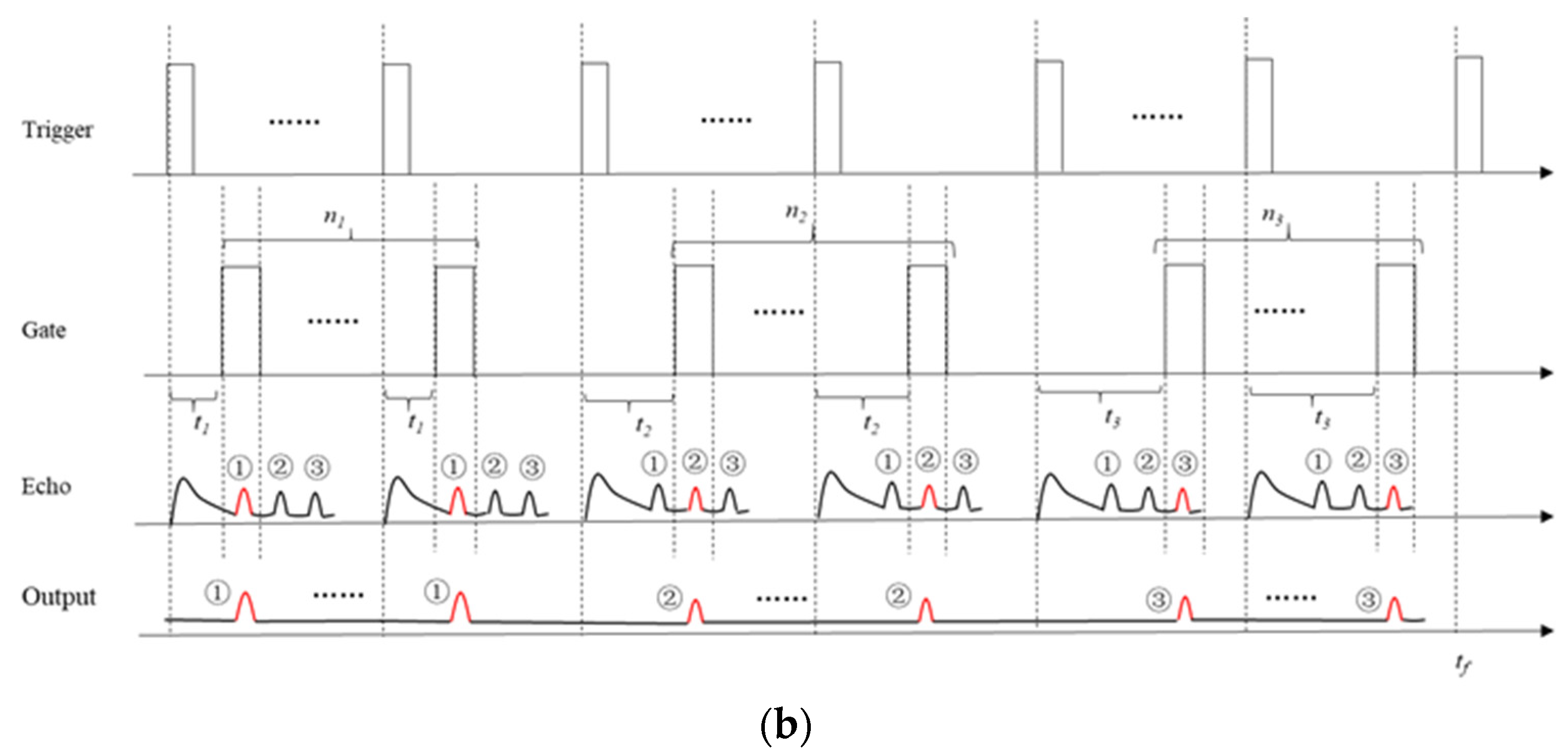
2.2. Multi-Slice Integration Method
2.3. Method to Determine Parameters in MSI Method
3. Results and Discussion
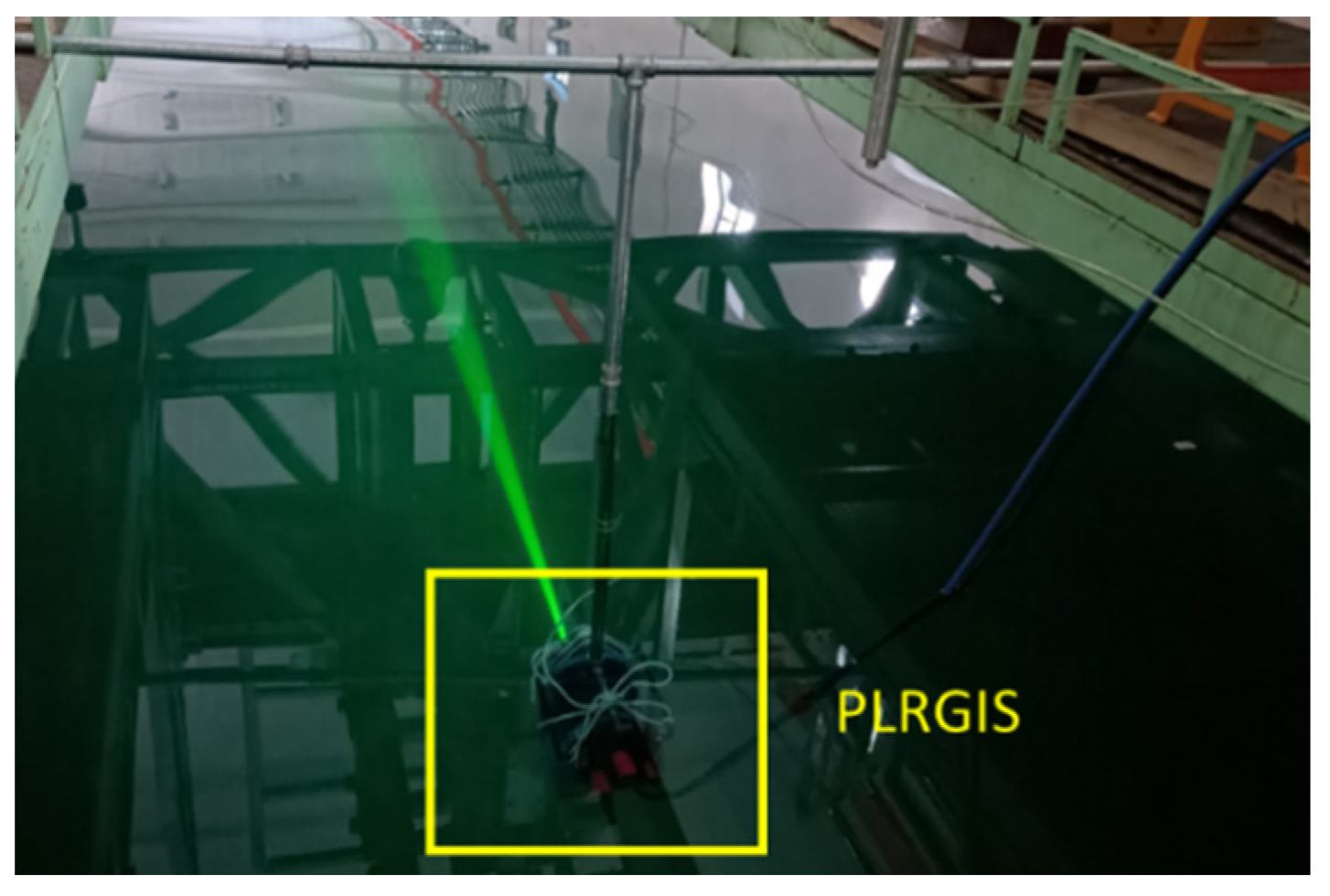
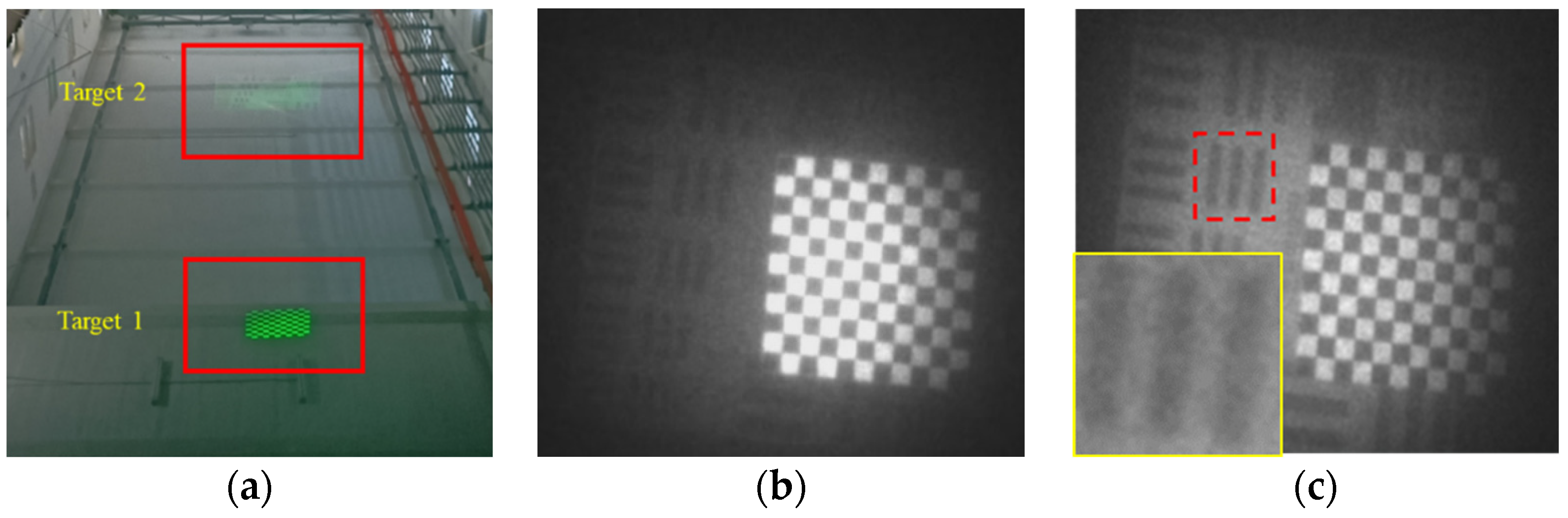
3.1. Experiment Setup
3.2. Comparison of Single Slice and Multi-Slice
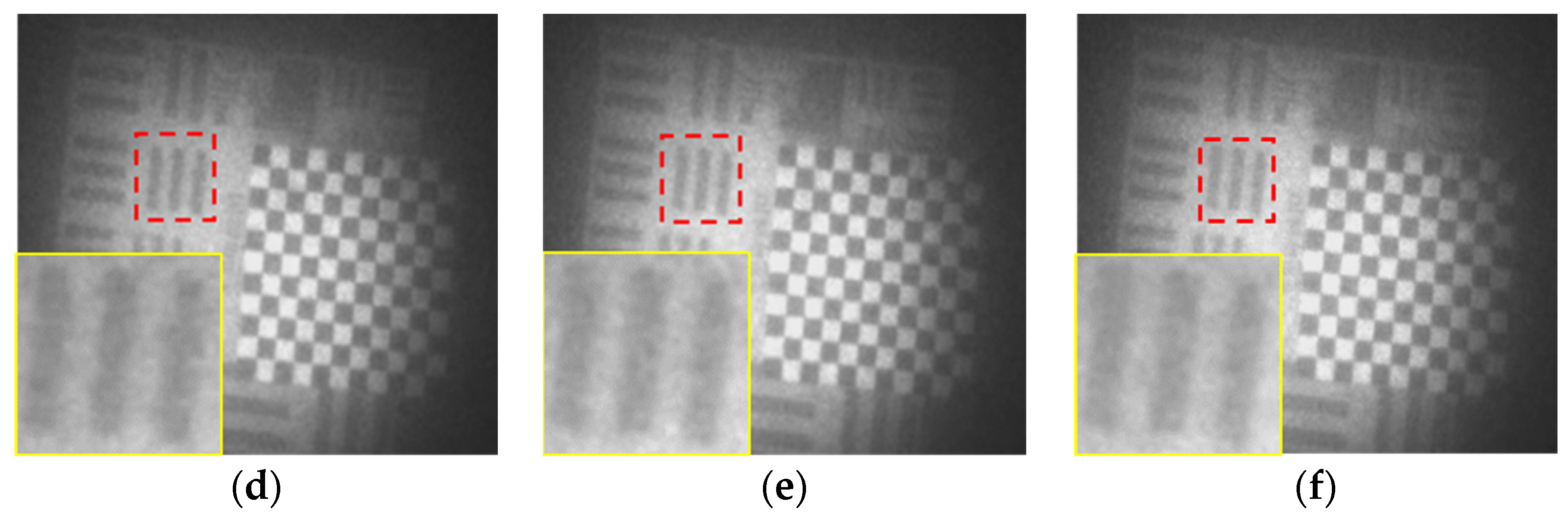
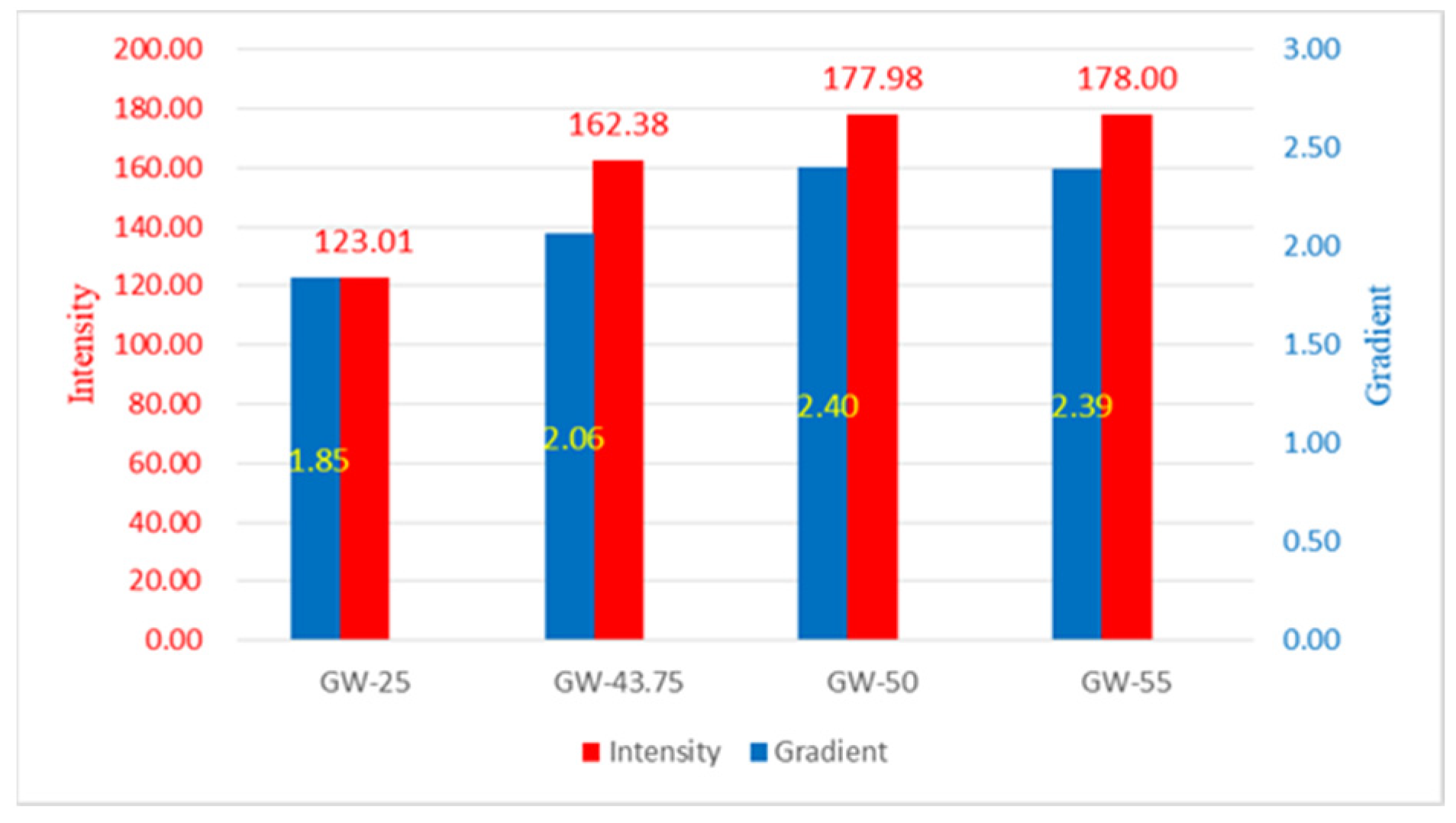
3.3. Performance of MSI Method
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Weidemann, A.; Fournier, G.R.; Forand, L.; Mathieu, P. In Harbor Underwater Threat Detection/Identification Using Active Imaging. In Proceedings of the Photonics for Port and Harbor Security, Orlando, FL, USA, 19 May 2005; SPIE: Orlando, FL, USA, 2005; Volume 5780, pp. 59–70. [Google Scholar]
- Ulich, B.L.; Lacovara, P.; Moran, S.E.; DeWeert, M.J. Recent Results in Imaging Lidar. In Proceedings of the Advances in Laser Remote Sensing for Terrestrial and Oceanographic Applications, Orlando, FL, USA, 2 July 1997; SPIE: Orlando, FL, USA, 2005; Volume 3059, pp. 95–108. [Google Scholar]
- Matsumoto, N. Development of Underwater Search and Rescue Remotely Operated Vehicles. Adv. Robot. 2002, 16, 561–564. [Google Scholar] [CrossRef]
- A.Mol’kov, A.; S.Dolin, L. The Possibility of Determining Optical Properties of Water from the Image of the Underwater Solar Path. Radiophys. Quantum 2016, 58, 586–597. [Google Scholar] [CrossRef]
- Mariani, P.; Quincoces, I.; Haugholt, K.H.; Chardard, Y.; Visser, A.W.; Yates, C.; Piccinno, G.; Reali, G.; Risholm, P.; Thielemann, J.T. Range-Gated Imaging System for Underwater Monitoring in Ocean Environment. Sustainability 2018, 11, 162. [Google Scholar] [CrossRef] [Green Version]
- Yang, K.; Yu, L.; Xia, M.; Xu, T.; Li, W. Nonlinear RANSAC with Crossline Correction: An Algorithm for Vision-Based Curved Cable Detection System. Opt. Lasers Eng. 2021, 141, 106417. [Google Scholar] [CrossRef]
- Shen, Y.; Zhao, C.; Liu, Y.; Wang, S.; Huang, F. Underwater Optical Imaging: Key Technologies and Applications Review. IEEE Access 2021, 9, 85500–85514. [Google Scholar] [CrossRef]
- Dalgleish, F.R.; Vuorenkoski, A.K.; Ouyang, B. Extended-Range Undersea Laser Imaging: Current Research Status and a Glimpse at Future Technologies. Mar. Technol. Soc. J. 2013, 47, 128–147. [Google Scholar] [CrossRef]
- Heckman, P.; Hodgson, R. Underwater Optical Range Gating. IEEE J. Quantum Electron. 1967, 3, 445–448. [Google Scholar] [CrossRef]
- Tan, C.S.; Sluzek, A.; Seet, G.L.G.; Jiang, T.Y. Range Gated Imaging System for Underwater Robotic Vehicle. In Proceedings of the OCEANS 2006—Asia Pacific, Singapore, Singapore, 16–19 May 2006; IEEE: Manhattan, NY, USA, 2006; pp. 1–6. [Google Scholar]
- Jin, W.; Cao, F.; Wang, X.; Liu, G.; Huang, Y.; Qi, H.; Shen, F. Range-Gated Underwater Laser Imaging System Based on Intensified Gate Imaging Technology. In Proceedings of the International Symposium on Photoelectronic Detection and Imaging 2007: Photoelectronic Imaging and Detection, Beijing, China, 25 February 2008; Zhou, L., Ed.; SPIE: Bellingham, WA, USA, 2008; p. 66210L. [Google Scholar]
- Jaffe, J.S. Underwater Optical Imaging: The Past, the Present, and the Prospects. IEEE J. Ocean. Eng. 2015, 40, 683–700. [Google Scholar] [CrossRef]
- De Dominicis, L. Underwater 3D Vision, Ranging and Range Gating. In Subsea Optics and Imaging; Watson, J., Zielinski, O., Eds.; Woodhead Publishing Series in Electronic and Optical Materials; Woodhead Publishing: Sawston, UK, 2013; pp. 379–410e. ISBN 978-0-85709-341-7. [Google Scholar]
- McLean, E.A.; Burris, H.R.; Strand, M.P. Short-Pulse Range-Gated Optical Imaging in Turbid Water. Appl. Opt. AO 1995, 34, 4343–4351. [Google Scholar] [CrossRef]
- Acharekar, M.A. Underwater Laser Imaging System (ULIS). In Proceedings of the Detection and Remediation Technologies for Mines and Minelike Targets II, Orlando, FL, USA, 22 July 1997; Dubey, A.C., Barnard, R.L., Eds.; SPIE: Bellingham, WA, USA, 1997; pp. 750–761. [Google Scholar]
- Xinwei, W.; Youfu, L.; Yan, Z. Multi-Pulse Time Delay Integration Method for Flexible 3D Super-Resolution Range-Gated Imaging. Opt. Express OE 2015, 23, 7820–7831. [Google Scholar] [CrossRef] [PubMed]
- Busck, J. Underwater 3-D Optical Imaging with a Gated Viewing Laser Radar. Opt. Eng 2005, 44, 116001. [Google Scholar] [CrossRef]
- Peng, B.; Jin, D.; Ji, C.; Pei, C.; Sun, L. An Underwater Laser Three-Dimensional Imaging System. In Proceedings of the Sixth Symposium on Novel Optoelectronic Detection Technology and Applications, 17 April 2020; SPIE: Bellingham, WA, USA, 2020; Volume 11455, pp. 437–442. [Google Scholar]
- Lin, H.; Zhang, X.; Ma, L.; Hu, Q.; Jin, D. Estimation of Water Attenuation Coefficient Byimaging Modeling of the Backscattered Lightwith the Pulsed Laser Range-Gated Imagingsystem. Opt. Contin. 2022, 1, 989–1002. [Google Scholar] [CrossRef]
- Jaffe, J.S. Computer Modeling and the Design of Optimal Underwater Imaging Systems. IEEE J. Ocean. Eng. 1990, 15, 101–111. [Google Scholar] [CrossRef]
- Forand, J.L.; Fournier, G.R.; Bonnier, D.; Pace, P. LUCIE: A Laser Underwater Camera Image Enhancer. In Proceedings of the OCEANS ’93, Victoria, BC, Canada, 18–21 October 1993; IEEE: Victoria, BC, Canada, 1993; pp. III/187–III/190. [Google Scholar]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, H.; Han, H.; Ma, L.; Ding, Z.; Jin, D.; Zhang, X. Range Intensity Profiles of Multi-Slice Integration for Pulsed Laser Range-Gated Imaging System. Photonics 2022, 9, 505. https://doi.org/10.3390/photonics9070505
Lin H, Han H, Ma L, Ding Z, Jin D, Zhang X. Range Intensity Profiles of Multi-Slice Integration for Pulsed Laser Range-Gated Imaging System. Photonics. 2022; 9(7):505. https://doi.org/10.3390/photonics9070505
Chicago/Turabian StyleLin, Hongsheng, Hongwei Han, Liheng Ma, Zhichao Ding, Dongdong Jin, and Xiaohui Zhang. 2022. "Range Intensity Profiles of Multi-Slice Integration for Pulsed Laser Range-Gated Imaging System" Photonics 9, no. 7: 505. https://doi.org/10.3390/photonics9070505
APA StyleLin, H., Han, H., Ma, L., Ding, Z., Jin, D., & Zhang, X. (2022). Range Intensity Profiles of Multi-Slice Integration for Pulsed Laser Range-Gated Imaging System. Photonics, 9(7), 505. https://doi.org/10.3390/photonics9070505