
Investigation of Forces and Moments during Orthodontic Tooth Intrusion Using Robot Orthodontic Measurement and Simulation System (ROSS)

 , ,
, ,  and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Robot Orthodontic Measurement and Simulation System
2.2. Experimental Setup and Measurement Simulation
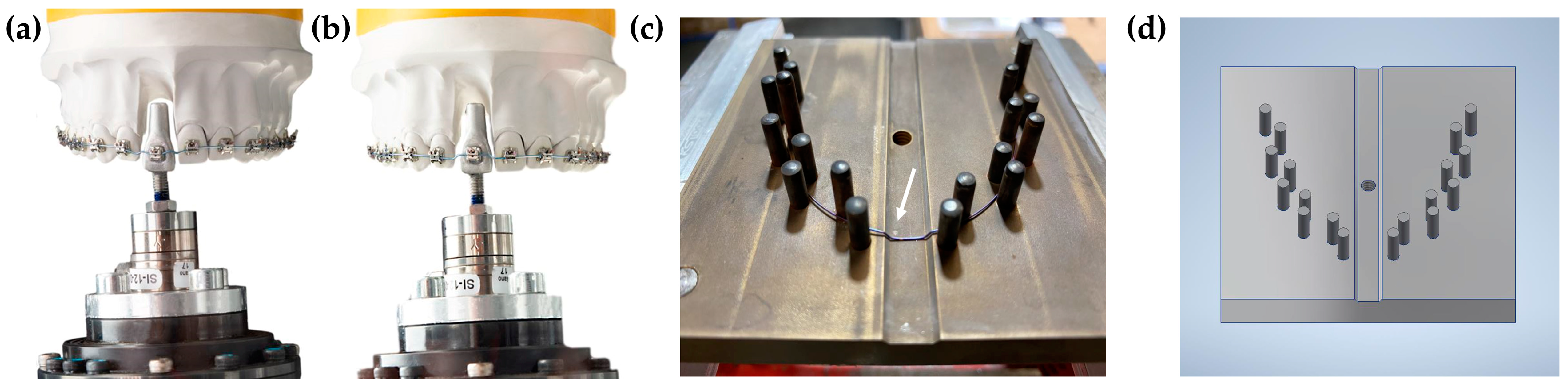
- Position the test tooth adapted to the force–torque sensor in the ideal position according to the KAVO typodont model using a silicone impression. The deflection of the test tooth in the extruded, pathologic starting position is obtained (extrusion distance: 1.6 mm), and the test archwire is inserted (Figure 1a).
- The automatic and gradual transfer of the test tooth using force control (pre-defined in LabView) toward its final position is achieved, which is defined as forces and moments approaching zero (Figure 1b). As the measured intrusion distance did not reach 1.6 mm for each investigated wire, a reference distance was defined as 0.8 mm for statistical evaluation to ensure the data points for each wire and the comparability of data. The LabView software (LabView 2012 Version 12.03f3) by the manufacturer National Instruments (NI, Austin, TX, USA) was used for closed-loop force control using virtual instruments (VI) and processes based on mathematical algorithms. The force–torque sensor measured forces and moments, continuously adding up to thousands of data points for each sample. Afterward, the test wire was removed, and the sensor was reset for the next test series.
2.3. Statistics
3. Results
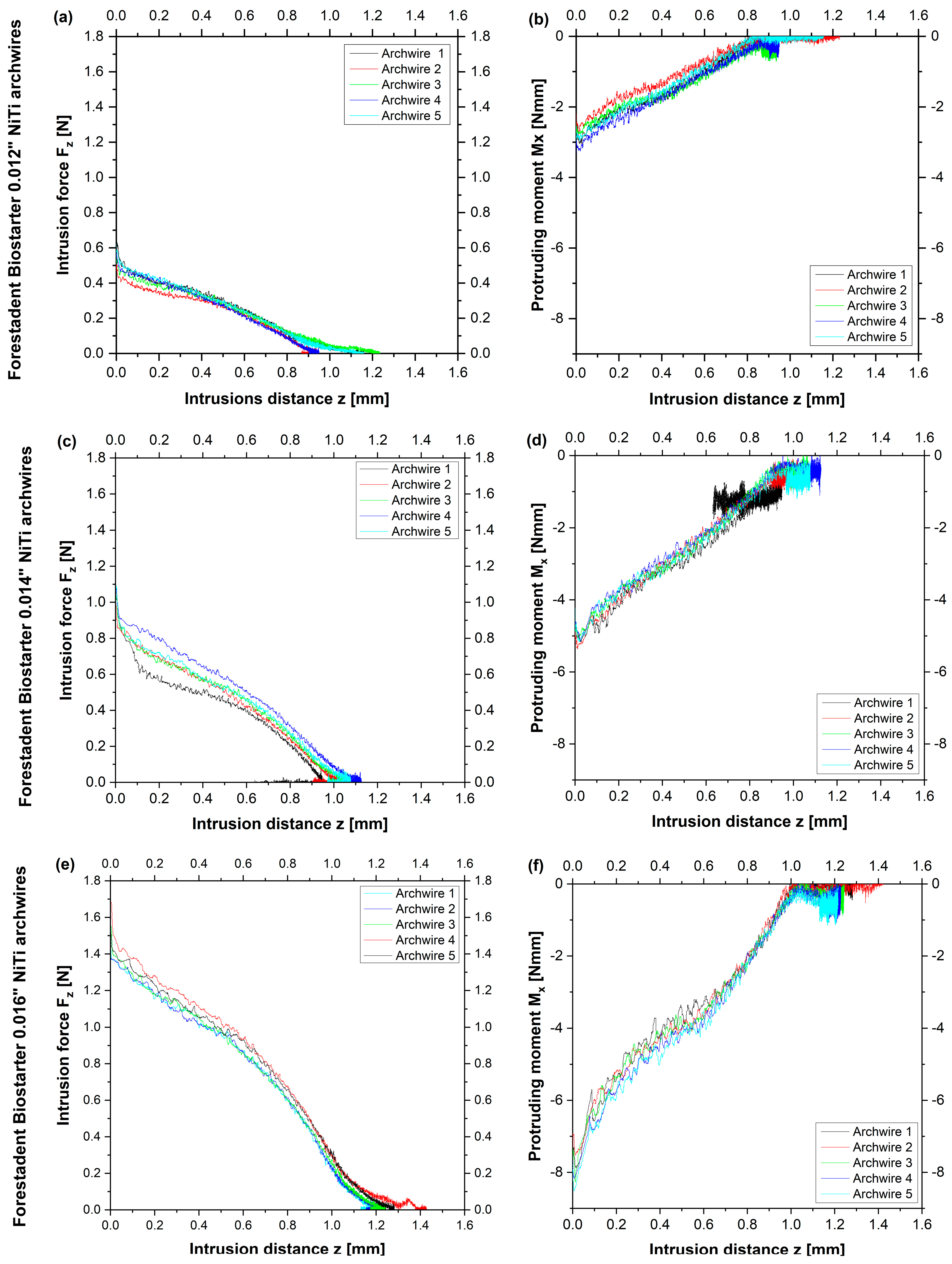
3.1. Comparison of Different Wire Dimensions of NiTi Archwires by the Same Manufacturer without Intrusion Steps
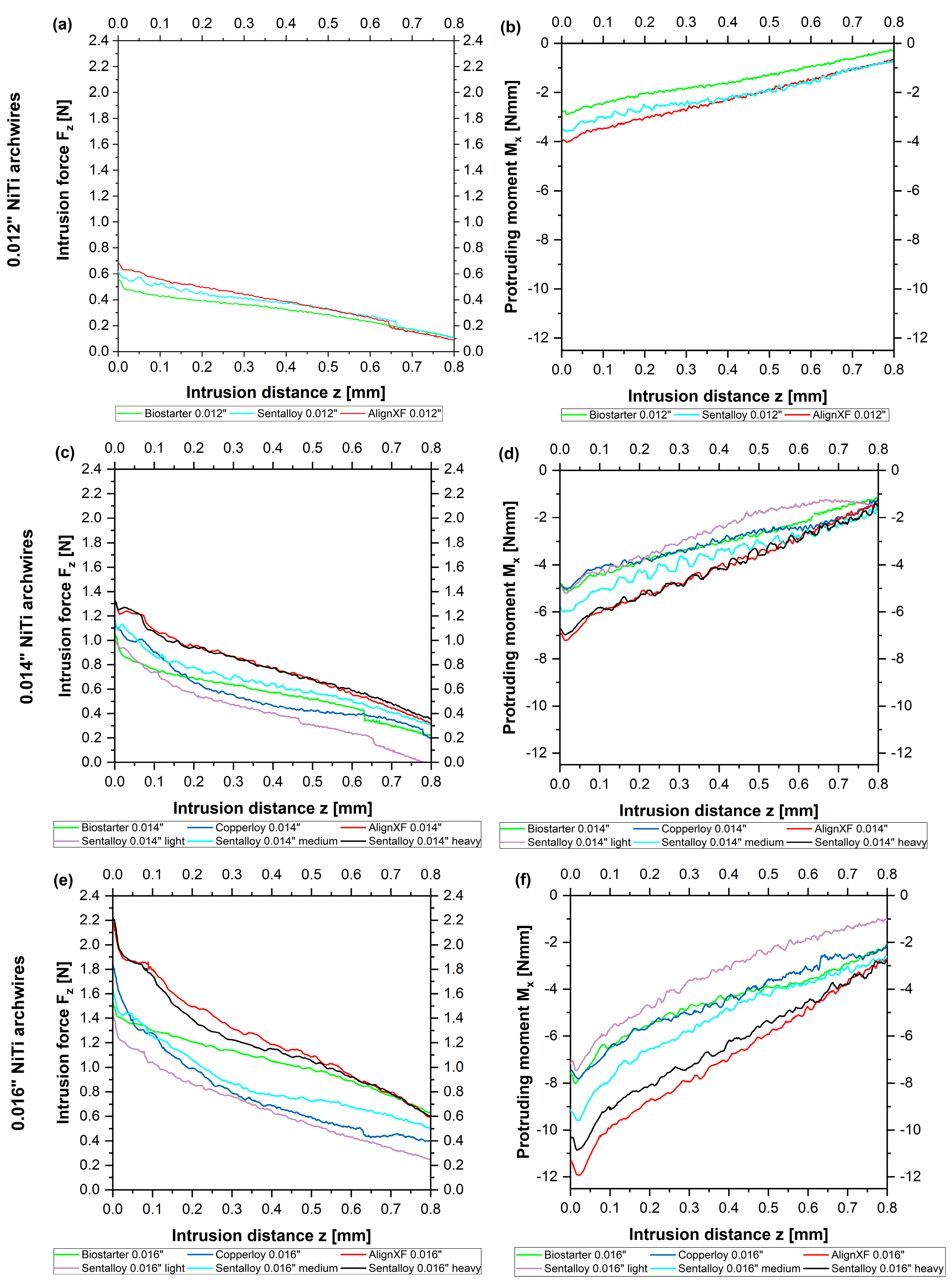
3.2. Comparison of Tooth Intrusion Results with 0.012″, 0.014″ and 0.016″ NiTi Archwires without Intrusion Steps
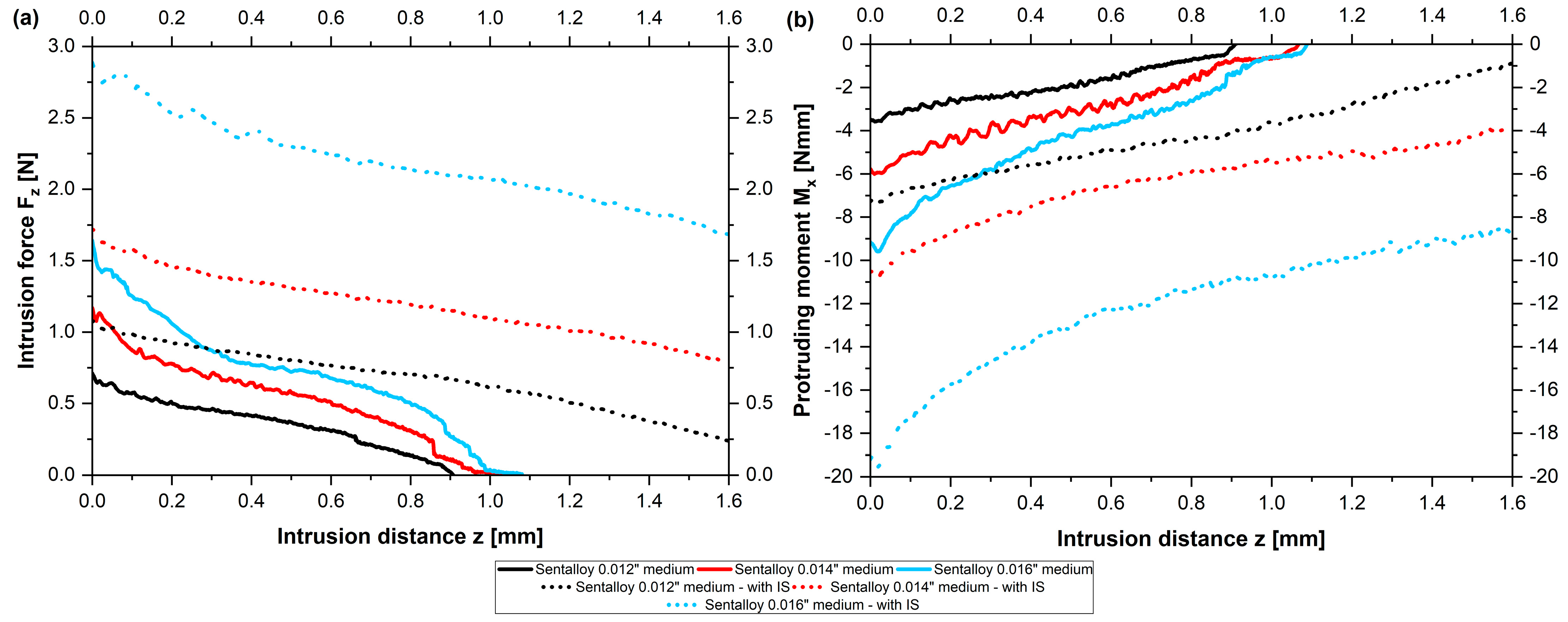
3.3. Comparison of Forces and Moments of Straight NiTi Archwires Compared to Archwires with Intrusion Steps
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wichelhaus, A. Kieferorthopädie—Therapie Band 1. In Farbatlanten der Zahnmedizin; Georg Thieme Verlag KG: Stuttgart, Germany, 2013; Volume 2. [Google Scholar]
- Yassir, Y.A.; McIntyre, G.T.; Bearn, D.R. Orthodontic treatment and root resorption: An overview of systematic reviews. Eur. J. Orthod. 2021, 43, 442–456. [Google Scholar] [CrossRef]
- Harry, M.R.; Sims, M.R. Root resorption in bicuspid intrusion. A scanning electron microscope study. Angle Orthod. 1982, 52, 235–258. [Google Scholar] [CrossRef]
- Kurol, J.; Owman-Moll, P. Hyalinization and root resorption during early orthodontic tooth movement in adolescents. Angle Orthod. 1998, 68, 161–165. [Google Scholar] [CrossRef] [PubMed]
- Linge, L.; Linge, B.O. Patient characteristics and treatment variables associated with apical root resorption during orthodontic treatment. Am. J. Orthod. Dentofac. Orthop. 1991, 99, 35–43. [Google Scholar] [CrossRef] [PubMed]
- Remington, D.N.; Joondeph, D.R.; Artun, J.; Riedel, R.A.; Chapko, M.K. Long-term evaluation of root resorption occurring during orthodontic treatment. Am. J. Orthod. Dentofac. Orthop. 1989, 96, 43–46. [Google Scholar] [CrossRef] [PubMed]
- Weltman, B.; Vig, K.W.; Fields, H.W.; Shanker, S.; Kaizar, E.E. Root resorption associated with orthodontic tooth movement: A systematic review. Am. J. Orthod. Dentofac. Orthop. 2010, 137, 462–476; discussion 412A. [Google Scholar] [CrossRef] [PubMed]
- Hartsfield, J.K., Jr. Pathways in external apical root resorption associated with orthodontia. Orthod. Craniofac. Res. 2009, 12, 236–242. [Google Scholar] [CrossRef]
- Burstone, C.J.; Koenig, H.A. Optimizing anterior and canine retraction. Am. J. Orthod. 1976, 70, 1–19. [Google Scholar] [CrossRef] [PubMed]
- Rakosi, T.; Jonas, I. Kieferorthopädie: Diagnostik; Georg Thieme Verlag: Stuttgart, Germany, 1989. [Google Scholar]
- Reid, S.A.; Boyde, A. Changes in the mineral density distribution in human bone with age: Image analysis using backscattered electrons in the SEM. J. Bone Miner. Res. 1987, 2, 13–22. [Google Scholar] [CrossRef] [PubMed]
- Stockli, P.W. [Orthodontics—A biological problem]. Inf. Orthod. Kieferorthop. 1973, 5, 188–208. [Google Scholar]
- Apajalahti, S.; Peltola, J.S. Apical root resorption after orthodontic treatment—A retrospective study. Eur. J. Orthod. 2007, 29, 408–412. [Google Scholar] [CrossRef] [PubMed]
- Lupi, J.E.; Handelman, C.S.; Sadowsky, C. Prevalence and severity of apical root resorption and alveolar bone loss in orthodontically treated adults. Am. J. Orthod. Dentofac. Orthop. 1996, 109, 28–37. [Google Scholar] [CrossRef] [PubMed]
- Parker, R.J.; Harris, E.F. Directions of orthodontic tooth movements associated with external apical root resorption of the maxillary central incisor. Am. J. Orthod. Dentofac. Orthop. 1998, 114, 677–683. [Google Scholar] [CrossRef] [PubMed]
- Sameshima, G.T.; Sinclair, P.M. Predicting and preventing root resorption: Part I. Diagnostic factors. Am. J. Orthod. Dentofac. Orthop. 2001, 119, 505–510. [Google Scholar] [CrossRef]
- Harzer, W. Kieferorthopädie. In Checklisten der Zahnmedizin; Georg Thieme Verlag: Stuttgart, Germany, 2011. [Google Scholar]
- Reitan, K. Some factors determining the evaluation of forces in orthodontics. Am. J. Orthod. 1957, 43, 32–45. [Google Scholar] [CrossRef]
- Gonzales, C.; Hotokezaka, H.; Yoshimatsu, M.; Yozgatian, J.H.; Darendeliler, M.A.; Yoshida, N. Force magnitude and duration effects on amount of tooth movement and root resorption in the rat molar. Angle Orthod. 2008, 78, 502–509. [Google Scholar] [CrossRef]
- Von Bohl, M.; Maltha, J.; Von den Hoff, H.; Kuijpers-Jagtman, A.M. Changes in the periodontal ligament after experimental tooth movement using high and low continuous forces in beagle dogs. Angle Orthod. 2004, 74, 16–25. [Google Scholar] [CrossRef]
- Von Bohl, M.; Maltha, J.C.; Von Den Hoff, J.W.; Kuijpers-Jagtman, A.M. Focal hyalinization during experimental tooth movement in beagle dogs. Am. J. Orthod. Dentofac. Orthop. 2004, 125, 615–623. [Google Scholar] [CrossRef]
- Faltin, R.M.; Arana-Chavez, V.E.; Faltin, K.; Sander, F.G.; Wichelhaus, A. Root resorptions in upper first premolars after application of continuous intrusive forces. Intra-individual study. J. Orofac. Orthop. 1998, 59, 208–219. [Google Scholar] [CrossRef]
- Reitan, K. Tissue behavior during orthodontic tooth movement. Am. J. Orthod. 1960, 46, 881–900. [Google Scholar] [CrossRef]
- Dotzer, B.; Stocker, T.; Wichelhaus, A.; Janjic Rankovic, M.; Sabbagh, H. Biomechanical simulation of forces and moments of initial orthodontic tooth movement in dependence on the used archwire system by ROSS (Robot Orthodontic Measurement & Simulation System). J. Mech. Behav. Biomed. Mater. 2023, 144, 105960. [Google Scholar] [CrossRef]
- Al-Zubair, N. Orthodontic intrusion: A contemporary review. J. Orthod. Res. 2014, 2, 118–124. [Google Scholar] [CrossRef]
- Brauchli, L.M.; Keller, H.; Senn, C.; Wichelhaus, A. Influence of bending mode on the mechanical properties of nickel-titanium archwires and correlation to differential scanning calorimetry measurements. Am. J. Orthod. Dentofac. Orthop. 2011, 139, e449–e454. [Google Scholar] [CrossRef] [PubMed]
- Wichelhaus, A.; Mehnert, A.; Stocker, T.; Baumert, U.; Mertmann, M.; Sabbagh, H.; Seidel, C.L. Thermal Programming of Commercially Available Orthodontic NiTi Archwires. Materials 2023, 16, 3683. [Google Scholar] [CrossRef] [PubMed]
- Kusy, R.P.; Dilley, G.J. Elastic modulus of a triple-stranded stainless steel arch wire via three- and four-point bending. J. Dent. Res. 1984, 63, 1232–1240. [Google Scholar] [CrossRef]
- Tonner, R.I.; Waters, N.E. The characteristics of super-elastic Ni-Ti wires in three-point bending. Part I: The effect of temperature. Eur. J. Orthod. 1994, 16, 409–419. [Google Scholar] [CrossRef] [PubMed]
- Tonner, R.I.; Waters, N.E. The characteristics of super-elastic Ni-Ti wires in three-point bending. Part II: Intra-batch variation. Eur. J. Orthod. 1994, 16, 421–425. [Google Scholar] [CrossRef]
- Sander, F.G.; Schwenzer, N.; Ehrenfeld, M. Zahn-Mund-Kiefer-Heilkunde Kieferorthopädie; Georg Thieme Verlag KG: Stuttgart, Germany, 2011. [Google Scholar]
- Bourauel, C.; Drescher, D.; Thier, M. An experimental apparatus for the simulation of three-dimensional movements in orthodontics. J. Biomed. Eng. 1992, 14, 371–378. [Google Scholar] [CrossRef]
- Pandis, N.; Eliades, T.; Bourauel, C. Comparative assessment of forces generated during simulated alignment with self-ligating and conventional brackets. Eur. J. Orthod. 2009, 31, 590–595. [Google Scholar] [CrossRef]
- Fansa, M.; Keilig, L.; Reimann, S.; Jager, A.; Bourauel, C. The leveling effectiveness of self-ligating and conventional brackets for complex tooth malalignments. J. Orofac. Orthop. 2009, 70, 285–296. [Google Scholar] [CrossRef]
- Friedrich, D.; Rosarius, N.; Rau, G.; Diedrich, P. Measuring system for in vivo recording of force systems in orthodontic treatment-concept and analysis of accuracy. J. Biomech. 1999, 32, 81–85. [Google Scholar] [CrossRef] [PubMed]
- Wichelhaus, A.; Sander, C.; Sander, F.G. Development and biomechanical investigation of a new compound palatal arch. J. Orofac. Orthop. 2004, 65, 104–122. [Google Scholar] [CrossRef] [PubMed]
- Fuck, L.M.; Drescher, D. Force systems in the initial phase of orthodontic treatment—A comparison of different leveling arch wires. J. Orofac. Orthop. 2006, 67, 6–18. [Google Scholar] [CrossRef] [PubMed]
- Badawi, H.M.; Toogood, R.W.; Carey, J.P.; Heo, G.; Major, P.W. Three-dimensional orthodontic force measurements. Am. J. Orthod. Dentofac. Orthop. 2009, 136, 518–528. [Google Scholar] [CrossRef]
- Chen, J.; Bulucea, I.; Katona, T.R.; Ofner, S. Complete orthodontic load systems on teeth in a continuous full archwire: The role of triangular loop position. Am. J. Orthod. Dentofac. Orthop. 2007, 132, 143.e1–143.e8. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Isikbay, S.C.; Brizendine, E.J. Quantification of three-dimensional orthodontic force systems of T-loop archwires. Angle Orthod. 2010, 80, 566–570. [Google Scholar] [CrossRef] [PubMed]
- Perrey, W.; Konermann, A.; Keilig, L.; Reimann, S.; Jager, A.; Bourauel, C. Effect of archwire qualities and bracket designs on the force systems during leveling of malaligned teeth. J. Orofac. Orthop. 2015, 76, 129–142. [Google Scholar] [CrossRef]
- Drescher, D.; Bourauel, C.; Thier, M. Application of the orthodontic measurement and simulation system (OMSS) in orthodontics. Eur. J. Orthod. 1991, 13, 169–178. [Google Scholar] [CrossRef]
- Ahuja, S.; Gupta, S.; Bhambri, E.; Ahuja, V.; Jaura, B.S. Comparison of conventional methods of simultaneous intrusion and retraction of maxillary anterior: A finite element analysis. J. Orthod. 2018, 45, 243–249. [Google Scholar] [CrossRef]
- de Brito, G.M.; Brito, H.H.A.; Marra, G.G.M.; Freitas, L.R.P.; Hargreaves, B.O.; Magalhaes, P.A.A., Jr.; Oliveira, D.D. Pure Mandibular Incisor Intrusion: A Finite Element Study to Evaluate the Segmented Arch Technique. Materials 2019, 12, 2784. [Google Scholar] [CrossRef]
- Hayashi, K.; Uechi, J.; Lee, S.P.; Mizoguchi, I. Three-dimensional analysis of orthodontic tooth movement based on XYZ and finite helical axis systems. Eur. J. Orthod. 2007, 29, 589–595. [Google Scholar] [CrossRef] [PubMed]
- Haas, E.; Schmid, A.; Stocker, T.; Wichelhaus, A.; Sabbagh, H. Force-Controlled Biomechanical Simulation of Orthodontic Tooth Movement with Torque Archwires Using HOSEA (Hexapod for Orthodontic Simulation, Evaluation and Analysis). Bioengineering 2023, 10, 1055. [Google Scholar] [CrossRef] [PubMed]
- Alsabti, N.; Bourauel, C.; Talic, N. Comparison of force loss during sliding of low friction and conventional TMA orthodontic archwires: An in vitro study. J. Orofac. Orthop. 2021, 82, 218–225. [Google Scholar] [CrossRef] [PubMed]
- Hohmann, A.; Wolfram, U.; Geiger, M.; Boryor, A.; Sander, C.; Faltin, R.; Faltin, K.; Sander, F.G. Periodontal ligament hydrostatic pressure with areas of root resorption after application of a continuous torque moment. Angle Orthod. 2007, 77, 653–659. [Google Scholar] [CrossRef]
- Flores-Mir, C. Attaining a working archwire—Which sequence? Evid. Based Dent. 2007, 8, 48. [Google Scholar] [CrossRef]
- Drescher, D.; Bourauel, C.; Schumacher, H.A. Der Kraftverlust durch Friktion bei der bogengeführten Zahnbewegung. Fortschr. Kieferorthop. 1990, 51, 99–105. [Google Scholar] [CrossRef]
- Drescher, D.; Laaser, W.; Schumacher, H.A. Materialtechnische Untersuchungen zum Problem der Friktion zwischen Bracket und Bogen. Fortschr. Kieferorthop. 1989, 50, 256–267. [Google Scholar] [CrossRef]
- Nam, T.H.; Saburi, T.; Shimizu, K.I. Cu-Content Dependence of Shape Memory Characteristics in Ti–Ni–Cu Alloys. Mater. Trans. JIM 1990, 31, 959–967. [Google Scholar] [CrossRef]
- Kuruthukulam, R.M.; Patil, A.S. The center of resistance of a tooth: A review of the literature. Biophys. Rev. 2023, 15, 35–41. [Google Scholar] [CrossRef]
- Christiansen, R.L.; Burstone, C.J. Centers of rotation within the periodontal space. Am. J. Orthod. 1969, 55, 353–369. [Google Scholar] [CrossRef]
- Nägerl, H.; Burstone, C.J.; Becker, B.; Kubein-Messenburg, D. Centers of rotation with transverse forces: An experimental study. Am. J. Orthod. Dentofac. Orthop. 1991, 99, 337–345. [Google Scholar] [CrossRef]
- Choy, C.J.B.K. The Biomechanical Foundation of Clinical Orthodontics, 1st ed.; Quintessence Publishing Company, Inc.: Batavia, NY, USA, 2015. [Google Scholar]
- Harris, E.F.; Butler, M.L. Patterns of incisor root resorption before and after orthodontic correction in cases with anterior open bites. Am. J. Orthod. Dentofac. Orthop. 1992, 101, 112–119. [Google Scholar] [CrossRef] [PubMed]
- Brudvik, P.; Rygh, P. Multi-nucleated cells remove the main hyalinized tissue and start resorption of adjacent root surfaces. Eur. J. Orthod. 1994, 16, 265–273. [Google Scholar] [CrossRef] [PubMed]
- Brudvik, P.; Rygh, P. Root resorption beneath the main hyalinized zone. Eur. J. Orthod. 1994, 16, 249–263. [Google Scholar] [CrossRef] [PubMed]
- Rygh, P. Ultrastructural cellular reactions in pressure zones of rat molar periodontium incident to orthodontic tooth movement. Acta Odontol. Scand. 1972, 30, 575–593. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacturer | Wire and Dimension [Inch] | Fz [N] | Mx [Nmm] | z [mm] |
|---|---|---|---|---|
| MV SD | MV SD | MV SD | ||
| Forestadent | Biostarter 0.012″ | 0.561 ±0.079 | −2.649 ±0.268 | 1.089 ±0.134 |
| Biostarter 0.014″ | 1.074 ±0.068 | −4.753 ±0.174 | 1.049 ±0.067 | |
| Biostarter 0.016″ | 1.578 ±0.105 | −7.261 ±0.391 | 1.281 ±0.085 | |
| Ormco | AlignXF 0.012″ | 0.690 ±0.035 | −3.922 ±0.159 | 0.985 ±0.059 |
| AlignXF 0.014″ | 1.321 ±0.103 | −7.384 ±0.482 | 1.133 ±0.040 | |
| AlignXF 0.016″ | 2.180 ±0.261 | −11.466 ±0.634 | 1.141 ±0.146 | |
| Dentsply Sirona | Copperloy 0.014″ | 1.126 ±0.081 | −4.810 ±0.497 | 0.998 ±0.030 |
| Copperloy 0.016″ | 1.853 ±0.506 | −5.556 ±3.748 | 1.031 ±0.086 | |
| Dentsply Sirona | Sentalloy 0.012″ medium | 0.621 ±0.073 | −3.524 ±0.425 | 0.956 ±0.052 |
| Sentalloy 0.014″ light | 0.996 ±0.071 | −5.011 ±0.448 | 0.937 ±0.186 | |
| Sentalloy 0.014″ medium | 1.175 ±0.072 | −5.623 ±0.574 | 1.058 ±0.051 | |
| Sentalloy 0.014″ heavy | 1.292 ±0.083 | −6.627 ±0.048 | 1.130 ±0.042 | |
| Sentalloy 0.016″ light | 1.442 ±0.127 | −6.781 ±0.937 | 1.135 ±0.172 | |
| Sentalloy 0.016″ medium | 1.637 ±0.328 | −9.609 ±0.871 | 1.087 ±0.015 | |
| Sentalloy 0.016″ heavy | 2.254 ±0.174 | −10.047 ±1.046 | 1.177 ±0.130 | |
| Dentsply Sirona | Sentalloy 0.012″ medium with IS | 1.066 ±0.112 | −7.264 ±0.857 | 2.205 ±0.265 |
| Sentalloy 0.014″ light with IS | 1.319 ±0.121 | −7.083 ±1.200 | 2.226 ±0.048 | |
| Sentalloy 0.014″ medium with IS | 1.722 ±0.195 | −10.342 ±3.985 | 2.572 ±0.050 | |
| Sentalloy 0.014″ heavy with IS | 2.102 ±0.065 | −13.731 ±2.884 | 2.473 ±0.108 | |
| Sentalloy 0.016″ light with IS | 2.029 ±0.132 | −10.235 ±1.647 | 2.505 ±0.067 | |
| Sentalloy 0.016″ medium with IS | 2.891 ±0.227 | −19.437 ±6.198 | 2.691 ±0.083 | |
| Sentalloy 0.016″ heavy with IS | 2.981 ±0.186 | −15.887 ±0.891 | 2.620 ±0.148 |
| Intrusion Distance [mm] | Biostarter 0.012″ | Sentalloy 0.016″ Heavy | Sentalloy 0.012″ Medium with Intrusion Steps | Sentalloy 0.016″ Heavy with Intrusion Steps |
|---|---|---|---|---|
| Fz [N] | Fz [N] | Fz [N] | Fz [N] | |
| MV SD | MV SD | MV SD | MV SD | |
| 0.000 | 0.561 ±0.079 | 2.254 ±0.174 | 1.066 ±0.112 | 2.981 ±0.186 |
| 0.025 | 0.475 ±0.066 | 1.887 ±0.126 | 1.032 ±0.075 | 2.775 ±0.110 |
| 0.050 | 0.453 ±0.044 | 1.860 ±0.105 | 1.021 ±0.119 | 2.739 ±0.090 |
| 0.075 | 0.444 ±0.035 | 1.796 ±0.143 | 1.023 ±0.080 | 2.773 ±0.081 |
| 0.100 | 0.416 ±0.036 | 1.778 ±0.219 | 0.994 ±0.088 | 2.818 ±0.065 |
| 0.150 | 0.406 ±0.045 | 1.508 ±0.142 | 0.953 ±0.091 | 2.705 ±0.139 |
| 0.200 | 0.384 ±0.019 | 1.396 ±0.095 | 0.933 ±0.072 | 2.584 ±0.132 |
| 0.400 | 0.323 ±0.026 | 1.148 ±0.056 | 0.837 ±0.084 | 2.411 ±0.091 |
| 0.800 | 0.133 ±0.016 | 0.607 ±0.030 | 0.686 ±0.111 | 2.180 ±0.104 |
| distance [mm] | Mx [Nmm] | Mx [Nmm] | Mx [Nmm] | Mx [Nmm] |
| MV SD | MV SD | MV SD | MV SD | |
| 0.000 | −2.649 ±0.268 | −11.466 ±0.634 | −7.264 ±0.857 | −15.887 ±0.891 |
| 0.025 | −2.755 ±0.465 | −11.918 ±0.427 | −7.266 ±0.932 | −16.832 ±0.554 |
| 0.050 | −2.599 ±0.517 | −11.122 ±0.455 | −7.055 ±0.565 | −16.263 ±0.670 |
| 0.075 | −2.552 ±0.265 | −10.286 ±0.331 | −6.672 ±0.839 | −15.128 ±0.968 |
| 0.100 | −2.570 ±0.419 | −9.584 ±0.801 | −6.562 ±0.982 | −14.046 ±1.484 |
| 0.150 | −2.362 ±0.322 | −9.470 ±0.224 | −6.189 ±0.690 | −14.843 ±0.417 |
| 0.200 | −2.061 ±0.245 | −8.310 ±0.814 | −6.394 ±0.756 | −14.253 ±1.512 |
| 0.400 | −1.773 ±0.285 | −7.226 ±0.664 | −5.781 ±1.024 | −12.222 ±0.960 |
| 0.800 | −0.141 ±0.126 | −2.604 ±0.851 | −4.326 ±0.973 | −10.722 ±0.716 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seidel, C.L.; Lipp, J.; Dotzer, B.; Janjic Rankovic, M.; Mertmann, M.; Wichelhaus, A.; Sabbagh, H. Investigation of Forces and Moments during Orthodontic Tooth Intrusion Using Robot Orthodontic Measurement and Simulation System (ROSS). Bioengineering 2023, 10, 1356. https://doi.org/10.3390/bioengineering10121356
Seidel CL, Lipp J, Dotzer B, Janjic Rankovic M, Mertmann M, Wichelhaus A, Sabbagh H. Investigation of Forces and Moments during Orthodontic Tooth Intrusion Using Robot Orthodontic Measurement and Simulation System (ROSS). Bioengineering. 2023; 10(12):1356. https://doi.org/10.3390/bioengineering10121356
Chicago/Turabian StyleSeidel, Corinna L., Julian Lipp, Benedikt Dotzer, Mila Janjic Rankovic, Matthias Mertmann, Andrea Wichelhaus, and Hisham Sabbagh. 2023. "Investigation of Forces and Moments during Orthodontic Tooth Intrusion Using Robot Orthodontic Measurement and Simulation System (ROSS)" Bioengineering 10, no. 12: 1356. https://doi.org/10.3390/bioengineering10121356
APA StyleSeidel, C. L., Lipp, J., Dotzer, B., Janjic Rankovic, M., Mertmann, M., Wichelhaus, A., & Sabbagh, H. (2023). Investigation of Forces and Moments during Orthodontic Tooth Intrusion Using Robot Orthodontic Measurement and Simulation System (ROSS). Bioengineering, 10(12), 1356. https://doi.org/10.3390/bioengineering10121356