


Multi-Parameter Auto-Tuning Algorithm for Mass Spectrometer Based on Improved Particle Swarm Optimization
 ,
,
Abstract
:1. Introduction
2. Methods
2.1. Standard PSO Algorithm and Simulated Annealing Algorithm
2.2. Improved PSO Algorithm
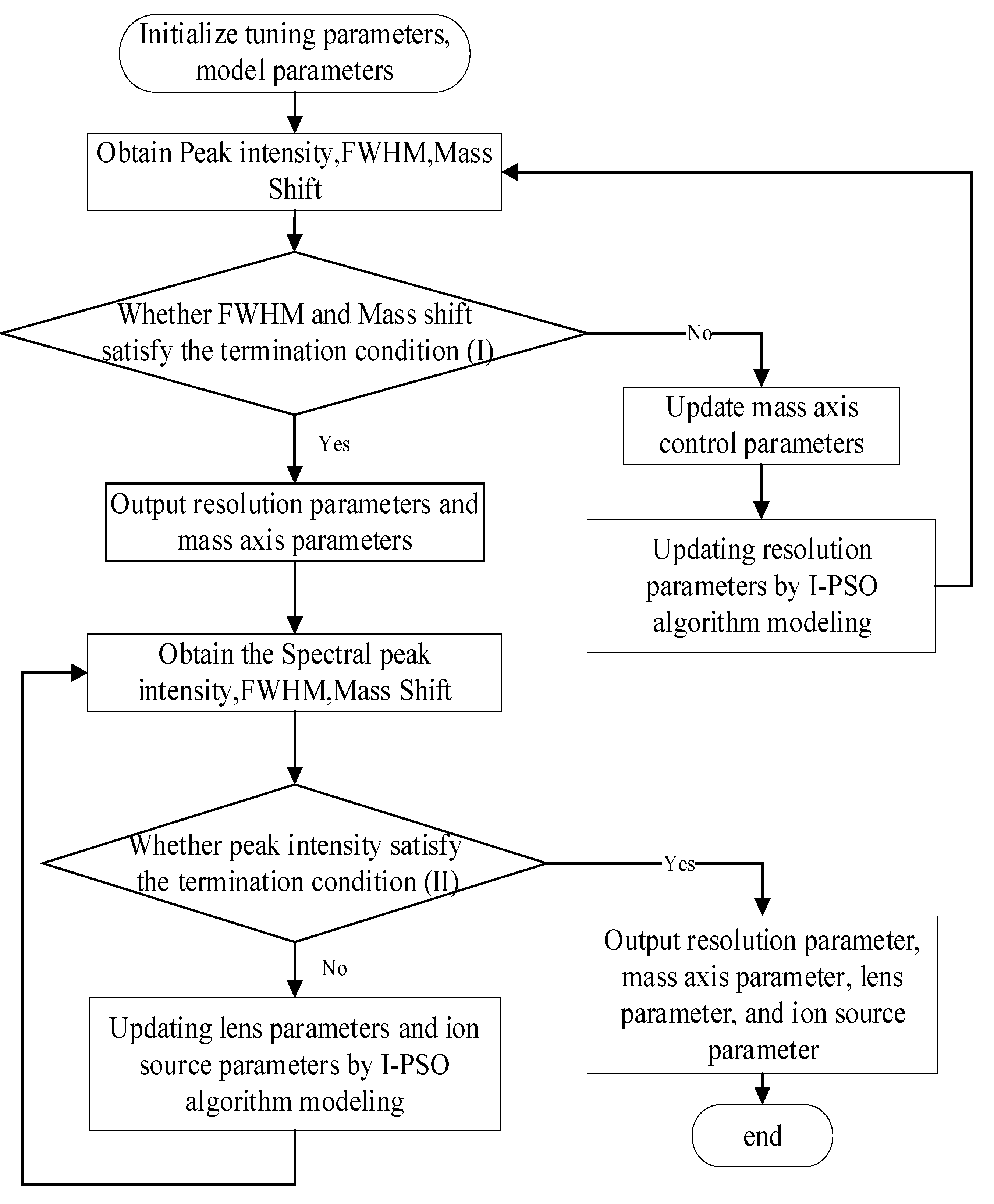
2.3. Auto-Tuning Algorithm for QMS Based on Improved PSO Algorithm
3. Results and Discussion
3.1. Benchmark Function Test
3.2. Auto-Tuning Performance Test
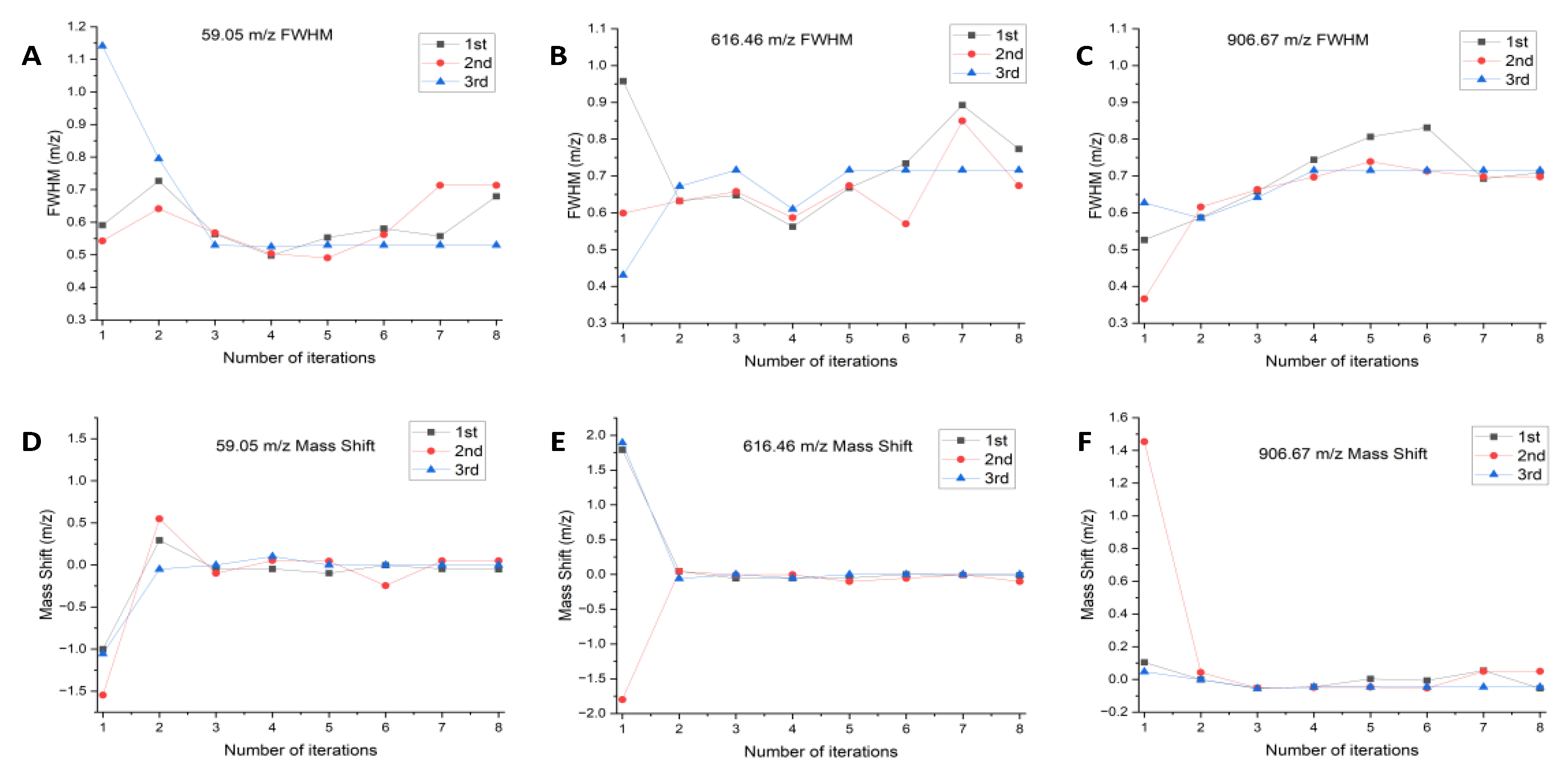
3.2.1. Auto-Calibration Testing of Resolution and Mass Axis
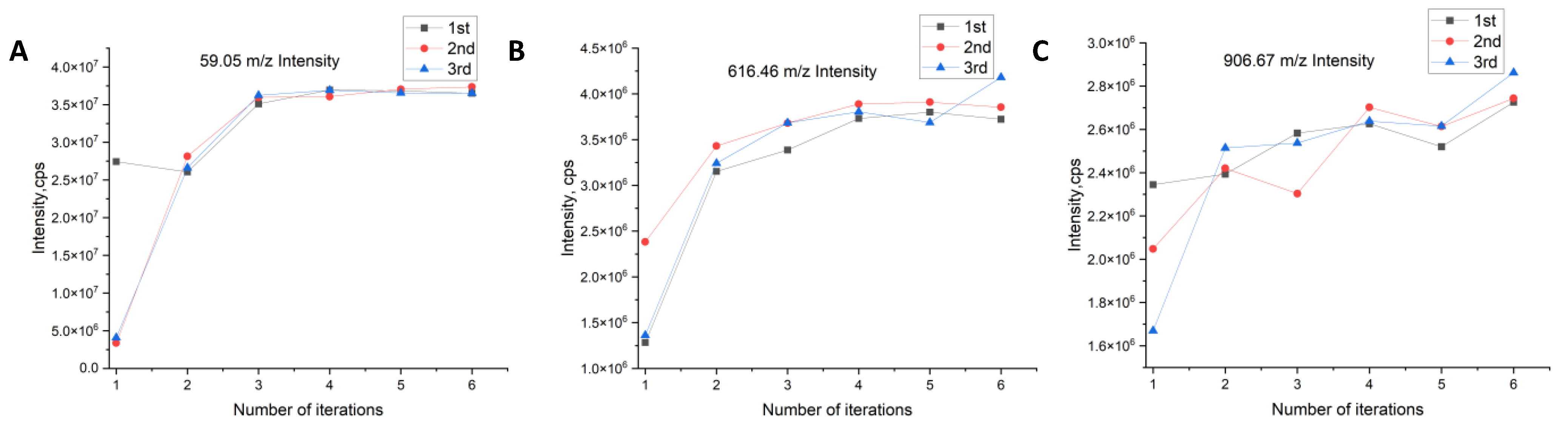
3.2.2. Auto-Optimization Testing of Lens and Ion Source Parameters
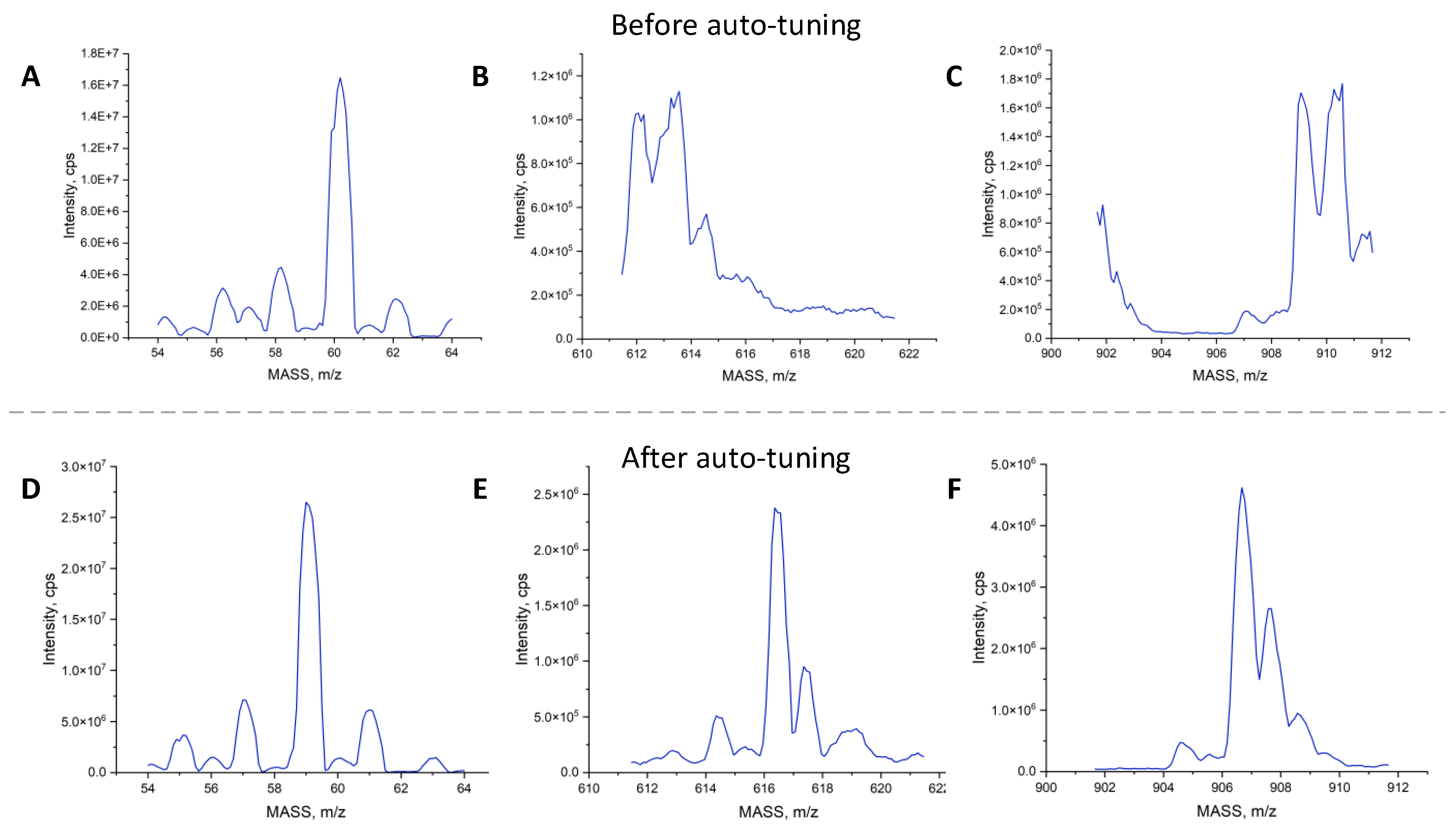
3.2.3. Performance and Stability Testing
- (1)
- This algorithm improves the intelligence level of the instrument, and the auto-tuning algorithm realizes the function of automatic optimization of the instrument compared with the manual tuning of the instrument, which still requires experienced engineers.
- (2)
- This algorithm realizes that the traditional iterative algorithm can easily fall into the local optimal solution problem from a global perspective; thus, the instrument can be automatically tuned to the real optimal state.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Douglas, D.J. Linear quadrupoles in mass spectrometry. Mass Spectrom. Rev. 2009, 28, 937–960. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Y.J.; Dong, M.; Sun, W.J.; Zhang, S.Z.; Wang, X.H.; Wu, X.M.; Zhao, L.; Chen, L.; Wu, C.Y.; Song, Y.; et al. A study of the gas interference effects in quadrupole mass spectrometer. Meas. Sci. Technol. 2022, 33, 065019. [Google Scholar]
- Ens, W.; Standing, K.G. Hybrid quadrupole/time-of-flight mass spectrometers for analysis of biomolecules. Method Enzymol. 2005, 402, 49–78. [Google Scholar]
- Thoren, K.L.; Colby, J.M.; Shugarts, S.B.; Wu, A.H.B.; Lynch, K.L. Comparison of information-dependent acquisition on a tandem quadrupole TOF vs. a triple quadrupole linear ion trap mass spectrometer for broad-spectrum drug screening. Clin. Chem. 2016, 62, 170–178. [Google Scholar] [CrossRef] [PubMed]
- Perez-Arvizu, O.; Bernal, J.P. Measurement of Sulfur in Environmental Samples Using the Interference Standard Method with an O-2-pressurized Reaction Cell and a Single-Quadrupole Inductively Coupled Plasma Mass Spectrometer. Rapid Commun. Mass Spectrom. 2021, 35, e9034. [Google Scholar] [CrossRef] [PubMed]
- Peterson, A.C.; Balloon, A.J.; Westphall, M.S.; Coon, J.J. Development of a GC/quadrupole-Orbitrap mass spectrometer, Part II: New approaches for discovery metabolomics. Anal. Chem. 2014, 86, 10044–10051. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.W.; Prabhu, G.R.D.; Hsu, C.Y.; Urban, P.L. Tuning electrospray ionization with low-frequency sound. J. Am. Soc. Mass Spectrom. 2022, 33, 1883–1890. [Google Scholar] [CrossRef] [PubMed]
- Kenny, D.J. Dynamic Resolution Correction of Quadrupole Mass Analyser. U.S. Patent 9,324,543, 26 April 2016. [Google Scholar]
- Syed, S.U.; Hogan, T.J.; Antony Joseph, M.J.; Maher, S.; Taylor, S. Quadrupole mass filter: Design and performance for operation in stability zone 3. J. Am. Soc. Mass Spectrom. 2013, 24, 1493–1500. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Jiang, Y.; Liu, M.; Dai, X.; Fang, X.; Chen, D.; Qiu, C.; Huang, Z. Research on automatic adjustment of mass resolution in quadrupole mass spectrometry. J. Chin. Mass Spectrom. Soc. 2020, 41, 118–124. [Google Scholar]
- Clerc, M.; Kennedy, J. The Particle Swarm—Explosion, Stability, and Convergence in a Multidimensional Complex Space. IEEE Trans. Evolut. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef]
- Riget, J.; Vesterstrøm, J.S. A Diversity-Guided Particle Swarm Optimizer—The ARPSO; Department of Computer Science, University of Aarhus: Aarhus, Denmark, 2002. [Google Scholar]
- Yu, Y.; Li, Y.; Li, J. Parameter identification of a novel strain stiffening model for magnetorheological elastomer base isolator utilizing enhanced particle swarm optimization. J. Intell. Mater. Syst. Struct. 2014, 26, 2446–2462. [Google Scholar] [CrossRef]
- Yu, Y.; Li, Y.; Li, J. Forecasting hysteresis behaviours of magnetorheological elastomer base isolator utilizing a hybrid model based on support vector regression and improved particle swarm optimization. Smart Mater. Struct. 2015, 24, 035025. [Google Scholar] [CrossRef]
- Bergh, F. A cooperative approach to particle swarm optimization. IEEE Trans. Evol. Comput. 2004, 8, 225–239. [Google Scholar]
- Yue, Y.; Cao, L.; Chen, H.; Chen, Y.; Su, Z. Towards an Optimal KELM Using the PSO-BOA Optimization Strategy with Applications in Data Classification. Biomimetics 2023, 8, 306. [Google Scholar] [CrossRef] [PubMed]
- Kennedy, J.; Mendes, R. Population structure and particle swarm performance. In Proceedings of the 2002 Congress on Evolutionary Computation, Honolulu, HI, USA, 12–17 May 2002; pp. 1671–1676. [Google Scholar]
- Arumugam, M.S.; Chandramohan, A.; Rao, M.V.C. Competitive Approaches to PSO Algorithms via New Acceleration Co-Efficient Variant with Mutation Operators. In Proceedings of the International Conference on Computational Intelligence & Multimedia Applications IEEE, Las Vegas, NV, USA, 16–18 August 2005; pp. 225–230. [Google Scholar]
- Kennedy, J. Why does it need velocity? In Proceedings of the 2005 IEEE Swarm Intelligence Symposium (SIS 2005), Pasadena, CA, USA, 8–10 June 2005. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; IEEE Publications: Piscataway, NJ, USA, 1995; pp. 1942–1948. [Google Scholar]
- Marini, F.; Walczak, B. Particle swarm optimization (PSO). A tutorial. Chemom. Intell. Lab. Syst. 2015, 149, 153–165. [Google Scholar] [CrossRef]
- Du, K.-L.; Swamy, M.; Du, K.-L.; Swamy, M. Simulated Annealing, Search and Optimization by Metaheuristics: Techniques and Algorithms Inspired by Nature; Birkhäuser: Cham, Switzerland, 2016; pp. 29–36. [Google Scholar]
- Wang, Z.; Tian, J.; Feng, K. Optimal allocation of regional water resources based on simulated annealing particle swarm optimization algorithm. Energy Rep. 2022, 8, 9119–9126. [Google Scholar] [CrossRef]
- Delahaye, D.; Chaimatanan, S.; Mongeau, M. Simulated Annealing: From Basics to Applications. In Handbook of Metaheuristics; Springer: Berlin/Heidelberg, Germany, 2019; pp. 1–35. [Google Scholar]
- Zhao, Z.; Huang, S.; Wang, W. Simplified Particle Swarm Optimization Algorithm Based on Stochastic Inertia Weight. Appl. Res. Comput. Jisuanji Yingyong Yanjiu 2014, 31, 361–391. [Google Scholar]
- Nabi, S.; Ahmad, M.; Ibrahim, M.; Hamam, H. AdPSO: Adaptive PSO-based task scheduling approach for cloud computing. Sensors 2022, 22, 920. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.-X.; Gong, H.-L.; Ding, X.-Q. Investigation and comparison of inertia weight control schemes in particle swarm Optimization. In Proceedings of the 15th International Conference on Advanced Computational Intelligence (ICACI), Seoul, Republic of Korea, 6–9 May 2023; IEEE Publications: Piscataway, NJ, USA, 2023; Volume 2023, pp. 1–8. [Google Scholar]
- Chrouta, J.; Farhani, F.; Zaafouri, A.; Jemli, M. Comparing inertia weights in multi-swarm particle swarm optimization. In Proceedings of the IEEE 2019 International Conference on Signal, Control and Communication (SCC), Hammamet, Tunisia, 16–18 December 2019; pp. 278–283. [Google Scholar]
- Gupta, I.K.; Choubey, A.; Choubey, S. Particle swarm optimization with selective multiple inertia weights. In Proceedings of the 8th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Delhi, India, 3–5 July 2017; pp. 1–6. [Google Scholar]
- Li, R.; Wang, Y. Improved particle swarm optimization based on levy flights. J. Syst. Simul. 2017, 29, 1685. [Google Scholar]
- Kwon, Y.; Heo, S.; Kang, K.; Bae, C. Particle swarm optimization using adaptive boundary correction for human activity recognition. KSII Trans. Internet Inf. Syst. 2014, 8, 2070–2086. [Google Scholar]
- Awad, N.H.; Ali, M.Z.; Suganthan, P.N.; Liang, J.J.; Qu, B.Y. Problem Definitions and Evaluation Criteria for the CEC 2017 Special Session and Competition on Single Objective Real-Parameter Numerical Optimization; Technical Report; Nanyang Technological University: Singapore, 2016. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Functions Type | Functions No. | Functions | |
|---|---|---|---|
| Unimodal function | F1 | Shifted and rotated sum of different power function | 200 |
| Simple multimodal functions | F2 | Shifted and rotated rosenbrock’s function | 400 |
| F3 | Shifted and rotated expanded Scaffer’s F6 function | 600 | |
| F4 | Shifted and rotated Schwefel’s function | 1000 | |
| Hybrid functions | F5 | Hybrid function 5 (N = 4) | 1500 |
| F6 | Hybrid function 6 (N = 6) | 2000 | |
| Composition Functions | F7 | Composition function 5 (N = 5) | 2500 |
| F8 | Composition function 8 (N = 6) | 2800 |
| NO. | Mass Shift (m/z) | FWHM (m/z) | Intensity (CPS, MCA = 5) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 59.05 | 616.46 | 906.67 | 59.05 | 616.46 | 906.67 | 59.05 | 616.46 | 906.67 | |
| 1 | −0.0981 | 0.0955 | −0.0528 | 0.6537 | 0.6742 | 0.6569 | 3.33 × 107 | 2.58 × 106 | 2.63 × 106 |
| 2 | −0.0892 | −0.1028 | −0.0443 | 0.5950 | 0.6802 | 0.6900 | 3.13 × 107 | 2.98 × 106 | 2.64 × 106 |
| 3 | −0.0962 | 0.0463 | −0.0952 | 0.6970 | 0.6170 | 0.6575 | 3.19 × 107 | 1.93 × 106 | 2.78 × 106 |
| 4 | −0.0500 | 0.0948 | −0.1503 | 0.6259 | 0.6371 | 0.6170 | 3.26 × 107 | 2.36 × 106 | 2.22 × 106 |
| 5 | −0.0513 | 0.0942 | −0.0447 | 0.6497 | 0.6298 | 0.6615 | 3.37 × 107 | 2.37 × 106 | 2.71 × 106 |
| 6 | −0.0489 | 0.0414 | −0.1490 | 0.6239 | 0.7744 | 0.6063 | 3.32 × 107 | 2.74 × 106 | 2.47 × 106 |
| 7 | −0.0483 | 0.0983 | −0.0495 | 0.6180 | 0.7929 | 0.6132 | 3.06 × 107 | 2.77 × 106 | 2.54 × 106 |
| 8 | 0.0030 | 0.0419 | −0.0510 | 0.5464 | 0.7758 | 0.6135 | 2.96 × 107 | 2.89 × 106 | 2.43 × 106 |
| 9 | −0.0010 | 0.1471 | −0.0541 | 0.6519 | 0.6950 | 0.6408 | 2.89 × 107 | 2.74 × 106 | 2.62 × 106 |
| 10 | 0.0003 | 0.2331 | −0.0995 | 0.6340 | 0.6557 | 0.6177 | 2.96 × 107 | 2.61 × 106 | 2.33 × 106 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, M.; Li, L.; Xiong, B.; Feng, L.; Cheng, W.; Dong, W.-F. Multi-Parameter Auto-Tuning Algorithm for Mass Spectrometer Based on Improved Particle Swarm Optimization. Bioengineering 2023, 10, 1079. https://doi.org/10.3390/bioengineering10091079
Jia M, Li L, Xiong B, Feng L, Cheng W, Dong W-F. Multi-Parameter Auto-Tuning Algorithm for Mass Spectrometer Based on Improved Particle Swarm Optimization. Bioengineering. 2023; 10(9):1079. https://doi.org/10.3390/bioengineering10091079
Chicago/Turabian StyleJia, Mingzheng, Liang Li, Baolin Xiong, Le Feng, Wenbo Cheng, and Wen-Fei Dong. 2023. "Multi-Parameter Auto-Tuning Algorithm for Mass Spectrometer Based on Improved Particle Swarm Optimization" Bioengineering 10, no. 9: 1079. https://doi.org/10.3390/bioengineering10091079
APA StyleJia, M., Li, L., Xiong, B., Feng, L., Cheng, W., & Dong, W. -F. (2023). Multi-Parameter Auto-Tuning Algorithm for Mass Spectrometer Based on Improved Particle Swarm Optimization. Bioengineering, 10(9), 1079. https://doi.org/10.3390/bioengineering10091079