BLE RSS Measurements Dataset for Research on Accurate Indoor Positioning





Abstract
:1. Introduction
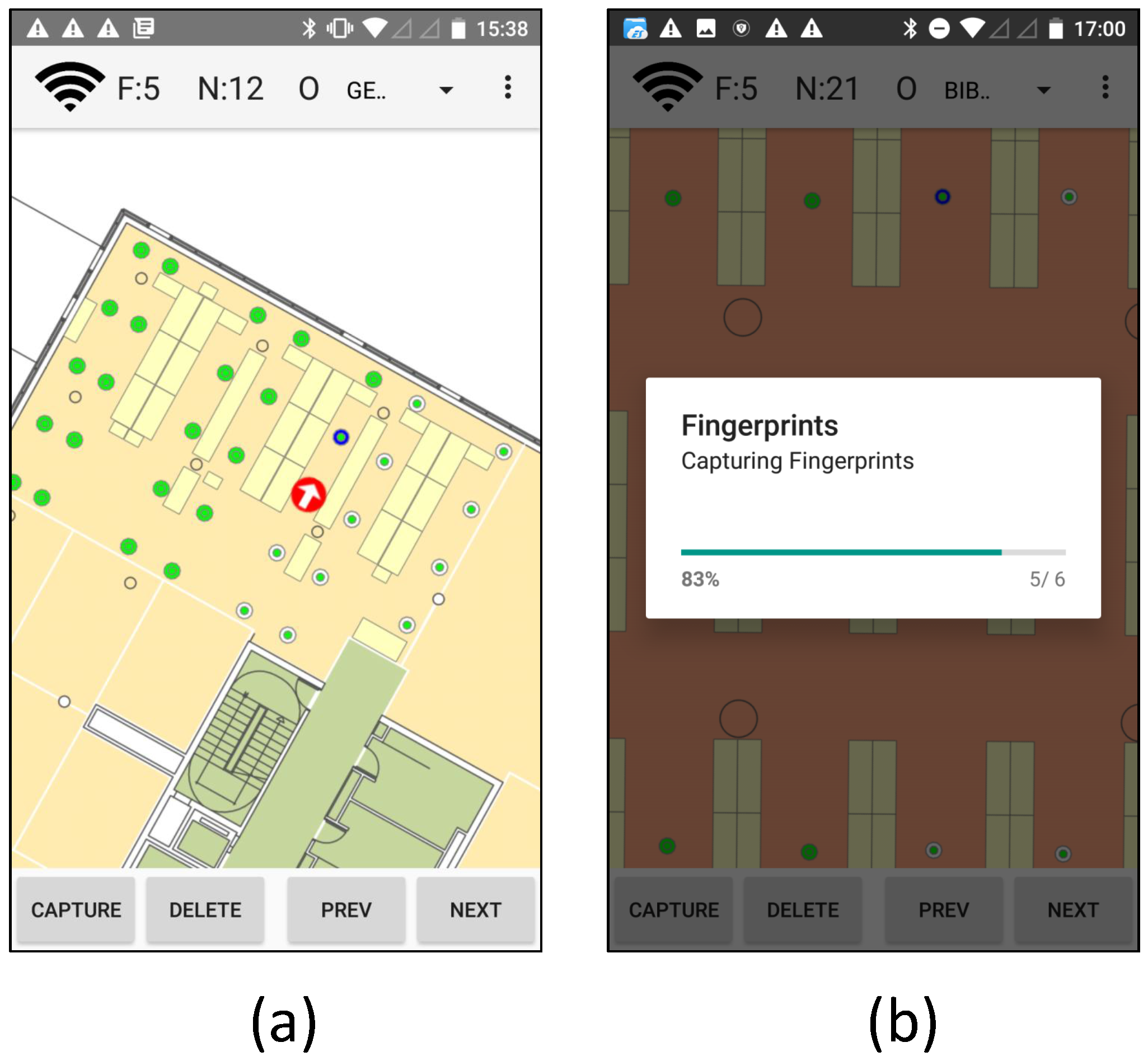
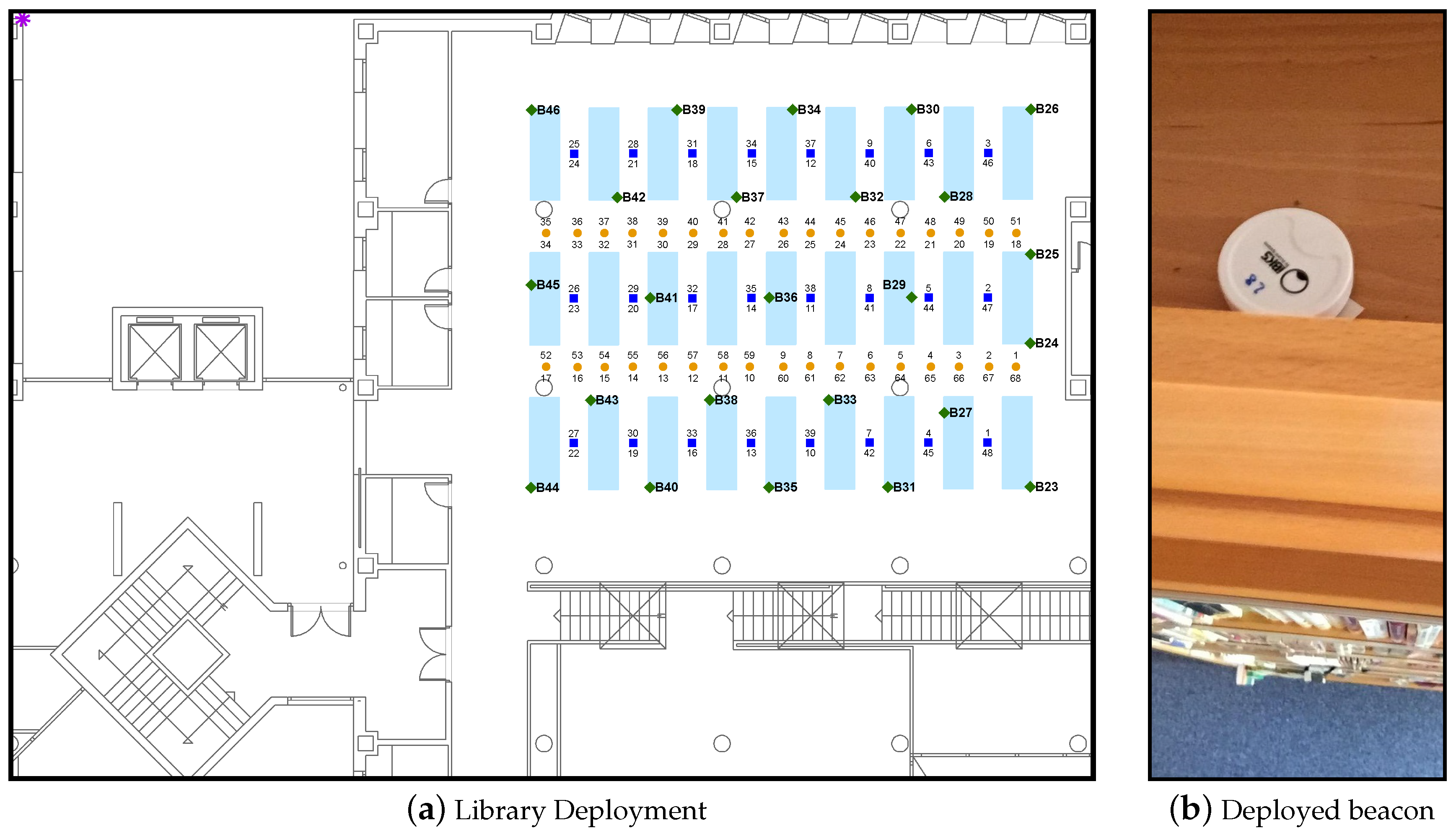
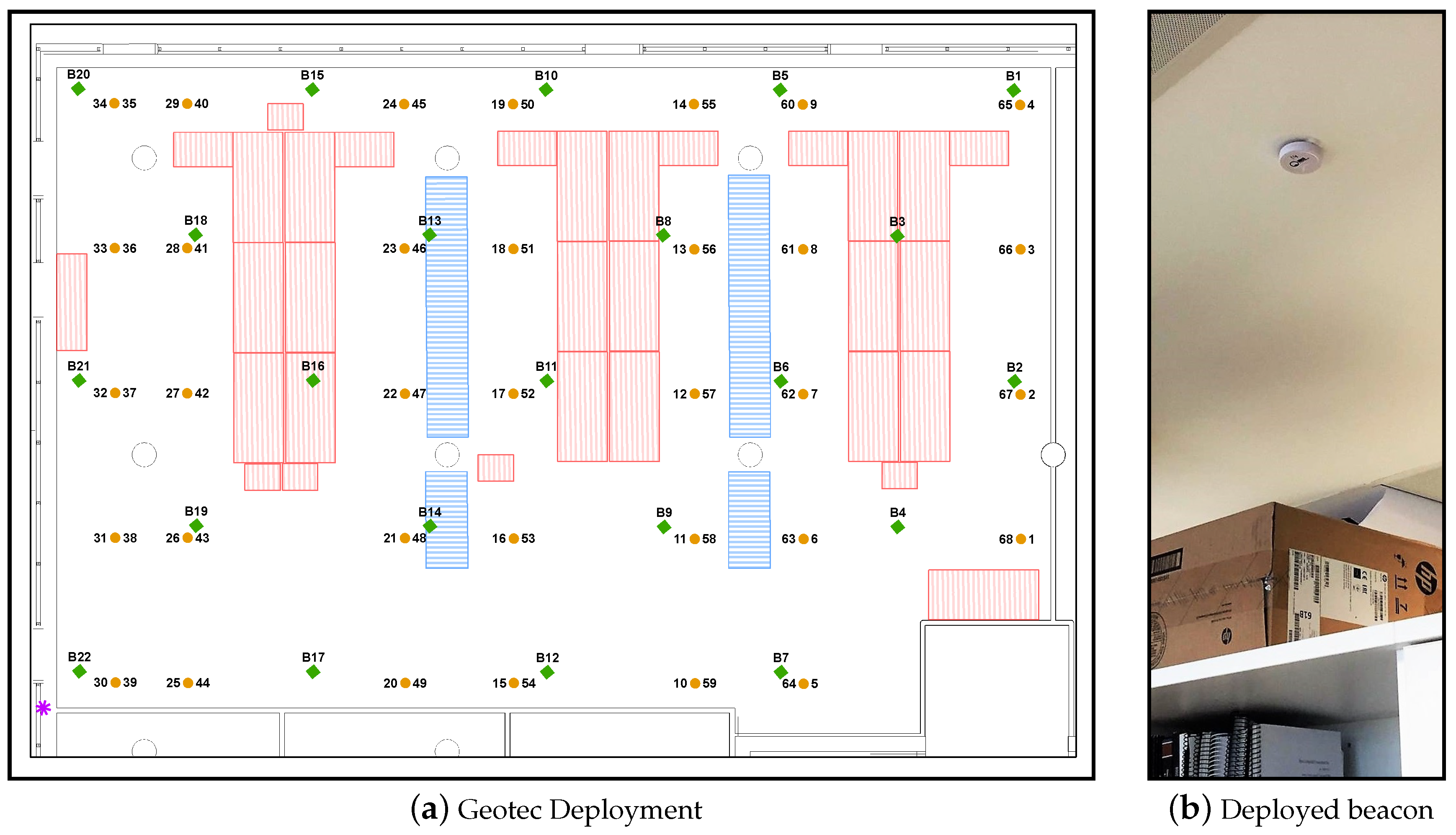
2. Setup and Collection Procedure
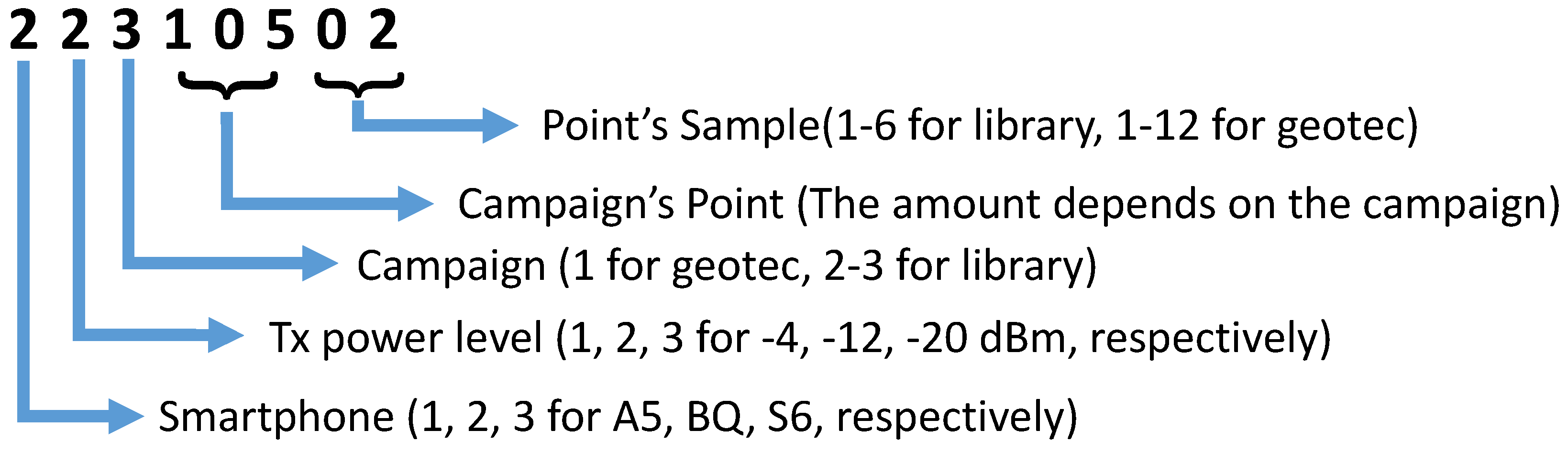
3. The BLE RSS Database
4. Usage Examples
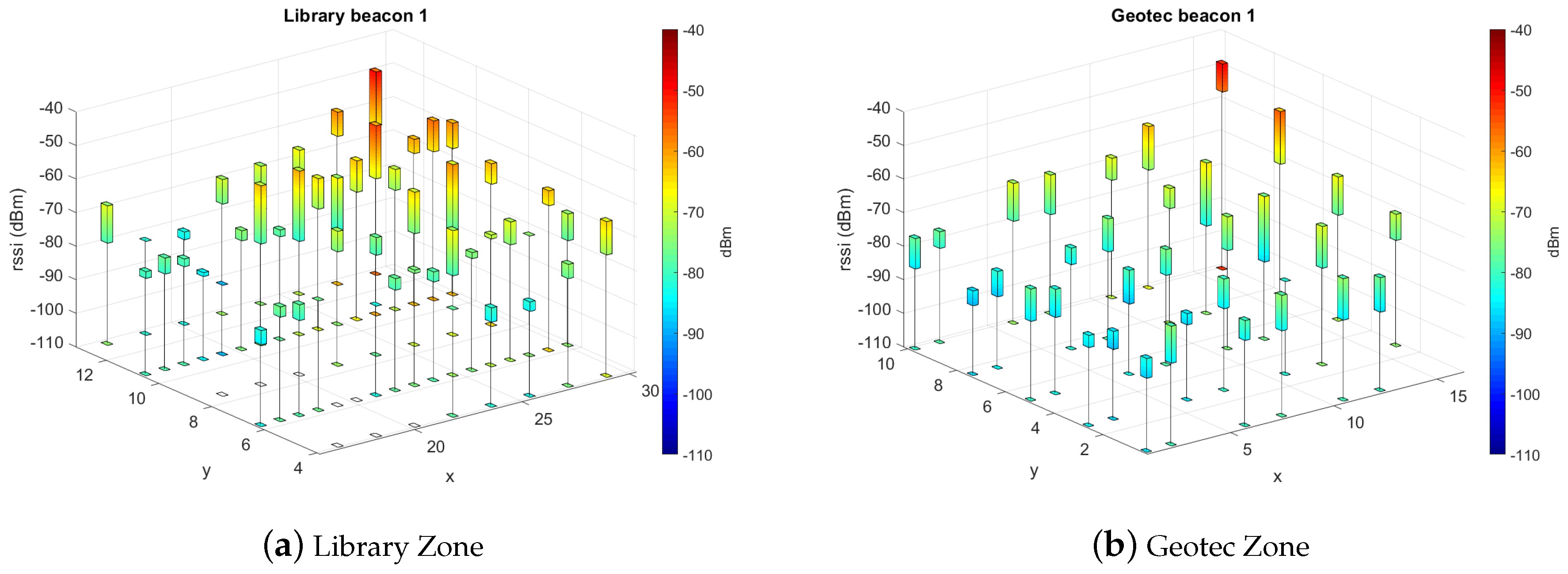
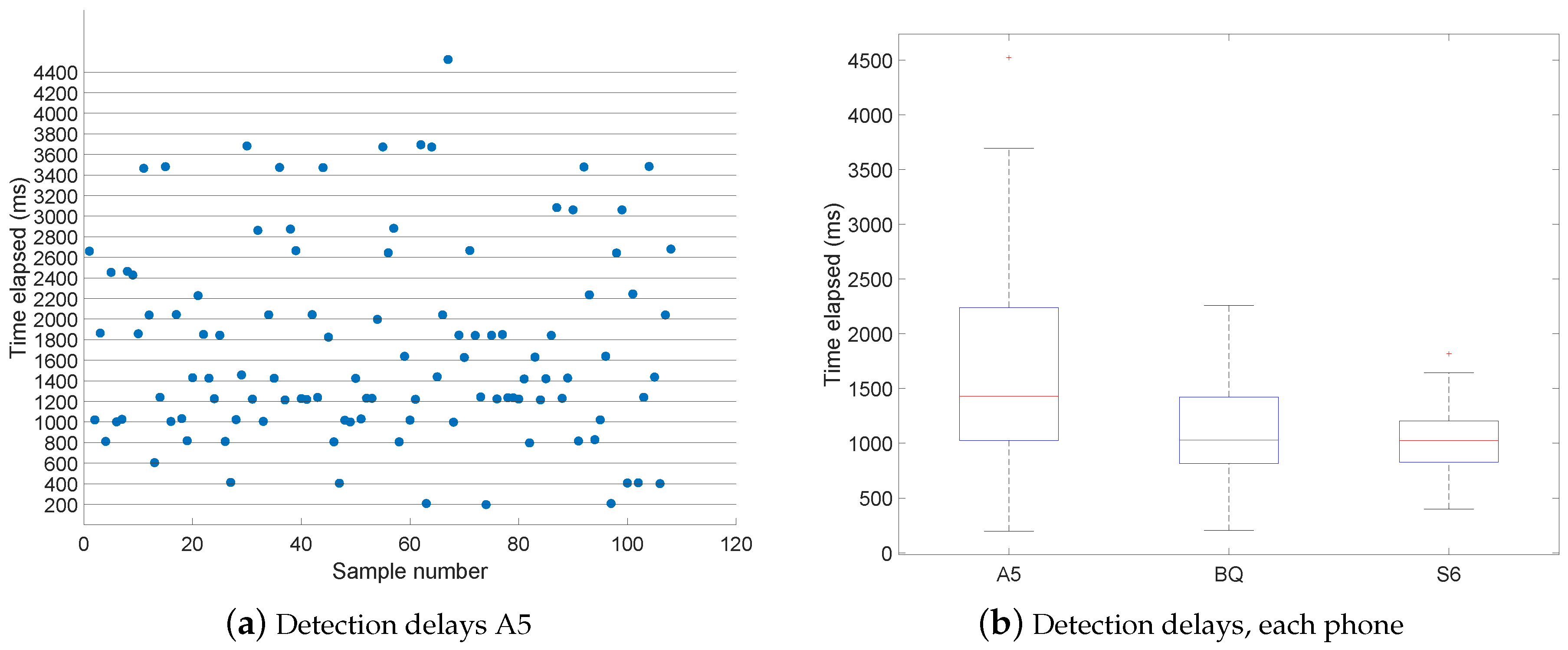
4.1. Environment and Device: Signal Intensities and Advertisements Loss
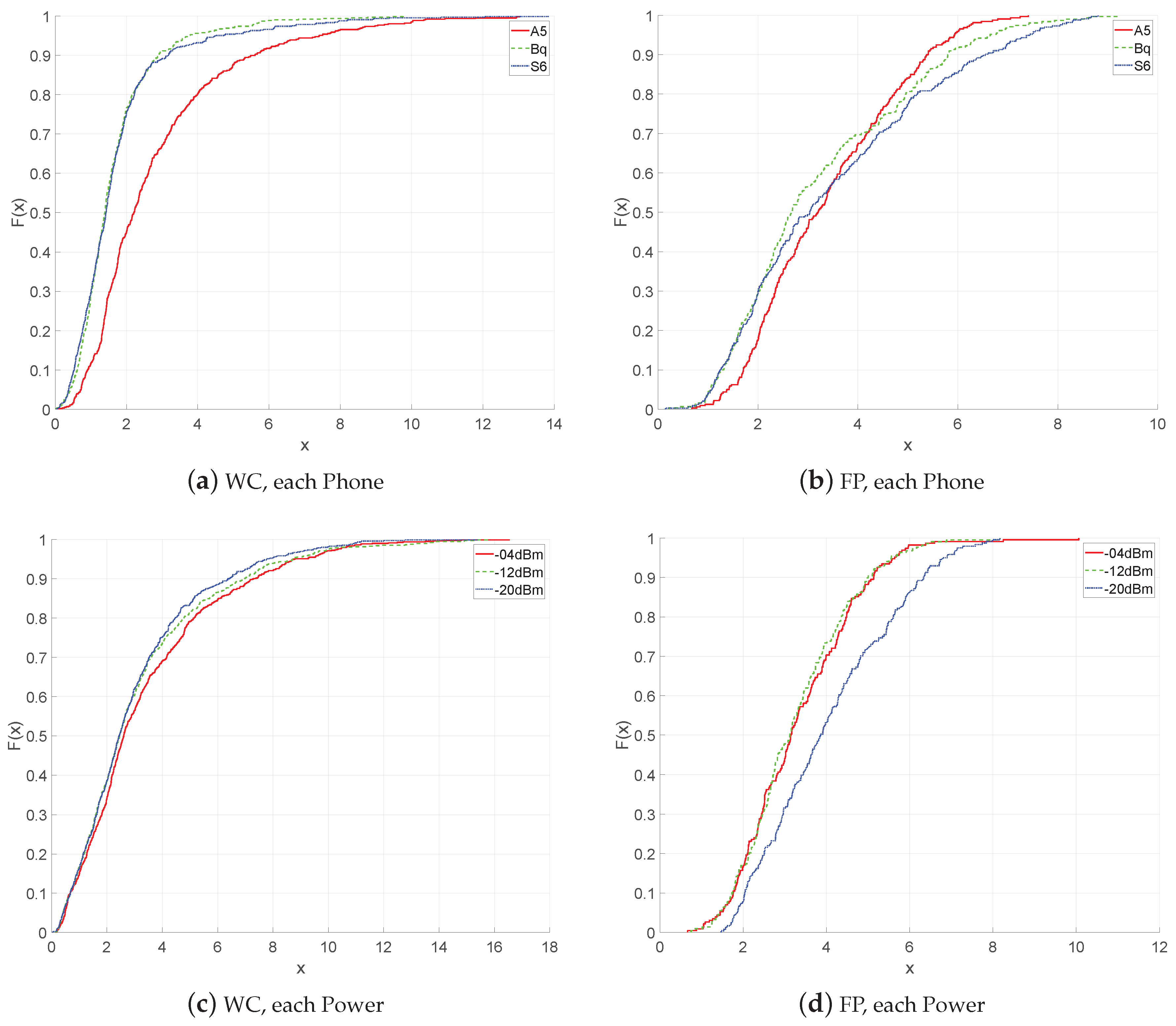
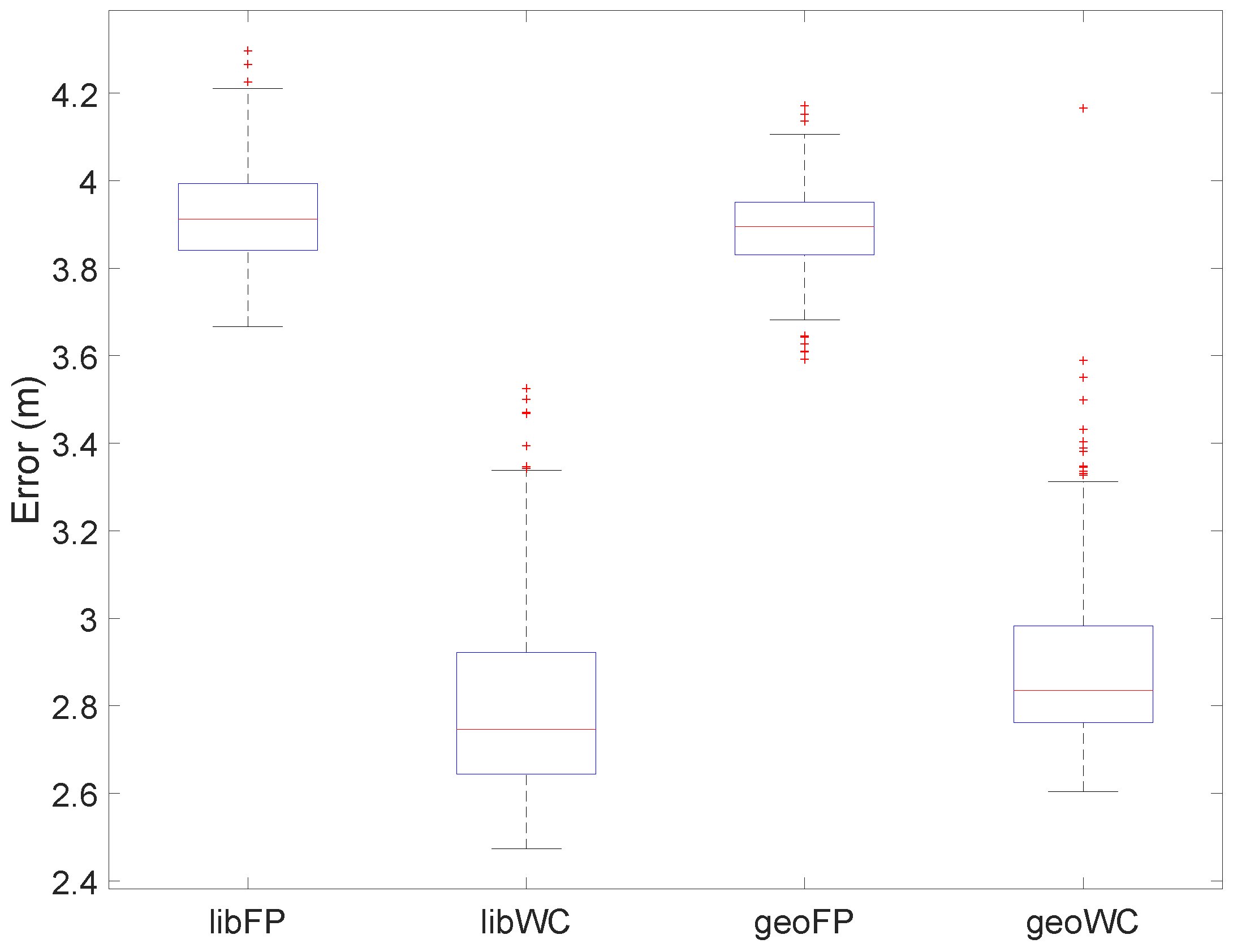
4.2. Positioning Accuracy
- All: all beacons detected in a fingerprint are used. All estimations are used to compute the accuracy metric.
- K10: k = 10, (10 was the k value providing the best accuracy). Take notice that the number of beacons detected in a fingerprint can be lower than 10. All estimations are used to compute the accuracy metric.
- KF10: k = 10. Estimations for samples with less than 10 detected beacons are considered unfeasible and thus, not used to compute the accuracy metric.
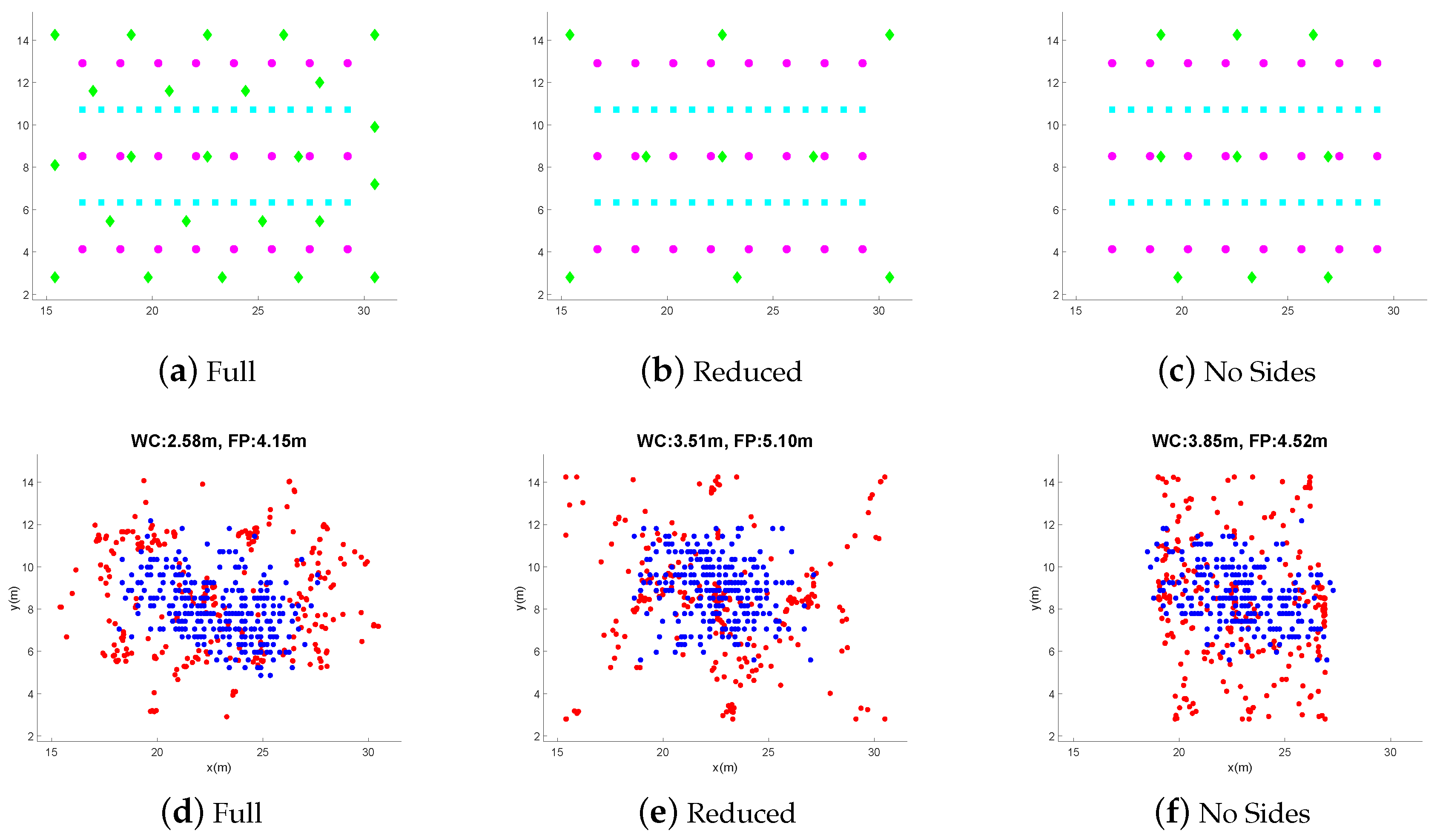
4.3. Beacon Deployment, Estimations Positions and Robustness
5. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Huang, H.; Gartner, G. Current Trends and Challenges in Location-Based Services. ISPRS Int. J. Geo-Inf. 2018, 7, 199. [Google Scholar] [CrossRef]
- Tariq, Z.B.; Cheema, D.M.; Kamran, M.Z.; Naqvi, I.H. Non-GPS Positioning Systems: A Survey. ACM Comput. Surv. 2017, 50, 57:1–57:34. [Google Scholar] [CrossRef]
- Davidson, P.; Piché, R. A Survey of Selected Indoor Positioning Methods for Smartphones. IEEE Commun. Surv. Tutor. 2017, 19, 1347–1370. [Google Scholar] [CrossRef]
- Ban, R.; Kaji, K.; Hiroi, K.; Kawaguchi, N. Indoor positioning method integrating pedestrian Dead Reckoning with magnetic field and WiFi fingerprints. In Proceedings of the 2015 Eighth International Conference on Mobile Computing and Ubiquitous Networking (ICMU), Hakodate City, Japan, 20–22 January 2015; IEEE: New York, NY, USA, 2015; pp. 167–172. [Google Scholar]
- Barsocchi, P.; Crivello, A.; La Rosa, D.; Palumbo, F. A multisource and multivariate dataset for indoor localization methods based on WLAN and geo-magnetic field fingerprinting. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; IEEE: New York, NY, USA, 2016; pp. 1–8. [Google Scholar]
- Ozdenizci, B.; Coskun, V.; Ok, K. NFC internal: An indoor navigation system. Sensors 2015, 15, 7571–7595. [Google Scholar] [CrossRef] [PubMed]
- Hassan, N.U.; Naeem, A.; Pasha, M.A.; Jadoon, T.; Yuen, C. Indoor positioning using visible led lights: A survey. ACM Comput. Surv. (CSUR) 2015, 48, 20. [Google Scholar] [CrossRef]
- Hou, Y.; Xiao, S.; Bi, M.; Xue, Y.; Pan, W.; Hu, W. Single LED Beacon-Based 3-D Indoor Positioning Using Off-the-Shelf Devices. IEEE Photonics J. 2016, 8, 1–11. [Google Scholar] [CrossRef]
- Saputra, M.R.U.; Markham, A.; Trigoni, N. Visual SLAM and Structure from Motion in Dynamic Environments: A Survey. ACM Comput. Surv. (CSUR) 2018, 51, 37. [Google Scholar] [CrossRef]
- He, S.; Chan, S.H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Faragher, R.; Harle, R. Location fingerprinting with bluetooth low energy beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Yang, Z.; Wu, C.; Zhou, Z.; Zhang, X.; Wang, X.; Liu, Y. Mobility increases localizability: A survey on wireless indoor localization using inertial sensors. ACM Comput. Surv. (CSUR) 2015, 47, 54. [Google Scholar]
- Bull, J.F. Wireless geolocation—Advantages and disadvantages of the two basic approaches for E-911. IEEE Veh. Technol. Mag. 2009, 4, 45–53. [Google Scholar] [CrossRef]
- Kangas, A.; Siomina, I.; Wigren, T. Positioning in LTE. In Handbook of Position Location; John Wiley and Sons, Ltd.: New York, NY, USA, 2011; Chapter 32; pp. 1081–1127. [Google Scholar]
- Koivisto, M.; Hakkarainen, A.; Costa, M.; Kela, P.; Leppanen, K.; Valkama, M. High-Efficiency Device Positioning and Location-Aware Communications in Dense 5G Networks. IEEE Commun. Mag. 2017, 55, 188–195. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.; Richter, P.; Lohan, E.S. Opportunities and Challenges in the Industrial Internet of Things based on 5G Positioning. In Proceedings of the 2018 8th International Conference on Localization and GNSS (ICL-GNSS), Guimaraes, Portigal, 26–28 June 2018; IEEE: New York, NY, USA, 2018; pp. 1–6. [Google Scholar]
- Bluetooth SIG, Inc. Bluetooth Market Update. Available online: https://www.bluetooth.com/markets/market-report (accessed on 21 December 2018).
- Use of Bluetooth Beacon Technology in Smart Airport. Available online: https://www.amarinfotech.com/use-of-bluetooth-beacon-technology-in-smart-airport.html (accessed on 21 December 2018).
- Wang, C.S. An AR mobile navigation system integrating indoor positioning and content recommendation services. World Wide Web 2018. [Google Scholar] [CrossRef]
- Jeon, K.E.; She, J.; Soonsawad, P.; Ng, P.C. BLE Beacons for Internet of Things Applications: Survey, Challenges, and Opportunities. IEEE Internet Things J. 2018, 5, 811–828. [Google Scholar] [CrossRef]
- The Hitchhikers Guide to iBeacon Hardware: A Comprehensive Report by Aislelabs. Available online: https://www.aislelabs.com/reports/beacon-guide/ (accessed on 21 December 2018).
- Bluetooth Special Interest Group Bluetooth Specification Core Versione 4.0, 2010. Available online: https://www.bluetooth.org/docman/handlers/downloaddoc.ashx (accessed on 21 December 2018).
- Potortì, F.; Crivello, A.; Palumbo, F. 11—The EvAAL Evaluation Framework and the IPIN Competitions. In Geographical and Fingerprinting Data to Create Systems for Indoor Positioning and Indoor/Outdoor Navigation; Conesa, J., Pérez-Navarro, A., Torres-Sospedra, J., Montoliu, R., Eds.; Intelligent Data-Centric Systems; Academic Press: New York, NY, USA, 2019; pp. 209–224. [Google Scholar]
- Mendoza-Silva, G.M.; Richter, P.; Torres-Sospedra, J.; Lohan, E.S.; Huerta, J. Long-Term WiFi Fingerprinting Dataset for Research on Robust Indoor Positioning. Data 2018, 3, 3. [Google Scholar] [CrossRef]
- Popleteev, A. AmbiLoc: A year-long dataset of FM, TV and GSM fingerprints for ambient indoor localization. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Hanley, D.; Faustino, A.; Zelman, S.; Degenhardt, D.; Bretl, T. MagPIE: A Dataset for Indoor Positioning with Magnetic Anomalies. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Tóth, Z.; Tamás, J. Miskolc IIS Hybrid IPS: Dataset for Hybrid Indoor Positioning. In Proceedings of the 26st International Conference on Radioelektronika, Kosice, Slovakia, 19–20 April 2016; lIEEE: New York, NY, USA, 2016; pp. 408–412. [Google Scholar]
- Iqbal, Z.; Luo, D.; Henry, P.; Kazemifar, S.; Rozario, T.; Yan, Y.; Westover, K.; Lu, W.; Nguyen, D.; Long, T.; et al. Accurate real time localization tracking in a clinical environment using Bluetooth Low Energy and deep learning. PLoS ONE 2018, 13, e0205392. [Google Scholar] [CrossRef] [PubMed]
- Byrne, D.; Kozlowski, M.; Santos-Rodriguez, R.; Piechocki, R.; Craddock, I. Residential wearable RSSI and accelerometer measurements with detailed location annotations. Sci. Data 2018, 5, 180168. [Google Scholar] [CrossRef]
- Sikeridis, D.; Papapanagiotou, I.; Devetsikiotis, M. BLEBeacon: A Real-Subject Trial Dataset from Mobile Bluetooth Low Energy Beacons. arXiv, 2018; arXiv:1802.08782. [Google Scholar]
- Sadowski, S.; Spachos, P. RSSI-Based Indoor Localization with the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Mohammadi, M.; Al-Fuqaha, A.; Guizani, M.; Oh, J.S. Semi-supervised Deep Reinforcement Learning in Support of IoT and Smart City Services. IEEE Internet Things J. 2017. [Google Scholar] [CrossRef]
- Lazik, P.; Rajagopal, N.; Shih, O.; Sinopoli, B.; Rowe, A. ALPS: A bluetooth and ultrasound platform for mapping and localization. In Proceedings of the 13th ACM Conference on Embedded Networked Sensor Systems, Seoul, Korea, 1–4 November 2015; ACM: New York, NY, USA, 2015; pp. 73–84. [Google Scholar]
- Baronti, P.; Barsocchi, P.; Chessa, S.; Mavilia, F.; Palumbo, F. Indoor Bluetooth Low Energy Dataset for Localization, Tracking, Occupancy, and Social Interaction. Sensors 2018, 18, 4462. [Google Scholar] [CrossRef]
- The Complete Beacon Industry Report: Current Technology and Recent History. Available online: http://goto.kontakt.io/industry-report-whitepaper (accessed on 21 December 2018).
- Torres-Sospedra, J.; Montoliu, R.; Mendoza-Silva, G.M.; Belmonte, O.; Rambla, D.; Huerta, J. Providing Databases for Different Indoor Positioning Technologies: Pros and Cons of Magnetic Field and Wi-Fi Based Positioning. Mobile Inf. Syst. 2016, 2016. Available online: http://indoorloc.uji.es/databases/geotecDatabaseWGS.zip (accessed on 21 December 2018). [CrossRef]
- Accent Systems IBKS 105. Available online: https://accent-systems.com/product/ibks-105 (accessed on 20 June 2018).
- Nordic Semiconductor nRF51822 Core. Available online: https://www.nordicsemi.com/Products/Low-power-short-range-wireless/nRF51822 (accessed on 21 December 2018).
- Rappaport, T.S. Wireless Communications: Principles and Practice; Prentice Hall PTR: Englewood Cliffs, NJ, USA, 1996; Volume 2. [Google Scholar]
- Faragher, R.; Harle, R. An analysis of the accuracy of bluetooth low energy for indoor positioning applications. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+’14), Tampa, FL, USA, 8–12 September 2014; pp. 201–210. [Google Scholar]
- Bouchard, K.; Ramezani, R.; Naeim, A. Features based proximity localization with Bluetooth emitters. In Proceedings of the 2016 IEEE 7th Annual Ubiquitous Computing, Electronics Mobile Communication Conference (UEMCON), New York, NY, USA, 20–22 October 2016; pp. 1–5. [Google Scholar]
- Mendoza-Silva, G.M.; Torres-Sospedra, J.; Huerta, J.; Matey Sanz, M.; BLE RSS Meaurements Database and Supporting Materials. Zenodo Repository. Available online: https://zenodo.org/record/1066041 (accessed on 21 December 2018).
- Paterna, V.C.; Augé, A.C.; Aspas, J.P.; Bullones, M.A.P. A bluetooth low energy indoor positioning system with channel diversity, weighted trilateration and kalman filtering. Sensors 2017, 17, 2927. [Google Scholar] [CrossRef] [PubMed]
- Muñoz-Organero, M.; Muñoz-Merino, P.J.; Delgado Kloos, C. Using bluetooth to implement a pervasive indoor positioning system with minimal requirements at the application level. Mob. Inf. Syst. 2012, 8, 73–82. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the Conference on Computer Communications, Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM 2000), Tel Aviv, Israel, 26–30 March 2000; IEEE: New York, NY, USA, 2000; Volume 2, pp. 775–784. [Google Scholar]
- IPIN 2017 Conference Web Site, 2017. Available online: http://www.ipin2017.org/ (accessed on 21 December 2018).
- Kriz, P.; Maly, F.; Kozel, T. Improving Indoor Localization Using Bluetooth Low Energy Beacons. Mob. Inf. Syst. 2016, 2016, 1–11. [Google Scholar] [CrossRef]
- Budina, J.; Klapka, O.; Kozel, T.; Zmitko, M. Method of iBeacon Optimal Distribution for Indoor Localization; Modeling and Using Context; Christiansen, H., Stojanovic, I., Papadopoulos, G.A., Eds.; Springer: Cham, Switzerland, 2015; pp. 105–117. [Google Scholar]
- Castillo-Cara, M.; Lovón-Melgarejo, J.; Bravo-Rocca, G.; Orozco-Barbosa, L.; García-Varea, I. An Analysis of Multiple Criteria and Setups for Bluetooth Smartphone-Based Indoor Localization Mechanism. J. Sens. 2017, 2017, 1–22. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geotec | Library | |
|---|---|---|
| number of beacons | 22 | 24 |
| number of samples | 2652 | 2100 |
| number of campaigns | 1 | 2 |
| smartphones | A5 | A5,BQ,S6 |
| involved subjects | 1 | 3 |
| consecutive collection samples | 13 | 6 |
| transmission powers (dBm) | −20,−12,−4 | −20 |
| area (m2) | 151.07 | 176.02 |
| area covered by tall obstacles (m2) | 8.70 | 68.73 |
| area covered by samples (m2) | 137.51 | 121.65 |
| area covered by beacons (m2) | 138.08 | 172.9 |
| MDMS (m) | 2.34 | 1.79 |
| MDMB (m) | 3.07 | 3.71 |
| Library (S6) | Library (A5) | Geotec (A5) | |
|---|---|---|---|
| Max detected RSS (dBm) | −52 | −33 | −44 |
| MDP70 (m) | 0.47 | 3.92 | 2.75 |
| MDHT (m) | 4.50 | 1.47 | 1.16 |
| Zone | p-Value | Beacon | |
|---|---|---|---|
| Geotec | −0.14 | 0.04 | 2 |
| Library | −0.14 | 0.12 | 18 |
| A5 | BQ | S6 | |
|---|---|---|---|
| Error(m)-All | 3.51 | 1.95 | 2.01 |
| Error(m)-K10 | 3.51 | 1.94 | 2.00 |
| Error(m)-KF10 | 2.63 | 1.88 | 1.83 |
| Ratio-KF10 | 0.44 | 0.82 | 0.83 |
| A5 | BQ | S6 | |
|---|---|---|---|
| Error (m) | 4.43 | 4.61 | 4.88 |
| Max number of coincident beacons | 4 | 12 | 11 |
| −0.80 | −0.95 | −0.93 | |
| p-value | 0.2 |
| Mean | Last | |||||||
|---|---|---|---|---|---|---|---|---|
| Library | Geotec | Library | Geotec | |||||
| Windows size | FP | WC | FP | WC | FP | WC | FP | WC |
| none | 4.46 | 3.46 | 4.16 | 3.44 | 4.46 | 3.46 | 4.16 | 3.44 |
| 2 | 3.77 | 2.58 | 3.91 | 2.69 | 3.85 | 2.56 | 3.93 | 2.69 |
| 3 | 3.43 | 2.32 | 3.49 | 2.59 | 3.41 | 2.35 | 3.52 | 2.49 |
| 4 | 2.95 | 2.29 | 3.38 | 2.61 | 3.03 | 2.31 | 3.47 | 2.45 |
| 5 | 2.83 | 2.28 | 3.34 | 2.48 | 2.87 | 2.30 | 3.55 | 2.37 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mendoza-Silva, G.M.; Matey-Sanz, M.; Torres-Sospedra, J.; Huerta, J. BLE RSS Measurements Dataset for Research on Accurate Indoor Positioning. Data 2019, 4, 12. https://doi.org/10.3390/data4010012
Mendoza-Silva GM, Matey-Sanz M, Torres-Sospedra J, Huerta J. BLE RSS Measurements Dataset for Research on Accurate Indoor Positioning. Data. 2019; 4(1):12. https://doi.org/10.3390/data4010012
Chicago/Turabian StyleMendoza-Silva, Germán Martín, Miguel Matey-Sanz, Joaquín Torres-Sospedra, and Joaquín Huerta. 2019. "BLE RSS Measurements Dataset for Research on Accurate Indoor Positioning" Data 4, no. 1: 12. https://doi.org/10.3390/data4010012
APA StyleMendoza-Silva, G. M., Matey-Sanz, M., Torres-Sospedra, J., & Huerta, J. (2019). BLE RSS Measurements Dataset for Research on Accurate Indoor Positioning. Data, 4(1), 12. https://doi.org/10.3390/data4010012