Experimental Force Data of a Restrained ROV under Waves and Current

 ,
,  , ,
, ,  ,
,  , , , ,
, , , ,  and
and 
Abstract
:1. Introduction
2. Experimental Set-Up
2.1. Remotely Operated Underwater Vehicle (ROV)
2.2. Frame and Obstacle
2.3. Instrumentation
2.4. Investigated Cases
3. Additional Analysis
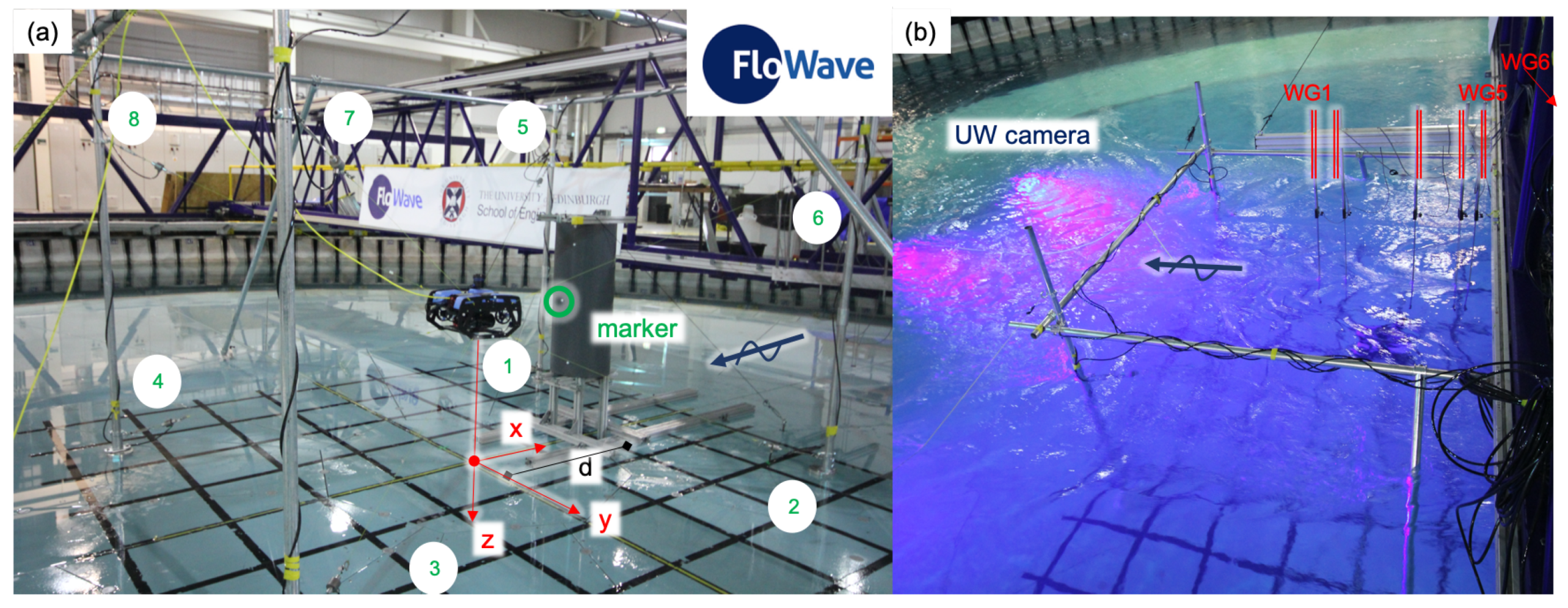
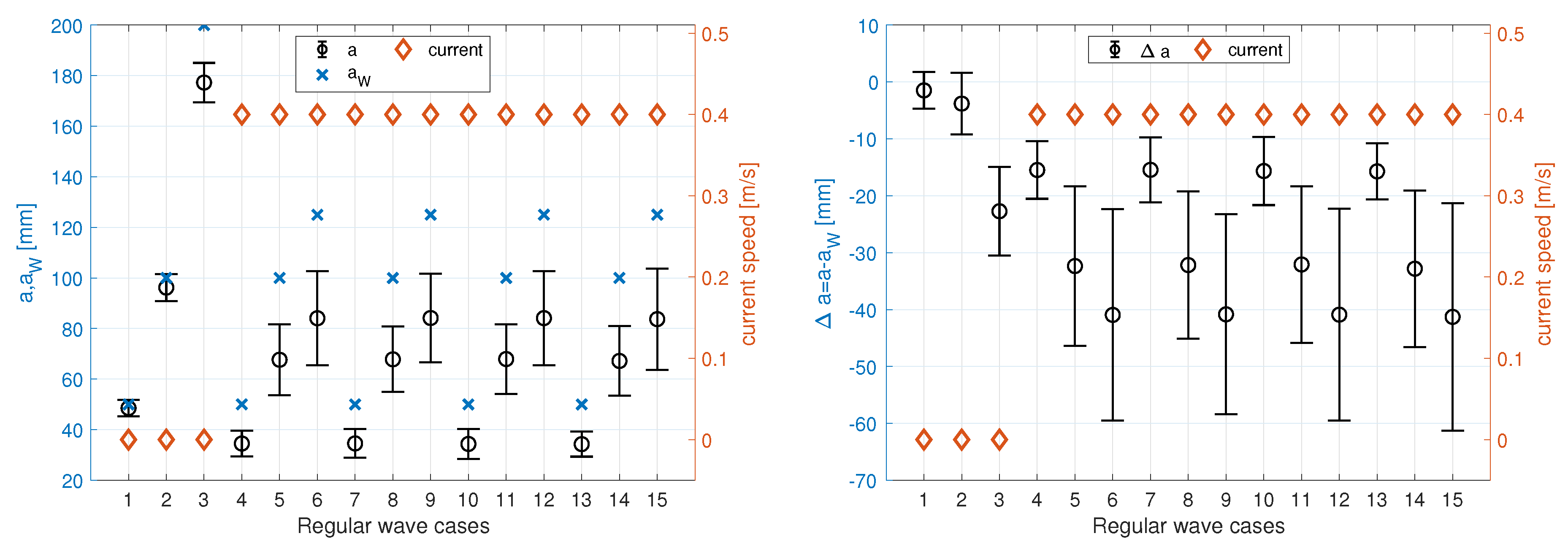
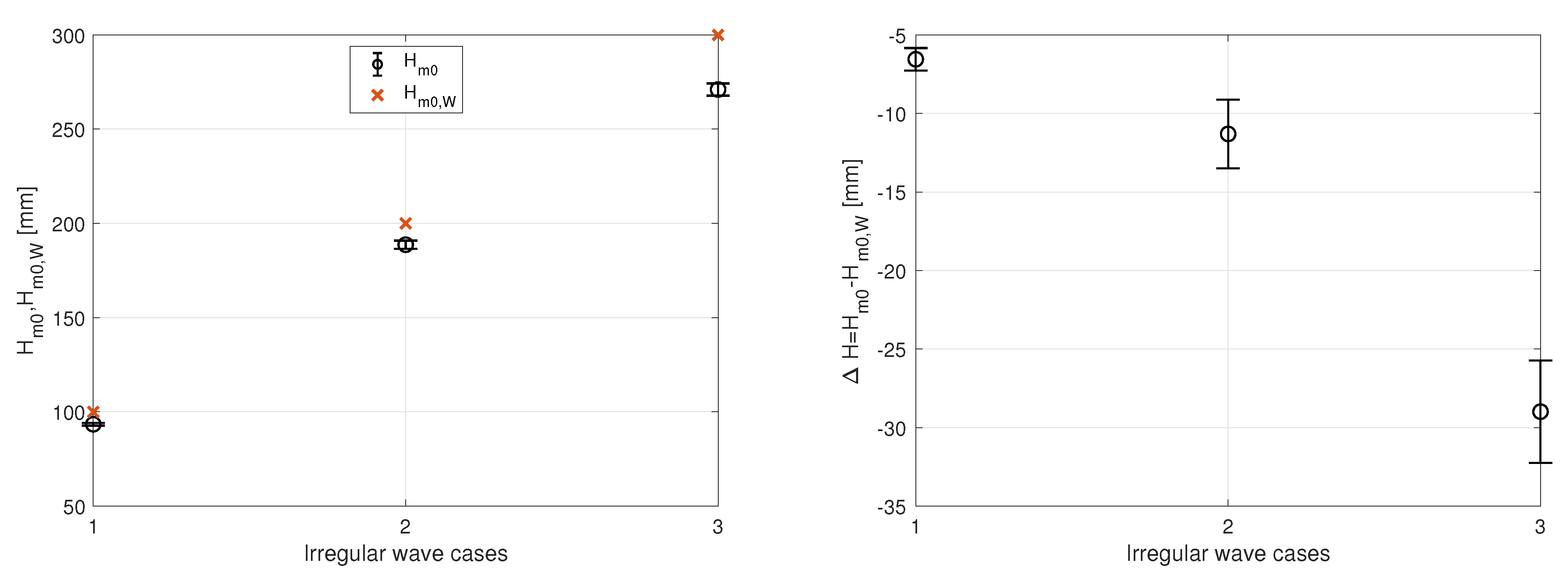
3.1. Wave Gauges
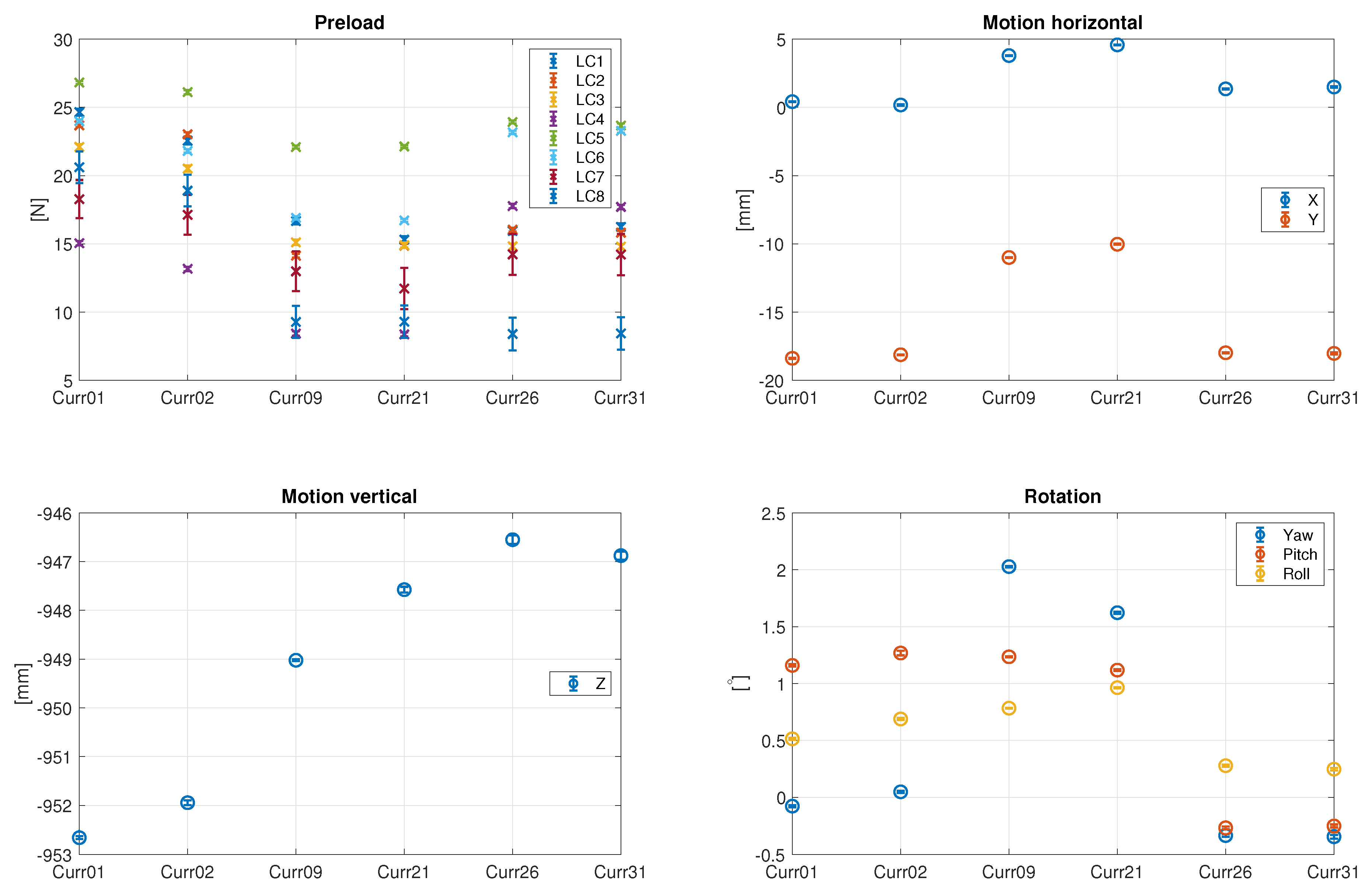
3.2. Load Cells
4. Dataset Description
| RD or PD_ [case ID] [run ID] _CaptureTime.txt |
| RD_ or PD_ [case ID] [run ID] _RepeatTime.txt (only for wave cases) |
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| a | = amplitude waves (mm) |
| = amplitude waves (mm) requested from the wave makers | |
| C | = correction value for the LC |
| d | = obstacle distance (m) |
| D | = diameter of the cylindrical obstacle (m) |
| f | = frequency wave (Hz) |
| = frequency wave (Hz) requested from the wave makers | |
| F | = measured force (N) |
| = force F split into the main direction (N) | |
| = moments around the main direction (Nm) | |
| = wave height irregular waves (mm) | |
| = wave height irregular waves (mm) requested from the wave makers | |
| i | = number of the LC |
| V | vector describing the working direction of the LC (FP-MP) |
| = components of V in the main direction | |
| x | = distance opposing the main wave direction (m) |
| X | = motion in x-direction (mm) |
| y | = distance orthogonal to the main wave direction (m) |
| Y | = motion in y-direction (mm) |
| z | = distance vertical direction (m) |
| Z | = motion in z-direction (mm) |
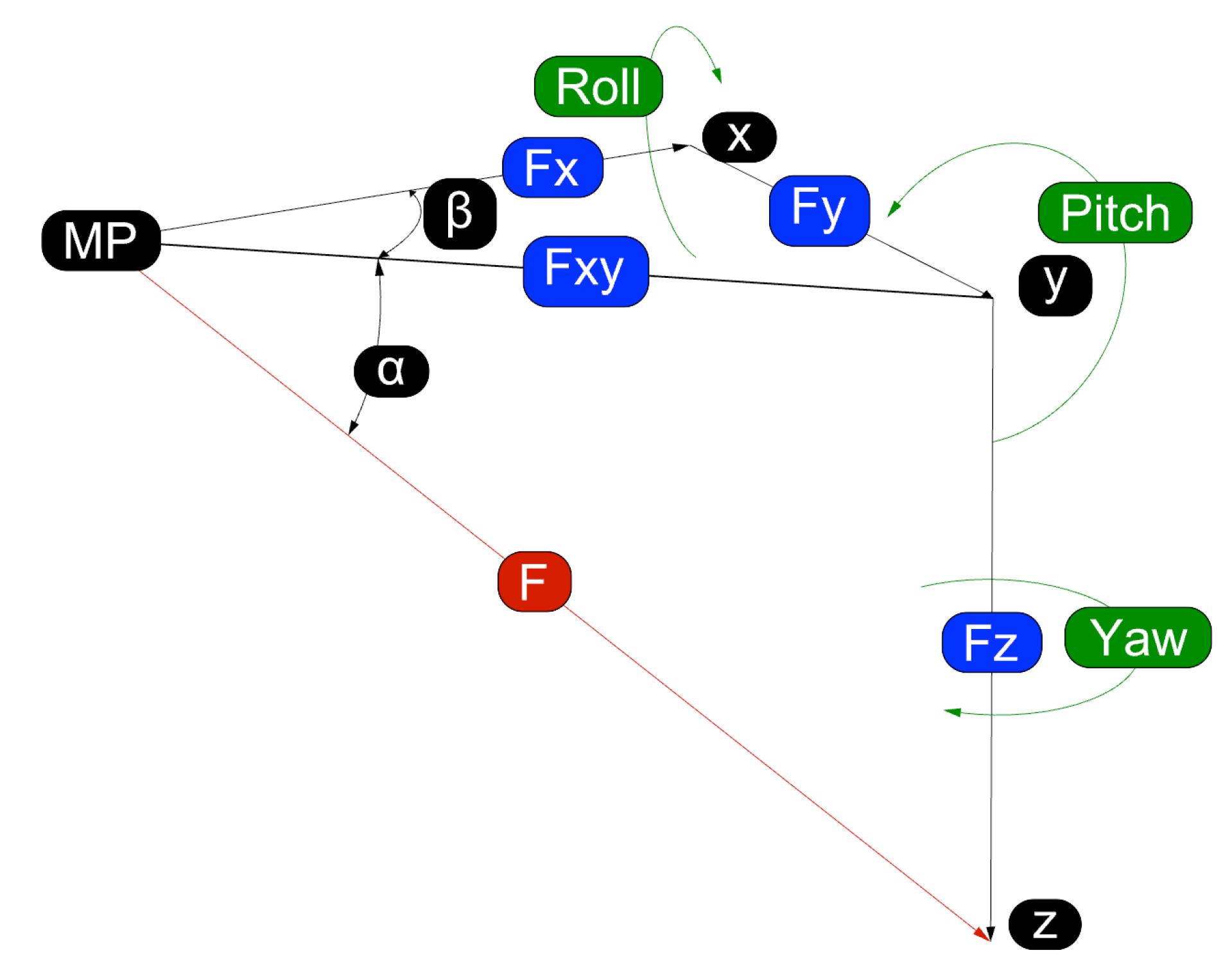
| = angle defined in Figure 6 | |
| CFD | Computational Fluid Dynamics |
| DoF | degree of freedom |
| FP | additional marker close to the frame |
| ID | identification |
| LC | load cells |
| MoCAP | motion capturing system |
| MP | mounting point on the ROV |
| PD | processed data |
| RC | rated capacity |
| RD | raw data |
| RPM | revolutions per minute |
| ROV | remotely operated (underwater) vehicle |
| WG | wave gauge |
References
- Hastie, H.; Lohan, K.; Chantler, M.; Robb, D.A.; Ramamoorthy, S.; Petrick, R.; Vijayakumar, S.; Lane, D. The ORCA Hub: Explainable Offshore Robotics through Intelligent Interfaces. In Proceedings of the 13th Annual ACM/IEEE International Conference on Human Robot Interaction, Chicago, IL, USA, 5–8 March 2018. [Google Scholar]
- Sayed, M.E.; Nemitz, M.P.; Aracri, S.; McConnell, A.C.; McKenzie, R.M.; Stokes, A.A. The Limpet: A ROS-Enabled Multi-Sensing Platform for the ORCA Hub. Sensors 2018, 18, 3487. [Google Scholar] [CrossRef] [Green Version]
- Gabl, R.; Davey, T.; Cao, Y.; Li, Q.; Li, B.; Walker, K.L.; Giorgio-Serchi, F.; Aracri, S.; Kiprakis, A.; Stokes, A.; et al. Hydrodynamic Loads on a Restrained ROV under Waves and Current. 2020; submitted. [Google Scholar]
- Gabl, R.; Davey, T.; Cao, Y.; Li, Q.; Li, B.; Walker, K.L.; Giorgio-Serchi, F.; Aracri, S.; Kiprakis, A.; Stokes, A.A.; et al. Dataset—Experimental Force Data of a Restrained ROV under Waves and Current; Edinburgh DataShare [Dataset]; University of Edinburgh: Edinburgh, UK, 2020. [Google Scholar] [CrossRef]
- Selvakumar, J.M.; Asokan, T. A Novel Approach to Measure under Water Vehicle Disturbance Force for Station Keeping Control. In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics, Rome, Italy, 28–31 July 2012; Volume 2, pp. 460–463. [Google Scholar]
- Wang, W.; Clark, C.M. Modeling and Simulation of the VideoRay Pro III Underwater Vehicle. In Proceedings of the OCEANS 2006—Asia Pacific, Singapore, 16–19 May 2006; pp. 1–7. [Google Scholar]
- Inoue, T.; Suzuki, H.; Shimamura, T.; Nakajima, K.; Shioji, G. Experimental research on horizontal rotation of ROV induced by external forces near sea surface. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–6. [Google Scholar]
- Eng, Y.H.; Lau, W.S.; Low, E.; Seet, G.; Chin, C.S. Estimation of the Hydrodynamics Coefficients of an ROV using Free Decay Pendulum Motion. Eng. Lett. 2008, 16, 326–331. [Google Scholar]
- Morrison, A.T.; Yoerger, D.R. Determination of the hydrodynamic parameters of an underwater vehicle during small scale, nonuniform, 1-dimensional translation. In Proceedings of the OCEANS ’93, Victoria, BC, Canada, 18–21 October 1993; Volume 2, pp. II277–II282. [Google Scholar]
- Lack, S.; Rentzow, E.; Jeinsch, T. Experimental Parameter Identification for an open-frame ROV: Comparison of towing tank tests and open water self-propelled tests. IFAC-PapersOnLine 2019, 52, 271–276. [Google Scholar] [CrossRef]
- Roy, P.D.; Ranjan, R. Variation of Wave Force on Submerged Object at Shallow Water: Fourier Series Technique. Aquatic Procedia 2015, 4, 95–102. [Google Scholar] [CrossRef]
- Roy, P.D.; Ghosh, S. Wave force on vertically submerged circular thin plate in shallow water. Ocean Eng. 2006, 33, 1935–1953. [Google Scholar] [CrossRef]
- Sakiyama, J.; Motoi, N. Position and Attitude Control Method Using Disturbance Observer for Station Keeping in Underwater Vehicle. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 5469–5474. [Google Scholar] [CrossRef]
- Willy, C.J. Attitude Control of an Underwater Vehicle Subjected to Waves. Master’s Thesis, MIT and Woods Hole Oceanographic Institution, Cambridge, MA, USA, 1994. [Google Scholar]
- Milgram, J.H. Strip theory for underwater vehicles in water of finite depth. J. Eng. Math. 2007, 58, 31–50. [Google Scholar] [CrossRef] [Green Version]
- Yang, R.; Clement, B.; Mansour, A.; Li, M.; Wu, N. Modeling of a Complex-Shaped Underwater Vehicle for Robust Control Scheme. J. Intell. Robot. Syst. 2015, 80, 491–506. [Google Scholar] [CrossRef]
- Singh, Y.; Bhattacharyya, S.K.; Idichandy, V.G. CFD approach to modelling, hydrodynamic analysis and motion characteristics of a laboratory underwater glider with experimental results. J. Ocean Eng. Sci. 2017, 2, 90–119. [Google Scholar] [CrossRef]
- Dukan, F.; Ludvigsen, M.; Sørensen, A.J. Dynamic positioning system for a small size ROV with experimental results. In Proceedings of the IEEE OCEANS 2011, Santander, Spain, 6–9 June 2011; pp. 1–10. [Google Scholar]
- Ingram, D.; Wallace, R.; Robinson, A.; Bryden, I. The Design and Commissioning of the First, Circular, Combined Current and Wave Test Basin. In Proceedings of the IEEE Oceans 2014 MTS/IEEE, Taipei, Taiwan, 7–10 April 2014. [Google Scholar]
- Draycott, S.; Sellar, B.; Davey, T.; Noble, D.R.; Venugopal, V.; Ingram, D. Capture and Simulation of the Ocean Environment for Offshore Renewable Energy. Renew. Sustain. Energy Rev. 2019, 104, 15–29. [Google Scholar] [CrossRef]
- Walker, K.L.; Stokes, A.A.; Kiprakis, A.; Giorgio-Serchi, F. Impact of Thruster Dynamics on the Feasibility of ROV Station Keeping in Waves. In Proceedings of the OCEANS 2020 MTS/IEEE, Singapore, 5–30 October 2020. in press. [Google Scholar]
- Walker, K.L.; Stokes, A.A.; Kiprakis, A.; Giorgio-Serchi, F. Investigating PID Control for Station Keeping ROVs. In Proceedings of the UKRAS20 Conference: “Robots into the real world”, Lincoln, UK, 17 April 2020; pp. 51–53. [Google Scholar]
- Blue Robotics, “BlueROV2” Datasheet, June 2016 [Revised Jan. 2019]. Available online: https://bluerobotics.com/wp-content/uploads/2020/02/br_bluerov2_datasheet_rev6.pdf (accessed on 2 June 2020).
- NVIDIA Jetson Nano Developer Kit. Available online: https://www.nvidia.com/en-gb/autonomous-machines/embedded-systems/jetson-nano/ (accessed on 2 June 2020).
- Blue Robtotics, Ping360 Scanning Imaging Sonar. Available online: https://bluerobotics.com/store/sensors-sonars-cameras/sonar/ping360-sonar-r1-rp/ (accessed on 2 June 2020).
- APPLIED MEASUREMENTS Ltd. Submersible Load Cell–DDEN. Available online: https://appmeas.co.uk/products/load-cells-force-sensors/in-line-submersible-load-cell-dden/ (accessed on 2 June 2020).
- MARINET (2012). Work Package 2: Standards and Best Practice—D2.1 Wave Instrumentation Database. Revision: 05. Available online: http://www.marinet2.eu/wp-content/uploads/2017/04/D2.01-Wave-Instrumentation-Database.pdf (accessed on 2 June 2020).
- Gabl, R.; Steynor, J.; Forehand, D.I.M.; Davey, T.; Bruce, T.; Ingram, D.M. Capturing the Motion of the Free Surface of a Fluid Stored within a Floating Structure. Water 2019, 11, 50. [Google Scholar] [CrossRef] [Green Version]
- Noble, D.; Davey, T.; Smith, H.; Panagiotis, K.; Robinson, A.; Bruce, T. Spatial variation of currents generated in the FloWave Ocean Energy Research Facility. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC2015), Nantes, France, 6–11 September 2015. [Google Scholar]
- Gabl, R.; Davey, T.; Nixon, E.; Steynor, J.; Ingram, D.M. Experimental Data of a Floating Cylinder in a Wave Tank: Comparison Solid and Water Ballast. Data 2019, 4, 146. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Direction | MP1 | MP2 | MP3 | MP4 | MP5 | MP6 | MP7 | MP8 |
|---|---|---|---|---|---|---|---|---|
| 129.6 | 129.6 | −130.4 | −130.4 | 129.6 | 129.6 | −130.4 | −130.4 | |
| −167.8 | 167.8 | 167.8 | −167.8 | −167.8 | 167.8 | 167.8 | −167.8 | |
| 112.0 | 112.0 | 112.0 | 112.0 | −80.0 | −80.0 | −80.0 | −80.0 |
| WGNr | WG1 | WG2 | ROV Centre | WG3 | WG4 | WG5 | WG6 |
|---|---|---|---|---|---|---|---|
| x [m] | −0.495 | −0.313 | 0.000 | 0.141 | 0.414 | 0.505 | 2.105 |
| Repeat | Run | Capture | Amp | Freq | Wave | Current | Current | Obstacle | ||
|---|---|---|---|---|---|---|---|---|---|---|
| Name | Time | Time | Time | Dir. | Speed | Dir. | RPM | Distance d | ||
| [sec] | [sec] | [sec] | [m] | [Hz] | [°] | [m/s] | [°] | [−] | [m] | |
| Reg01 | 128 | 160 | 170 | 0.05 | 0.5 | 180 | 0 | 0 | 0 | - |
| Reg02 | 128 | 160 | 170 | 0.1 | 0.5 | 180 | 0 | 0 | 0 | - |
| Reg03 | 128 | 160 | 170 | 0.2 | 0.5 | 180 | 0 | 0 | 0 | - |
| Reg04 | 512 | 550 | 560 | 0.05 | 0.5 | 180 | 0.4 | 180 | 49 | - |
| Reg05 | 512 | 550 | 560 | 0.1 | 0.5 | 180 | 0.4 | 180 | 49 | - |
| Reg06 | 512 | 550 | 560 | 0.125 | 0.5 | 180 | 0.4 | 180 | 49 | - |
| Reg07 | 256 | 300 | 300 | 0.05 | 0.5 | 180 | 0.4 | 180 | 49 | 1.7 |
| Reg08 | 256 | 300 | 300 | 0.1 | 0.5 | 180 | 0.4 | 180 | 49 | 1.7 |
| Reg09 | 256 | 300 | 300 | 0.125 | 0.5 | 180 | 0.4 | 180 | 49 | 1.7 |
| Reg10 | 256 | 300 | 300 | 0.05 | 0.5 | 180 | 0.4 | 180 | 49 | 1.3 |
| Reg11 | 256 | 300 | 300 | 0.1 | 0.5 | 180 | 0.4 | 180 | 49 | 1.3 |
| Reg12 | 256 | 300 | 300 | 0.125 | 0.5 | 180 | 0.4 | 180 | 49 | 1.3 |
| Reg13 | 256 | 300 | 300 | 0.05 | 0.5 | 180 | 0.4 | 180 | 49 | 0.9 |
| Reg14 | 256 | 300 | 300 | 0.1 | 0.5 | 180 | 0.4 | 180 | 49 | 0.9 |
| Reg15 | 256 | 300 | 300 | 0.125 | 0.5 | 180 | 0.4 | 180 | 49 | 0.9 |
| Repeat | Run | Capture | Wave | Obstacle | |||||
|---|---|---|---|---|---|---|---|---|---|
| Name | Time | Time | Time | Period | Dir. | Gamma | RPM | Distance d | |
| [sec] | [sec] | [sec] | [m] | [sec] | [°] | [−] | [−] | [m] | |
| Irr01 | 512 | 550 | 560 | 0.1 | 2 | 180 | 3.3 | 0 | - |
| Irr02 | 512 | 550 | 560 | 0.2 | 2 | 180 | 3.3 | 0 | - |
| Irr03 | 512 | 550 | 560 | 0.3 | 2 | 180 | 3.3 | 0 | - |
| Number | Capture Time [sec] | Command | Number | Capture Time [sec] | Command | |
|---|---|---|---|---|---|---|
| Mot01 | 64 | still | Mot10 | 64 | forward transient | |
| Mot02 | 64 | forward | Mot11 | 64 | backward transient | |
| Mot03 | 64 | backward | Mot12 | 64 | left transient | |
| Mot04 | 64 | left | Mot13 | 64 | right transient | |
| Mot05 | 64 | right | Mot14 | 64 | upwards transient | |
| Mot06 | 64 | upwards | Mot15 | 64 | downwards transient | |
| Mot07 | 64 | downwards | Mot16 | 64 | yaw left transient | |
| Mot08 | 64 | yaw left | Mot17 | 64 | yaw right transient | |
| Mot09 | 64 | yaw right | Mot18 | 64 | still |
| Name | Capture Time | Current Speed | Current Direction | RPM | Obstacle Distance d |
|---|---|---|---|---|---|
| [sec] | [m/s] | [°] | [−] | [m] | |
| Curr01 | 64 | 0 | 0 | 0 | - |
| Curr02 | 64 | 0 | 0 | 0 | - |
| Curr03 | 512 | 0.2 | 180 | 25 | - |
| Curr04 | 512 | 0.4 | 180 | 49 | - |
| Curr05 | 512 | 0.6 | 180 | 73 | - |
| Curr06 | 512 | 0.8 | 180 | 96 | - |
| Curr07 | 512 | 1 | 180 | 120 | - |
| Curr08 | 512 | 1 | 180 | 120 | - |
| Curr09 | 170 | 0 | 0 | 0 | - |
| Curr10 | 560 | 0.4 | 180 | 49 | - |
| Curr11 | 512 | 0.2 | 90 | 25 | - |
| Curr12 | 512 | 0.4 | 90 | 49 | - |
| Curr13 | 512 | 0.6 | 90 | 73 | - |
| Curr14 | 512 | 0.2 | -90 | 25 | - |
| Curr15 | 512 | 0.4 | -90 | 49 | - |
| Curr16 | 512 | 0.6 | -90 | 73 | - |
| Curr17 | 512 | 0.2 | 0 | 25 | - |
| Curr18 | 512 | 0.4 | 0 | 49 | - |
| Curr19 | 512 | 0.6 | 0 | 73 | - |
| Curr20 | 512 | 0.8 | 0 | 96 | - |
| Curr21 | 300 | 0 | 0 | 0 | 1.7 |
| Curr22 | 300 | 0.2 | 0 | 25 | 1.7 |
| Curr23 | 300 | 0.2 | 180 | 25 | 1.7 |
| Curr24 | 300 | 0.4 | 180 | 49 | 1.7 |
| Curr25 | 300 | 0.6 | 180 | 73 | 1.7 |
| Curr26 | 300 | 0 | 0 | 0 | 1.3 |
| Curr27 | 300 | 0.2 | 180 | 25 | 1.3 |
| Curr28 | 300 | 0.4 | 180 | 49 | 1.3 |
| Curr29 | 300 | 0.6 | 180 | 73 | 1.3 |
| Curr30 | 300 | 0.8 | 180 | 96 | 1.3 |
| Curr31 | 300 | 0 | 0 | 0 | 0.9 |
| Curr32 | 300 | 0.2 | 180 | 25 | 0.9 |
| Curr33 | 300 | 0.4 | 180 | 49 | 0.9 |
| Curr34 | 300 | 0.6 | 180 | 73 | 0.9 |
| Curr35 | 300 | 0.8 | 180 | 96 | 0.9 |
| Number | Amp | Amp a | Number | Amp | Amp a | |||
|---|---|---|---|---|---|---|---|---|
| [mm] | [mm] | [%] | [mm] | [mm] | [%] | |||
| Reg01 | 50 | 48.52 | 97.0% | Reg11 | 100 | 67.92 | 67.9% | |
| Reg02 | 100 | 96.19 | 96.2% | Reg12 | 125 | 84.11 | 67.3% | |
| Reg03 | 200 | 177.28 | 88.6% | Reg13 | 50 | 34.29 | 68.6% | |
| Reg04 | 50 | 34.52 | 69.0% | Reg14 | 100 | 67.18 | 67.2% | |
| Reg05 | 100 | 67.65 | 67.7% | Reg15 | 125 | 83.71 | 67.0% | |
| Reg06 | 125 | 84.06 | 67.3% | |||||
| Reg07 | 50 | 34.56 | 69.1% | Number | ||||
| Reg08 | 100 | 67.82 | 67.8% | Irr01 | 100 | 93.45 | 93.4% | |
| Reg09 | 125 | 84.16 | 67.3% | Irr02 | 200 | 188.69 | 94.3% | |
| Reg10 | 50 | 34.35 | 68.7% | Irr03 | 300 | 271.01 | 90.3% |
| Number | C | Number | C | Number | C | Number | C | Number | C | Number | C |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Curr01 | 1 | Curr13 | 3 | Curr25 | 4 | Mot01 | 1 | Mot13 | 2 | Reg07 | 4 |
| Curr02 | 2 | Curr14 | 3 | Curr26 | 5 | Mot02 | 1 | Mot14 | 2 | Reg08 | 4 |
| Curr03 | 2 | Curr15 | 3 | Curr27 | 5 | Mot03 | 1 | Mot15 | 2 | Reg09 | 4 |
| Curr04 | 2 | Curr16 | 3 | Curr28 | 5 | Mot04 | 1 | Mot16 | 2 | Reg10 | 5 |
| Curr05 | 2 | Curr17 | 3 | Curr29 | 5 | Mot05 | 1 | Mot17 | 2 | Reg11 | 5 |
| Curr06 | 2 | Curr18 | 3 | Curr30 | 5 | Mot06 | 1 | Mot18 | 2 | Reg12 | 5 |
| Curr07 | 2 | Curr19 | 3 | Curr31 | 6 | Mot07 | 1 | Reg01 | 3 | Reg13 | 6 |
| Curr08 | 2 | Curr20 | 3 | Curr32 | 6 | Mot08 | 1 | Reg02 | 3 | Reg14 | 6 |
| Curr09 | 3 | Curr21 | 4 | Curr33 | 6 | Mot09 | 1 | Reg03 | 3 | Reg15 | 6 |
| Curr10 | 3 | Curr22 | 4 | Curr34 | 6 | Mot10 | 2 | Reg04 | 3 | Irr01 | 3 |
| Curr11 | 3 | Curr23 | 4 | Curr35 | 6 | Mot11 | 2 | Reg05 | 3 | Irr02 | 3 |
| Curr12 | 3 | Curr24 | 4 | Mot12 | 2 | Reg06 | 3 | Irr03 | 3 |
| Name | Time | X | Y | Z | yaw | pitch | roll | ⋯ | |
|---|---|---|---|---|---|---|---|---|---|
| Unit | [sec] | [mm] | [mm] | [mm] | [°] | [°] | [°] | ⋯ | |
| Column | 1 | 2 | 3 | 4 | 5 | 6 | 7 | ⋯ | |
| LC1 | LC2 | LC3 | LC4 | LC5 | LC6 | LC7 | LC8 | ⋯ | |
| [N] | [N] | [N] | [N] | [N] | [N] | [N] | [N] | ⋯ | |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | ⋯ | |
| ⋯ | ⋯ | ||||||||
| [mm] | [mm] | [mm] | ⋯ | [mm] | [mm] | [mm] | ⋯ | ||
| 16 | 17 | 18 | ⋯ | 37 | 38 | 39 | ⋯ | ||
| WG1 | WG2 | WG3 | WG4 | WG5 | WG6 | ||||
| [mm] | [mm] | [mm] | [mm] | [mm] | [mm] | ||||
| 40 | 41 | 42 | 43 | 44 | 45 |
| Name | time | X | Y | Z | yaw | pitch | roll | ⋯ | ||
|---|---|---|---|---|---|---|---|---|---|---|
| Unit | [sec] | [mm] | [mm] | [mm] | [°] | [°] | [°] | ⋯ | ||
| Column | 1 | 2 | 3 | 4 | 5 | 6 | 7 | ⋯ | ||
| ⋯ | ⋯ | ⋯ | ⋯ | |||||||
| [N] | ⋯ | [N] | [N] | ⋯ | [N] | [N] | ⋯ | [N] | ⋯ | |
| 8 | ⋯ | 15 | 16 | ⋯ | 23 | 24 | ⋯ | 31 | ⋯ | |
| WG1 | WG2 | WG3 | WG4 | WG5 | WG6 | |||||
| [mm] | [mm] | [mm] | [mm] | [mm] | [mm] | |||||
| 32 | 33 | 34 | 35 | 36 | 37 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gabl, R.; Davey, T.; Cao, Y.; Li, Q.; Li, B.; Walker, K.L.; Giorgio-Serchi, F.; Aracri, S.; Kiprakis, A.; Stokes, A.A.; et al. Experimental Force Data of a Restrained ROV under Waves and Current. Data 2020, 5, 57. https://doi.org/10.3390/data5030057
Gabl R, Davey T, Cao Y, Li Q, Li B, Walker KL, Giorgio-Serchi F, Aracri S, Kiprakis A, Stokes AA, et al. Experimental Force Data of a Restrained ROV under Waves and Current. Data. 2020; 5(3):57. https://doi.org/10.3390/data5030057
Chicago/Turabian StyleGabl, Roman, Thomas Davey, Yu Cao, Qian Li, Boyang Li, Kyle L. Walker, Francesco Giorgio-Serchi, Simona Aracri, Aristides Kiprakis, Adam A. Stokes, and et al. 2020. "Experimental Force Data of a Restrained ROV under Waves and Current" Data 5, no. 3: 57. https://doi.org/10.3390/data5030057
APA StyleGabl, R., Davey, T., Cao, Y., Li, Q., Li, B., Walker, K. L., Giorgio-Serchi, F., Aracri, S., Kiprakis, A., Stokes, A. A., & Ingram, D. M. (2020). Experimental Force Data of a Restrained ROV under Waves and Current. Data, 5(3), 57. https://doi.org/10.3390/data5030057