Multi-Slot BLE Raw Database for Accurate Positioning in Mixed Indoor/Outdoor Environments

 ,
, 

Abstract
:1. Introduction
2. Related Works
- Active developments are defined as those in which the user carries the receiver. On the contrary, in passive systems the user carries a transmitter that is detected by the static receivers.
- There are basically two ways of storing the data: raw and fingerprinting. Raw measurements correspond to the individual measurements of each transmitter-receiver pair in a specific time. Fingerprint vectors contain the measurements of all available transmitters in a time window. The fingerprint representation is less valuable as it looses some valuable information. e.g., if the same transmitter has been detected multiple times in the window, only one processed value (average, median, maximum or latest) is stored assigning just one timestamp to the full fingerprint vector.
- Different works have different labels for the positions, x-y coordinates on a local reference system, room or zone ID and cell ID. As an exception, only in one work position information is presented as the distance between the transmitter and the receiver. In those databases where no deployment area is given this area has been estimated using the planes and figures attached to the database itself or the related academic paper.
- Some works repeat the same experiment with different transmission configurations. In Table 1 these are presented as different subsets of the same database. This consideration is not taken for those works that use more than one receiver because training and test can be done with different devices.
- the number of Reference Points (RP) is the number of sample points with a position label and an RSSI associated with it. The number of samples is the amount of independent units of data presented by a database regardless the format.
- BLE beacons parameters are the transmission power, expressed in decibel-milliwatts (dBm) and the frequency, expressed as hertz (Hz). Some values can be found in the dataset descriptor or the related academic paper; while others are calculated directly from the databases themselves.
- The collection procedure can be done statically, going through all the RP and taking measurements only when the user is over them or while moving through a path. This is indicated in the table in the collection procedure section. Databases that include both are indicated as partial in the table. Usually, for fingerprinting applications the training set is collected statically and the test dynamically.
- The transmission power of the beacons is expressed in decibel-milliwatts (dBm) which is the ratio in decibels (dB) with reference to one milliwatt (mW).
3. Setup and Measurement Procedure
4. The BLE RSSI Database
5. Analysis on the Datasets and Baselines
6. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Chon, J.; Cha, H. LifeMap: A Smartphone-Based Context Provider for Location-Based Services. IEEE Pervasive Comput. 2011, 10, 58–67. [Google Scholar] [CrossRef]
- Zhu, N.; Marais, J.; Bétaille, D.; Berbineau, M. GNSS Position Integrity in Urban Environments: A Review of Literature. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2762–2778. [Google Scholar] [CrossRef] [Green Version]
- Lejba, P.; Nawrocki, J.; Lemanski, D.; Nogas, P.; Dunst, P. Precise Point Positioning technique for short and long baselines time transfer. In Proceedings of the Joint European Frequency and Time Forum International Frequency Control Symposium (EFTF/IFC), Prague, Czech Republic, 21–25 July 2013; pp. 815–818. [Google Scholar]
- Puricer, P.; Kovar, P. Technical Limitations of GNSS Receivers in Indoor Positioning. In Proceedings of the 17th International Conference Radioelektronika, Brno, Czech Republic, 24–25 April 2007; pp. 1–5. [Google Scholar]
- Roberts, T. We Spend 90% of Our Time Indoors. Says Who? 2016. Available online: https://www.buildinggreen.com/blog/we-spend-90-our-time-indoors-says-who (accessed on 9 July 2020).
- Ureña, J.; Hernández, A.; García, J.J.; Villadangos, J.M.; Carmen Pérez, M.; Gualda, D.; Álvarez, F.J.; Aguilera, T. Acoustic Local Positioning With Encoded Emission Beacons. Proc. IEEE 2018, 106, 1042–1062. [Google Scholar] [CrossRef]
- Latif, S.; Tariq, R.; Haq, W.; Hashmi, U. INDOOR POSITIONING SYSTEM using ultrasonics. Proceedings of 9th International Bhurban Conference on Applied Sciences Technology (IBCAST), Islamabad, Pakistan, 9–12 January 2012; pp. 440–444. [Google Scholar]
- Zhuang, Y.; Hua, L.; Qi, L.; Yang, J.; Cao, P.; Cao, Y.; Wu, Y.; Thompson, J.; Haas, H. A Survey of Positioning Systems Using Visible LED Lights. IEEE Commun. Surv. Tutor. 2018, 20, 1963–1988. [Google Scholar] [CrossRef] [Green Version]
- Mainetti, L.; Patrono, L.; Sergi, I. A survey on indoor positioning systems. In Proceedings of the 22nd International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 17–19 September 2014; pp. 111–120. [Google Scholar]
- Cheng, Y. Using ZigBee and Room-Based Location Technology to Constructing an Indoor Location-Based Service Platform. Proceedings of tha Fifth International Conference on Intelligent Information Hiding and Multimedia Signal Processing, Kyoto, Japan, 12–14 September 2009; pp. 803–806. [Google Scholar]
- He, S.; Chan, S.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Alletto, S.; Cucchiara, R.; Del Fiore, G.; Mainetti, L.; Mighali, V.; Patrono, L.; Serra, G. An Indoor Location-Aware System for an IoT-Based Smart Museum. IEEE Internet Things J. 2016, 3, 244–253. [Google Scholar] [CrossRef]
- Jiménez Ruiz, A.R.; Seco Granja, F. Comparing Ubisense, BeSpoon, and DecaWave UWB Location Systems: Indoor Performance Analysis. IEEE Trans. Instrum. Meas. 2017, 66, 2106–2117. [Google Scholar] [CrossRef]
- Use of Bluetooth Beacon Technology in Smart Airport. Available online: https://www.amarinfotech.com/use-of-bluetooth-beacon-technology-in-smart-airport.html (accessed on 9 July 2020).
- Sadowski, S.; Spachos, P. RSSI-Based Indoor Localization With the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Montoliu, R.; Trilles, S.; Belmonte, O.; Huerta, J. Comprehensive analysis of distance and similarity measures for Wi-Fi fingerprinting indoor positioning systems. Expert Syst. Appl. 2015, 42, 9263–9278. [Google Scholar] [CrossRef]
- Android Pie’s Throttling of WiFi Scanning is Crippling Some Network Tools. 2019. Available online: https://www.xda-developers.com/android-pie-throttling-wi-fi-scans-crippling-apps (accessed on 9 July 2020).
- Spachos, P.; Plataniotis, K.N. BLE Beacons for Indoor Positioning at an Interactive IoT-Based Smart Museum. IEEE Syst. J. 2020, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Gutíerrez, J.D.; Aranda, F.J.; Aguilera, T.; Álvarez, F.J. LIMUS: Exploration of Technological Prototypes for Location-Based Services in Museums. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Pisa, Italy, 30 September–3 November 2019. [Google Scholar]
- Jiménez, A.R.; Seco, F. Finding objects using UWB or BLE localization technology: A museum-like use case. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Laoudias, C.; Piché, R.; Panayiotou, C.G. Device signal strength self-calibration using histograms. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–8. [Google Scholar]
- Mendoza-Silva, G.; Richter, P.; Torres-Sospedra, J.; Lohan, E.; Huerta, J. Long-Term WiFi Fingerprinting Dataset for Research on Robust Indoor Positioning. Data 2018, 3, 3. [Google Scholar] [CrossRef] [Green Version]
- Mendoza-Silva, G.; Matey-Sanz, M.; Torres-Sospedra, J.; Huerta, J. BLE RSS Measurements Dataset for Research on Accurate Indoor Positioning. Data 2019, 4, 12. [Google Scholar] [CrossRef] [Green Version]
- Mendoza-Silva, G.M.; Torres-Sospedra, J.; Huerta, J.; Matey Sanz, M. BLE RSS Meaurements Database and Supporting Materials. Zenodo Repository. 2018. Available online: https://zenodo.org/record/1066041 (accessed on 9 July 2020). [CrossRef]
- Tóth, Z.; Tamás, J. Miskolc IIS hybrid IPS: Dataset for hybrid indoor positioning. In Proceedings of the 26th International Conference Radioelektronika (RADIOELEKTRONIKA), Kosice, Slovakia, 19–20 April 2016; pp. 408–412. [Google Scholar]
- Tóth, Z. ILONA: Indoor Localization and Navigation System. J. Locat. Based Serv. 2016, 10, 285–302. [Google Scholar] [CrossRef]
- Iqbal, Z.; Luo, D.; Henry, P.; Kazemifar, S.; Rozario, T.; Yan, Y.; Westover, K.; Lu, W.; Nguyen, D.; Long, T.; et al. Accurate real time localization tracking in a clinical environment using Bluetooth Low Energy and deep learning. PLoS ONE 2018, 13, e0205392. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- zoball. zoball/BLE-Tracking-with-Deep-Learning. 2020. Available online: https://github.com/zoball/BLE-Tracking-with-Deep-Learning (accessed on 9 July 2020).
- Byrne, D.; Kozlowski, M. Residential Wearable RSSI and Accelerometer Measurements with Detailed Annotations. Sci. Data 2019. [Google Scholar] [CrossRef] [PubMed]
- Residential Wearable RSSI and Accelerometer Measurements with Detailed Annotations 2018. Available online: https://figshare.com/articles/Residential_Wearable_RSSI_and_Accelerometer_Measurements_with_Detailed_Annotations/6051794 (accessed on 9 July 2020). [CrossRef]
- Sikeridis, D.; Papapanagiotou, I.; Devetsikiotis, M. BLEBeacon: A Real-Subject Trial Dataset from Mobile Bluetooth Low Energy Beacons. arXiv 2018, arXiv:1802.08782. [Google Scholar]
- Sikeridis, D.; Papapanagiotou, I.; Devetsikiotis, M. CRAWDAD Dataset Unm/Blebeacon (v.2019-03-12). CRAWDAD Wireless Network Data Archive. 2019. Available online: https://crawdad.org/unm/blebeacon/ (accessed on 9 July 2020).
- Sadowski, S.; Spachos, P. P. Spachos/RSSI-Dataset. 2020. Available online: https://github.com/pspachos/RSSI-Dataset (accessed on 9 July 2020).
- Mohammadi, M.; Al-Fuqaha, A.; Guizani, M.; Oh, J. Semisupervised Deep Reinforcement Learning in Support of IoT and Smart City Services. IEEE Internet Things J. 2018, 5, 624–635. [Google Scholar] [CrossRef] [Green Version]
- Mohammadi, M.; Al-Fuqaha, A. BLE RSSI Dataset for Indoor localization and Navigation Data Set. UCI Machine Learning Repository 2018. Available online: https://archive.ics.uci.edu/ml/datasets/BLE+RSSI+Dataset+for+Indoor+localization+and+Navigation (accessed on 9 July 2020).
- Baronti, P.; Barsocchi, P.; Chessa, S.; Mavilia, F.; Palumbo, F. Indoor Bluetooth Low Energy Dataset for Localization, Tracking, Occupancy, and Social Interaction. Sensors 2018, 18, 4462. [Google Scholar] [CrossRef] [Green Version]
- Baronti, P.; Barsocchi, P.; Chessa, S.; Mavilia, F.; Palumbo, F. Indoor Bluetooth Low Energy Datasetfor Localization, Tracking, Occupancy, and Social Interaction. 2018. Available online: http://wnlab.isti.cnr.it/_media/dataset.zip (accessed on 9 July 2020).
- Series 10 Beacon. Available online: https://store.gimbal.com/collections/beacons/products/s10 (accessed on 9 July 2020).
- RadBeacon Dot (Configurable). Available online: https://store.radiusnetworks.com/products/radbeacon-dot (accessed on 9 July 2020).
- BLED112 - Silicon Labs. Available online: https://www.silabs.com/wireless/bluetooth/bluegiga-low-energy-legacy-modules/device.bled112 (accessed on 9 July 2020).
- iBKS Plus · Accent Systems. Available online: https://accent-systems.com/product/ibks-plus/ (accessed on 24 July 2020).
- nRF51822 - Nordic Semiconductor. Available online: https://www.nordicsemi.com/en/Products/Low%20power%20short-range%20wireless/nRF51822 (accessed on 24 July 2020).
- Aranda, F.J.; Parralejo, F.; Álvarez, F.J.; Torres-Sospedra, J. Multi-Slot BLE Raw Database for Accurate Positioning in Mixed Indoor/Outdoor Environments. 2020. Available online: https://zenodo.org/record/3927588 (accessed on 29 July 2020).
- Kushki, A.; Plataniotis, K.N.; Venetsanopoulos, A.N. Kernel-Based Positioning in Wireless Local Area Networks. IEEE Trans. Mob. Comput. 2007, 6, 689–705. [Google Scholar] [CrossRef] [Green Version]
- Zhao, F.; Huang, T.; Wang, D. A Probabilistic Approach for WiFi Fingerprint Localization in Severely Dynamic Indoor Environments. IEEE Access 2019, 7, 116348–116357. [Google Scholar] [CrossRef]
- Altini, M.; Brunelli, D.; Farella, E.; Benini, L. Bluetooth indoor localization with multiple neural networks. In Proceedings of the IEEE 5th International Symposium on Wireless Pervasive Computing, Modena, Italy, 5–7 May 2010; pp. 295–300. [Google Scholar] [CrossRef]
- Kasantikul, K.; Xiu, C.; Yang, D.; Yang, M. An enhanced technique for indoor navigation system based on WIFI-RSSI. In Proceedings of the Seventh International Conference on Ubiquitous and Future Networks, Sapporo, Japan, 7–10 July 2015; pp. 513–518. [Google Scholar] [CrossRef]
- Pan, J.J.; Kwok, J.T.; Yang, Q.; Chen, Y. Multidimensional Vector Regression for Accurate and Low-Cost Location Estimation in Pervasive Computing. IEEE Trans. Knowl. Data Eng. 2006, 18, 1181–1193. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.-L.; Fu, L.-C.; Lian, F.-L. WLAN location determination in e-home via support vector classification. In Proceedings of the IEEE International Conference on Networking, Sensing and Control, Taipei, Taiwan, 21–23 March 2004; Volume 2, pp. 1026–1031. [Google Scholar] [CrossRef]
- Honkavirta, V.; Perala, T.; Ali-Loytty, S.; Piche, R. A comparative survey of WLAN location fingerprinting methods. In Proceedings of the 6th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 19 March 2009; pp. 243–251. [Google Scholar] [CrossRef] [Green Version]
- Yim, J. Introducing a decision tree-based indoor positioning technique. Expert Syst. Appl. 2008, 34, 1296–1302. [Google Scholar] [CrossRef]
- Badawy, O.M.; Hasan, M.A.B. Decision Tree Approach to Estimate User Location in WLAN Based on Location Fingerprinting. In Proceedings of the National Radio Science Conference, Cairo, Egipt, 13–15 March 2007; pp. 1–10. [Google Scholar] [CrossRef]
- Cha, S.H. Comprehensive Survey on Distance/Similarity Measures between Probability Density Functions. Int. J. Math. Model. Methods Appl. Sci. 2007, 1, 300–307. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Source | Rawness | Format | Position | BLE Beacon | Collection Procedure | Operational Environment | Beacon Conf. | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Meas. | Loc. | Samples | #RP | #Beacons | #Receivers | Floors | Area | Freq. | dBm | Slots | ||||||
| [23] | [24] | fingerprint | csv | local x-y and floor | IBKS 105 | Static | Active | 58 | 22 | 3 Smartphones | 1 | 151 | 5 | −20 | 1 | |
| Static | Active | 34 | 24 | Samsung Galaxy A5 | 3 | 171 | 5 | −220 | 1 | |||||||
| Static | Active | 34 | 24 | Samsung Galaxy A5 | 3 | 171 | 5 | −212 | 1 | |||||||
| Static | Active | 34 | 24 | Samsung Galaxy A5 | 3 | 171 | 5 | +4 | 1 | |||||||
| [25,26] | – | fingerprint | mySQL | local x-y and floor | – | Static | Active | 22 | 10 | Samsung Galaxy Young | 3 | 4275 | – | – | – | |
| [27] | [28] | fingerprint | png image | Room ID | RadBeacon Dot | Both | Passive | 21 | 10 | 21 x Rasp. Pi 3 | 3 | – | 10 | +3 | 1 | |
| [29] | [30] | raw RSSI | csv | local x-y and tag ID | Custom wearable | Both | Passive | 29 | 1 | 8 x Rasp. Pi 3 | 1 | 36 | 5 | – | 1 | |
| Both | Passive | 82 | 1 | 11 x Rasp. Pi 3 | 2 | 100 | 5 | – | 1 | |||||||
| Both | Passive | 57 | 1 | 11 x Rasp. Pi 3 | 2 | 90 | 5 | – | 1 | |||||||
| Both | Passive | 51 | 1 | 11 x Rasp. Pi 3 | 2 | 96 | 5 | – | 1 | |||||||
| [31] | [32] | raw RSSI | csv | – | Gimbal 10 Series | Motion | Passive | – | 46 | 32 x Rasp. Pi 3 | 3 | 5832 | 1 | +0 | 1 | |
| [15] | [33] | fingerprint | txt | local x-y | Gimbal 10 Series | Static | Active | 3 | 3 | Rasp. Pi 3 | 1 | 0.5 | – | – | 1 | |
| Static | Active | 3 | 3 | Rasp. Pi 3 | 1 | 2 | – | – | 1 | |||||||
| [34] | [35] | fingerprint | csv | Cell ID | iBeacon | Static | Active | 378 | 13 | smartphone | 1 | 3342 | – | – | 1 | |
| [36] | [37] | raw RSSI | csv | local x-y | Rasp. Pi 3 | Both | Active | 277 | 8 | Honor 8 Huawei | 1 | 185 | 10 | −18 | 1 | |
| Both | Active | 277 | 8 | Honor 8 Huawei | 1 | 185 | 10 | −26 | 1 | |||||||
| Both | Active | 277 | 8 | Honor 8 Huawei | 1 | 185 | 10 | +3 | 1 | |||||||
| RadBeacon Dot | Both | Passive | 277 | 1 | 4 x Rasp. Pi 3 | 1 | 185 | 10 | −218 | 1 | ||||||
| Both | Passive | 277 | 1 | 4 x Rasp. Pi 3 | 1 | 185 | 10 | −6 | 1 | |||||||
| Both | Passive | 277 | 1 | 4 x Rasp. Pi 3 | 1 | 185 | 10 | +3 | 1 | |||||||
| Slots | Eddystone 1 | Eddystone 2 | Eddystone 3 | Eddystone 4 | iBeacon 1 | iBeacon 2 |
|---|---|---|---|---|---|---|
| TX. Power (dBm) | +4 | 0 | −4 | −8 | −16 | −30 |
| Deployment 1 | Deployment 2 | Deployment 3 | |
|---|---|---|---|
| Number of beacons | 180 | 180 | 180 |
| Number of RP | 173 | 230 | 150 |
| Smartphones | 3 | 3 | 2 |
| Involved subjects | 2 | 2 | 2 |
| Number of samples | |||
| total area (m2) | |||
| accesible area (m2) | |||
| non-accesible area (m2) |
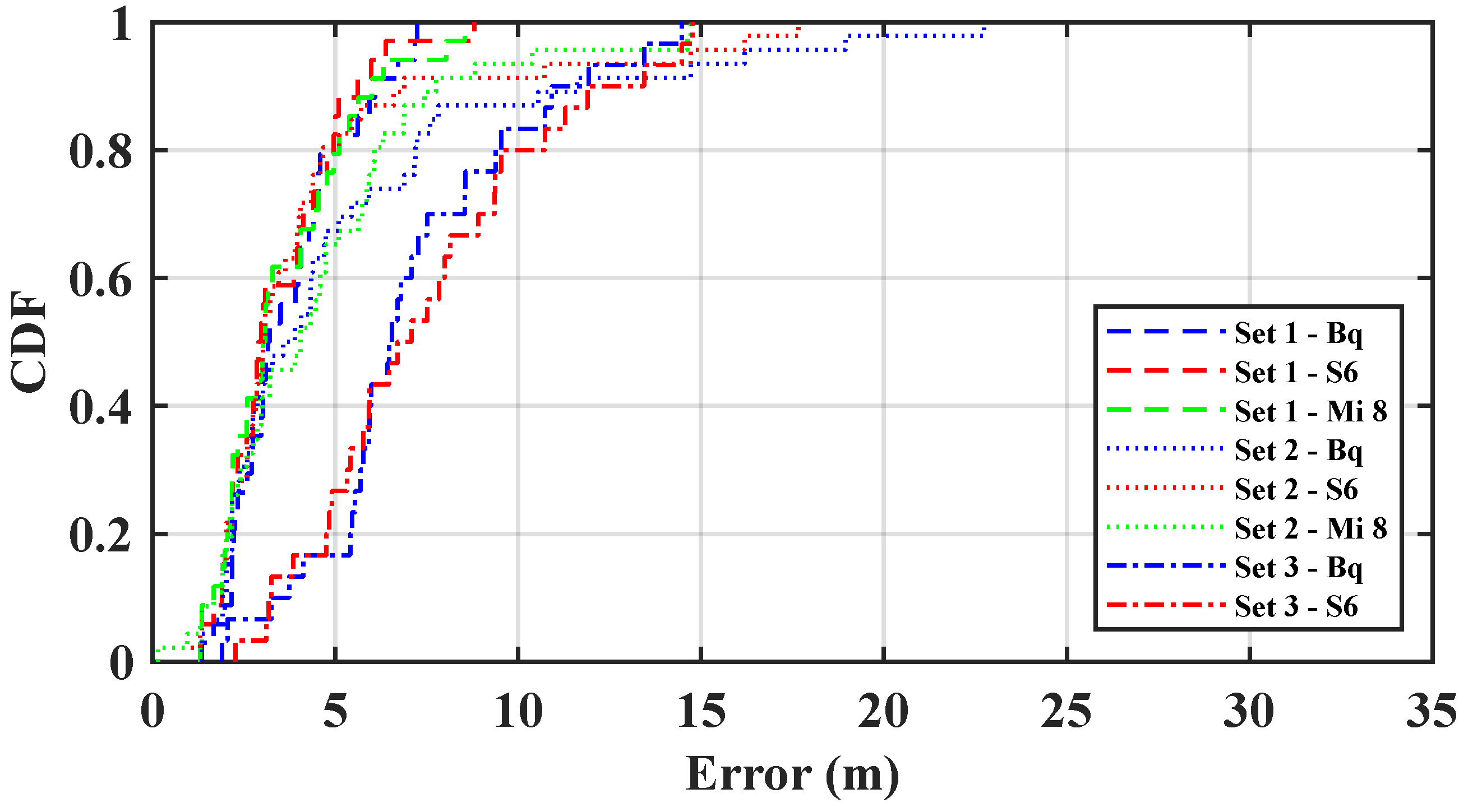
| Deployment | Mean (m) | P50th (m) | P95th (m) | Floor (%) | Label ID (%) |
|---|---|---|---|---|---|
| Set 1 - BQ | 3.86 | 3.06 | 10.75 | 0.82 | 0.88 |
| Set 1 - S6 | 4.05 | 2.99 | 9.01 | 0.85 | 0.88 |
| Set 1 - MI 8 | 3.57 | 3.04 | 7.72 | 0.97 | 0.97 |
| Set 2 - BQ | 6.98 | 4.48 | 23.09 | 0.89 | 0.91 |
| Set 2 - S6 | 5.26 | 3.91 | 15.01 | 0.91 | 0.89 |
| Set 2 - MI 8 | 4.01 | 3.54 | 8.89 | 0.97 | 0.97 |
| Set 3 - BQ | 6.94 | 6.44 | 13.44 | 0.73 | 0.93 |
| Set 3 - S6 | 7.18 | 6.50 | 14.47 | 0.7 | 0.96 |
| Average | 5.23 | 4.24 | 12.80 | 0.85 | 0.92 |
| Deployment | Mean (m) | P50th (m) | P95th (m) | Floor (%) | Label ID (%) |
|---|---|---|---|---|---|
| Set 1 - BQ | 4.08 | 3.62 | 9.08 | 0.82 | 0.88 |
| Set 1 - S6 | 3.68 | 3.01 | 7.62 | 0.85 | 0.88 |
| Set 1 - MI 8 | 3.93 | 3.12 | 8.38 | 0.91 | 0.91 |
| Set 2 - BQ | 5.44 | 4.19 | 14.98 | 0.82 | 0.84 |
| Set 2 - S6 | 5.06 | 3.75 | 15.01 | 0.93 | 0.91 |
| Set 2 - MI 8 | 5.29 | 4.03 | 15.01 | 0.95 | 0.95 |
| Set 3 - BQ | 8.79 | 6.50 | 11.92 | 0.86 | 0.93 |
| Set 3 - S6 | 8.71 | 7.02 | 17.75 | 0.8 | 0.9 |
| Average | 5.62 | 4.41 | 12.47 | 0.87 | 0.90 |
| Deployment | Mean (m) | P50th (m) | P95th (m) | Floor (%) | Label ID (%) |
|---|---|---|---|---|---|
| Set 1 - BQ | 3.71 | 3.17 | 7.07 | 0.79 | 0.85 |
| Set 1 - S6 | 3.48 | 2.93 | 6.29 | 0.94 | 0.97 |
| Set 1 - MI 8 | 3.55 | 3.04 | 7.69 | 0.94 | 0.97 |
| Set 2 - BQ | 5.30 | 3.72 | 16.74 | 0.95 | 0.98 |
| Set 2 - S6 | 4.18 | 3.04 | 15.01 | 0.93 | 0.95 |
| Set 2 - MI 8 | 4.53 | 4.03 | 11.22 | 0.91 | 0.91 |
| Set 3 - BQ | 7.09 | 6.50 | 13.44 | 0.76 | 0.93 |
| Set 3 - S6 | 7.46 | 6.88 | 14.47 | 0.70 | 0.93 |
| Average | 4.91 | 4.17 | 11.49 | 0.86 | 0.93 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aranda, F.J.; Parralejo, F.; Álvarez, F.J.; Torres-Sospedra, J. Multi-Slot BLE Raw Database for Accurate Positioning in Mixed Indoor/Outdoor Environments. Data 2020, 5, 67. https://doi.org/10.3390/data5030067
Aranda FJ, Parralejo F, Álvarez FJ, Torres-Sospedra J. Multi-Slot BLE Raw Database for Accurate Positioning in Mixed Indoor/Outdoor Environments. Data. 2020; 5(3):67. https://doi.org/10.3390/data5030067
Chicago/Turabian StyleAranda, Fernando J., Felipe Parralejo, Fernando J. Álvarez, and Joaquín Torres-Sospedra. 2020. "Multi-Slot BLE Raw Database for Accurate Positioning in Mixed Indoor/Outdoor Environments" Data 5, no. 3: 67. https://doi.org/10.3390/data5030067
APA StyleAranda, F. J., Parralejo, F., Álvarez, F. J., & Torres-Sospedra, J. (2020). Multi-Slot BLE Raw Database for Accurate Positioning in Mixed Indoor/Outdoor Environments. Data, 5(3), 67. https://doi.org/10.3390/data5030067