7.1. Supersonic Flat Plate
Although the flat plate shows a very simple geometry without a streamwise pressure gradient, it is very appropriate to evaluate the performance of any turbulence model due to the extensive experimental data, theoretical/empirical correlations and high-resolution numerical data available from the literature. In this study, a supersonic flat plate at a freestream Mach number,
, equal to 2 was computed. The Reynolds number, based on the streamwise
x-coordinate was
per unit length. The computational domain dimensions shown in
Figure 1a were 10.4 m × 0.78 m × 0.78 m along the
x-streamwise,
y-vertical and
z-spanwise directions, respectively. The boundary layer thickness by the end of the flat plate was
0.06 m, therefore, the computational box in terms of the reference boundary layer thickness was 173
. Hence, the computational box was wide enough to eliminate any influence from the lateral faces on the flow statistics. Furthermore, numerical results shown here were taken from the vicinity of the central longitudinal plane, far from lateral surfaces. Additionally, the height of the computational domain was sufficient (∼ 13
) to allow a natural streamwise developing of the turbulent boundary layer without interference of the top boundary condition. The hybrid mesh consisted of 1.1 million tetrahedral and 0.5 million prismatic elements. The boundary layer consisted of 24 layers with the closest point to the wall located at a distance of approximately
in wall units. A close-up of the boundary layer elements can be observed in
Figure 1b. A region with a bottom symmetry condition was imposed upstream of the flat plate leading edge. Downstream of the flat plate (where the no-slip condition was assumed for the velocity field), a freestream condition was prescribed. Similarly, at inflow, outflow and top surfaces, freestream values were imposed. An isothermal wall condition Was assumed for the temperature field with a wall to freestream temperature ratio (
equal to 1.75. This was a 3D case with a symmetry condition assumed in lateral faces. Iso-contours of the turbulent kinetic energy,
, are shown in
Figure 1c) from the Menter SST model. The starting and ending points of the flat plate were represented by two cross-sectional
cutting planes. The full
length of the flat plate was about 87
.
Figure 1c presents the natural evolution of
in the direction of the flow, which was mainly responsible for triggering turbulence.
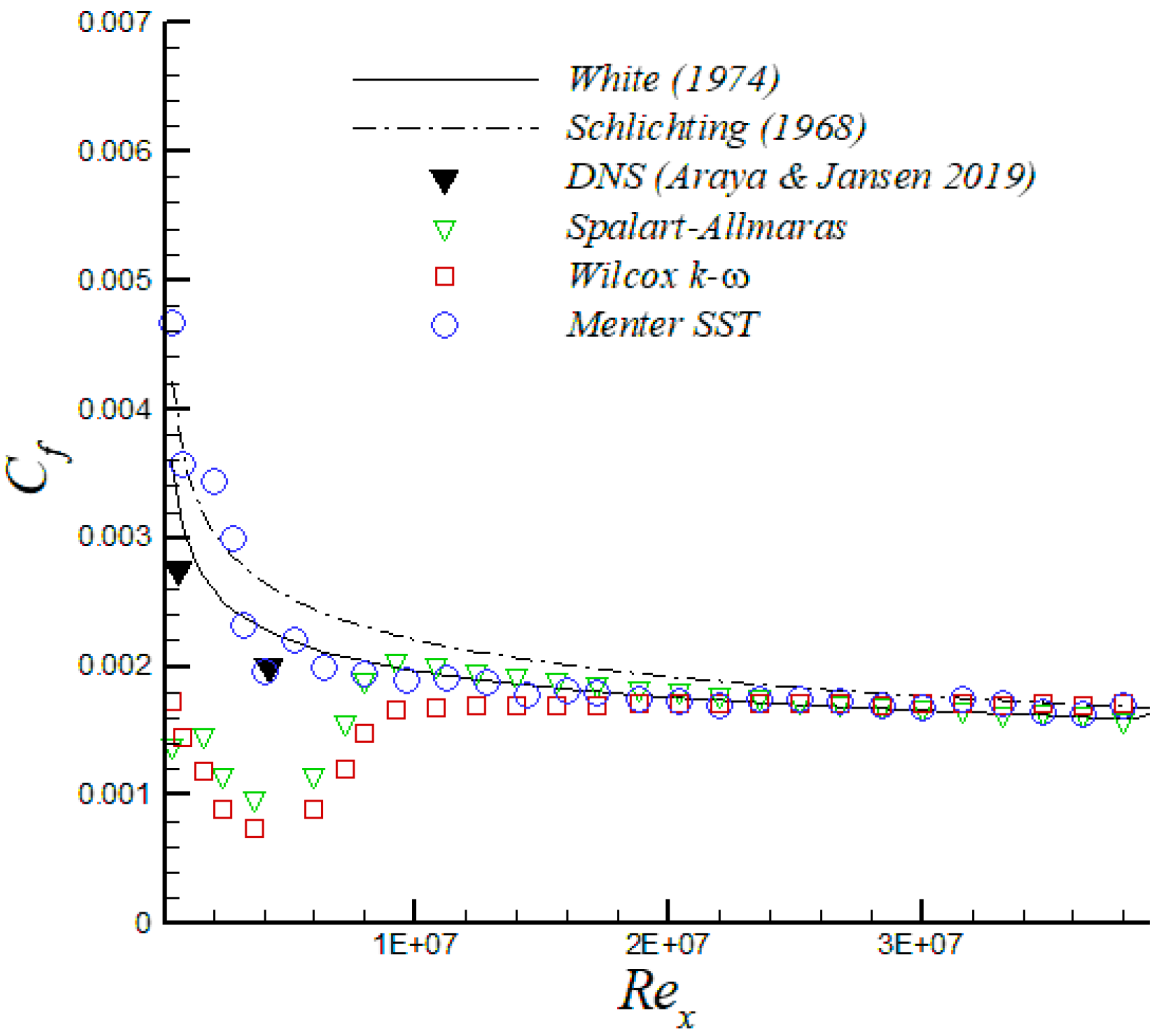
Figure 2 shows the streamwise variation of the skin friction coefficient,
, as a function of
. Generally speaking, the corresponding values obtained by Spalart–Allmaras, Wilcox
k-
and Menter SST turbulence models depicted an excellent agreement with theoretical correlations from White [
22] and Schlichting [
23], particularly by the end of the flat plate. However, the Menter SST model exhibited a shorter transition and the
profile quickly tended to realistic fully-turbulent values downstream from the leading edge. Additionally, Direct Numerical Simulation (DNS) data from Araya and Jansen [
24] are also included for a supersonic isothermal flat plate (
2.25) at a freestream Mach number,
, of 2.5 and low Reynolds numbers. Again, the Menter SST turbulence model exhibited a good agreement of
with high spatial/temporal numerical results. Generally speaking, the mean streamwise velocity along the boundary layer followed the DNS profile of Araya and Jansen [
24] and the 1/7 power-law distribution in the outer region (i.e.,
0.1), as shown in
Figure 3a for
. Nevertheless, all velocity profiles computed from turbulence models depicted some deviations in the inner region (where the 1/7 power law did not work properly) from the DNS profile. The thermal boundary layer plays a crucial role in the transport phenomena of compressible wall-bounded flows; consequently, its accurate understanding and modeling are very important. In other words, the coupled behavior of the velocity and thermal field should be properly represented. In
Figure 3b, the computed temperature distributions,
, as a function of the mean streamwise velocity,
, are plotted at a streamwise station where
. For comparison, the theoretical Crocco–Busemann relation (see page 502 in White [
22]) is also included. The Crocco–Busemann relation assumes a linear variation of the total enthalpy across the boundary layer in zero pressure gradient with a unitary turbulent Prandtl number. Furthermore, present RANS thermal profiles showed good agreement with the quadratic Crocco–Busemann relationship. It is worth mentioning that the Crocco–Busemann relation is a function of the local wall-temperature; therefore, a slightly different theoretical profile was obtained for each turbulence model.
7.2. Transonic RAE 2822 Airfoil
This evaluation test consisted on the simulation of steady turbulent transonic flow around the RAE2822 airfoil, which is the standard test Case 9 [
25] for turbulence modeling. The freestream Mach number was
, the Reynolds number was
and the angle of attack was
2.79°. This problem was solved using a 3D hybrid and unstructured mesh. The mesh consisted of 4.2 million tetrahedral elements, 1.9 million prismatic elements and 2 thousand pyramid elements. The total number of elements was approximately 6.1 million. The boundary layer consisted of 40 layers with the closest point to the wall located at a distance of
or approximately
0.1–0.4 in wall units.
Table 1 shows the computed values of lift, drag and moment coefficients for the Spalart–Allmaras, Wilcox
k-
and Menter SST turbulence models, together with experimental data from the AGARD AR–138 report [
25] and other numerical simulations in 2D and structured meshes [
26,
27]. In
Table 1,
stands for Not Available. For this simulation case, all turbulence models produced values of
within 11 lift counts (1 lift count = 0.001) with respect to experiments by Cook et al. [
25]. Similarly, the predicted total drag coefficients,
, showed good agreement with experiments with a maximum discrepancy of 1.5 drag counts (1 drag count = 0.0001), at most, for the Menter SST model; nevertheless, it generated the most accurate moment coefficient at 25% of the chord,
.
In general, the three models are in good agreement with the experimental results and other simulation values, as shown in
Table 1. Furthermore, the pressure (
) and skin friction (
) coefficients are depicted in
Figure 4, together with the corresponding experimental data from the AGARD AR–138 report [
25]. The predicted values of
in the upper surface looked very similar in all turbulence models. The weak shock at
was not fully captured by turbulence models with discrepancies in the order of 9% in peaks of
. Downstream, a quasi-zero pressure gradient zone with almost constant values of
and about half-chord in length was observed. The second and stronger shock located at
was accurately captured by all models. Perhaps, the Menter SST slightly separated from the experimental values by the end of the shock (i.e.,
). The strong shock was characterized by a sharp increase of wall pressure. The presence of a very strong APG induced a small flow separation zone, which is discussed below. Beyond this zone of “pockets” with supersonic flow, the wall pressure kept increasing towards the trailing edge, but at a moderate rate. In addition, the numerical predictions of
on the lower surface were almost identical to the experimental values given by all turbulence models. The skin friction coefficient is defined as
, where
is the wall shear stress, and
and
are the density and velocity at the edge of the boundary layer, respectively. From the results in
Figure 4b, it was inferred that the closest values to experiments were produced by the Menter SST model in the upper side, particularly at the strong shock location (i.e.,
). Furthermore, the Spalart–Allmaras and Wilcox
k-
models were observed to perform similarly; however, the Wilcox
k-
was the only turbulence model that predicted a shock-induced separation due to the presence of a very strong APG, with a small recirculating zone around 0.55
0.60, as shown in
Figure 4b. All models slightly underpredicted the experimental value of the skin friction on the lower surface.
Figure 5 shows iso-contours of the Mach number for the Wilcox
k-
model. This transonic regime was characterized by the formation of regions or “pockets" with supersonic flow. Since the flow must return to its freestream conditions by the time of reaching the trailing edge, this caused the formation of a strong shock by
where subsonic flow was observed beyond that point.
During the mesh generation, a good resolution was ensured by clustering the first-off wall point well inside the linear viscous layer (i.e.,
) to accurately predict the skin friction coefficient. Accordingly, the distance distribution of the first off-wall point in wall units,
, along the RAE2822 airfoil and based on the Menter SST model is shown in
Figure 6 together with the airfoil coordinates in the right vertical axis. It can be seen that
was around 0.4 in the vicinity of the leading edge for the lower surface; however,
was lower than 0.1 in the upper surface, where the flow faced more complex pressure changes. Consequently, the high spatial resolution of the employed mesh was demonstrated. In
Figure 7, profiles of the mean streamwise velocity downstream of the strong shock in the upper surface (i.e., at
0.65 and 0.75) are depicted. Notice that the mean streamwise velocity was normalized by the local velocity at the edge of the boundary layer,
. In general, for velocity profiles shown in
Figure 7a,b, the Menter SST model produced the most accurate velocity profiles of the three turbulence models tested in this study, when compared to experimental values from Cook et al. [
25]. It is interesting to point out that both velocity profiles at
0.65 and 0.75 were located in a zone of very strong APG or increasing pressure, as shown in
Figure 4a. Furthermore, the Shear Stress Transport (SST) formulation by Menter [
19] focused on improving the performance of this turbulence model in adverse pressure gradient flows. Thus, the results depicted in
Figure 7a,b support the previous statement. In addition, the corresponding displacement thickness,
, momentum thickness,
, and, shape factor
H (
) were computed at these stations. These integral boundary layer parameters (i.e.,
and
) are defined as follows for compressible flows,
where subscripts
e stands for values at the edge of the boundary layer. In
Table 2, the computed values of
,
and
H are exhibited for the three turbulence models together with experimental data from Cook et al. [
25]. Furthermore, it was established that the three models analyzed in this investigation gave a similar level of accuracy on the calculation of the boundary layer parameters; nevertheless, the Menter SST was slightly superior to the other models with an average discrepancy of 5% with respect to experiments. In addition, the knowledge of the shape factor,
H, in turbulent flows is important in assessing how strongly the APG is imposed. In fact, the higher is the value of H, the stronger is the APG. Similarly, it is well known that any flow subjected to strong deceleration is prone to separation, where most of the turbulence models find enormous difficulties. In this opportunity, we picked up two stations in the RAE2822 airfoil (i.e.,
= 0.65 and 0.75) with strong APG or high shape factors. The idea was to evaluate the performance of the turbulence models in extreme conditions. Generally speaking, the Menter SST model showed the best performance in describing the physics of the flow subjected to strong APG.
7.3. ONERA M6 Wing
The third test case considered the simulation of the flow over the ONERA M6 wing [
28], where the freestream Mach number was
, the angle of attack was
and the Reynolds number based on the mean geometric chord was
. The hybrid mesh employed consisted of 6.3 million tetrahedral elements, 2.5 million prisms and 11.6 thousand pyramids. The surface mesh consisted of 1.1 million triangular elements. The mesh had 35 viscous layers and the first off-wall point was located at
in wall units.
The values of lift and drag coefficient for the Spalart–Allmaras, Wilcox
k-
and Menter SST turbulence models are shown in
Table 3 together with numerical results from Le Moigne and Qin [
29] and Nielsen and Anderson [
30]. A maximum of nine lift counts deviation in the lift coefficient
between the three turbulence models was observed. In addition, a maximum of 14 drag counts difference in the drag coefficient
was computed, of which nine drag counts were due to the friction contribution to the drag coefficient. Furthermore, the present numerical results of lift and drag coefficients are in good agreement with numerical values by Le Moigne and Qin [
29] and Nielsen and Anderson [
30], who employed the Baldwin–Lomax and Spalart–Allmaras turbulence model, respectively. The pressure coefficient profiles
at different sections across the wing span are depicted in
Figure 8. All three models captured reasonably well the corresponding location of both shocks at each wing span section, given by abrupt modifications on
. The most significant discrepancies were observed at
, where none of the three models were able to appropriately represent the shock within 0.25 <
< 0.35. However, a similar behavior of the Spalart–Allmaras and Wilcox
k-
turbulence models at
was reported by Huang et al. [
31], Jakirlić et al. [
32] and Nielsen and Anderson [
30]. The skin friction coefficient
is plotted in
Figure 9 at spanwise stations
= 0.9 and 0.95. These figures show the good agreement among all turbulence models about the location of the flow separation point
0.25 and 0.2 for
= 0.9 and 0.95, respectively. The downstream recovery of
was different in all turbulence models, with the Wilcox
k-
and Menter SST turbulence models predicting similar reattachment lengths and Spalart–Allmaras producing the largest reattachment length. The Menter SST model induced higher values for the skin friction downstream of the reattachment point, which was consistent with the largest values of
shown in
Table 3.
Figure 10 shows iso-surfaces of negative streamwise velocities normalized by the freestream velocity
. The recirculating flow bubble in dark blue (identified by a white circle) predicted by the Spalart–Allmaras model was slightly larger than that of predicted by the Menter SST model. Iso-contours of the streamwise velocity, normalized by the freestream velocity
, are depicted in
Figure 11 in Menter SST at
, where a strong shock wave can be clearly observed around
0.25 of the upper surface. Furthermore, the interaction of this shock with the turbulent boundary layer provoked a recirculating zone represented by the dark blue area.
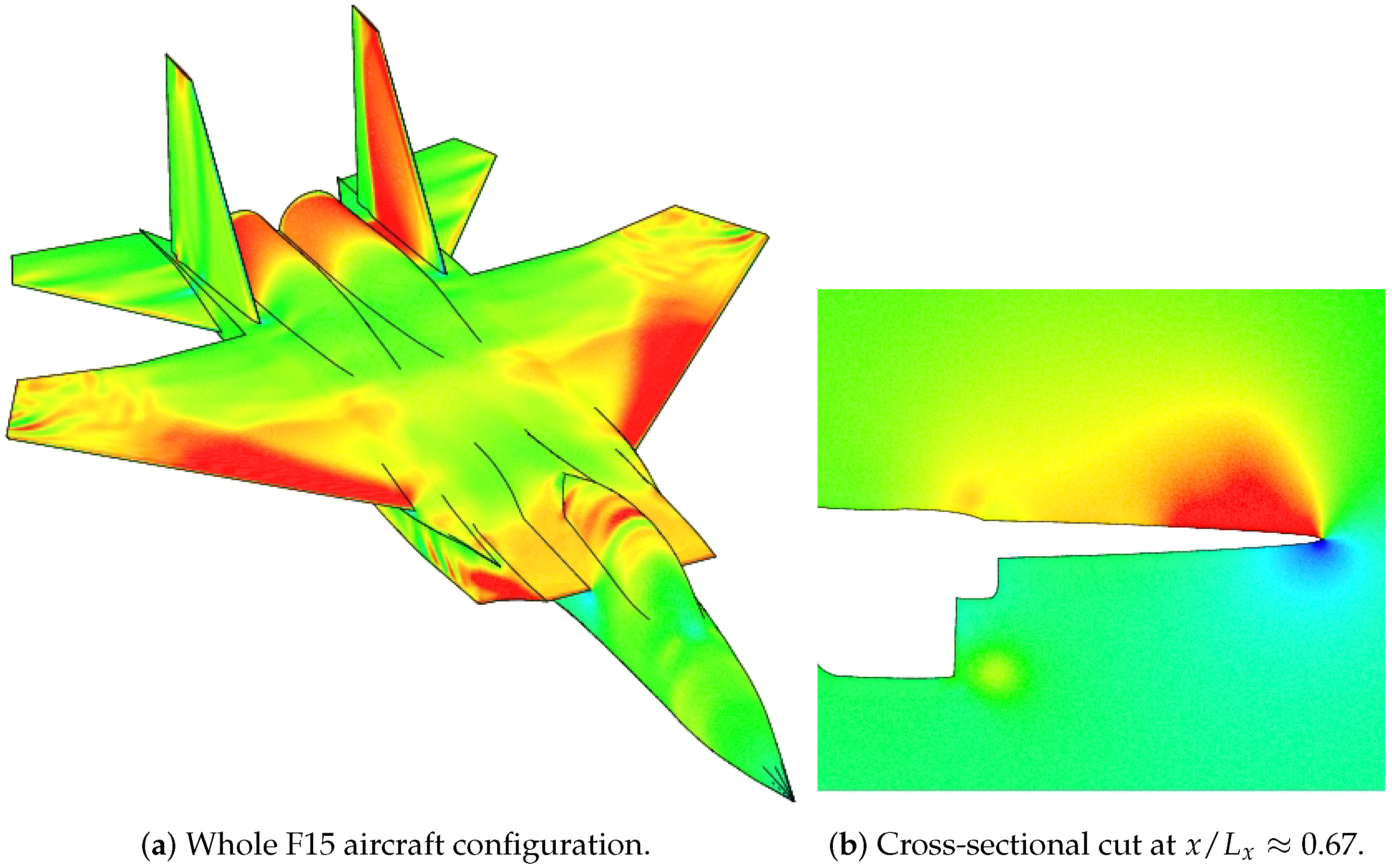
7.4. Generic F15 Aircraft Configuration
The last example corresponds to a generic F15 aircraft configuration, which represents a very complex and challenging geometry for CFD simulations with concave and convex surface curvatures. The freestream Mach number was
, the Reynolds number, based on the airplane length (
18 m), was
and the angle of attack was five degrees. The hybrid mesh consisted of 12.5 million nodes and 49 million elements (36 million tetrahedra, 12.7 million prisms and 48.5 thousand pyramids). Due to the spanwise symmetry nature of the problem, only half of the model was used for the simulation. In
Figure 12a, the employed surface mesh is plotted by mirroring the half-aircraft grid across the symmetry plane. In addition, details of the viscous layers can be seen by means of the cut plane at
in
Figure 12b. Additionally, the boundary layer was made of 44 layers and the first off-wall point was prescribed at
m, which ensured that the location of this point was in the linear viscous layer for an accurate skin friction computation. A great deal of thought was given to the design of all computational meshes and dimensions in the present study to ensure grid-independent numerical results. The selected mesh spacing distribution, shown in this section, was the result of grid convergence study that was carried out to obtain grid independent results. The numerical simulations were run on 128 processors.
Table 4 shows the lift coefficient,
, and the drag coefficient,
, for each turbulence model. The numerical results of
obtained by the three turbulence models were consistent with a maximum difference of seven lift counts. Furthermore, the largest discrepancy observed in the
coefficient was 24 drag counts between the Menter SST and Wilcox
k-
turbulence models.
In
Figure 13a, iso-contours of the pressure coefficient
over the entire F15 aircraft configuration are depicted. Strong shock waves were observed on the canopy over the cock pit, leading edge of wings and between the vertical tails. The cut plane in
Figure 13b at
depicted high values of
toward the wing tip. In addition, a top view of iso-contours of
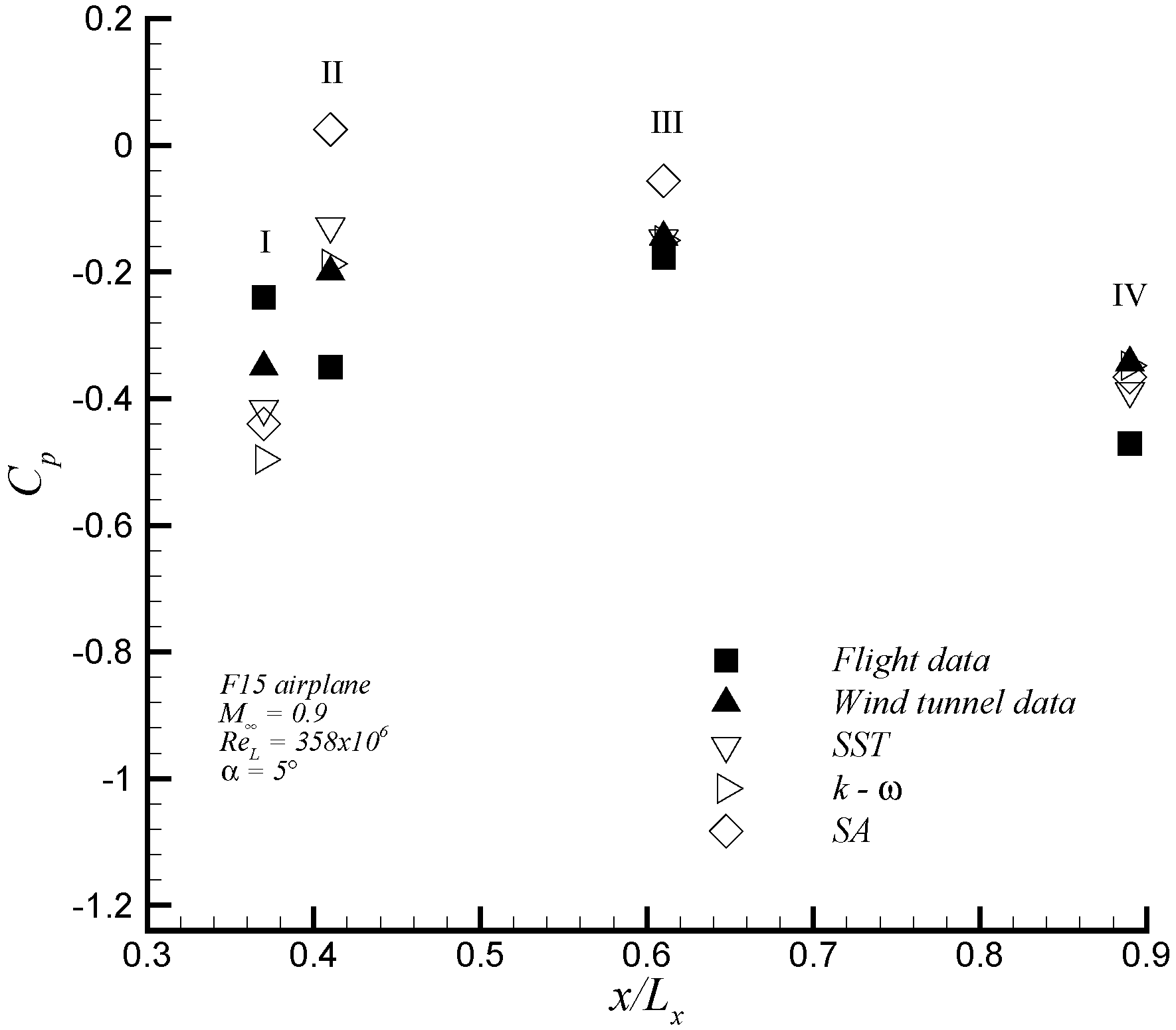
are shown in
Figure 14. The value of the pressure coefficient at four points (labeled as I–IV in
Figure 14) were compared with flight and wind tunnel data from Webb et al. [
33], as shown in
Figure 15. In general, the present numerical results are in good agreement with the experimental wind tunnel data. Furthermore, it can be noticed that the pressure coefficients given by the Menter SST model showed a better match with experimental data than those calculated by Spalart–Allmaras and Wilcox
k-
models. In addition, the most significant discrepancies of the numerical results of
with experiments were found in the region
, just above the turbine intake. The discrepancy can be attributed to the difference between the estimated engine mass flow prescribed and the used engine mass flow during the flight test. This was emphasized by the significant scattering between the experimental data (in flight and wind tunnel), particularly, at Points I and II. In this zone, the different turbulence models predicted different separation regions, which are discussed below. Hence, this resulted in different local flow patterns that induced different pressure coefficients.
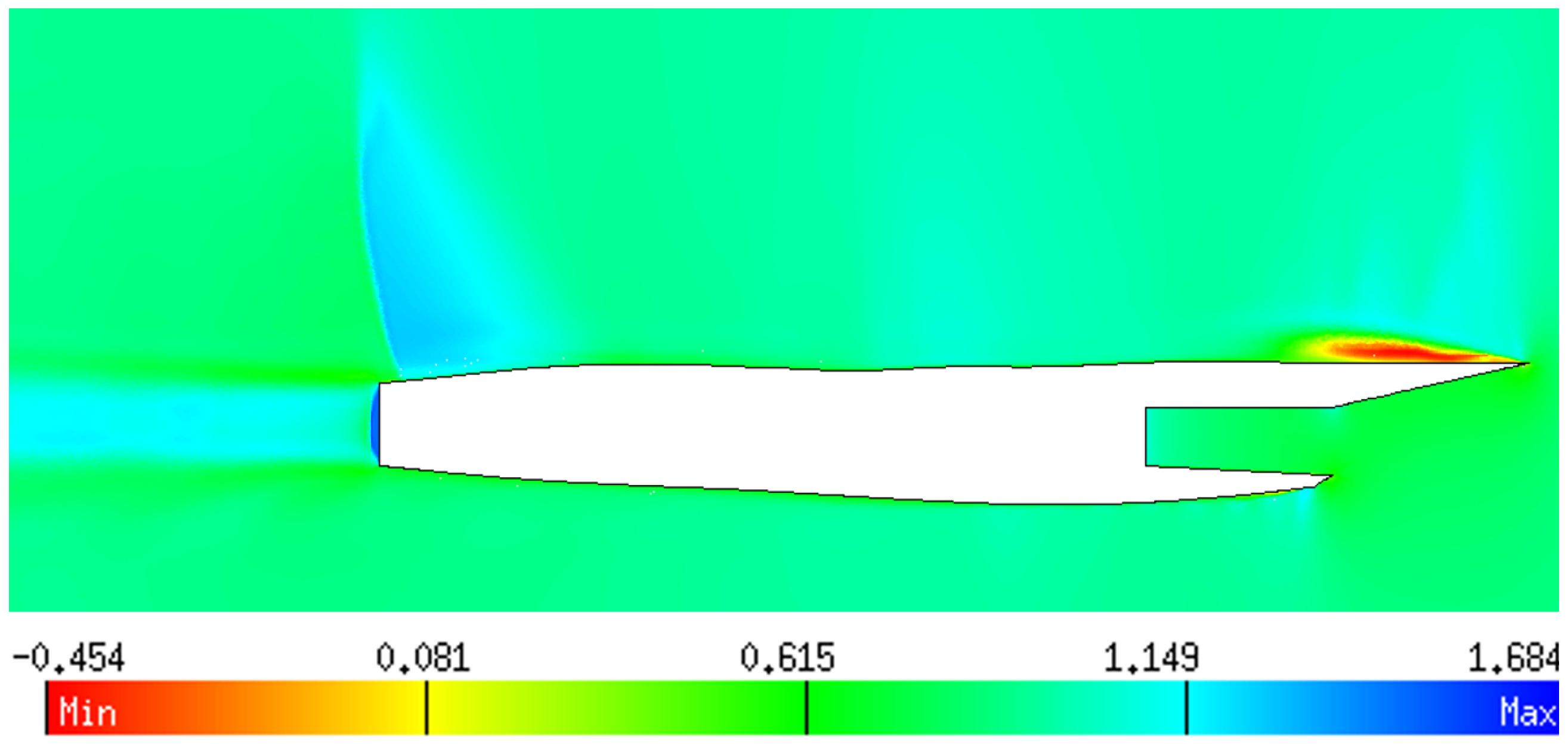
The skin friction coefficient
at a spanwise location of
or
, where
m is the semi-span length of the aircraft, is plotted in
Figure 16. The study of the drag coefficient due to friction showed that this section had the largest discrepancy between the three turbulence models, as observed in
Figure 16a.
Figure 16b indicates that the Wilcox
k-
model predicted two separation bubbles at
and 0.36, respectively, while the other two models predicted a single separated region (i.e., at
) with the Menter SST predicting a much larger separation region than that computed by the Spalart–Allmaras model. Furthermore, the iso-contours of streamwise velocity (normalized by the freestream velocity
) by the Menter SST model, as shown in
Figure 17, indicated the presence of a lengthy recirculation zone with negative values of the velocity above the turbine intake, given by the shock wave-boundary layer interaction.
Figure 18 and
Figure 19 show the pressure coefficients on the upper and lower surfaces of the wing at two different spanwise locations,
and 0.59, respectively. In addition, the vertical coordinates,
z, of the local profile are represented by the vertical axis on the right. It is shown in
Figure 18a that, at
, the
profiles predicted by the three turbulence models showed similar upper peak values in the vicinity of the leading edge, i.e.,
. Hence, it can be concluded that the pressure difference between the surface static pressure to the freestream static pressure was equal to the freestream dynamic pressure in absolute value at this location. On the other hand, the Wilcox
k-
model predicted a stronger second shock wave located at
. In the lower side, a moderate APG zone was observed in 0.55
0.6, as shown in
Figure 18b, followed by a nearly ZPG region. Furthermore,
Figure 19a shows similar peak values of
in the upper surface and close to the leading edge at station
by all three turbulence models. However, the Spalart–Allmaras model predicted a much stronger second shock located further downstream of the leading edge (at
) than those predicted by the Menter SST and Wilcox
k-
model. All turbulence models exhibited similar
distributions in the lower surface, as shown in
Figure 19b.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}