Parameters and Branching Auto-Pulses in a Fluid Channel with Active Walls

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Numerical Experiments
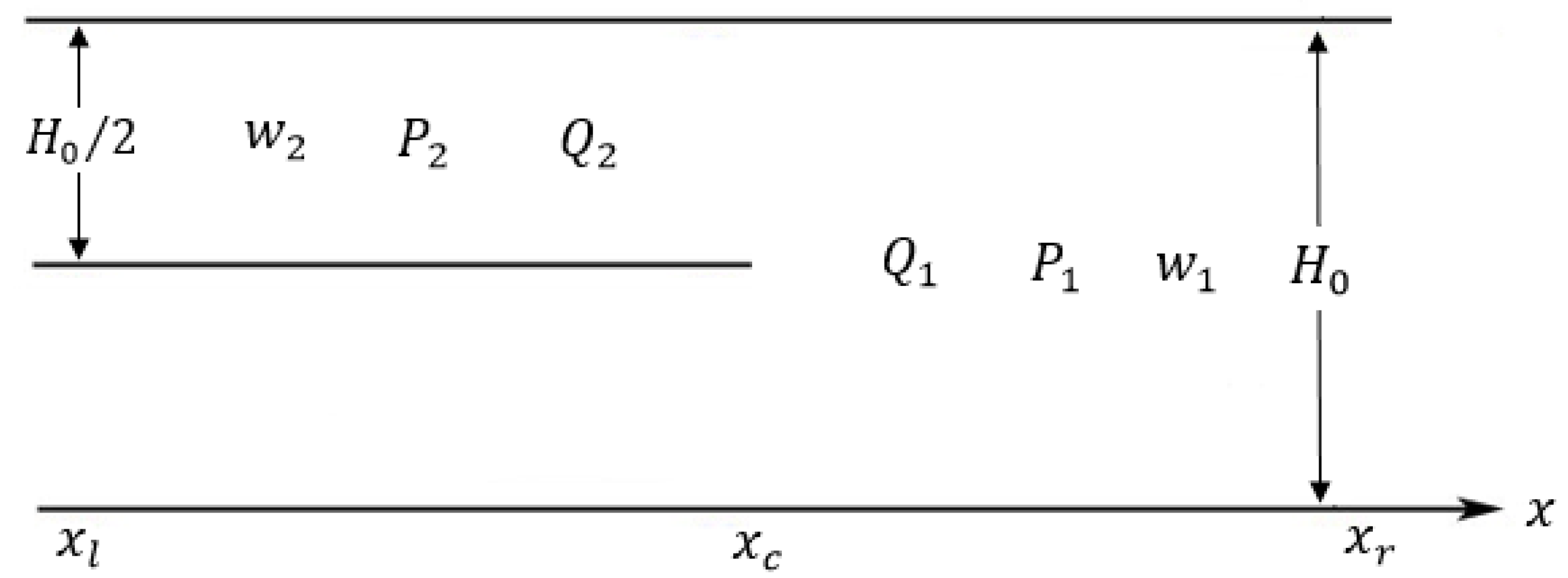
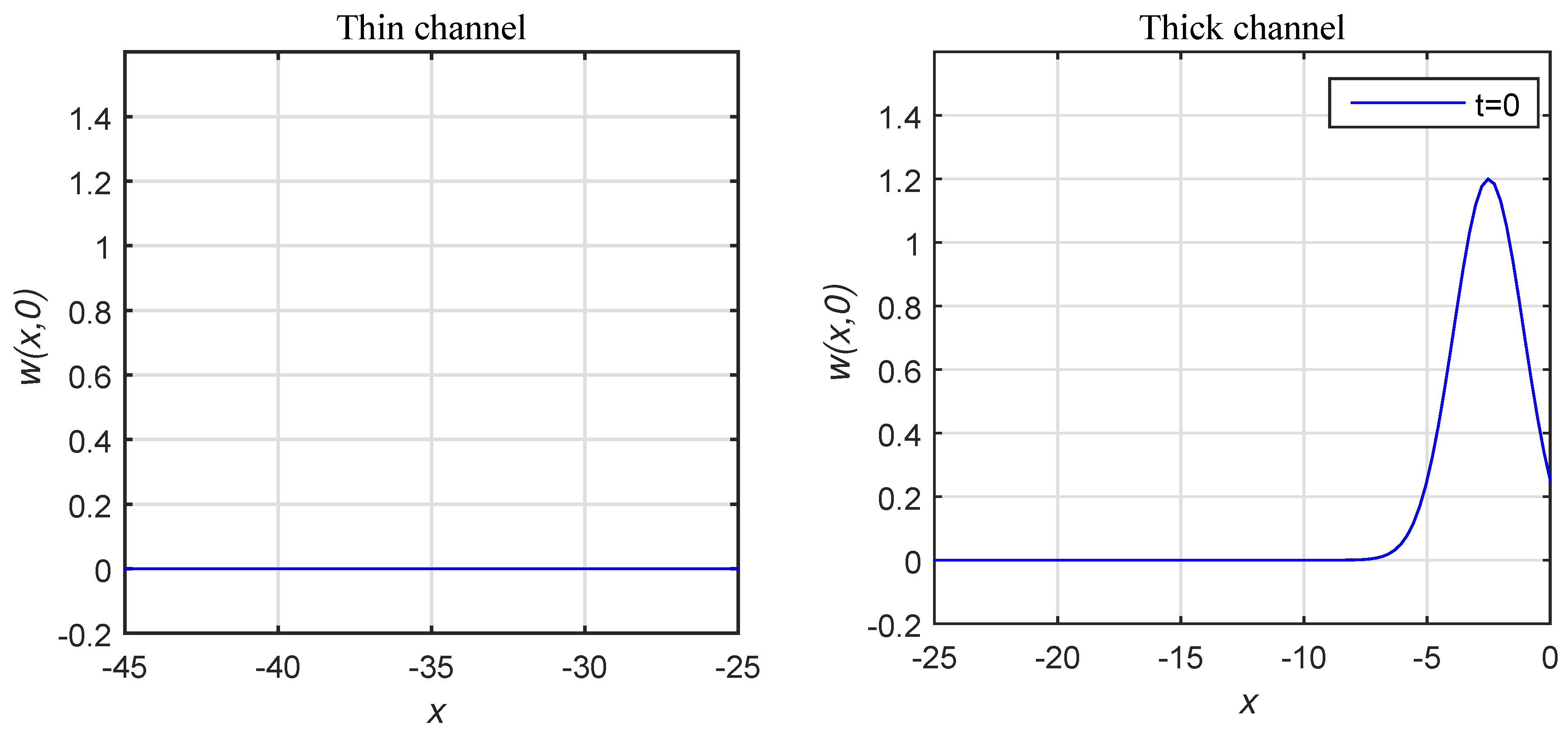
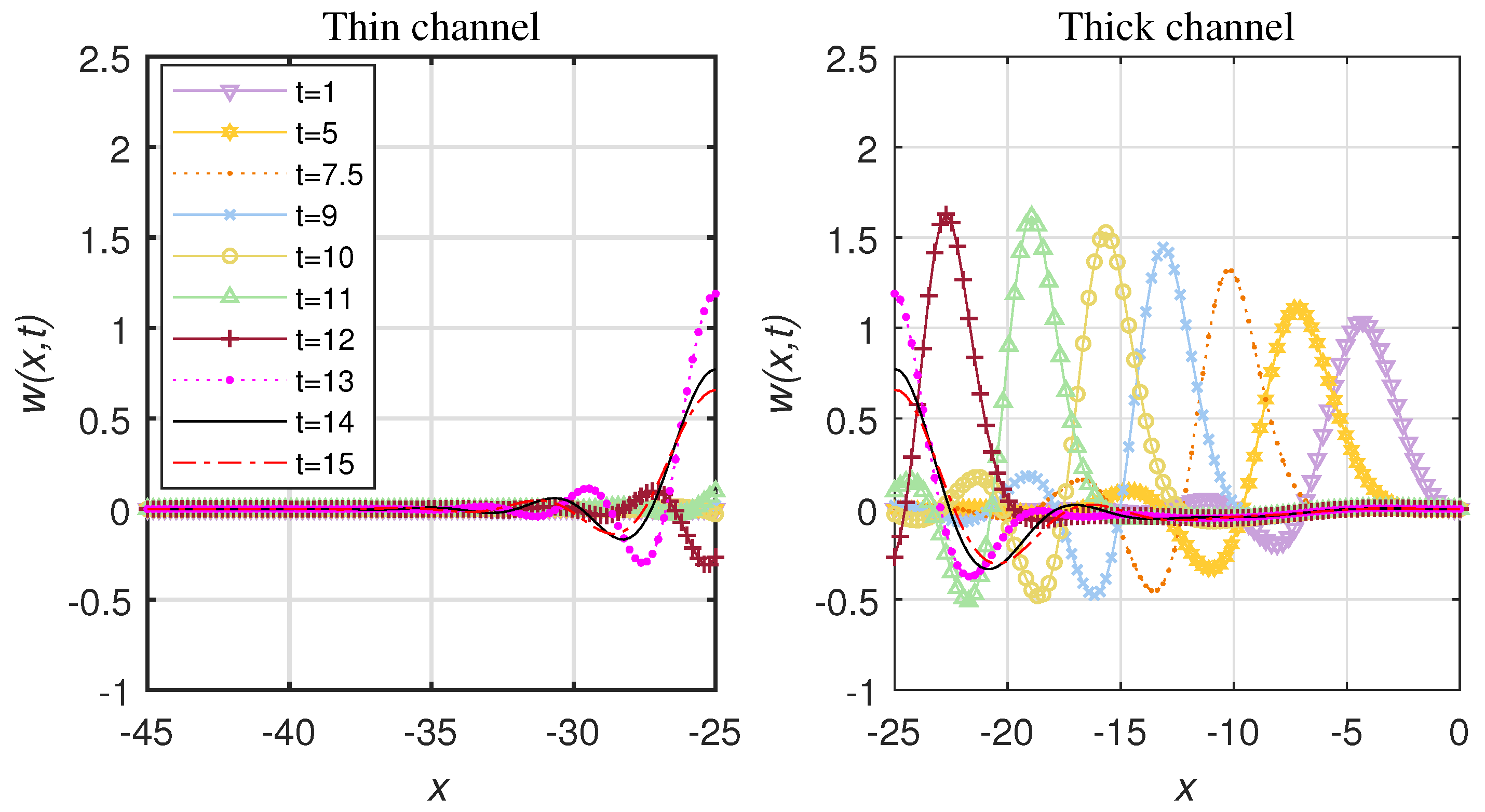
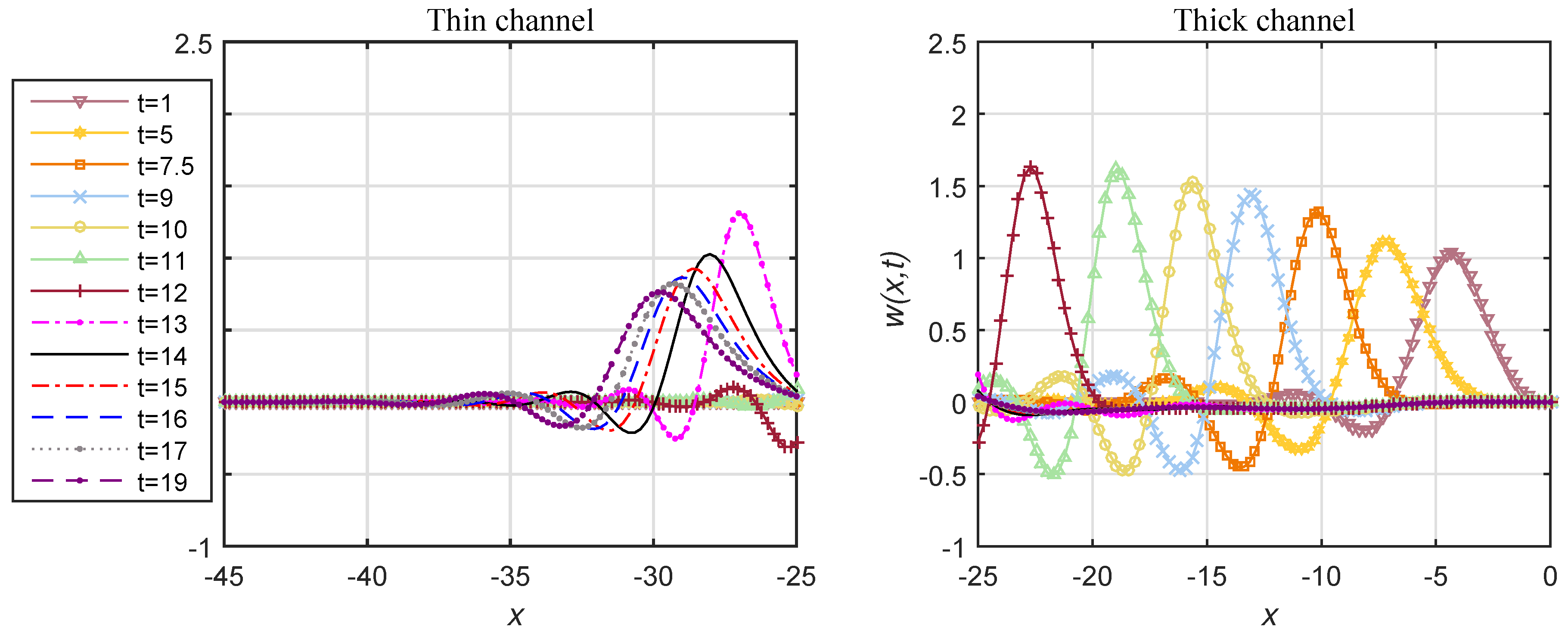
2.1. Two-Channel Experiment
2.2. Three-Channel Experiment
3. Evaluation of the Model Coefficients
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ahmed, F.Z.; Mohammed, M.G.; Strunin, D.V.; Ngo-Cong, D. Simulations of autonomous fluid pulses between active elastic walls using the 1D-IRBFN method. Math. Model. Nat. Phenom. 2018, 13, 47. [Google Scholar] [CrossRef]
- Li, S.; Vogt, D.M.; Rus, D.; Wood, R.J. Fluid-driven origami-inspired artificial muscles. Proc. Natl. Acad. Sci. USA 2017, 114, 13132–13137. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bessonov, N.; Sequeira, A.; Simakov, S.; Vassilevskii, Y.; Volpert, V. Methods of blood flow modelling. Math. Model. Nat. Phenom. 2016, 11, 1–25. [Google Scholar] [CrossRef]
- Robertson, A.M.; Sequeira, A.; Owens, R.G. Rheological models for blood. In Cardiovascular Mathematics; Springer: Milano, Italy, 2009; pp. 211–241. [Google Scholar]
- Robertson, A.M.; Sequeira, A.; Kameneva, M.V. Hemorheology. In Hemodynamical Flows; Birkhäuser: Basel, Switzerland, 2008; pp. 63–120. [Google Scholar]
- Quarteroni, A.; Veneziani, A.; Zunino, P. Mathematical and numerical modeling of solute dynamics in blood flow and arterial walls. SIAM J. Numer. Anal. 2002, 39, 1488–1511. [Google Scholar] [CrossRef]
- Alastruey, J.A. Numerical Modelling of Pulse Wave Propagation in the Cardiovascular System: Development, Validation and Clinical Applications. Ph.D. Thesis, University of London, London, UK, 2006. [Google Scholar]
- Roberts, A.J. A One-Dimensional Introduction to Continuum Mechanics; World Scientific: Singapore, 1994. [Google Scholar]
- Strunin, D.V. Fluid flow between active elastic plates. ANZIAM J. 2009, 50, 871–883. [Google Scholar] [CrossRef]
- Huang, R.; Suo, Z. Wrinkling of a compressed elastic film on a viscous layer. J. Appl. Phys. 2002, 91, 1135–1142. [Google Scholar] [CrossRef]
- Landau, L.D.; Lifshitz, E.M. Theory of Elasticity; Pergamon: London, UK, 1959; pp. 57–60. [Google Scholar]
- Timoshenko, S.; Woinowsky-Krieger, S. Theory of Plates and Shells; McGraw-Hill: New York, NY, USA, 1987. [Google Scholar]
- Ahmed, F.Z.; Strunin, D.V.; Mohammed, M.G.; Bhanot, R.P. Numerical solution for the fluid flow between active elastic walls. ANZIAM J. 2016, 57, 221–234. [Google Scholar] [CrossRef]
- Mai-Duy, N.; Tran-Cong, T. Numerical solution of differential equations using multiquadric radial basis function networks. Neural Netw. 2001, 14, 185–199. [Google Scholar] [CrossRef] [Green Version]
- Quarteroni, A.; Valli, A. Numerical Approximation of Partial Differential Equations; Springer: New York, NY, USA, 1997. [Google Scholar]
- London, G.M.; Pannier, B. Arterial functions: how to interpret the complex physiology. Nephrol. Dial. Transpl. 2010, 25, 3815–3823. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lehmann, E.D. Clinical value of aortic pulse-wave velocity measurement. Lancet 1999, 354, 528–529. [Google Scholar] [CrossRef]
- Zhang, X.; Kinnick, R.R.; Fatemi, M.; Greenleaf, J.F. Noninvasive method for estimation of complex elastic modulus of arterial vessels. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 52, 642–652. [Google Scholar] [CrossRef] [PubMed]
- Olufsen, M.S.; Peskin, C.S.; Kim, W.Y.; Pedersen, E.M.; Nadim, A.; Larsen, J. Numerical simulation and experimental validation of blood flow in arteries with structured-tree outflow conditions. Ann. Biomed. Eng. 2000, 28, 1281–1299. [Google Scholar] [CrossRef] [PubMed]
- Matthys, K.S.; Alastruey, J.; Peiró, J.; Khir, A.W.; Segers, P.; Verdonck, P.R.; Parker, K.H.; Sherwin, S.J. Pulse wave propagation in a model human arterial network: assessment of 1-D numerical simulations against in vitro measurements. J. Biomech. 2007, 40, 3476–3486. [Google Scholar] [CrossRef] [PubMed]
- Surovtsova, I. Effects of compliance mismatch on blood flow in an artery with endovascular prosthesis. J. Biomech. 2005, 38, 2078–2086. [Google Scholar] [CrossRef] [PubMed]
- Avolio, A.P. Multi-branched model of the human arterial system. Med Biol. Eng. Comput. 1980, 18, 709–718. [Google Scholar] [CrossRef] [PubMed]
- Kalita, P. Shell Models of the Artery Wall. Schedae Inform. 2004, 13, 104–122. [Google Scholar]
- Quarteroni, A.; Tuveri, M.; Veneziani, A. Computational vascular fluid dynamics: problems, models and methods. Comput. Vis. Sci. 2000, 2, 163–197. [Google Scholar] [CrossRef]












© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Strunin, D.; Ahmed, F. Parameters and Branching Auto-Pulses in a Fluid Channel with Active Walls. Fluids 2019, 4, 160. https://doi.org/10.3390/fluids4030160
Strunin D, Ahmed F. Parameters and Branching Auto-Pulses in a Fluid Channel with Active Walls. Fluids. 2019; 4(3):160. https://doi.org/10.3390/fluids4030160
Chicago/Turabian StyleStrunin, Dmitry, and Fatima Ahmed. 2019. "Parameters and Branching Auto-Pulses in a Fluid Channel with Active Walls" Fluids 4, no. 3: 160. https://doi.org/10.3390/fluids4030160
APA StyleStrunin, D., & Ahmed, F. (2019). Parameters and Branching Auto-Pulses in a Fluid Channel with Active Walls. Fluids, 4(3), 160. https://doi.org/10.3390/fluids4030160