The Effect of Cornering on the Aerodynamics of a Multi-Element Wing in Ground Effect


Abstract
:1. Introduction
2. Methodology
2.1. Experimental Methodology
2.1.1. Wing Geometry
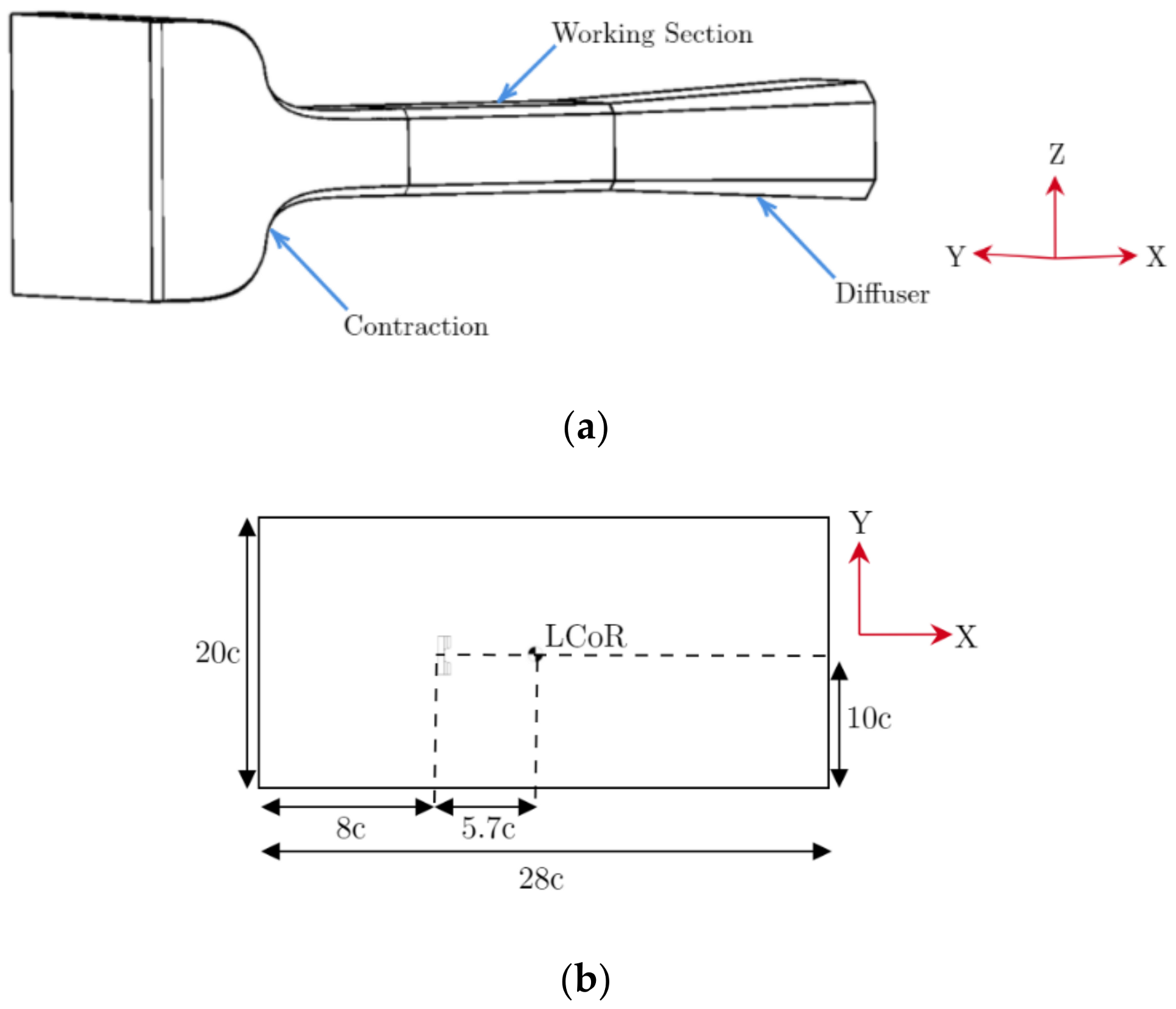
2.1.2. Wind Tunnel
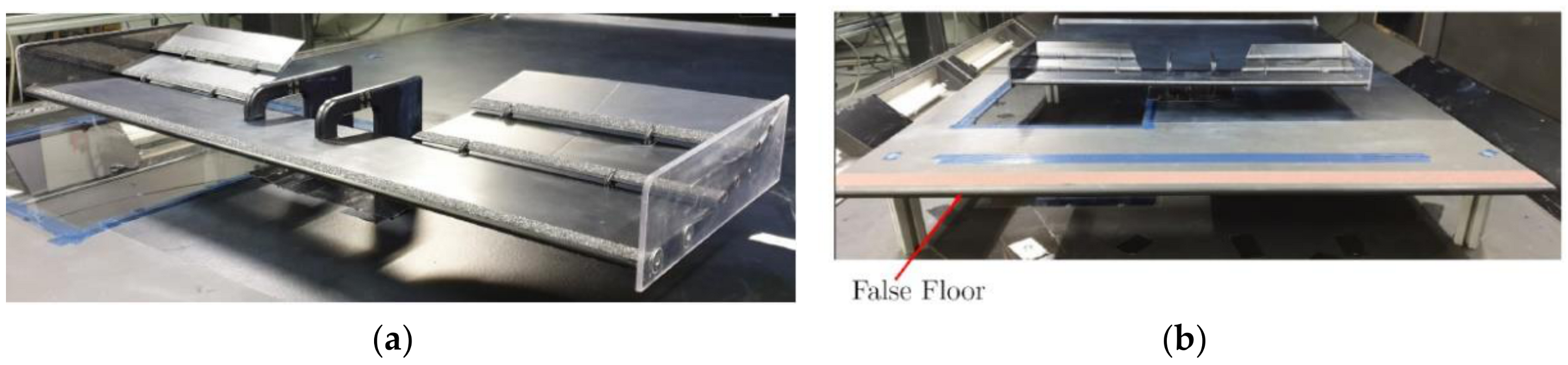
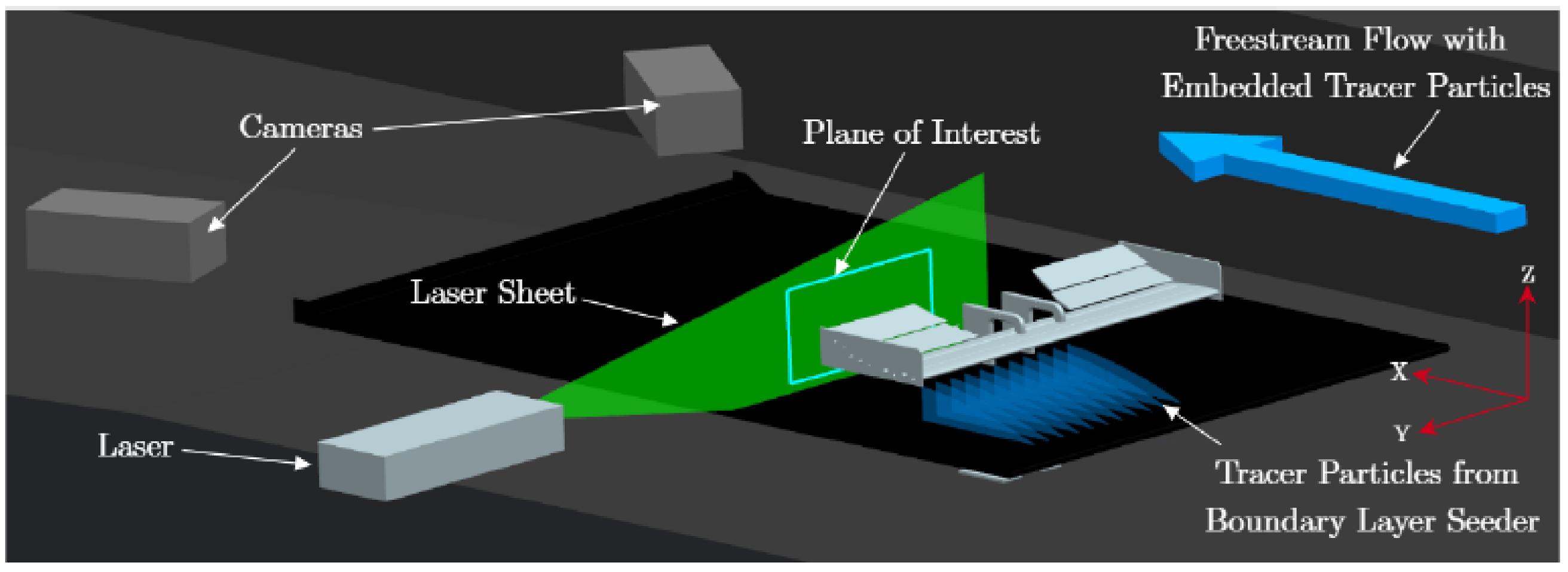
2.1.3. Stereo Particle Image Velocimetry (PIV)
2.2. Numerical Methodology
2.2.1. Wing Geometries
2.2.2. Computational Domain
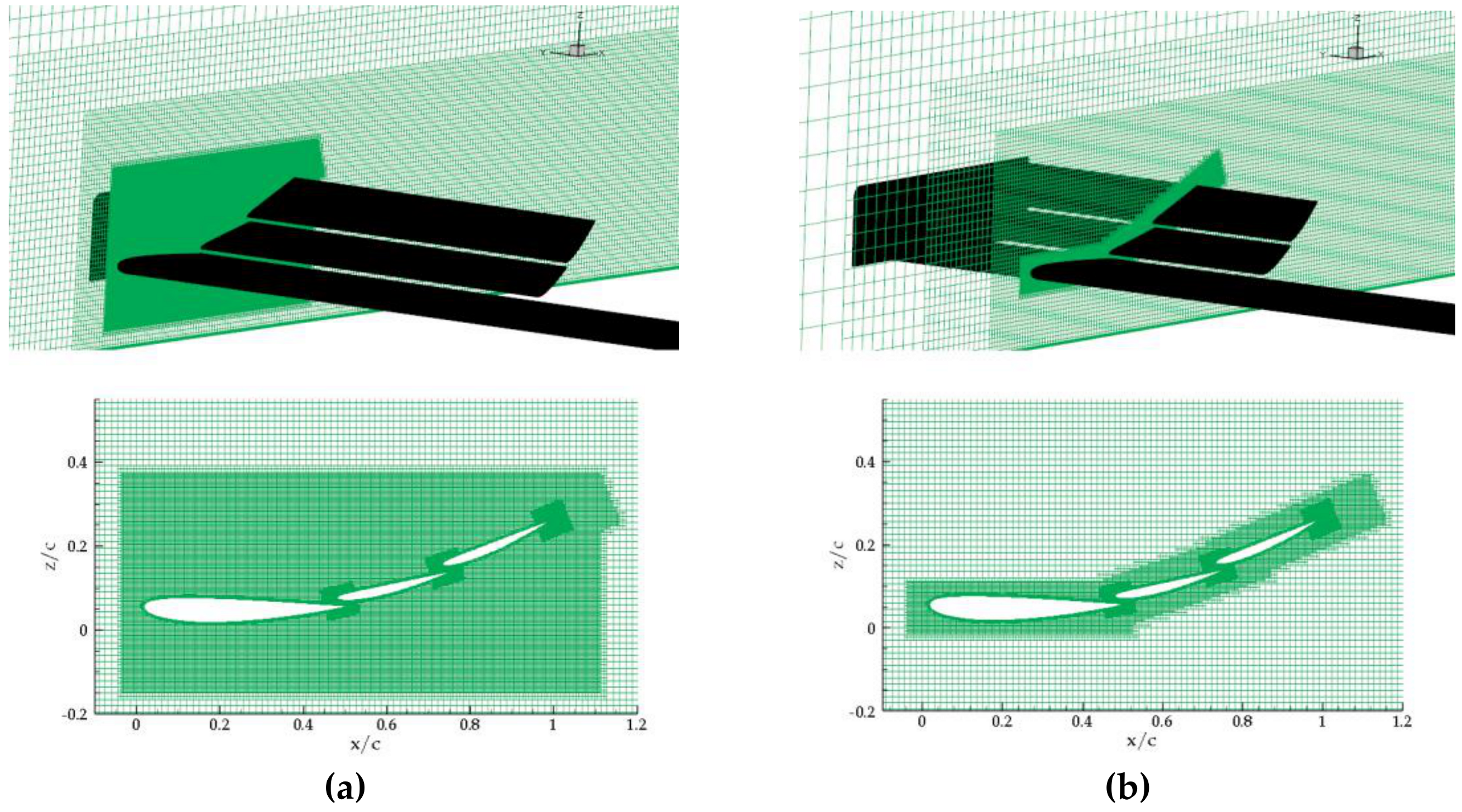
2.2.3. Meshing
2.2.4. Physics Modelling
2.2.5. Temporal Discretisation
2.2.6. Post-Processing
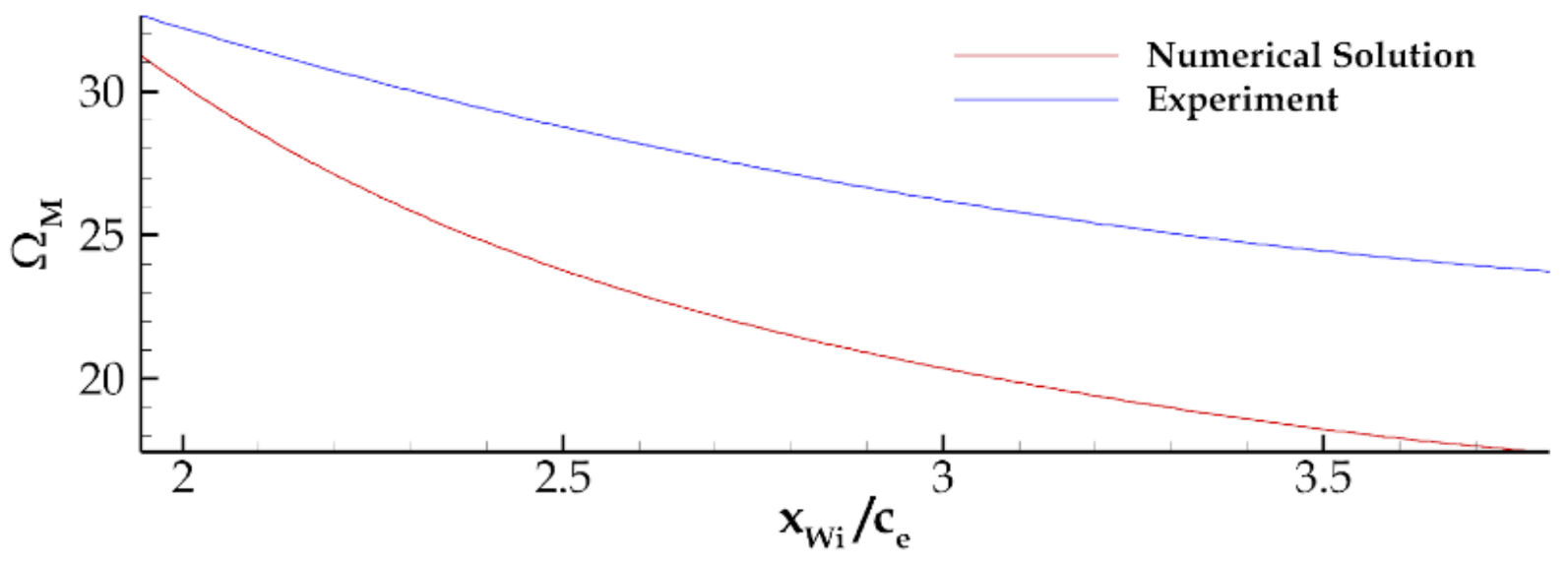
3. Results & Discussion: Numerical Validation
4. Results & Discussion: Comparison of Straight-line, Cornering & Fixed Yaw Conditions
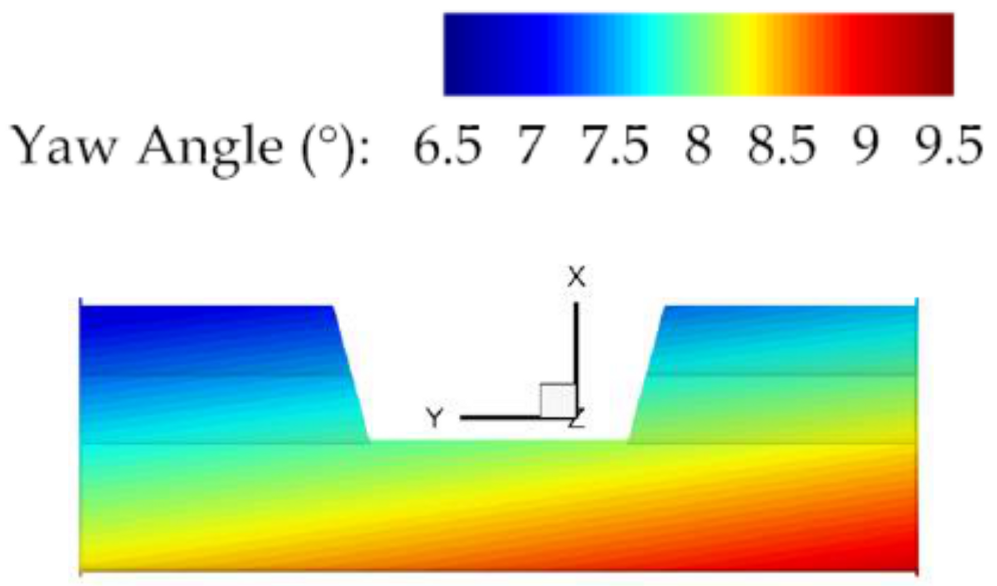
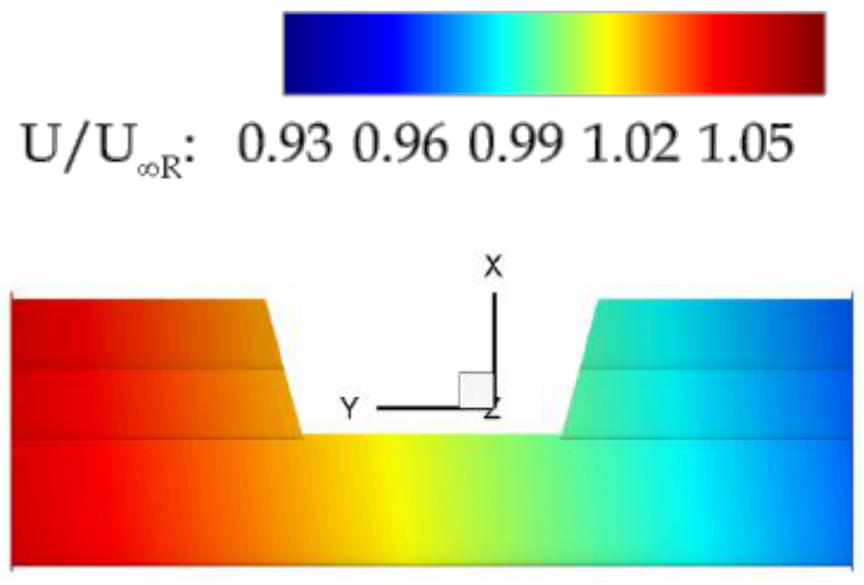
4.1. Cornering Flow-Field Characteristics
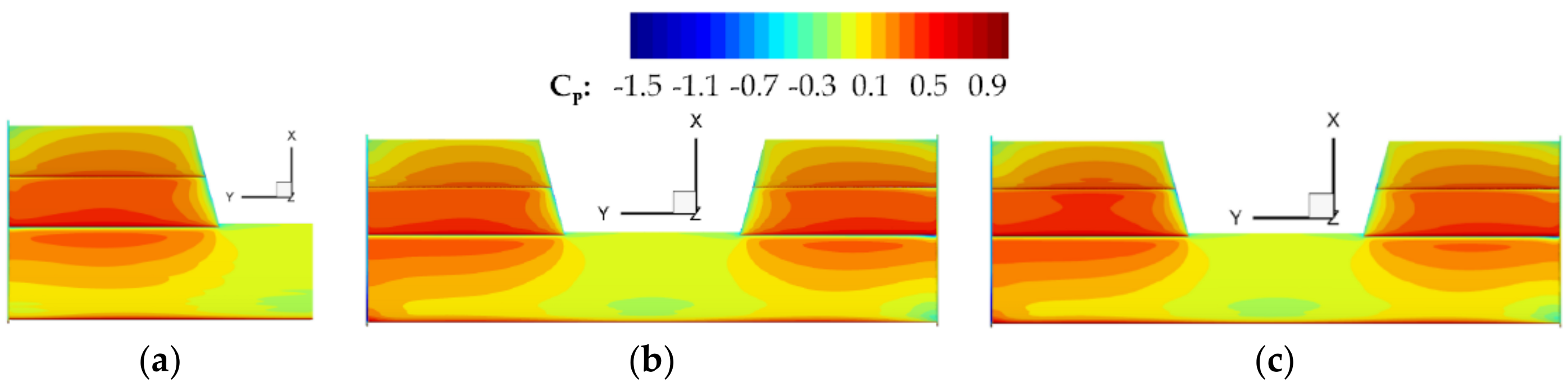
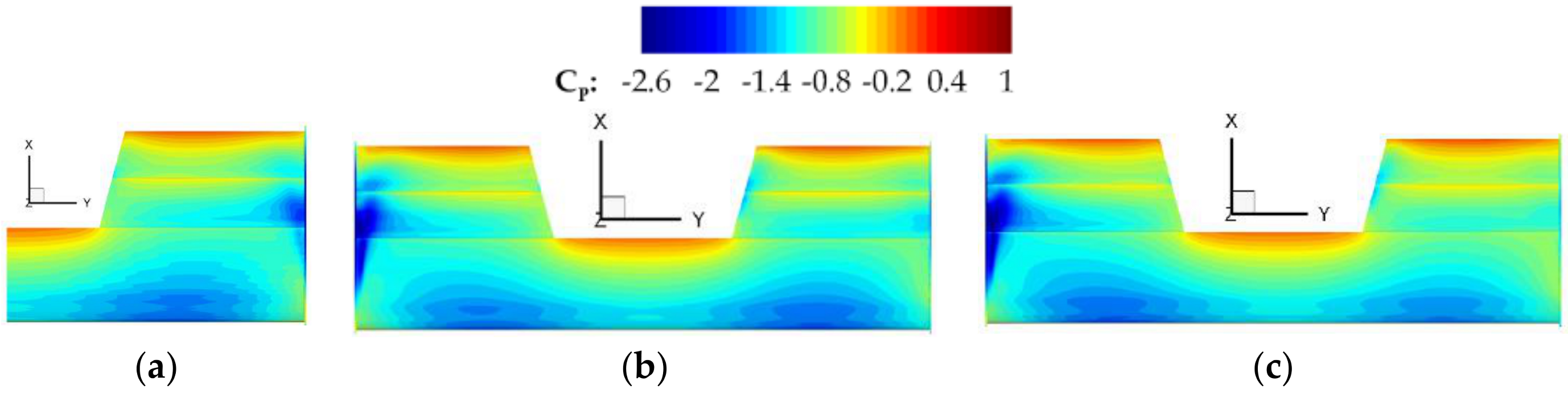
4.2. On-Surface Pressure Distribution
4.3. Force Analysis
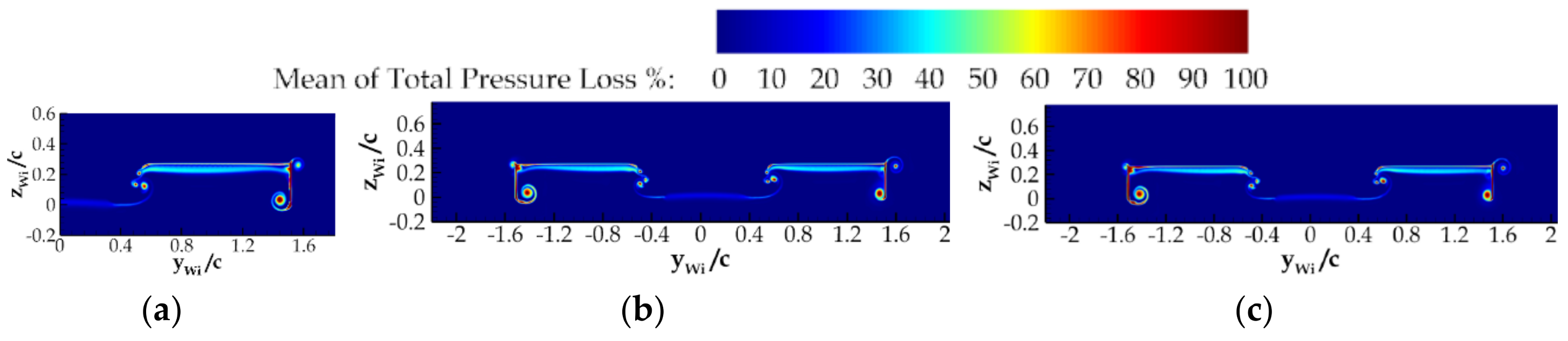
4.4. Off-Surface Flow-Field
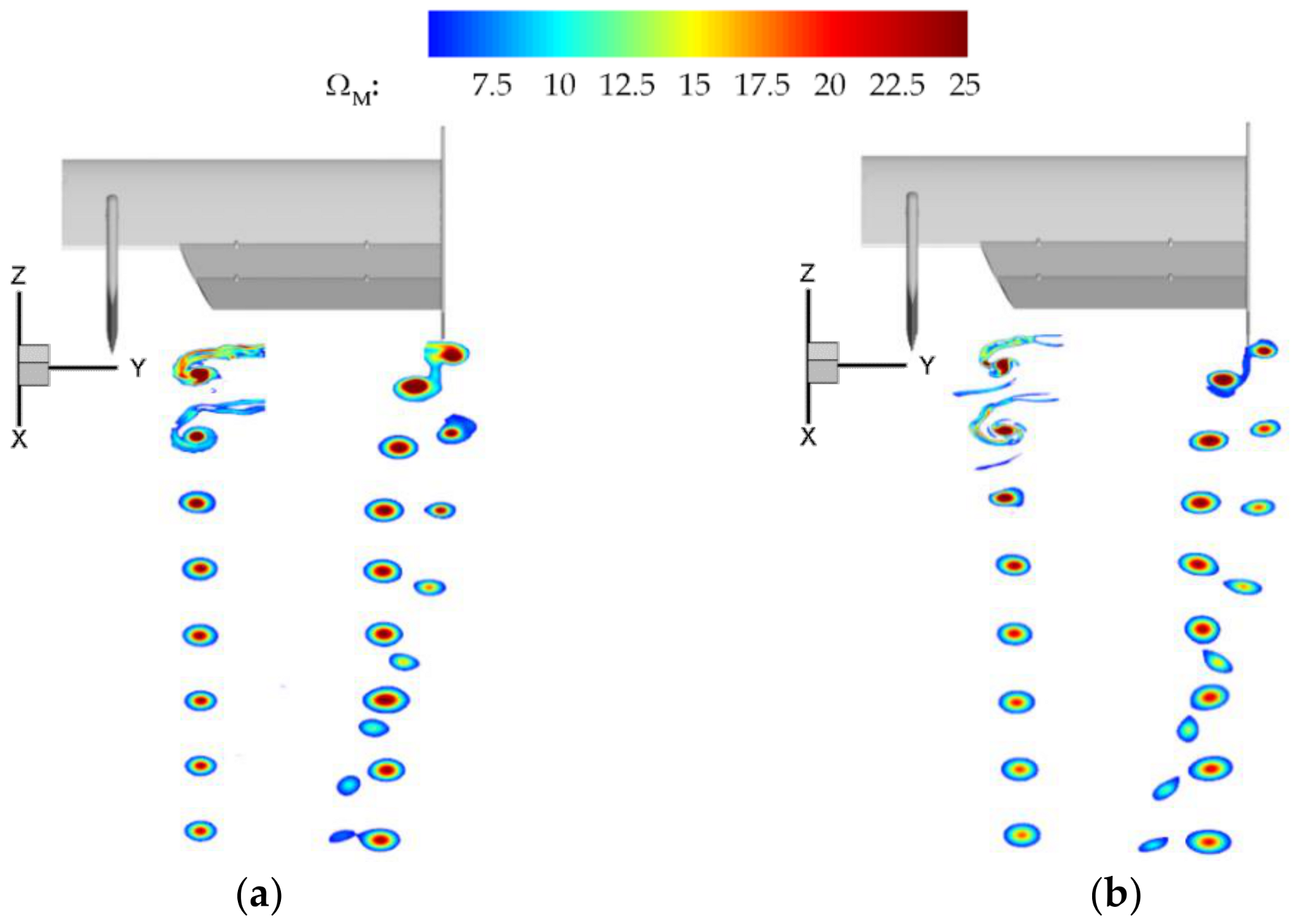
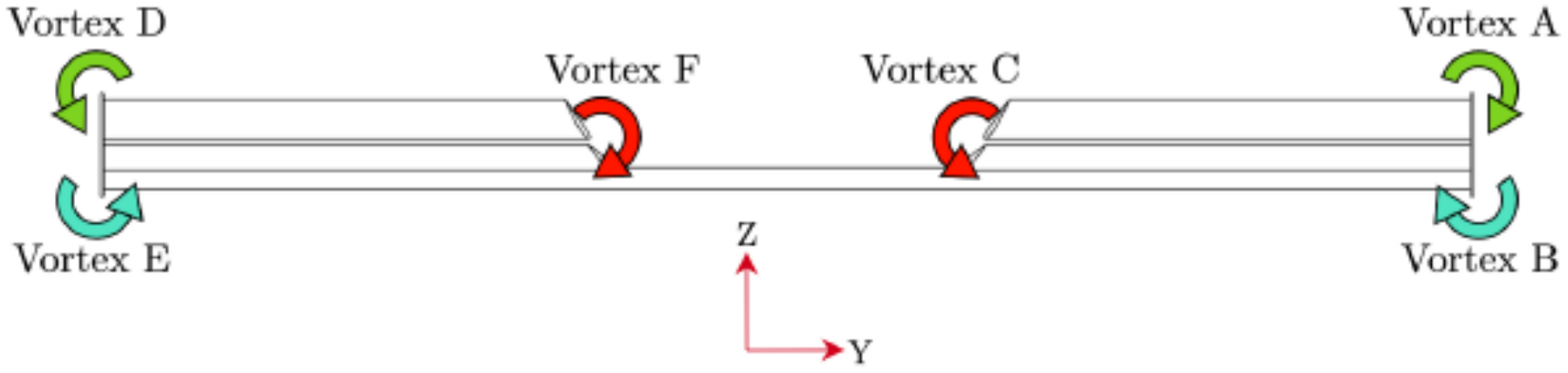
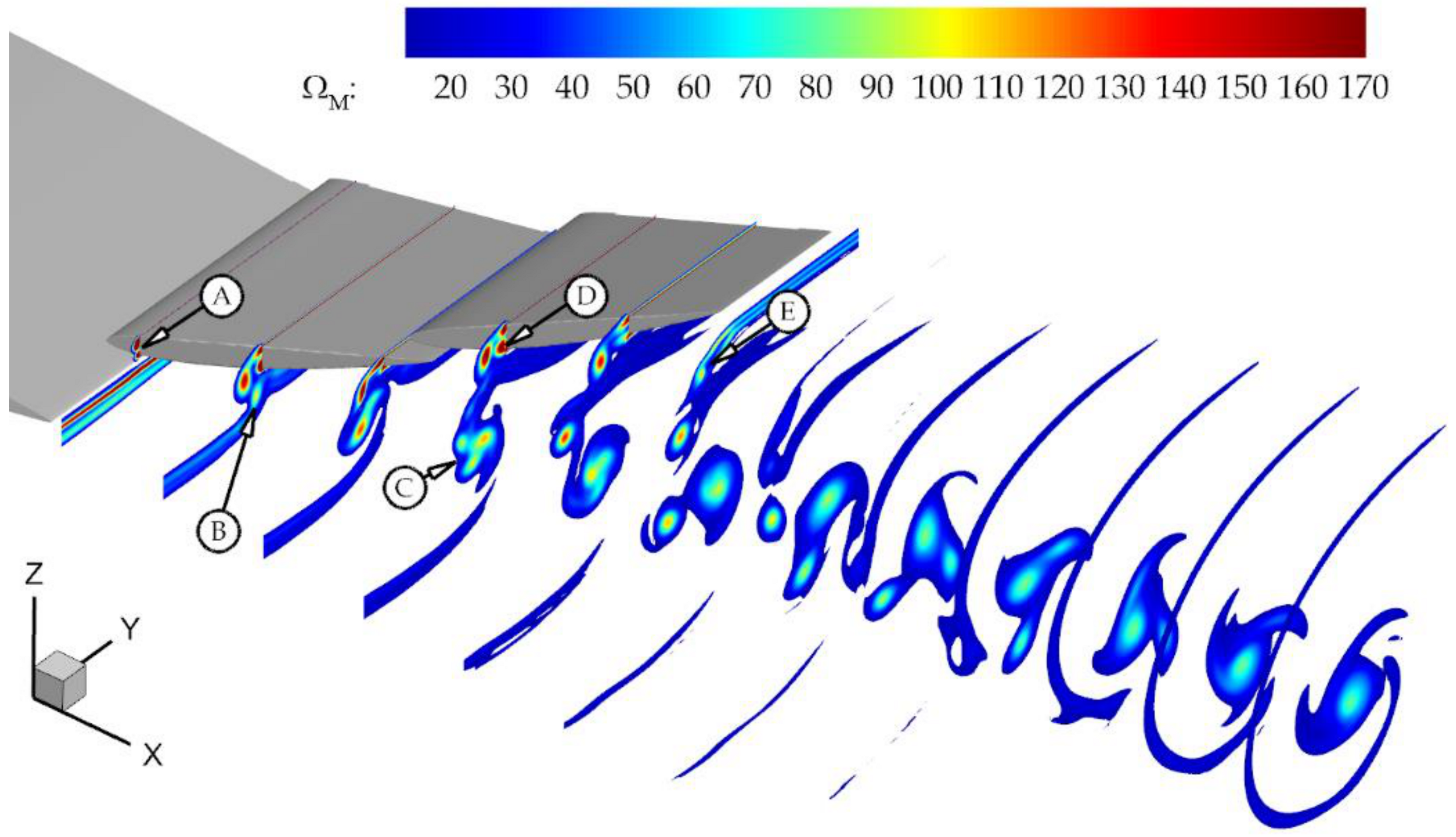
4.4.1. Formation of the Trailing Vortex System
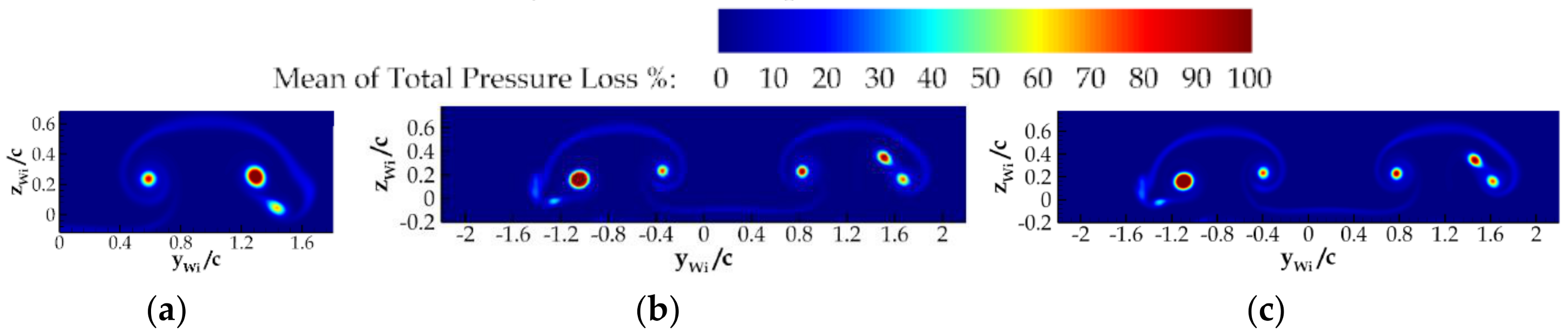
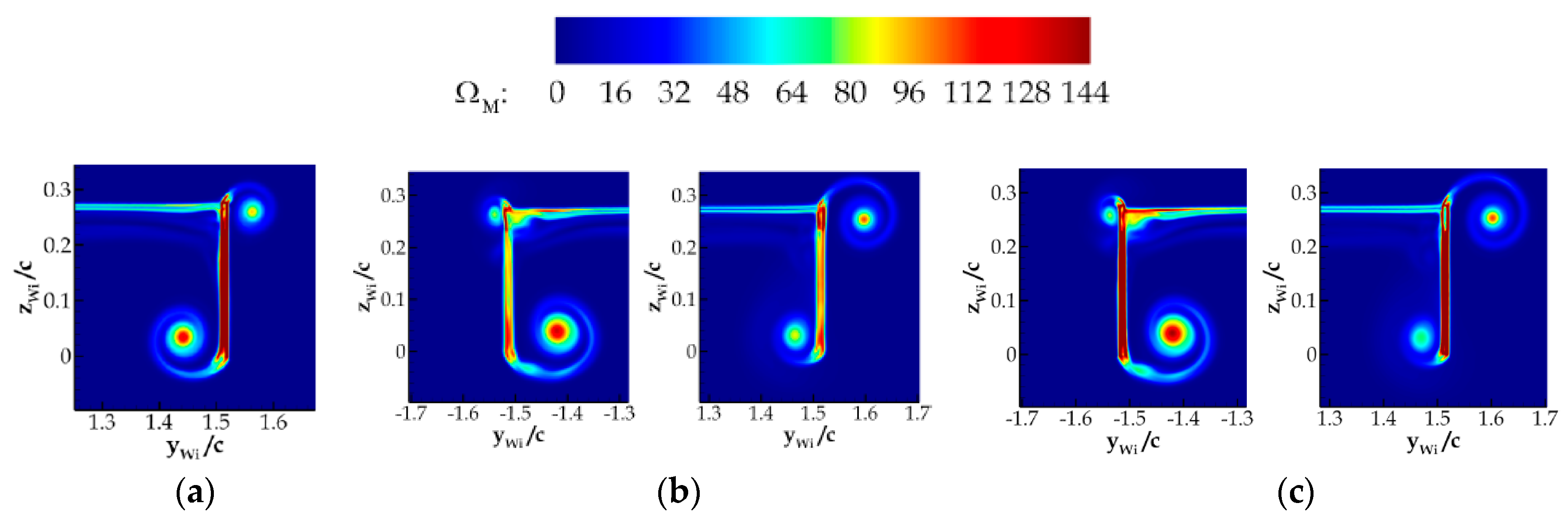
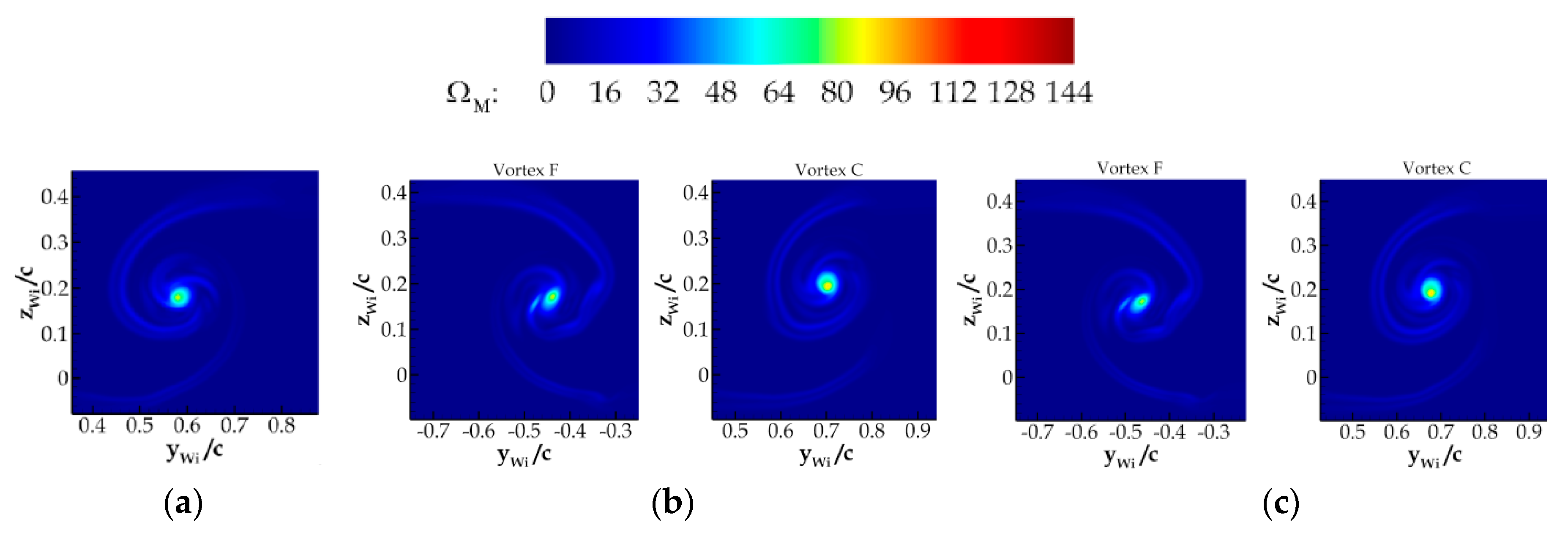
4.4.2. Initial Vortex Strengths, Dimensions & Positioning
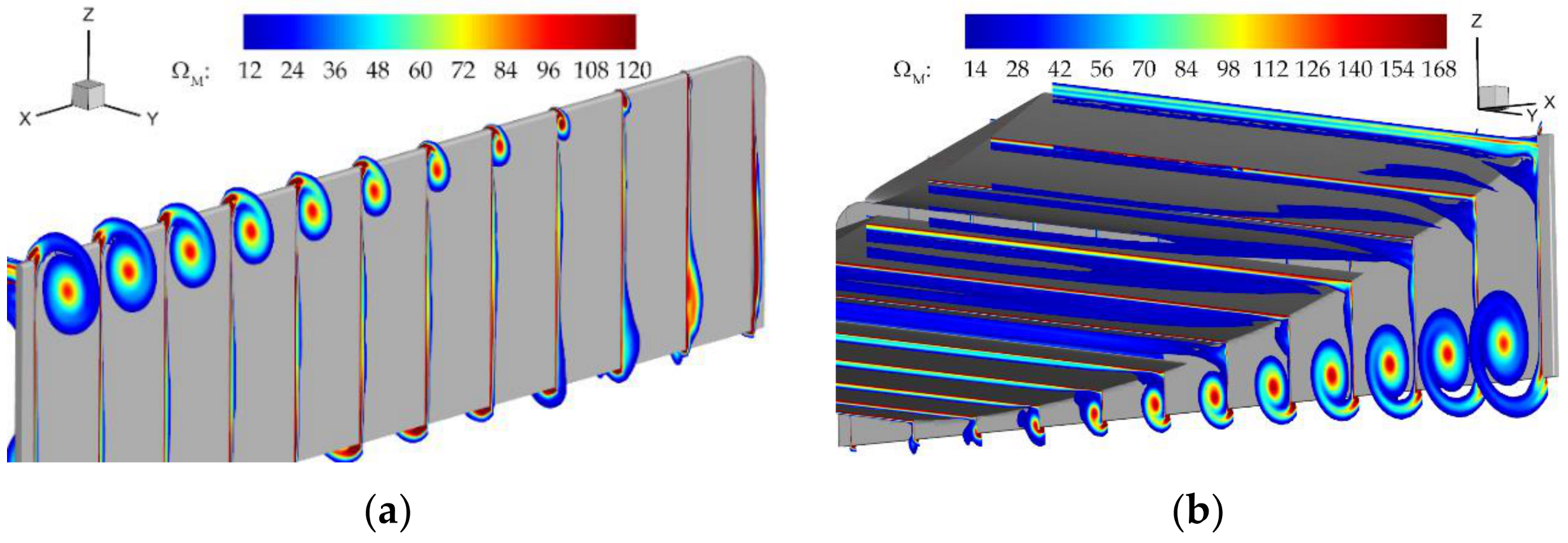
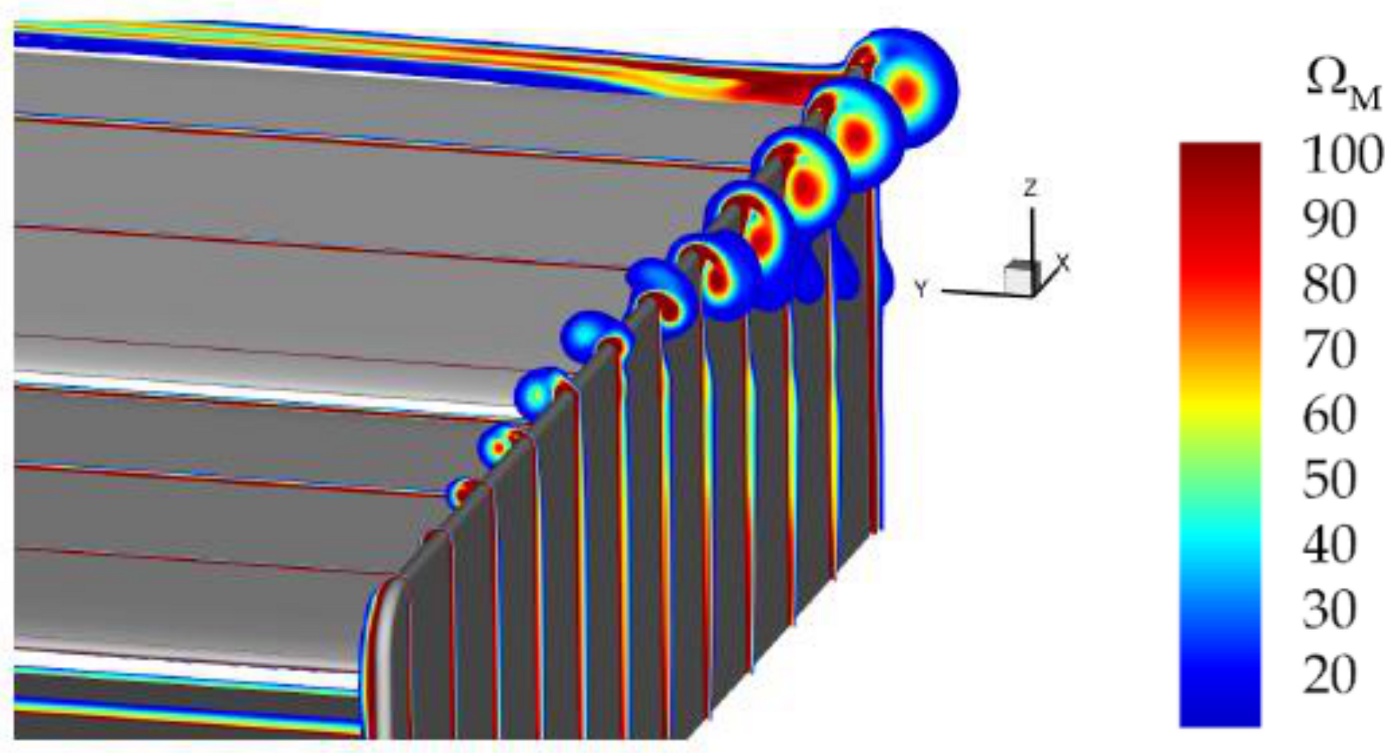
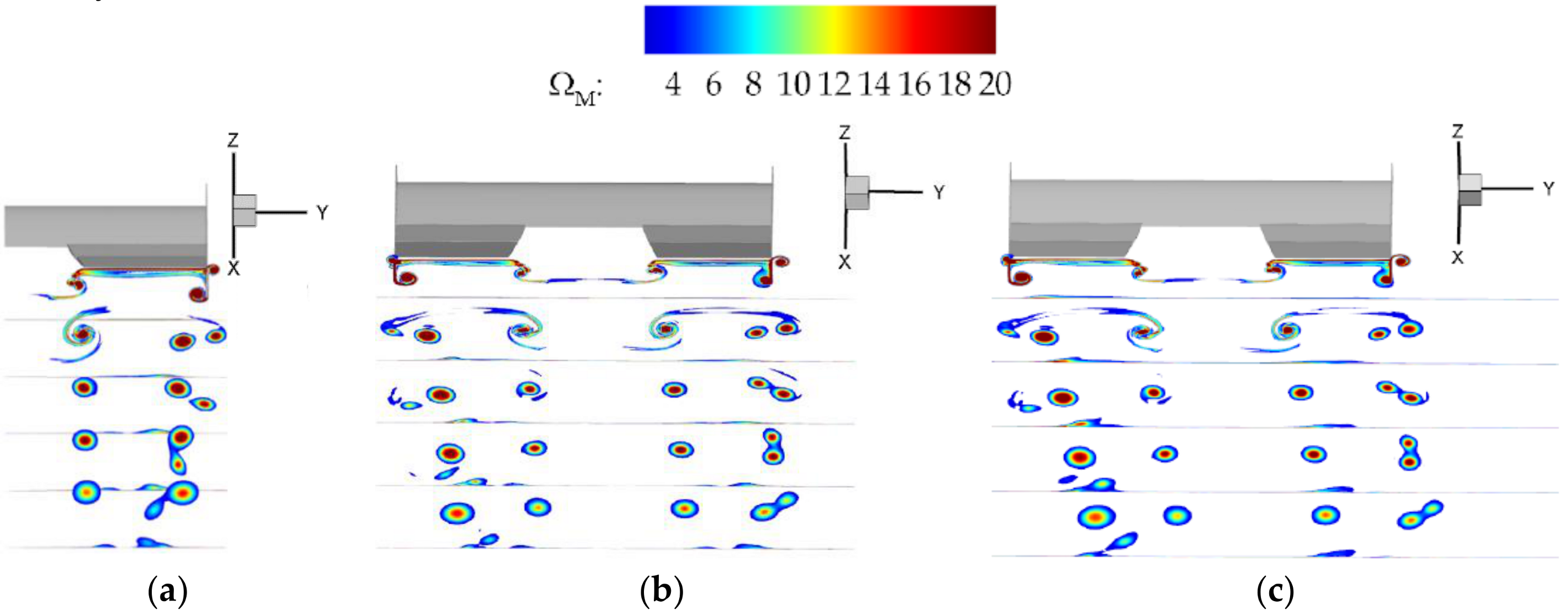
4.4.3. Downstream Behaviour
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Toet, W. Aerodynamics and aerodynamic research in Formula 1. Aeronaut. J. 2013, 117, 1–26. [Google Scholar] [CrossRef]
- Zerihan, J.; Zhang, X. Aerodynamics of a Single Element Wing in Ground Effect. J. Aircr. 2000, 37, 1058–1064. [Google Scholar] [CrossRef]
- Ranzenbach, R.; Barlow, J.B. Two-Dimensional Airfoil in Ground Effect, An Experimental and Computational Study. SAE Tech. Pap. Ser. 1994, 942509. [Google Scholar] [CrossRef]
- Agathangelou, B.; Gascoyne, M. Aerodynamic Design Considerations of a Formula 1 Racing Car. SAE Tech. Pap. Ser. 1998, 980399. [Google Scholar] [CrossRef]
- Zhang, X.; Toet, W.; Zerihan, J. Ground Effect Aerodynamics of Race Cars. Appl. Mech. Rev. 2006, 59, 33–49. [Google Scholar] [CrossRef] [Green Version]
- Wright, P.; Matthews, T. Formula 1 Technology. In Formula 1 Technology; SAE International: Warrendale, PA, USA, 2001. [Google Scholar]
- Keogh, J.; Doig, G.; Barber, T.; Diasinos, S. The Aerodynamics of a Cornering Inverted Wing in Ground Effect. Appl. Mech. Mater. 2014, 553, 205–210. [Google Scholar] [CrossRef] [Green Version]
- Keogh, J.; Doig, G.; Diasinos, S.; Barber, T. The influence of cornering on the vortical wake structures of an inverted wing. Proc. Inst. Mech. Eng. Part D: J. Automob. Eng. 2015, 229, 1817–1829. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Zerihan, J. Aerodynamics of a Double-Element Wing in Ground Effect. AIAA J. 2003, 41, 1007–1016. [Google Scholar] [CrossRef] [Green Version]
- Ranzenbach, R.; Barlow, J. Cambered Airfoil in Ground Effect—An Experimental and Computational Study. SAE Tech. Pap. Ser. 1996, 960909. [Google Scholar] [CrossRef]
- Marshall, D.; Newman, S.; Williams, C. Boundary layer effects on a wing in ground-effect. Aircr. Eng. Aerosp. Technol. 2010, 82, 99–106. [Google Scholar] [CrossRef]
- Zhang, X.; Zerihan, J. Off-Surface Aerodynamic Measurements of a Wing in Ground Effect. J. Aircr. 2003, 40, 716–725. [Google Scholar] [CrossRef]
- Soso, M.; Wilson, P.A. Investigating Changes to the Downforce Curve of a Double Element Airfoil in Ground Effect. SAE Tech. Pap. Ser. 2004. [Google Scholar] [CrossRef]
- 7th International symposium on applications of laser techniques to fluid mechanics. Int. J. Multiph. Flow 1994, 20. [CrossRef]
- Zhang, X.; Zerihan, J. Edge Vortices of a Double Element Wing in Ground Effect. J. Aircr. 2004, 41, 1127–1137. [Google Scholar] [CrossRef]
- Roberts, L.S.; Finnis, M.V.; Knowles, K.; Correia, J. Aerodynamic characteristics of a wing-and-flap configuration in ground effect and yaw. Proc. Inst. Mech. Eng. Part D: J. Automob. Eng. 2015, 230, 841–854. [Google Scholar] [CrossRef]
- Johl, G.S. The Design and Performance of a 1.9 m × 1.3 m Indraft Wind Tunnel. Ph.D. Thesis, Loughborough University, Loughborough, UK, 2010. [Google Scholar]
- Newnham, P.S. The Influence of Turbulence on the Aerodynamic Optimisation of Bluff Body Road Vehicles. Ph.D. Thesis, Loughborough University, Loughborough, UK, 2007. [Google Scholar]
- Siemens STAR-CCM+. User Guide V13.02; Siemens: Munich, Germany, 2018. [Google Scholar]
- Keogh, J.; Barber, T.J.; Diasinos, S.; Doig, G. Techniques for Aerodynamic Analysis of Cornering Vehicles. SAE Tech. Pap. Ser. 2015. [Google Scholar] [CrossRef]
- Wilson, J. Will a Moving Reference Frame (MRF) approach give a time-accurate flow solution? Siemens STAR-CCM+ Steve Portal 2018. Article No. 22106. [Google Scholar]
- Keogh, J. The Aerodynamic Effects of the Cornering Flow Conditions. Ph.D. Thesis, The University of New South Wales, Sidney, Australia, 2016. [Google Scholar]
- Josefsson, E.; Hagvall, R.; Urquhart, M.; Sebben, S. Numerical Analysis of Aerodynamic Impact on Passenger Vehicles during Cornering. SAE Tech. Pap. Ser. 2018. [Google Scholar] [CrossRef] [Green Version]
- Smith, A.M.O. High-Lift Aerodynamics. J. Aircr. 1975, 12, 501–530. [Google Scholar] [CrossRef] [Green Version]
- Van den Berg, M.A. Aerodynamic Interaction between a Inverted Wing with a Rotating Wheel. Ph.D. Thesis, University of Southampton, Faculty of Engineering and Applied Science, School of Engineering Sciences, Southampton, UK, 2007. [Google Scholar]
- Trieling, R.R.; Fuentes, O.U.V.; Van Heijst, G.J.F. Interaction of two unequal corotating vortices. Phys. Fluids 2005, 17, 87103. [Google Scholar] [CrossRef] [Green Version]
- Delery, J.M. Aspects of vortex breakdown. Prog. Aerosp. Sci. 1994, 30, 1–59. [Google Scholar] [CrossRef]
- Meunier, P.; Le Dizès, S.; Leweke, T. Physics of vortex merging. Comptes Rendus Phys. 2005, 6, 431–450. [Google Scholar] [CrossRef] [Green Version]
- Ceretelli, C.; Williamson, C.H.K. The physical mechanism for vortex merging. J. Fluid Mech. 2003, 475, 41–47. [Google Scholar] [CrossRef]
- Harvey, J.K.; Perry, F.J. Flowfield produced by trailing vortices in the vicinity of the ground. AIAA J. 1971, 9, 1659–1660. [Google Scholar] [CrossRef]
- Leweke, T.; Le Dizès, S.; Williamson, C.H. Dynamics and Instabilities of Vortex Pairs. Annu. Rev. Fluid Mech. 2016, 48, 507–541. [Google Scholar] [CrossRef] [Green Version]
- Batchelor, G.K. An Introduction to Fluid Dynamics; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Evaluation Method | CLWiA (m2) | CDWiA (m2) | |CLWiA|/CDWiA |
|---|---|---|---|
| Numerical | −0.169 | 0.026 | 6.500 |
| Experimental | −0.164 | 0.027 | 6.074 |
| Operating Condition | CLWiA (m2) | CDWiA (m2) | CSWiA (m2) | |CLWiA|/CDWiA |
|---|---|---|---|---|
| Straight-line | −0.808 | 0.100 | - | 8.080 |
| Cornering | −0.805 | 0.105 | 0.030 | 7.667 |
| Fixed Yaw | −0.804 | 0.099 | 0.045 | 8.121 |
| Fixed Yaw (WA) | −0.804 | 0.105 | 0.029 | 7.657 |
| Operating Condition | Vortex A | Vortex B | Vortex D | Vortex E |
|---|---|---|---|---|
| Cornering | +16% | −34% | −13% | +5% |
| Fixed Yaw | +17% | −43% | −9% | +12% |
| Operating Condition | Vortex C | Vortex F |
|---|---|---|
| Cornering | +11% | −2% |
| Fixed Yaw | +10% | +1% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Patel, D.; Garmory, A.; Passmore, M. The Effect of Cornering on the Aerodynamics of a Multi-Element Wing in Ground Effect. Fluids 2021, 6, 3. https://doi.org/10.3390/fluids6010003
Patel D, Garmory A, Passmore M. The Effect of Cornering on the Aerodynamics of a Multi-Element Wing in Ground Effect. Fluids. 2021; 6(1):3. https://doi.org/10.3390/fluids6010003
Chicago/Turabian StylePatel, Dipesh, Andrew Garmory, and Martin Passmore. 2021. "The Effect of Cornering on the Aerodynamics of a Multi-Element Wing in Ground Effect" Fluids 6, no. 1: 3. https://doi.org/10.3390/fluids6010003
APA StylePatel, D., Garmory, A., & Passmore, M. (2021). The Effect of Cornering on the Aerodynamics of a Multi-Element Wing in Ground Effect. Fluids, 6(1), 3. https://doi.org/10.3390/fluids6010003