
A Hybrid Parallel Numerical Model for Wave-Induced Free-Surface Flow

 , , and
, , and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Methodology
2.2. Parallel Implementation
2.3. Parallelization of the Pressure Solution
3. Results
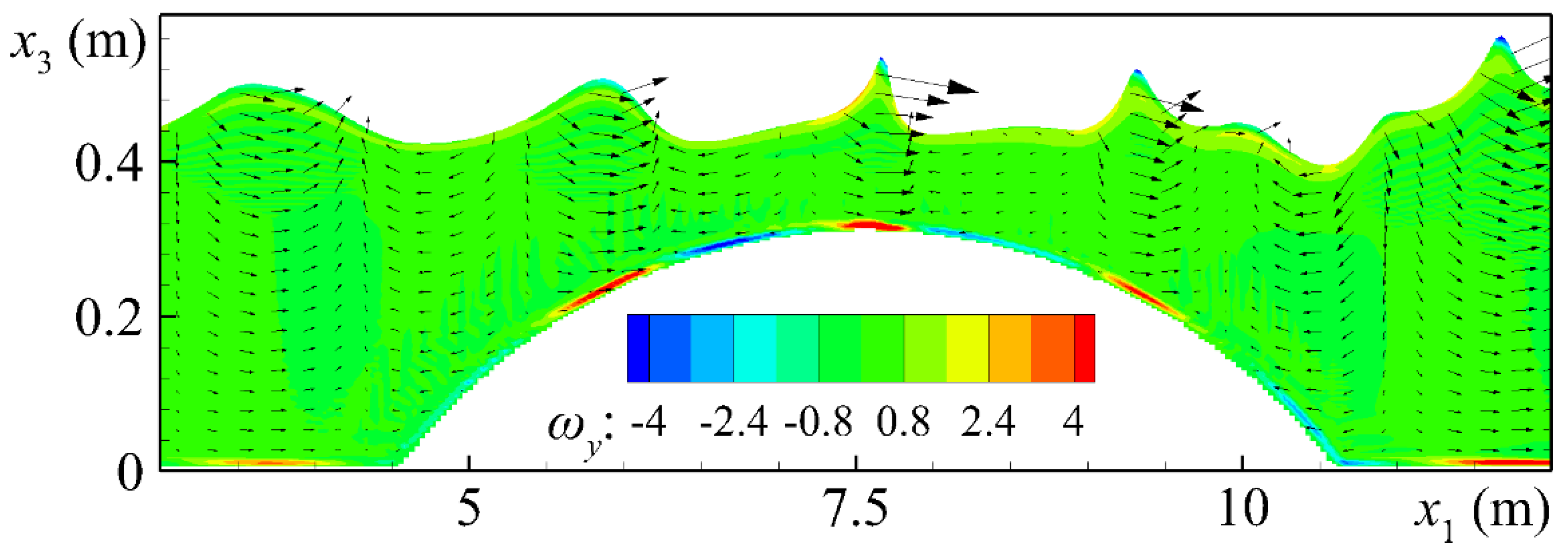
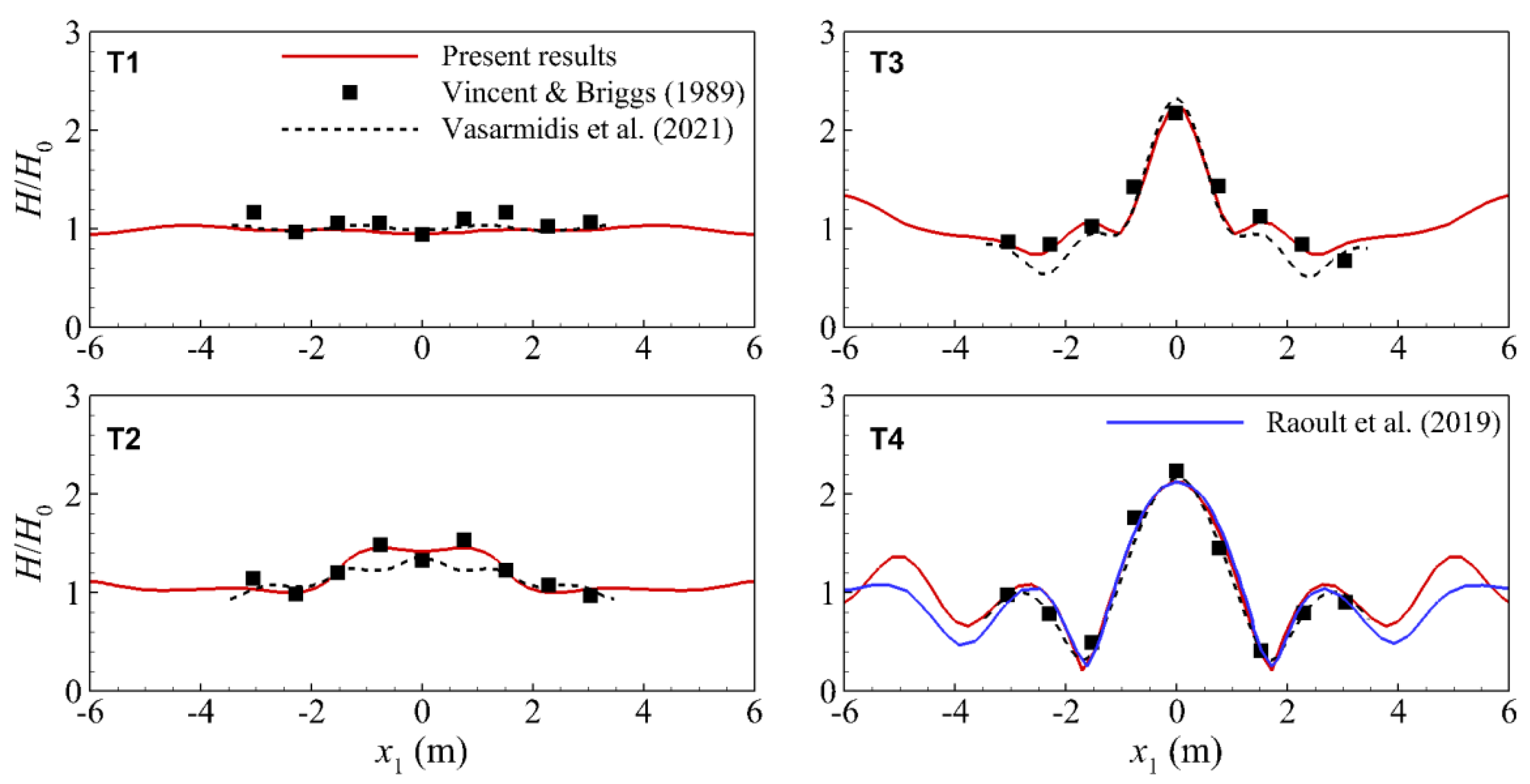
3.1. Waves Propagation over an Elliptical Shoal
3.2. Performance Analysis of the Presented Code
3.2.1. Profiling
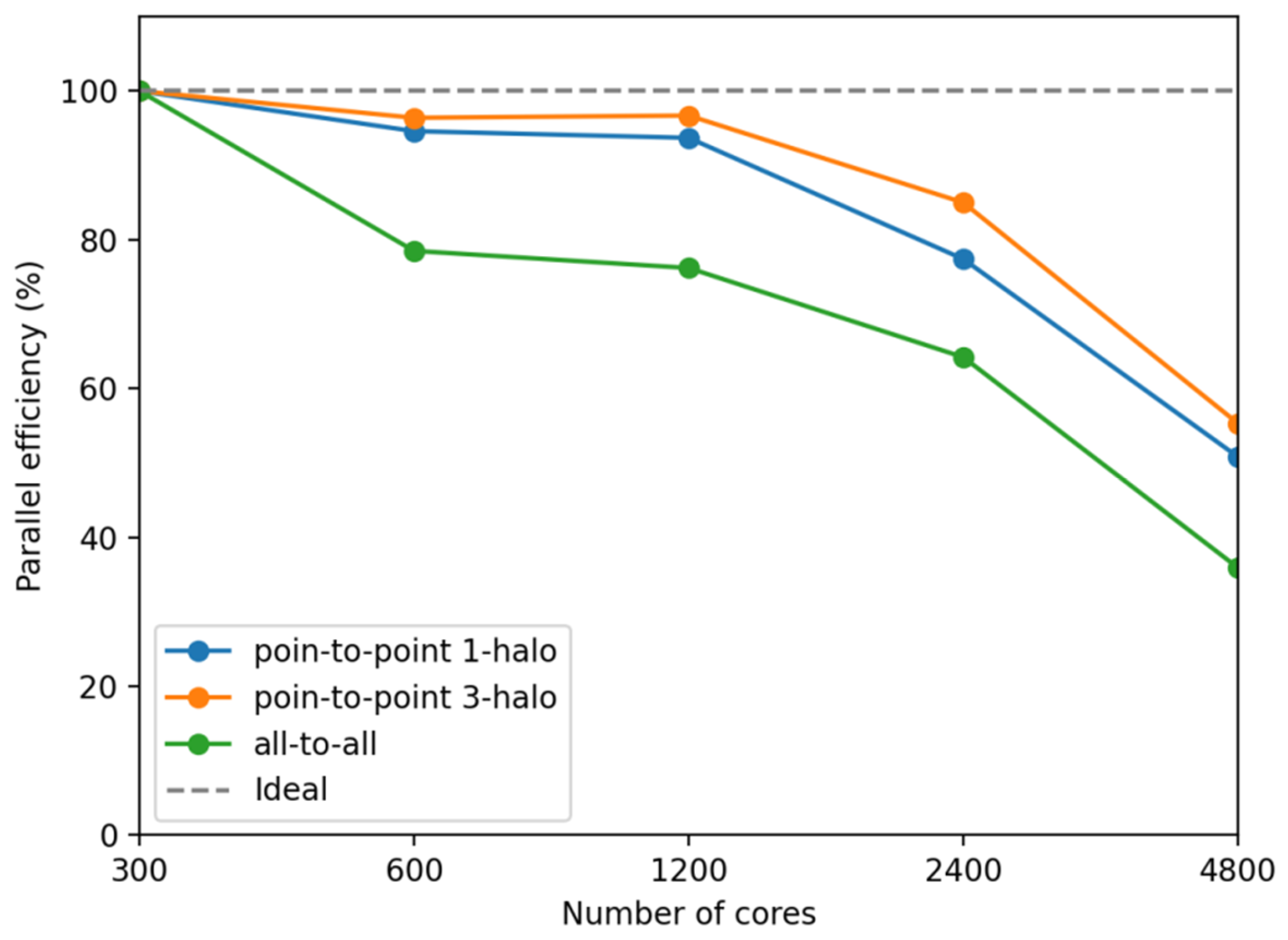
3.2.2. Parallel Efficiency of the Main Communication Patterns
3.2.3. Strong Scaling of the Presented Code
4. Discussion and Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Karambas, T.V.; Memos, C.D. Boussinesq model for weakly nonlinear fully dispersive water waves. J. Waterw. Port Coast. Ocean Eng. 2009, 135, 187–199. [Google Scholar] [CrossRef]
- Shi, F.; Kirby, J.T.; Harris, J.C.; Geiman, J.D.; Grilli, S.T. A high-order adaptive time-stepping TVD solver for Boussinesq modeling of breaking waves and coastal inundation. Ocean Model. 2012, 43–44, 36–51. [Google Scholar] [CrossRef]
- Kirby, J.T. Boussinesq models and their application to coastal processes across a wide range of scales. J. Waterw. Port Coast. Ocean Eng. 2016, 142, 03116005. [Google Scholar] [CrossRef]
- Zijlema, M.; Stelling, G.; Smit, P. SWASH: An operational public domain code for simulating wave fields and rapidly varied flows in coastal waters. Coast. Eng. 2011, 58, 992–1012. [Google Scholar] [CrossRef]
- Yamazaki, Y.; Cheung, K.F.; Kowalik, Z. Depth-integrated, non-hydrostatic model with grid nesting for tsunami generation, propagation, and run-up. Int. J. Numer. Methods Fluids 2011, 67, 2081–2107. [Google Scholar] [CrossRef]
- Bai, Y.; Cheung, K.F. Depth-integrated free-surface flow with a two-layer non-hydrostatic formulation. Int. J. Numer. Methods Fluids 2012, 69, 411–429. [Google Scholar] [CrossRef]
- Wei, Z.; Jia, Y. Simulation of nearshore wave processes by a depth-integrated non-hydrostatic finite element model. Coast. Eng. 2014, 83, 93–107. [Google Scholar] [CrossRef]
- Bai, Y.; Yamazaki, Y.; Cheung, K.F. Convergence of multilayer nonhydrostatic models in Relation to Boussinesq-type equations. J. Waterw. Port Coast. Ocean Eng. 2018, 144, 06018001. [Google Scholar] [CrossRef]
- Smagorinsky, J. General circulation experiments with the primitive equations I. The basic experiment. Mon. Weather Rev. 1963, 91, 99–165. [Google Scholar] [CrossRef]
- Önder, A.; Yuan, J. Turbulent dynamics of sinusoidal oscillatory flow over a wavy bottom. J. Fluid Mech. 2019, 858, 264–314. [Google Scholar] [CrossRef]
- Oyarzun, A.G.; Chalmoukis, I.A.; Leftheriotis, G.A.; Dimas, A.A. A GPU-based algorithm for efficient LES of high Reynolds number flows in heterogeneous CPU/GPU supercomputers. Appl. Math. Model. 2020, 85, 141–156. [Google Scholar] [CrossRef]
- Jin, C.; Coco, G.; Tinoco, R.O.; Ranjan, P.; San Juan, J.; Dutta, S.; Friedrich, H.; Gong, Z. Large eddy simulation of three-dimensional flow structures over wave-generated ripples. Earth Surf. Process. Landf. 2021, 1–13. [Google Scholar] [CrossRef]
- Frantzis, C.; Grigoriadis, D.G. An efficient method for two-fluid incompressible flows appropriate for the immersed boundary method. J. Comput. Phys. 2019, 376, 28–53. [Google Scholar] [CrossRef]
- De Vita, F.; De Lillo, F.; Verzicco, R.; Onorato, M. A fully Eulerian solver for the simulation of multiphase flows with solid bodies: Application to surface gravity waves. J. Comput. Phys. 2021, 438, 110355. [Google Scholar] [CrossRef]
- Dodd, M.S.; Ferrante, A. A fast pressure-correction method for incompressible two-fluid flows. J. Comput. Phys. 2014, 273, 416–434. [Google Scholar] [CrossRef]
- Dimas, A.A.; Chalmoukis, I.A. An adaptation of the immersed boundary method for turbulent flows over three-dimensional coastal/fluvial beds. Appl. Math. Model. 2020, 88, 905–915. [Google Scholar] [CrossRef]
- Sethian, J.A.; Smereka, P. Level set methods for fluid interfaces. Annu. Rev. Fluid Mech. 2003, 35, 341–372. [Google Scholar] [CrossRef] [Green Version]
- Dimas, A.A.; Koutrouveli, T.I. Wave height dissipation and undertow of spilling breakers over beach of varying slope. J. Waterw. Port Coast. Ocean Eng. 2019, 145, 04019016. [Google Scholar] [CrossRef]
- Jacobsen, N.G.; Fuhrman, R.; Fredsøe, J. A wave generation toolbox for the open-source CFD library: OpenFoam®. Int. J. Num. Methods Fluids 2012, 70, 1073–1088. [Google Scholar] [CrossRef]
- Koutrouveli, T.I.; Dimas, A.A. Wave and hydrodynamic processes in the vicinity of a rubble-mound, permeable, zero-freeboard breakwater. J. Mar. Sci. Eng. 2020, 8, 206. [Google Scholar] [CrossRef] [Green Version]
- Oyarzun, G.; Borrell, R.; Gorobets, A.; Lehmkuhl, O.; Oliva, A. Direct numerical simulation of incompressible flows on unstructured meshes using hybrid CPU/GPU supercomputers. Procedia Eng. 2013, 61, 87–93. [Google Scholar] [CrossRef] [Green Version]
- Borrell, R.; Dosimont, D.; Garcia-Gasulla, M.; Houzeaux, G.; Lehmkuhl, O.; Mehta, V.; Owen, H.; Vázquez, M.; Oyarzun, G. Heterogeneous CPU/GPU co-execution of CFD simulations on the POWER9 architecture: Application to airplane aerody-namics. Future Gener. Comput. Syst. 2020, 107, 31–48. [Google Scholar] [CrossRef]
- Briggs, M.J. Summary of WET Shoal Results, Memorandum for Records; Coastal Engineering Research Center, Waterways Experiment Station: Vicksburg, MS, USA, 1987. [Google Scholar]
- Vincent, L.; Briggs, M.J. Refraction—Diffraction of Irregular Waves over a Mound. J. Waterw. Port Coast. Ocean Eng. 1989, 115, 269–284. [Google Scholar] [CrossRef]
- Kang, L.; Guo, X. Depth-integrated, non-hydrostatic model using a new alternating direction implicit scheme. J. Hydr. Res. 2013, 51, 368–379. [Google Scholar] [CrossRef]
- Fang, Z.; Liu, Z.; Zou, Z. Efficient computation of coastal waves using a depth-integrated, non-hydrostatic model. Coast. Eng. 2015, 97, 21–36. [Google Scholar] [CrossRef]
- Vasarmidis, P.; Stratigaki, V.; Suzuki, T.; Zijlema, M.; Troch, P. On the accuracy of internal wave generation method in a non-hydrostatic wave model to generate and absorb dispersive and directional waves. Ocean Eng. 2021, 219, 108303. [Google Scholar] [CrossRef]
- Viviano, A.; Musumeci, R.E.; Foti, E. A nonlinear rotational, quasi-2DH, numerical model for spilling wave propagation. Appl. Math. Model. 2015, 39, 1099–1118. [Google Scholar] [CrossRef]
- Ha, T.; Lin, P.; Cho, Y.S. Generation of 3D regular and irregular waves using Navier-Stokes equations model with an internal wave maker. Coast. Eng. 2013, 76, 55–67. [Google Scholar] [CrossRef]
- Raoult, C.; Benoit, M.; Yatesa, M.L. Development and validation of a 3D RBF-spectral model for coastal wave simulation. J. Comp. Phys. 2019, 378, 278–302. [Google Scholar] [CrossRef]
- Berkhoff, J.C.W.; Booy, N.; Radder, A.C. Verification of numerical wave propagation models for simple harmonic linear water waves. Coast. Eng. 1982, 6, 255–279. [Google Scholar] [CrossRef]
- Choi, J.; Lim, C.H.; Lee, J.I.; Yoon, S.B. Evolution of waves and currents over a submerged laboratory shoal. Coast. Eng. 2009, 56, 297–312. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1. | Computation of the intermediate velocity field; |
| 2. | Implementation of the IB method (no-slip condition); |
| 3. | Computation of the pressure field—Equation (4); |
| 4. | Computation of the final velocity field—Equation (3); |
| 5. | Computation of the evolution of the free surface—Equation (5). |
| Test Case | Wave Height, H0 (cm) | Wave Period, T (s) |
|---|---|---|
| C1 | 5.50 | 1.3 |
| C2 | 7.75 | 1.3 |
| RMSE (%) | Test Case C1 | Test Case C2 |
|---|---|---|
| T1 | 9.76 | 6.73 |
| T2 | 5.28 | 8.04 |
| T3 | 7.44 | 22.6 |
| T4 | 9.41 | 20.2 |
| Stage of the Algorithm | Relative Weight | |
|---|---|---|
| 1. | Computation of the intermediate velocity field; | 0.73% |
| 2. | Implementation of the IB method (no-slip condition); | 0.37% |
| 3. | Computation of the pressure field—Equation (4); | 98.19% |
| 4. | Computation of the final velocity field—Equation (3); | 0.17% |
| 5. | Computation of the evolution of the free surface—Equation (5). | 0.54% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leftheriotis, G.A.; Chalmoukis, I.A.; Oyarzun, G.; Dimas, A.A. A Hybrid Parallel Numerical Model for Wave-Induced Free-Surface Flow. Fluids 2021, 6, 350. https://doi.org/10.3390/fluids6100350
Leftheriotis GA, Chalmoukis IA, Oyarzun G, Dimas AA. A Hybrid Parallel Numerical Model for Wave-Induced Free-Surface Flow. Fluids. 2021; 6(10):350. https://doi.org/10.3390/fluids6100350
Chicago/Turabian StyleLeftheriotis, Georgios A., Iason A. Chalmoukis, Guillermo Oyarzun, and Athanassios A. Dimas. 2021. "A Hybrid Parallel Numerical Model for Wave-Induced Free-Surface Flow" Fluids 6, no. 10: 350. https://doi.org/10.3390/fluids6100350
APA StyleLeftheriotis, G. A., Chalmoukis, I. A., Oyarzun, G., & Dimas, A. A. (2021). A Hybrid Parallel Numerical Model for Wave-Induced Free-Surface Flow. Fluids, 6(10), 350. https://doi.org/10.3390/fluids6100350