
Characterising Momentum Flux Events in High Reynolds Number Turbulent Boundary Layers


Abstract
:1. Introduction and Motivation
Townsend’s Attached Eddy Hypothesis
2. ZPG TBL Datasets
3. Effect of Reτ
3.1. Conditional Sampling
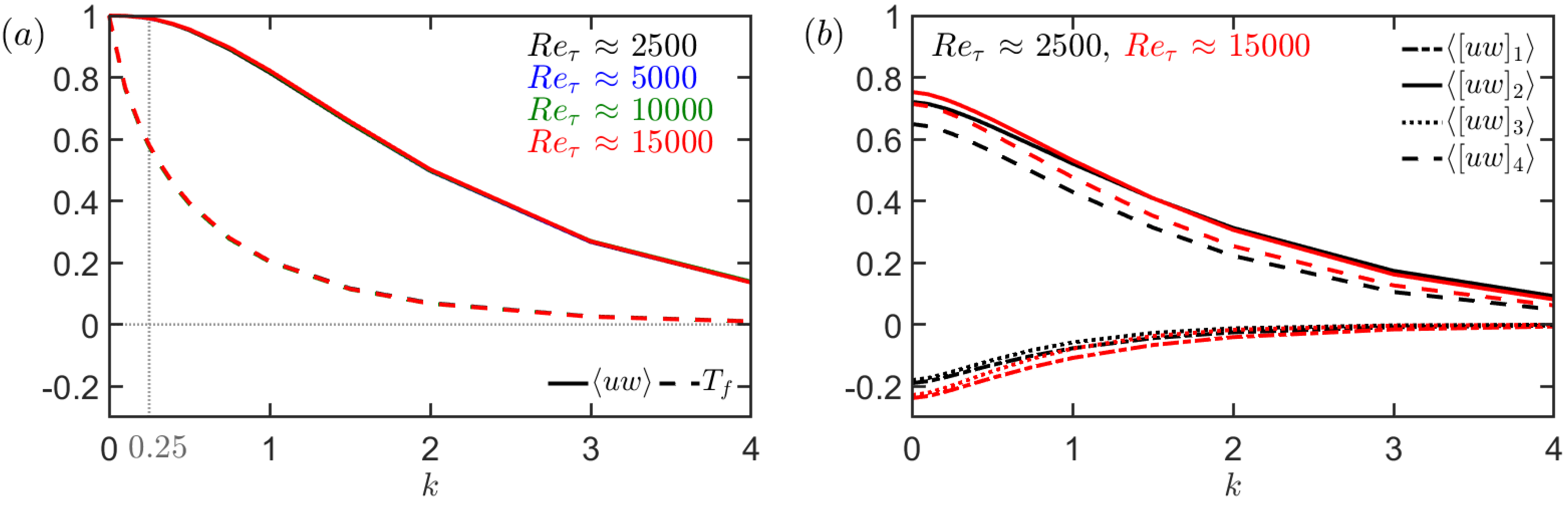
- Criterion 2 is used to identify the fraction of the time series signal with flux magnitude beyond a pre-defined threshold, and it is given as per [10,20]:If suppose N samples of the time series (expressed as , with j = 1–N) are found to conform to the condition in (7) for a particular threshold k, then the fractional contribution to the mean flux from these N(k) samples may be defined asand the fractional cumulative time duration ((k)) for which the flux signal crosses the threshold is given by
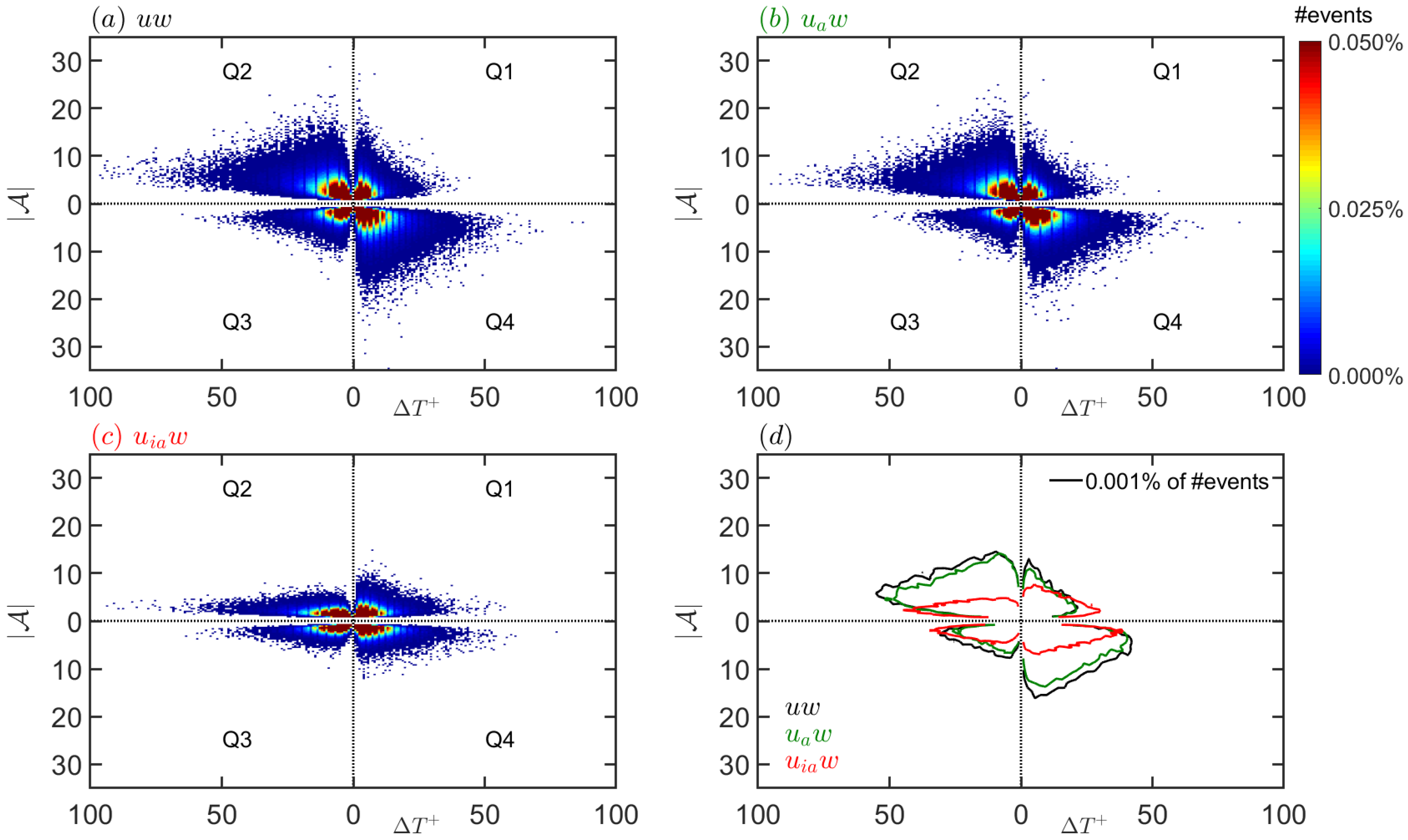
3.2. Episodic Description
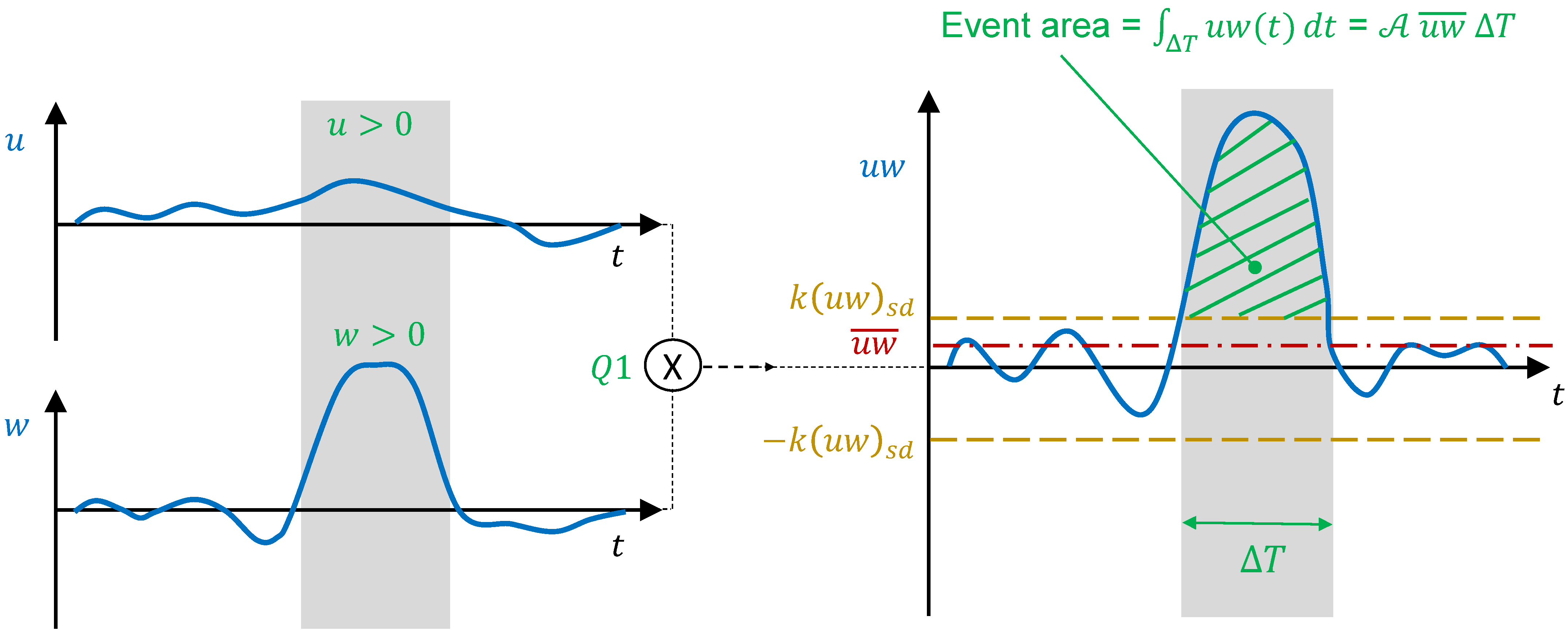
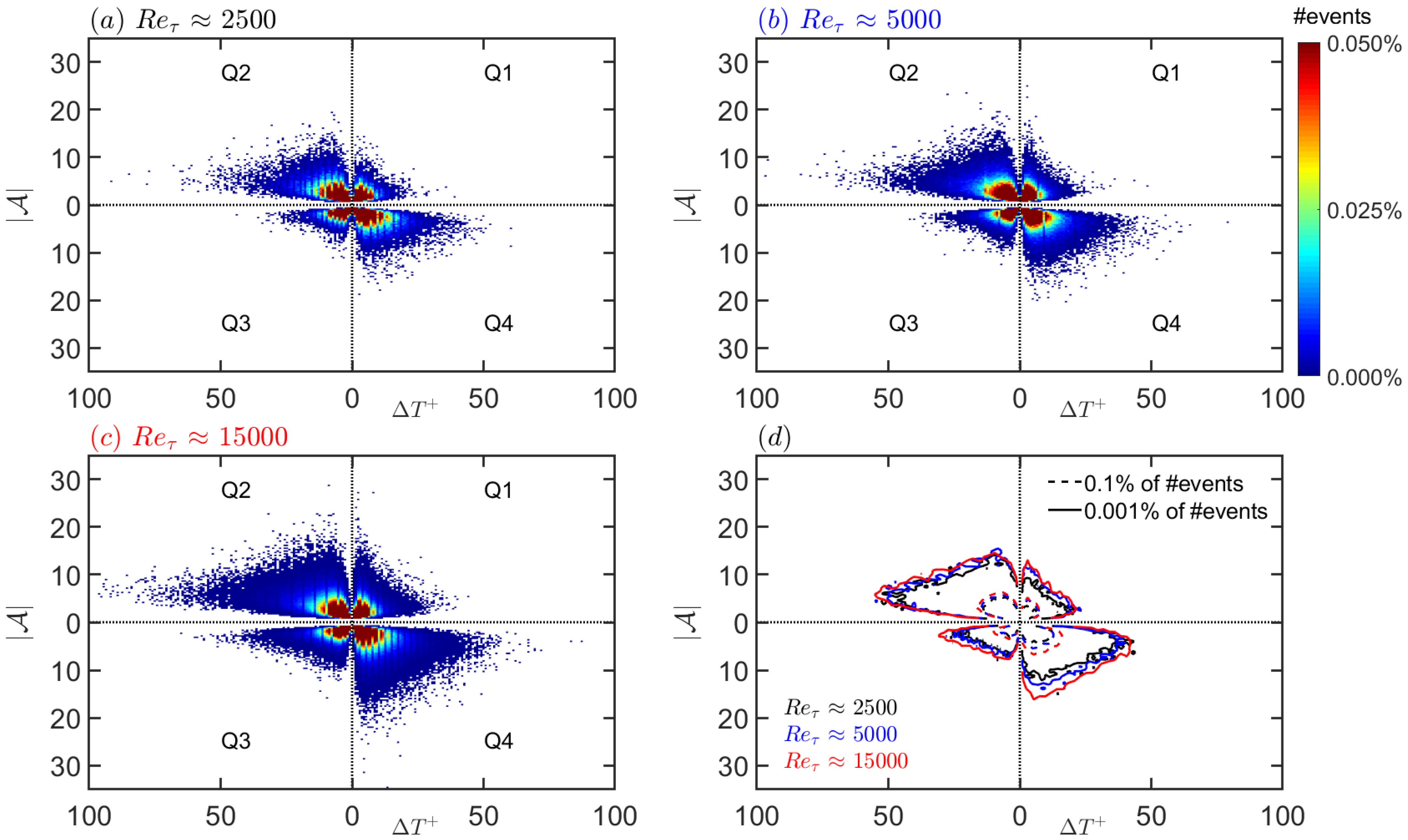
- Event type: For each event identified in the flux time series, the sign of the u and w samples at the corresponding instants is used to assign a particular quadrant (Q1–Q4) to which the event belongs.
- Event duration (): This refers to the time interval associated with the identified event and is expressed as .
- Event amplitude (): It is defined as , with essentially being the ratio of the average momentum flux over (obtained by computing the occupied area) to the mean momentum flux.
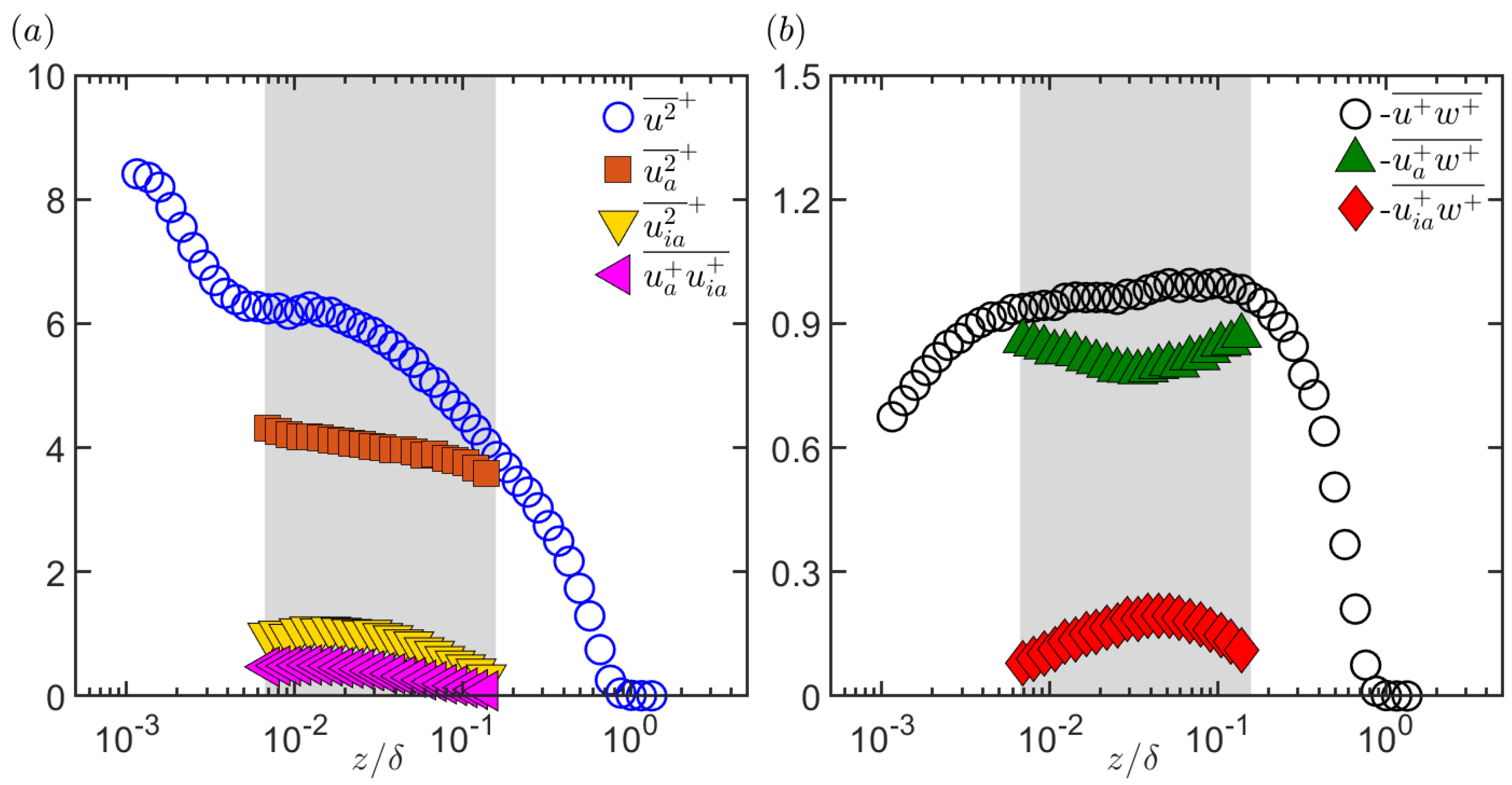
4. Active and Inactive Momentum Flux
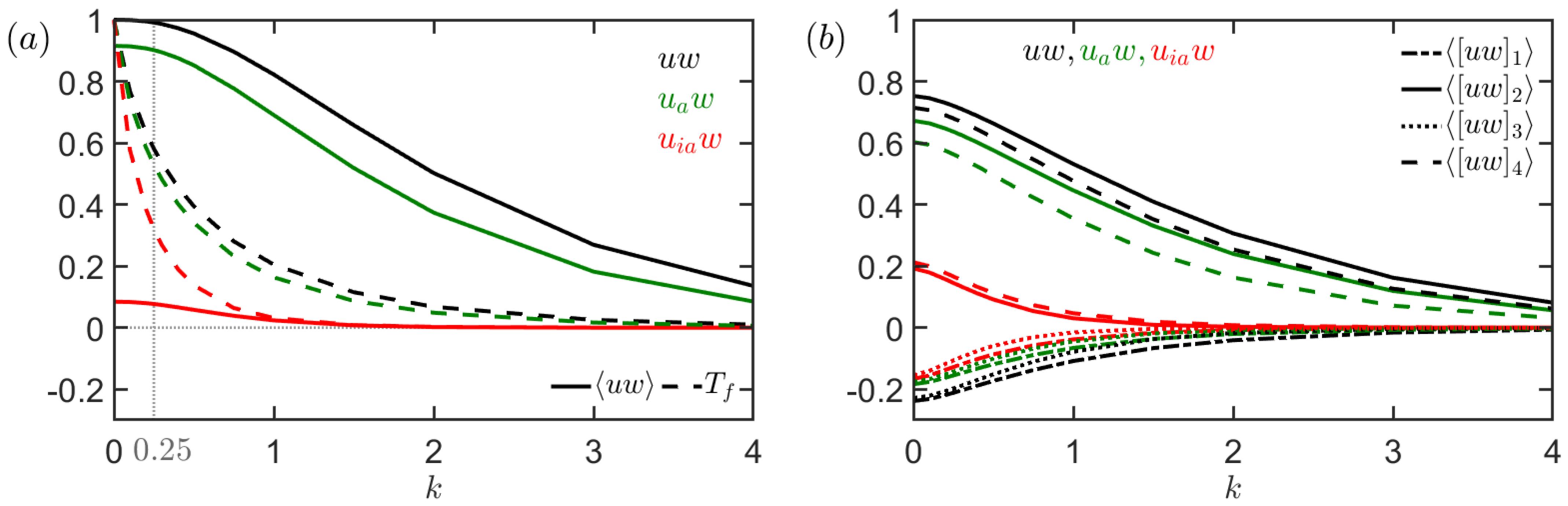
4.1. Estimating the Active and Inactive Flux Signal
4.2. Conditional Sampling
4.3. Episodic Description
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ABL | atmospheric boundary layer |
| HRNBLWT | high Reynolds number boundary layer wind tunnel |
| PIV | particle image velocimetry |
| SLSE | spectral linear stochastic estimation |
| TBL | turbulent boundary layer |
| TKE | turbulent kinetic energy |
| ZPG | zero pressure gradient |
Appendix A. SLSE-Based Methodology to Decompose the Flux Time Series
References
- Corino, E.R.; Brodkey, R.S. A visual investigation of the wall region in turbulent flow. J. Fluid Mech. 1969, 37, 1–30. [Google Scholar] [CrossRef] [Green Version]
- Tennekes, H.; Lumley, J.L. A First Course in Turbulence; MIT Press: Cambridge, MA, USA, 1972. [Google Scholar]
- Lumley, J.L. Spectral energy budget in wall turbulence. Phys. Fluids 1964, 7, 190–196. [Google Scholar] [CrossRef]
- Domaradzki, J.A.; Liu, W.; Härtel, C.; Kleiser, L. Energy transfer in numerically simulated wall-bounded turbulent flows. Phys. Fluids 1994, 6, 1583–1599. [Google Scholar] [CrossRef]
- Mizuno, Y. Spectra of energy transport in turbulent channel flows for moderate Reynolds numbers. J. Fluid Mech. 2016, 805, 171. [Google Scholar] [CrossRef]
- Lee, M.; Moser, R.D. Spectral analysis of the budget equation in turbulent channel flows at high Reynolds number. J. Fluid Mech. 2019, 860, 886–938. [Google Scholar] [CrossRef] [Green Version]
- Robinson, S.K. Coherent motions in the turbulent boundary layer. Annu. Rev. Fluid Mech. 1991, 23, 601–639. [Google Scholar] [CrossRef]
- Kim, H.; Kline, S.J.; Reynolds, W. The production of turbulence near a smooth wall in a turbulent boundary layer. J. Fluid Mech. 1971, 50, 133–160. [Google Scholar] [CrossRef]
- Wallace, J.M.; Eckelmann, H.; Brodkey, R.S. The wall region in turbulent shear flow. J. Fluid Mech. 1972, 54, 39–48. [Google Scholar] [CrossRef]
- Willmarth, W.W.; Lu, S.S. Structure of the Reynolds stress near the wall. J. Fluid Mech. 1972, 55, 65–92. [Google Scholar] [CrossRef]
- Lu, S.S.; Willmarth, W.W. Measurements of the structure of the Reynolds stress in a turbulent boundary layer. J. Fluid Mech. 1973, 60, 481–511. [Google Scholar] [CrossRef]
- Willmarth, W.W.; Tu, B.J. Structure of turbulence in the boundary layer near the wall. Phys. Fluids 1967, 10, S134–S137. [Google Scholar] [CrossRef]
- Adrian, R.J.; Meinhart, C.D.; Tomkins, C.D. Vortex organization in the outer region of the turbulent boundary layer. J. Fluid Mech. 2000, 422, 1–54. [Google Scholar] [CrossRef] [Green Version]
- Ganapathisubramani, B.; Longmire, E.K.; Marusic, I. Characteristics of vortex packets in turbulent boundary layers. J. Fluid Mech. 2003, 478, 35–46. [Google Scholar] [CrossRef] [Green Version]
- Bogard, D.G.; Tiederman, W.G. Burst detection with single-point velocity measurements. J. Fluid Mech. 1986, 162, 389–413. [Google Scholar] [CrossRef]
- Luchik, T.S.; Tiederman, W.G. Timescale and structure of ejections and bursts in turbulent channel flows. J. Fluid Mech. 1987, 174, 529–552. [Google Scholar] [CrossRef]
- Tardu, S. Characteristics of single and clusters of bursting events in the inner layer. Exp. Fluids 1995, 20, 112–124. [Google Scholar]
- Wei, T.; Willmarth, W.W. Reynolds-number effects on the structure of a turbulent channel flow. J. Fluid Mech. 1989, 204, 57–95. [Google Scholar] [CrossRef]
- Narasimha, R.; Kailas, S.V. Turbulent bursts in the atmosphere. Atmos. Environ. Part A Gen. Top. 1990, 24, 1635–1645. [Google Scholar] [CrossRef]
- Narasimha, R.; Kumar, S.R.; Prabhu, A.; Kailas, S.V. Turbulent flux events in a nearly neutral atmospheric boundary layer. Philos. Trans. R. Soc. Math. Phys. Eng. Sci. 2007, 365, 841–858. [Google Scholar] [CrossRef]
- Townsend, A.A. Equilibrium layers and wall turbulence. J. Fluid Mech. 1961, 11, 97–120. [Google Scholar] [CrossRef]
- Townsend, A. The Structure of Turbulent Shear Flow, 2nd ed.; Cambridge University Press, Ed.; Cambridge University Press: Cambridge, UK, 1976. [Google Scholar]
- Cox, D.R.; Isham, V. Point Processes; CRC Press: Boca Raton, FL, USA, 1980; Volume 12. [Google Scholar]
- Marusic, I.; Chauhan, K.; Kulandaivelu, V.; Hutchins, N. Evolution of zero-pressure-gradient boundary layers from different tripping conditions. J. Fluid Mech. 2015, 783, 379–411. [Google Scholar] [CrossRef] [Green Version]
- Talluru, K.M.; Baidya, R.; Hutchins, N.; Marusic, I. Amplitude modulation of all three velocity components in turbulent boundary layers. J. Fluid Mech. 2014, 746. [Google Scholar] [CrossRef] [Green Version]
- Baidya, R.; Philip, J.; Hutchins, N.; Monty, J.P.; Marusic, I. Distance-from-the-wall scaling of turbulent motions in wall-bounded flows. Phys. Fluids 2017, 29, 020712. [Google Scholar] [CrossRef]
- Baidya, R.; Philip, J.; Hutchins, N.; Monty, J.P.; Marusic, I. Spanwise velocity statistics in high-Reynolds-number turbulent boundary layers. J. Fluid Mech. 2021, 913. [Google Scholar] [CrossRef]
- Marusic, I.; Mathis, R.; Hutchins, N. High Reynolds number effects in wall turbulence. Int. J. Heat Fluid Flow 2010, 31, 418–428. [Google Scholar] [CrossRef]
- Baidya, R. Multi-Component Velocity Measurements in Turbulent Boundary Layers. Ph.D. Thesis, Department of Mechanical and Manufacturing Engineering, University of Melbourne, Parkville, Australia, 2016. [Google Scholar]
- Baidya, R.; Philip, J.; Hutchins, N.; Monty, J.P.; Marusic, I. Spatial averaging effects on the streamwise and wall-normal velocity measurements in a wall-bounded turbulence using a cross-wire probe. Meas. Sci. Technol. 2019, 30, 085303. [Google Scholar] [CrossRef] [Green Version]
- Deshpande, R.; Monty, J.P.; Marusic, I. A scheme to correct the influence of calibration misalignment for cross-wire probes in turbulent shear flows. Exp. Fluids 2020, 61, 1–17. [Google Scholar] [CrossRef]
- Tinney, C.; Coiffet, F.; Delville, J.; Hall, A.; Jordan, P.; Glauser, M. On spectral linear stochastic estimation. Exp. Fluids 2006, 41, 763–775. [Google Scholar] [CrossRef]
- Baars, W.J.; Hutchins, N.; Marusic, I. Spectral stochastic estimation of high-Reynolds-number wall-bounded turbulence for a refined inner-outer interaction model. Phys. Rev. Fluids 2016, 1, 054406. [Google Scholar] [CrossRef]
- Baars, W.J.; Marusic, I. Data-driven decomposition of the streamwise turbulence kinetic energy in boundary layers. Part 2. Integrated energy and A1. J. Fluid Mech. 2020, 882, A26. [Google Scholar] [CrossRef] [Green Version]
- Deshpande, R.; Monty, J.P.; Marusic, I. Active and inactive components of the streamwise velocity in wall-bounded turbulence. J. Fluid Mech. 2021, 914, A5. [Google Scholar] [CrossRef]
- Perry, A.; Chong, M. On the mechanism of wall turbulence. J. Fluid Mech. 1982, 119, 173–217. [Google Scholar] [CrossRef] [Green Version]
- Marusic, I.; Monty, J.P. Attached eddy model of wall turbulence. Annu. Rev. Fluid Mech. 2019, 51, 49–74. [Google Scholar] [CrossRef]
- Jimenez, J.; Hoyas, S. Turbulent fluctuations above the buffer layer of wall-bounded flows. J. Fluid Mech. 2008, 611, 215–236. [Google Scholar] [CrossRef] [Green Version]
- Lee, M.; Moser, R.D. Direct numerical simulation of turbulent channel flow up to Reτ ≈ 5200. J. Fluid Mech. 2015, 774, 395–415. [Google Scholar] [CrossRef]
- Orlandi, P.; Bernardini, M.; Pirozzoli, S. Poiseuille and Couette flows in the transitional and fully turbulent regime. J. Fluid Mech. 2015, 770, 424–441. [Google Scholar] [CrossRef]
- Deshpande, R.; Monty, J.P.; Marusic, I. Active and inactive motions in wall turbulence. In Proceedings of the 22nd Australasian Fluid Mechanics Conference, Brisbane, Australia, 7–10 December 2020. [Google Scholar]
- Panton, R.L. Composite asymptotic expansions and scaling wall turbulence. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 733–754. [Google Scholar] [CrossRef]
- Bradshaw, P. ‘Inactive’ motion and pressure fluctuations in turbulent boundary layers. J. Fluid Mech. 1967, 30, 241–258. [Google Scholar] [CrossRef]
- Hutchins, N.; Marusic, I. Evidence of very long meandering features in the logarithmic region of turbulent boundary layers. J. Fluid Mech. 2007, 579, 1–28. [Google Scholar] [CrossRef] [Green Version]
- Yoon, M.; Hwang, J.; Yang, J.; Sung, H.J. Wall-attached structures of streamwise velocity fluctuations in an adverse-pressure-gradient turbulent boundary layer. J. Fluid Mech. 2020, 885, A12. [Google Scholar] [CrossRef]
- Deshpande, R.; Chandran, D.; Monty, J.; Marusic, I. Two-dimensional cross-spectrum of the streamwise velocity in turbulent boundary layers. J. Fluid Mech. 2020, 890, R2. [Google Scholar] [CrossRef]
- Morrison, J.F. The interaction between inner and outer regions of turbulent wall-bounded flow. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 683–698. [Google Scholar] [CrossRef] [PubMed]
- Mathis, R.; Hutchins, N.; Marusic, I. Large-scale amplitude modulation of the small-scale structures in turbulent boundary layers. J. Fluid Mech. 2009, 628, 311–337. [Google Scholar] [CrossRef] [Green Version]
- Wu, S.; Christensen, K.; Pantano, C. Modelling smooth- and transitionally rough-wall turbulent channel flow by leveraging inner–outer interactions and principal component analysis. J. Fluid Mech. 2019, 863, 407–453. [Google Scholar] [CrossRef]
- McNaughton, K.G.; Brunet, Y. Townsend’s hypothesis, coherent structures and Monin–Obukhov similarity. Bound.-Layer Meteorol. 2002, 102, 161–175. [Google Scholar] [CrossRef]
- Kovasznay, L.S.G.; Kibens, V.; Blackwelder, R.F. Large-scale motion in the intermittent region of a turbulent boundary layer. J. Fluid Mech. 1970, 41, 283–325. [Google Scholar] [CrossRef] [Green Version]
- Sapsis, T.P. Statistics of extreme events in fluid flows and waves. Annu. Rev. Fluid Mech. 2021, 53. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| x | U∞ | Reτ | ν/Uτ | Δt+ | TU∞/δ | Δ | Single-Point/ | Reference | ||
|---|---|---|---|---|---|---|---|---|---|---|
| (in m) | (in ms−1) | (in μm) | Multi-Point | |||||||
| 2 | 15.2 | 2600 | 28 | 0.513 | 18,000 | 14 | 14 | 7 | Single | Baidya et al. [26] |
| 7 | 15.2 | 5100 | 30 | 0.436 | 19,000 | 13 | 13 | 7 | Single | Baidya et al. [26] |
| 18 | 14.8 | 10,600 | 32 | 0.377 | 18,000 | 12 | 12 | 6 | Single | Baidya et al. [26] |
| 20 | 19.0 | 15,000 | 24.6 | 0.496 | 30,900 | 17 | 17 | 8.5 | Multi | Talluru et al. [25] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deshpande, R.; Marusic, I. Characterising Momentum Flux Events in High Reynolds Number Turbulent Boundary Layers. Fluids 2021, 6, 168. https://doi.org/10.3390/fluids6040168
Deshpande R, Marusic I. Characterising Momentum Flux Events in High Reynolds Number Turbulent Boundary Layers. Fluids. 2021; 6(4):168. https://doi.org/10.3390/fluids6040168
Chicago/Turabian StyleDeshpande, Rahul, and Ivan Marusic. 2021. "Characterising Momentum Flux Events in High Reynolds Number Turbulent Boundary Layers" Fluids 6, no. 4: 168. https://doi.org/10.3390/fluids6040168
APA StyleDeshpande, R., & Marusic, I. (2021). Characterising Momentum Flux Events in High Reynolds Number Turbulent Boundary Layers. Fluids, 6(4), 168. https://doi.org/10.3390/fluids6040168