
Numerical Simulation of High-Density Ratio Bubble Motion with interIsoFoam

 , , , and
, , , and
Abstract
:1. Introduction
2. Code Description and Methods
3. Results
3.1. interIsoFoam Validation
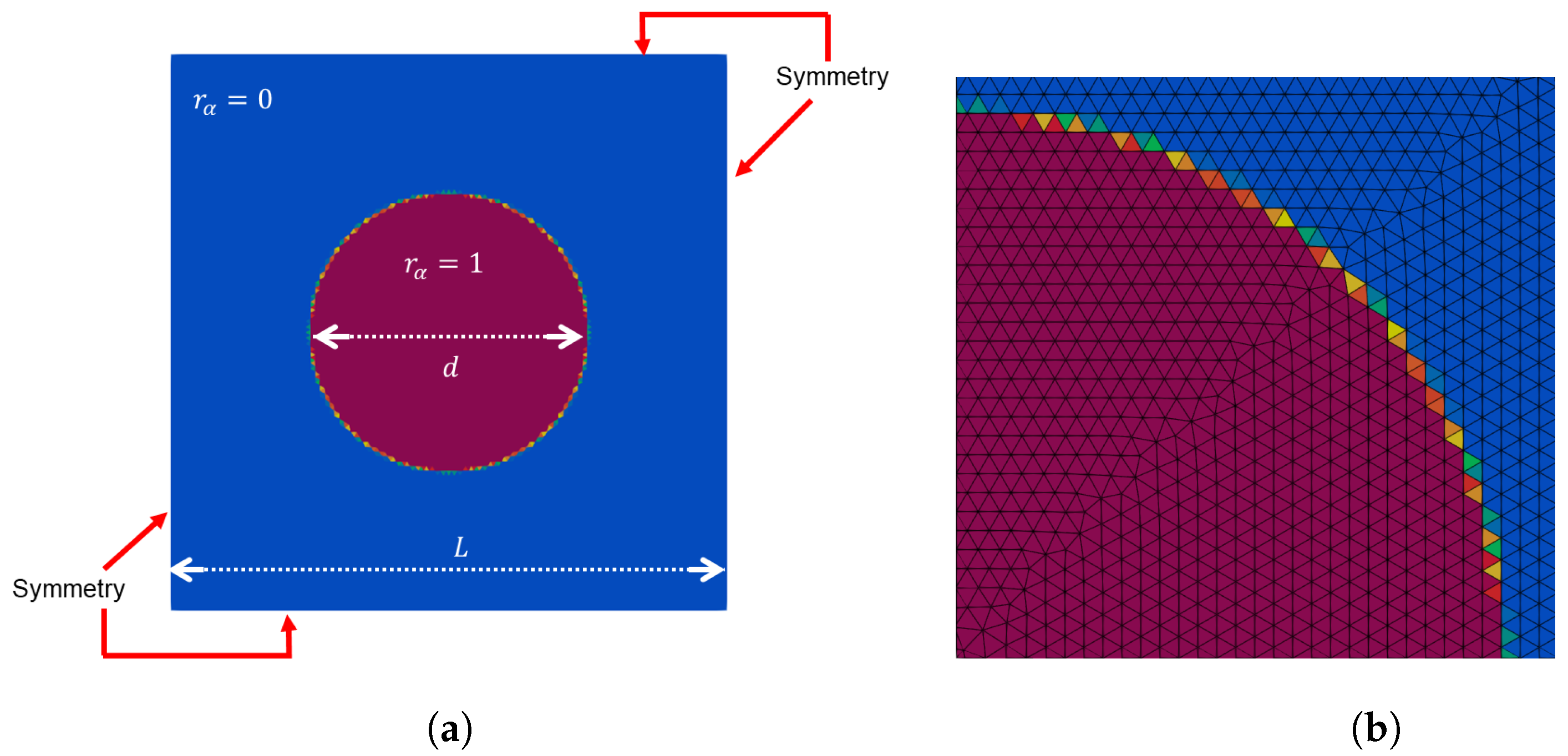
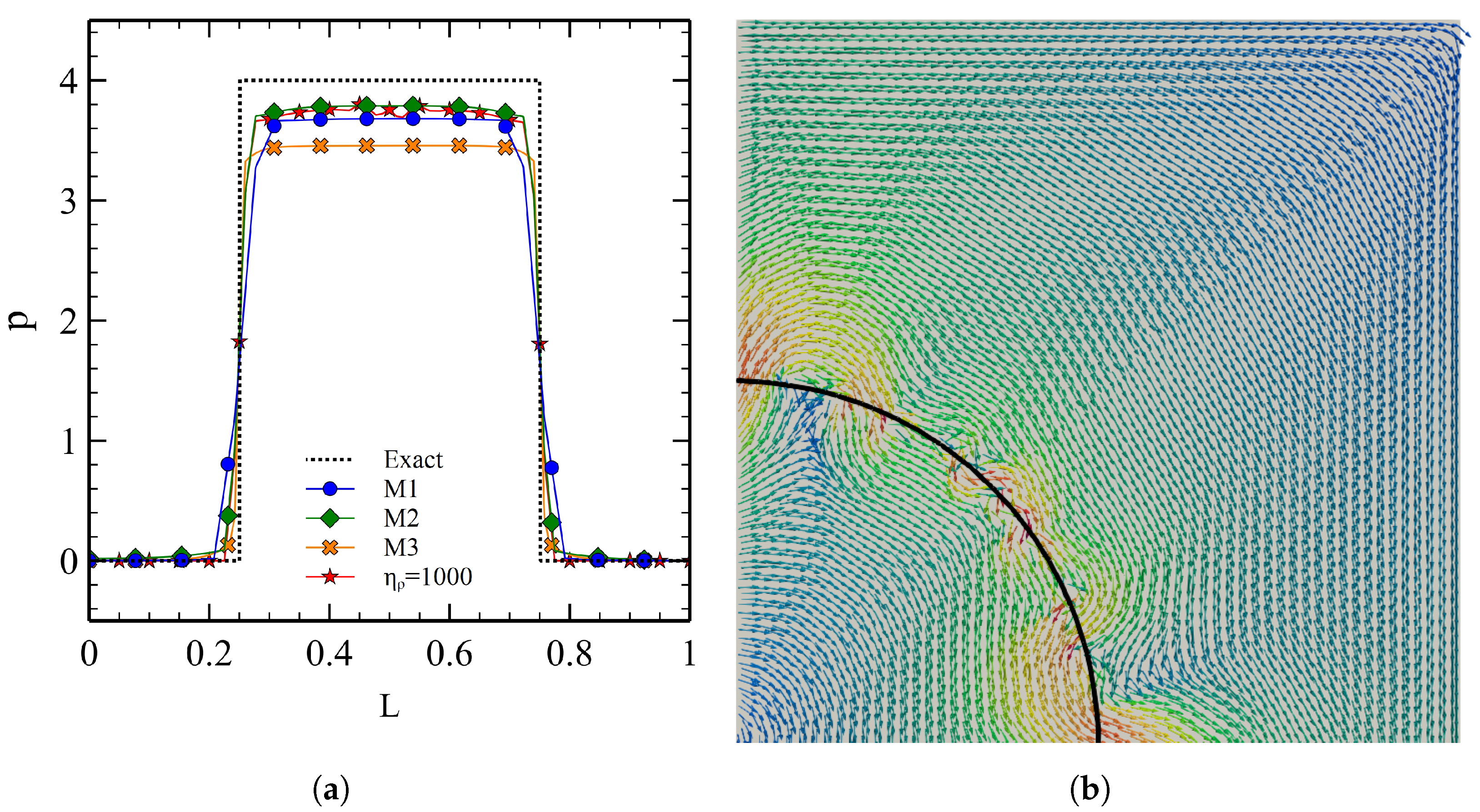
3.1.1. 2D Stationary Drop
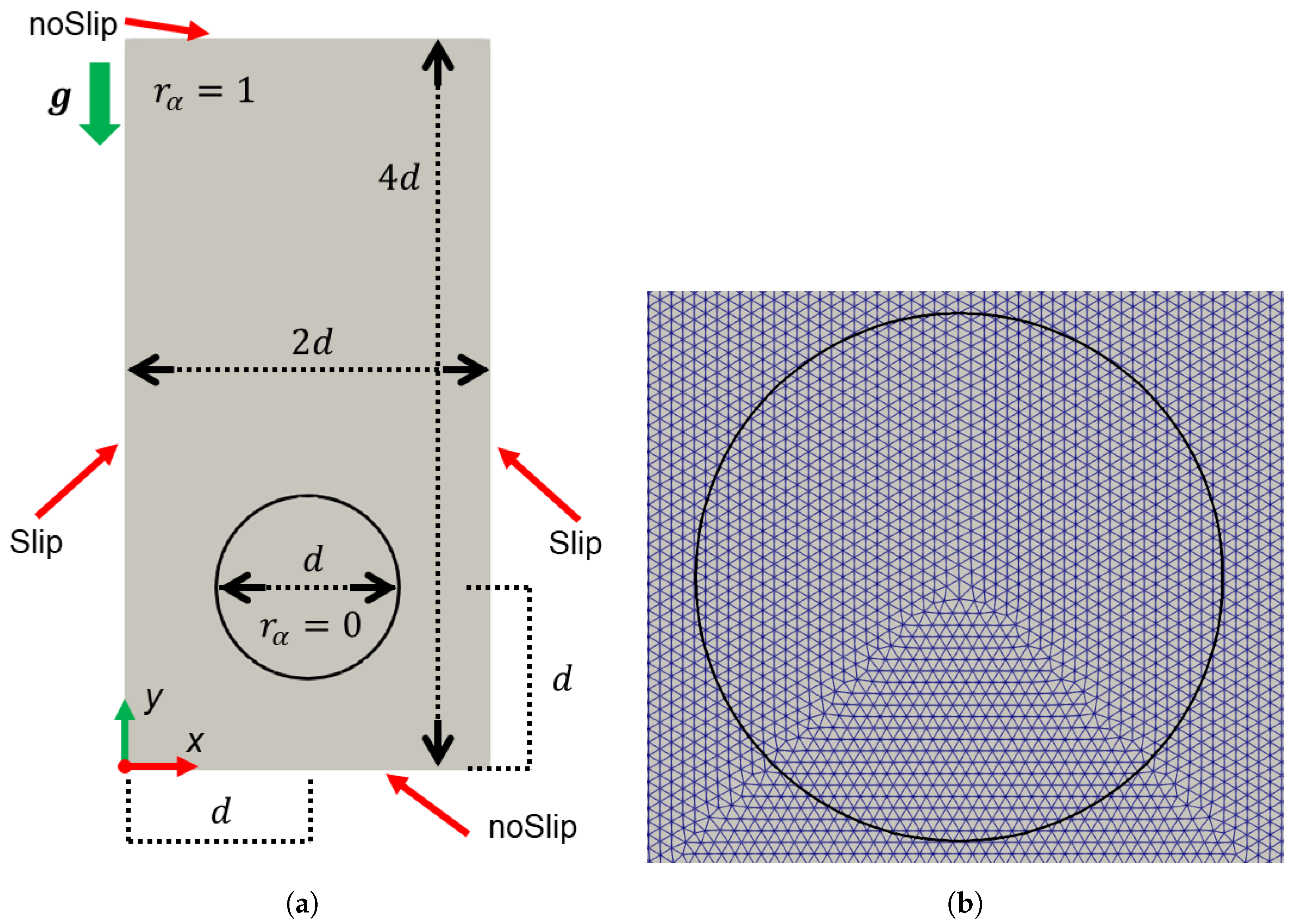
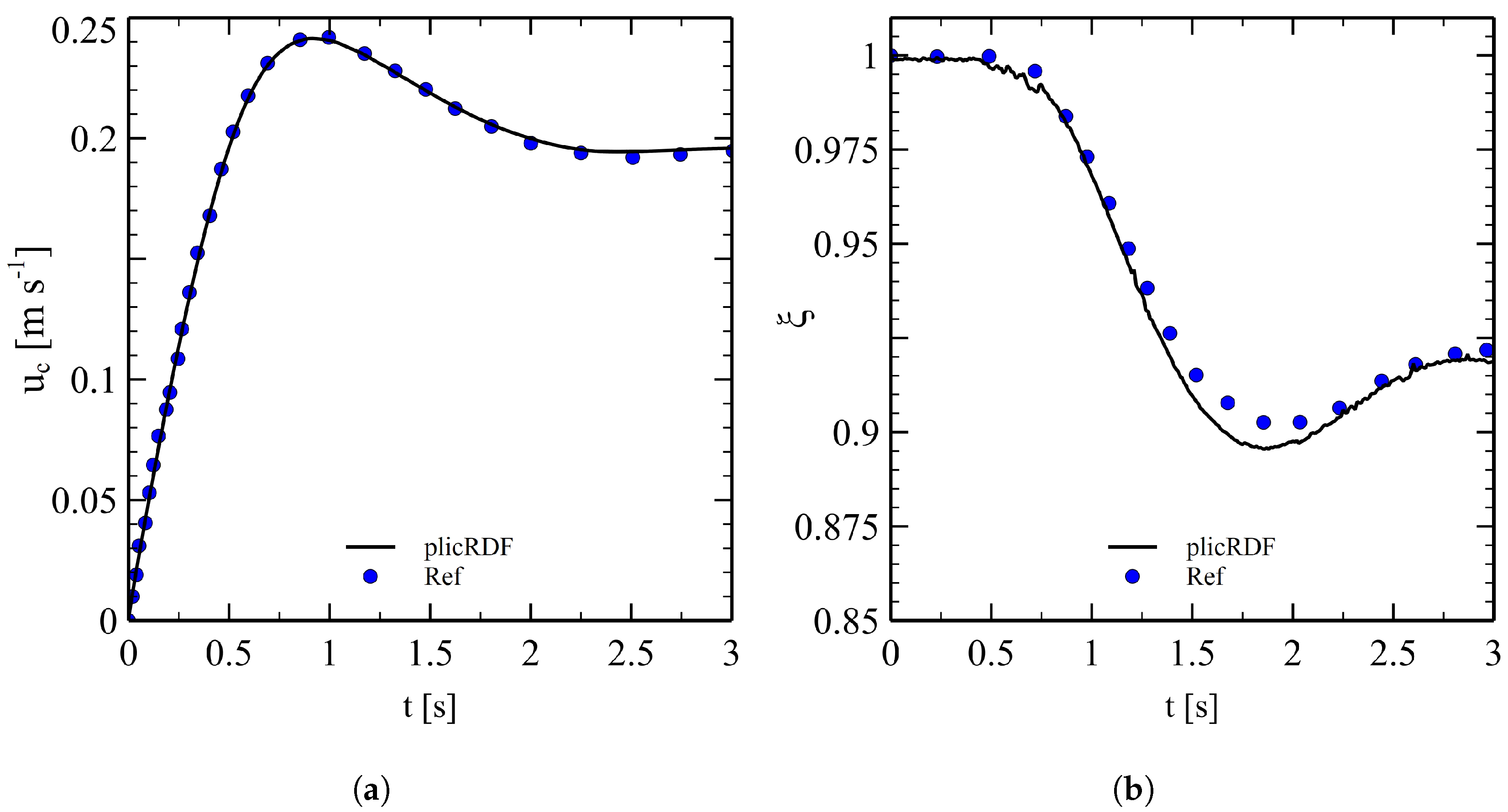
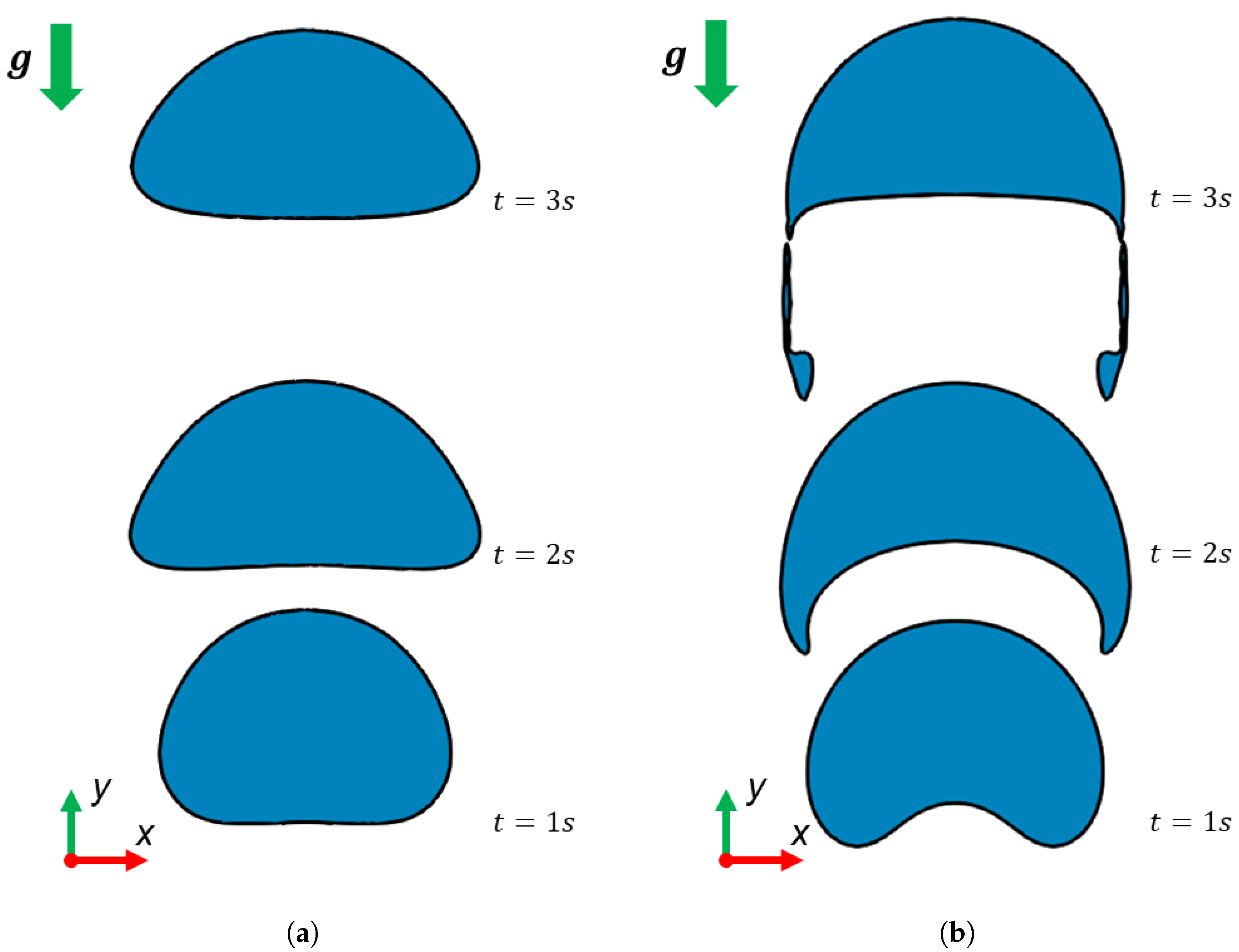
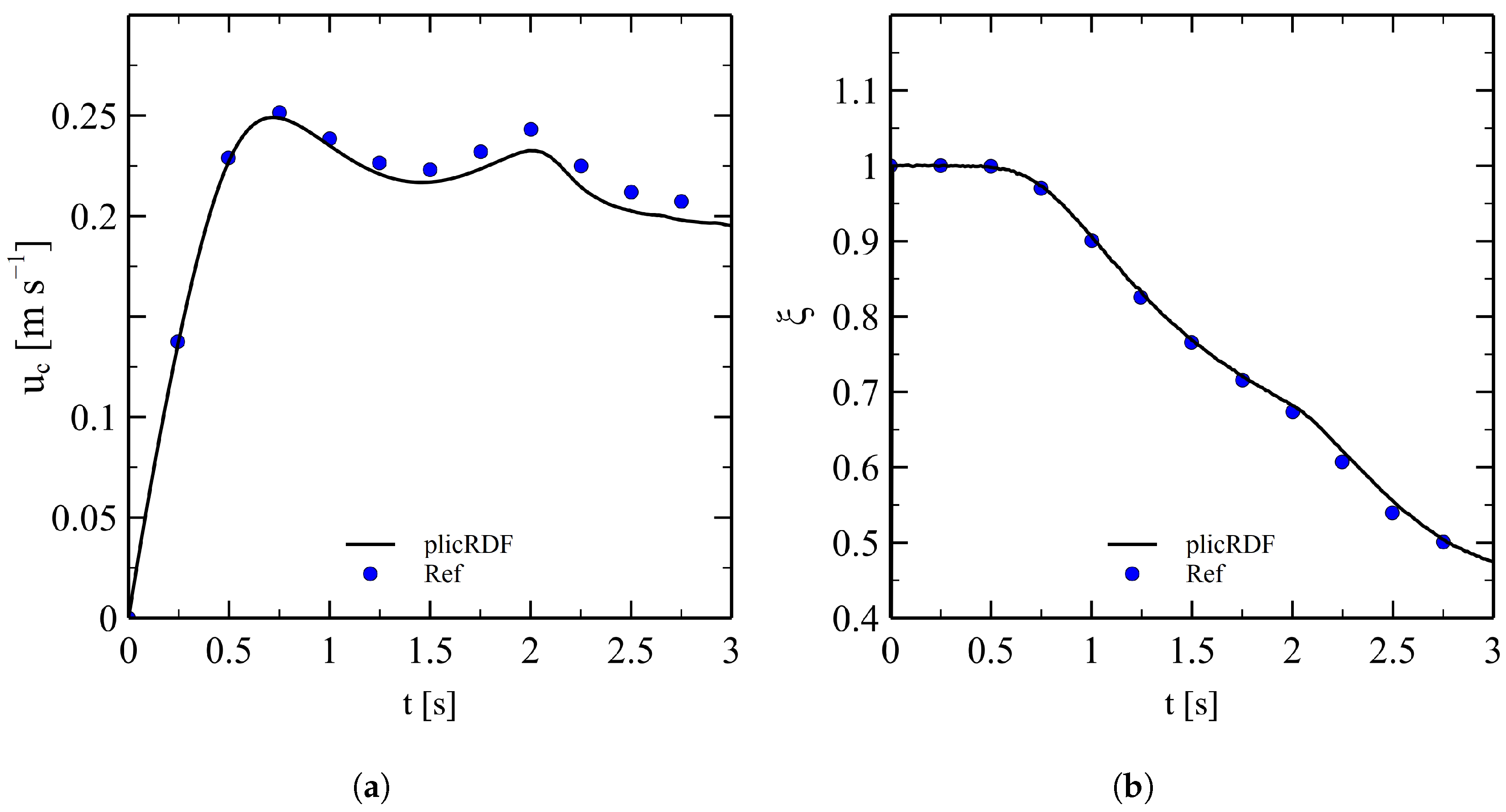
3.1.2. 2D Rising Bubble
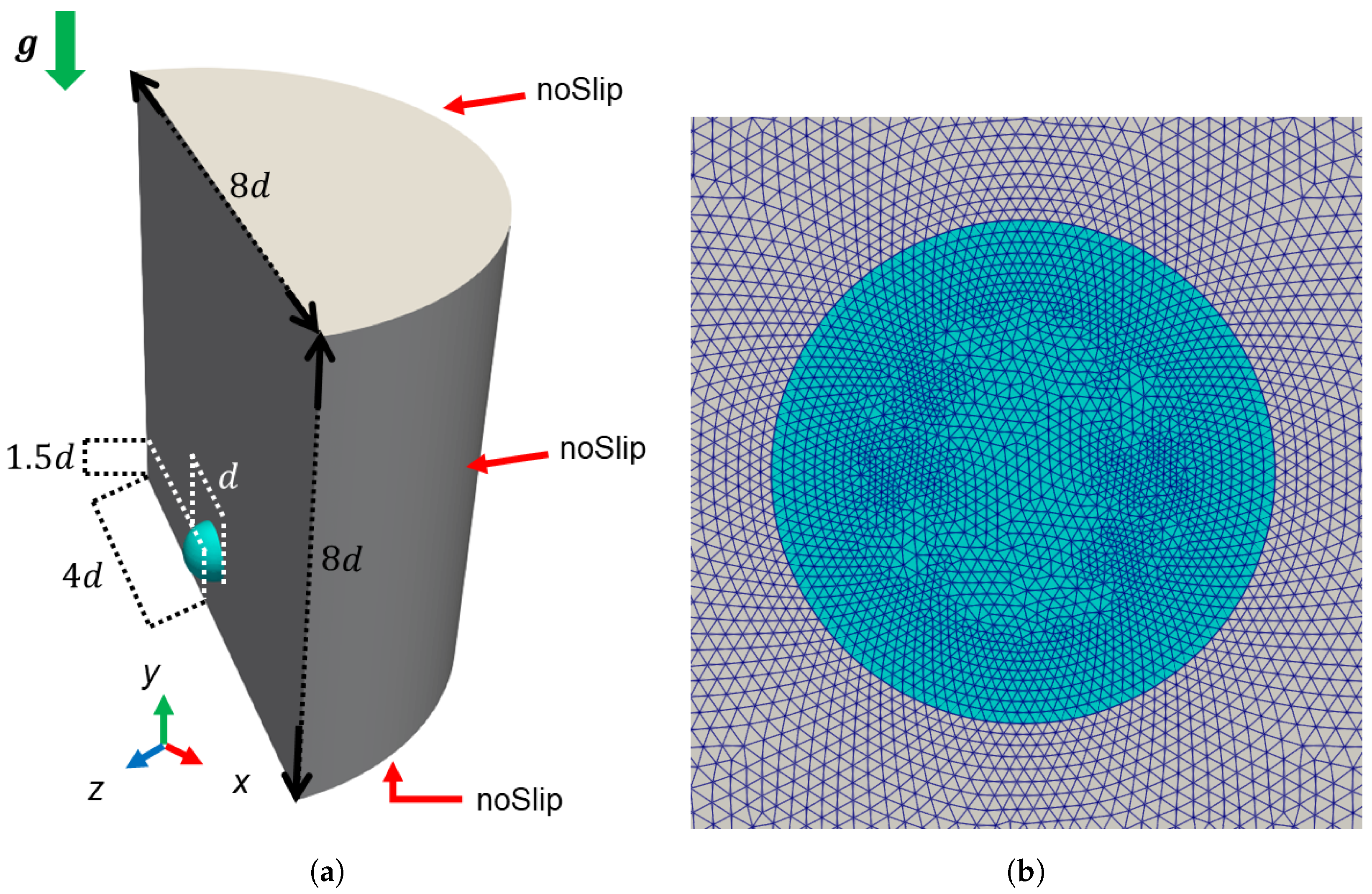
3.1.3. 3D Rising Bubble
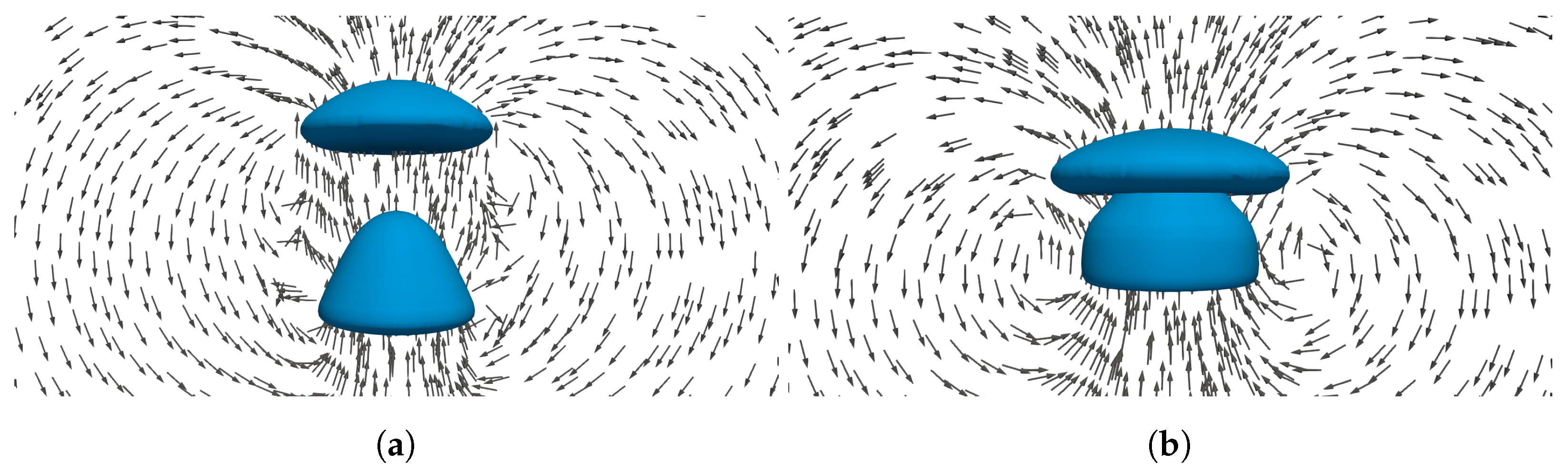
3.1.4. Co-Axial Coalescence of Two Bubbles
3.2. Rising He Bubble in PbLi
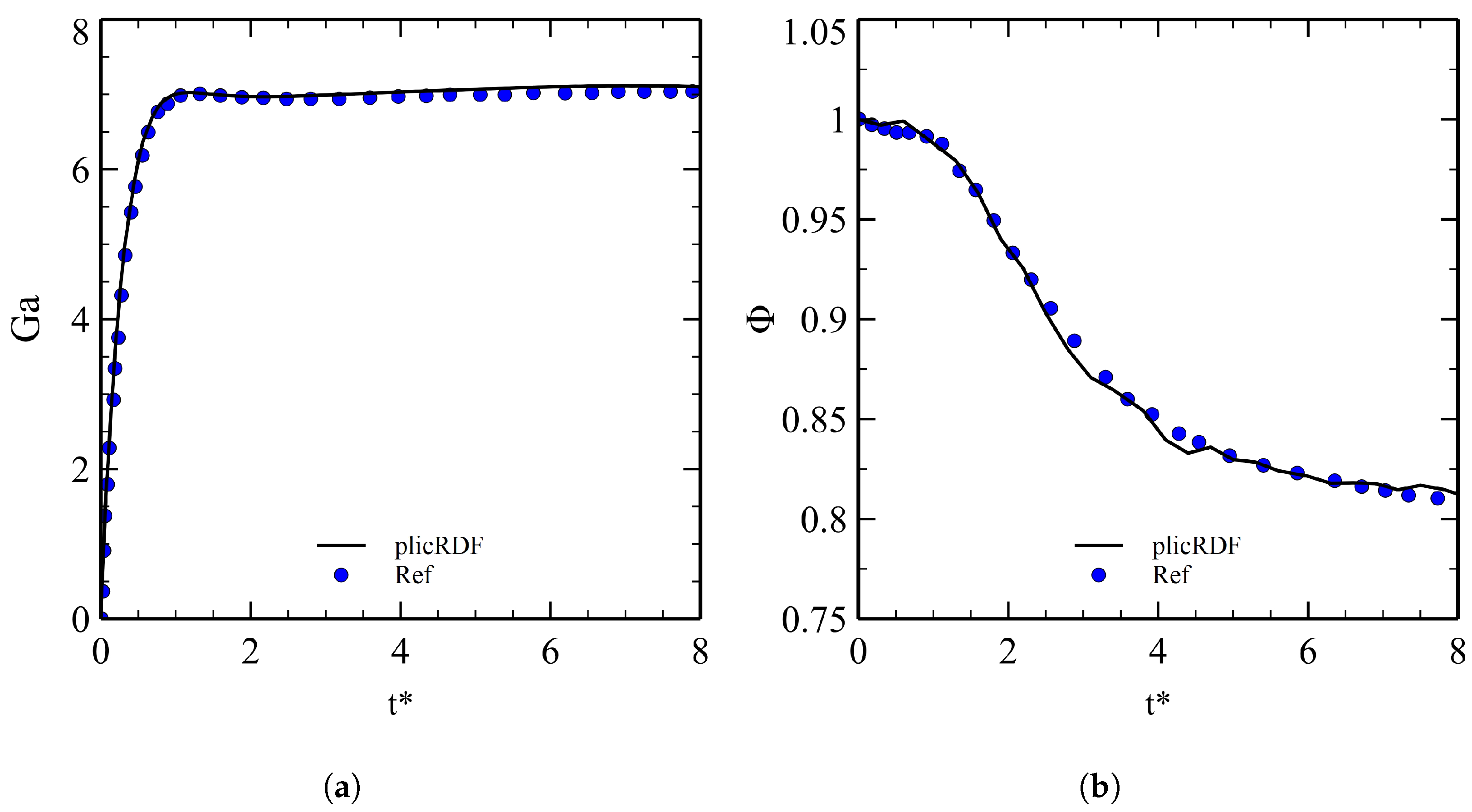
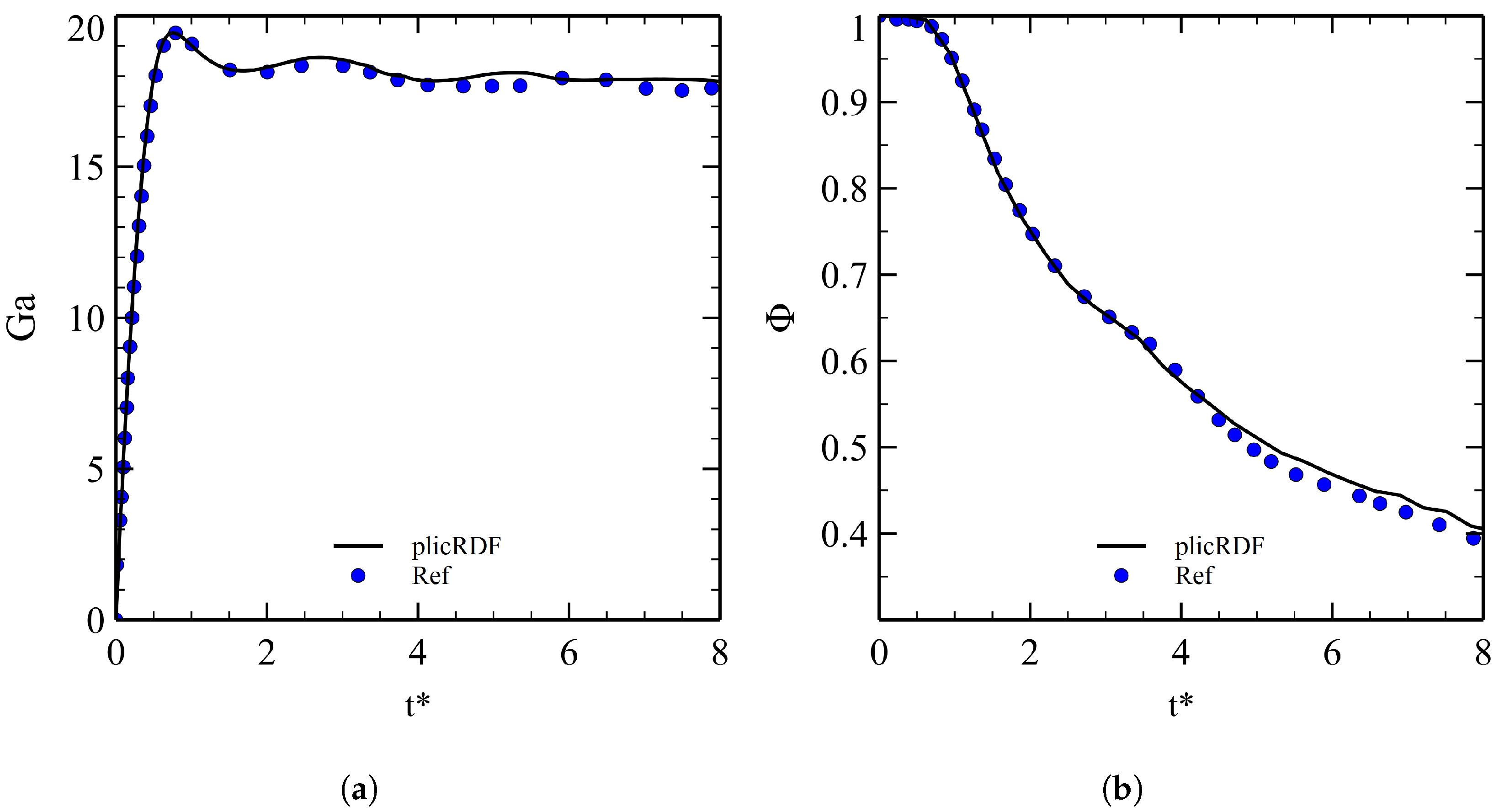
3.2.1. Axisymmetric and Skirted Regimes
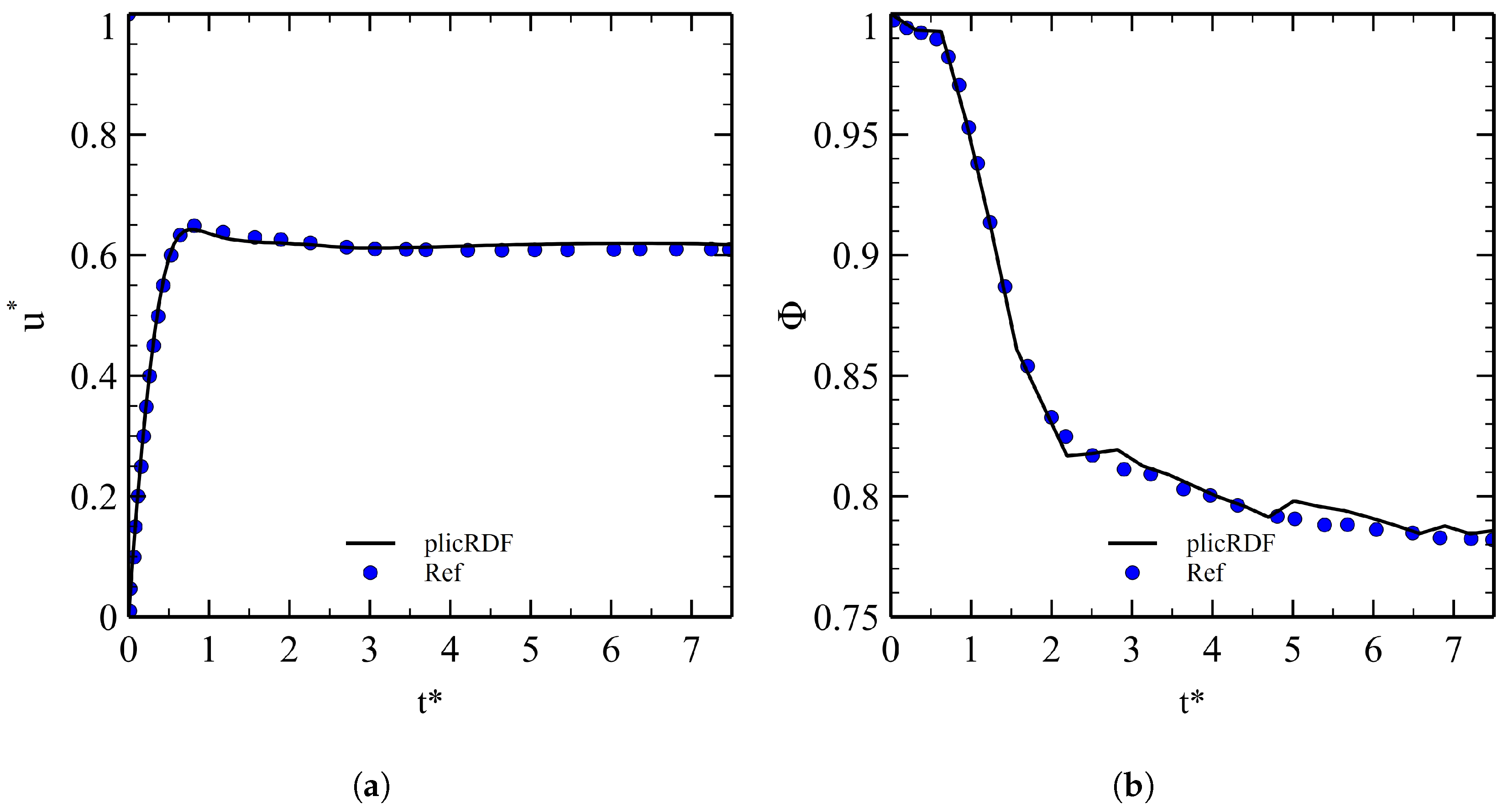
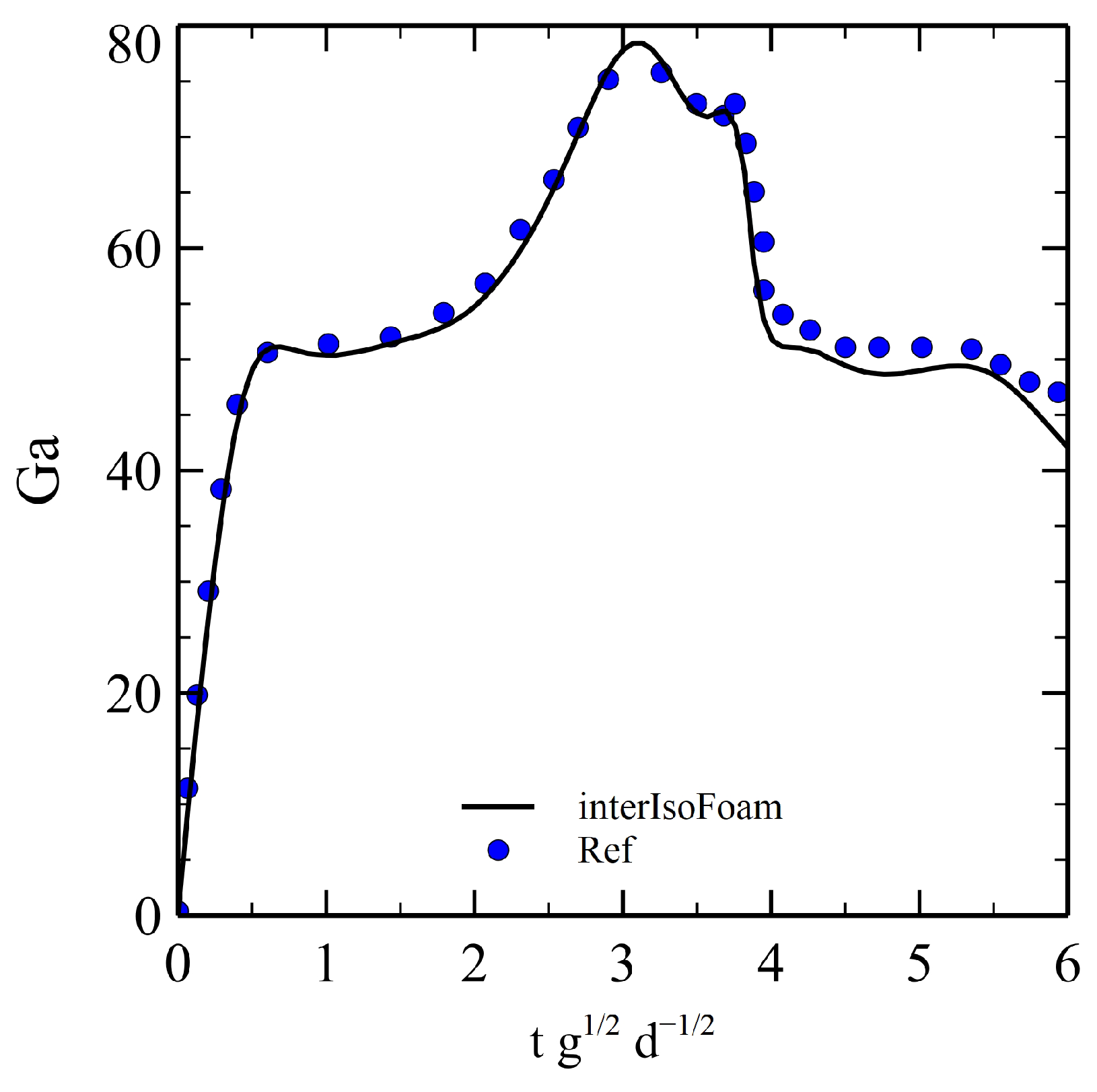
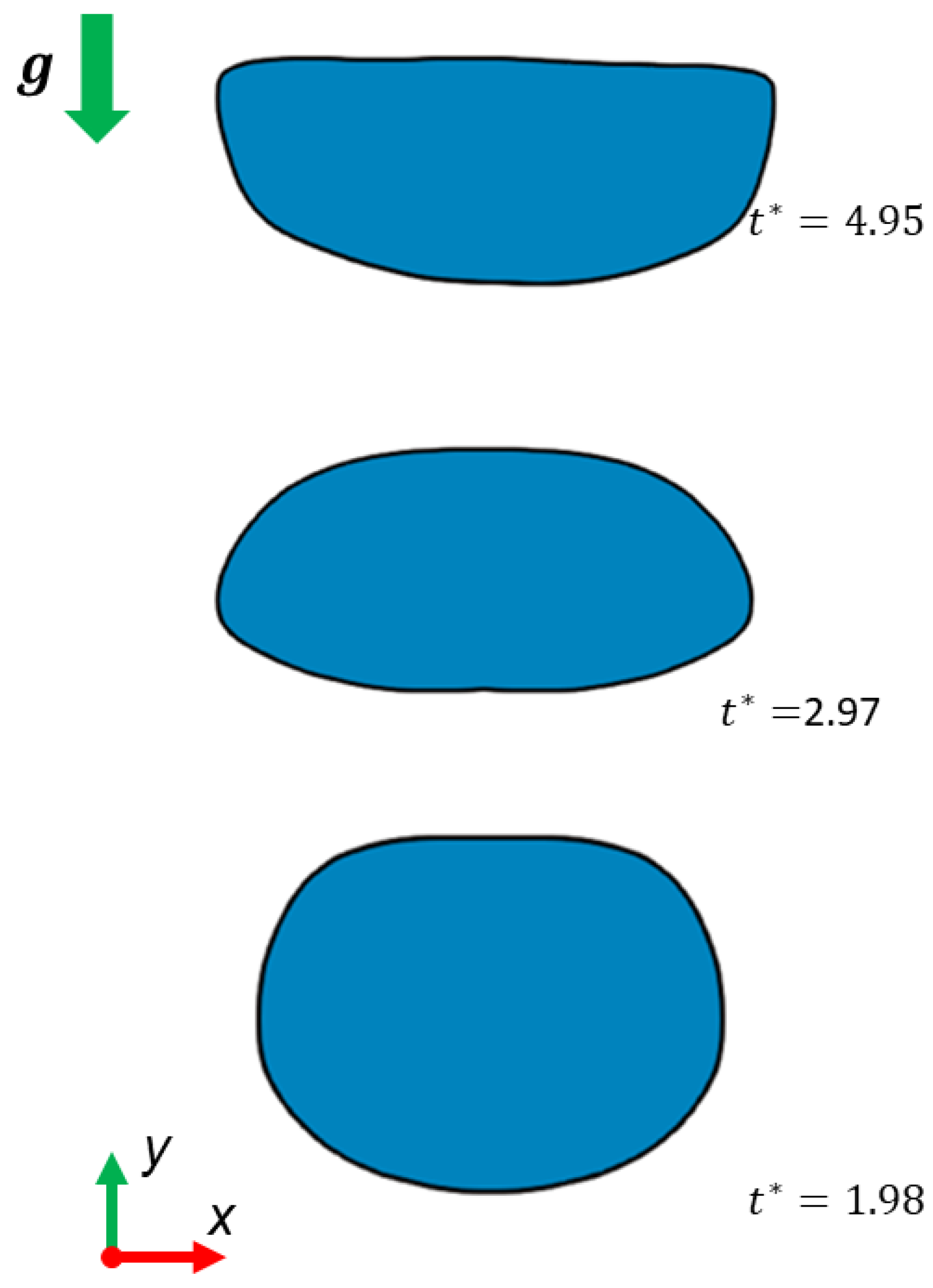
3.2.2. Oscillatory Regime
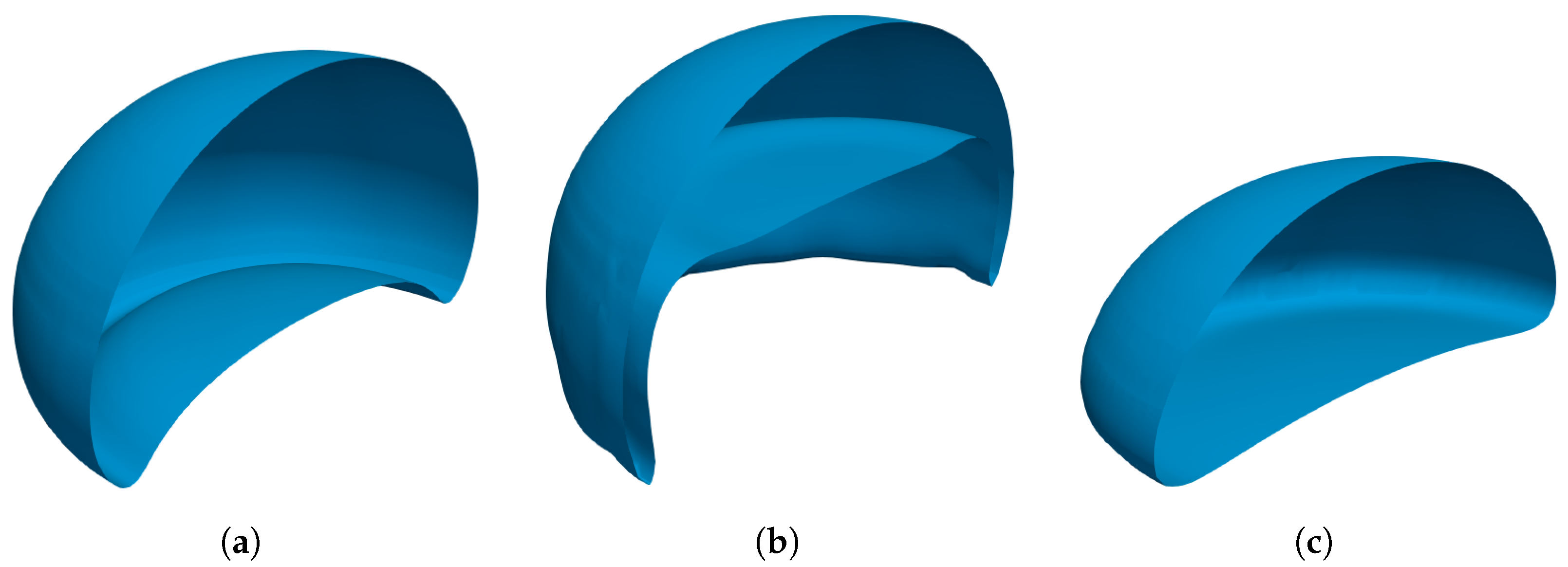
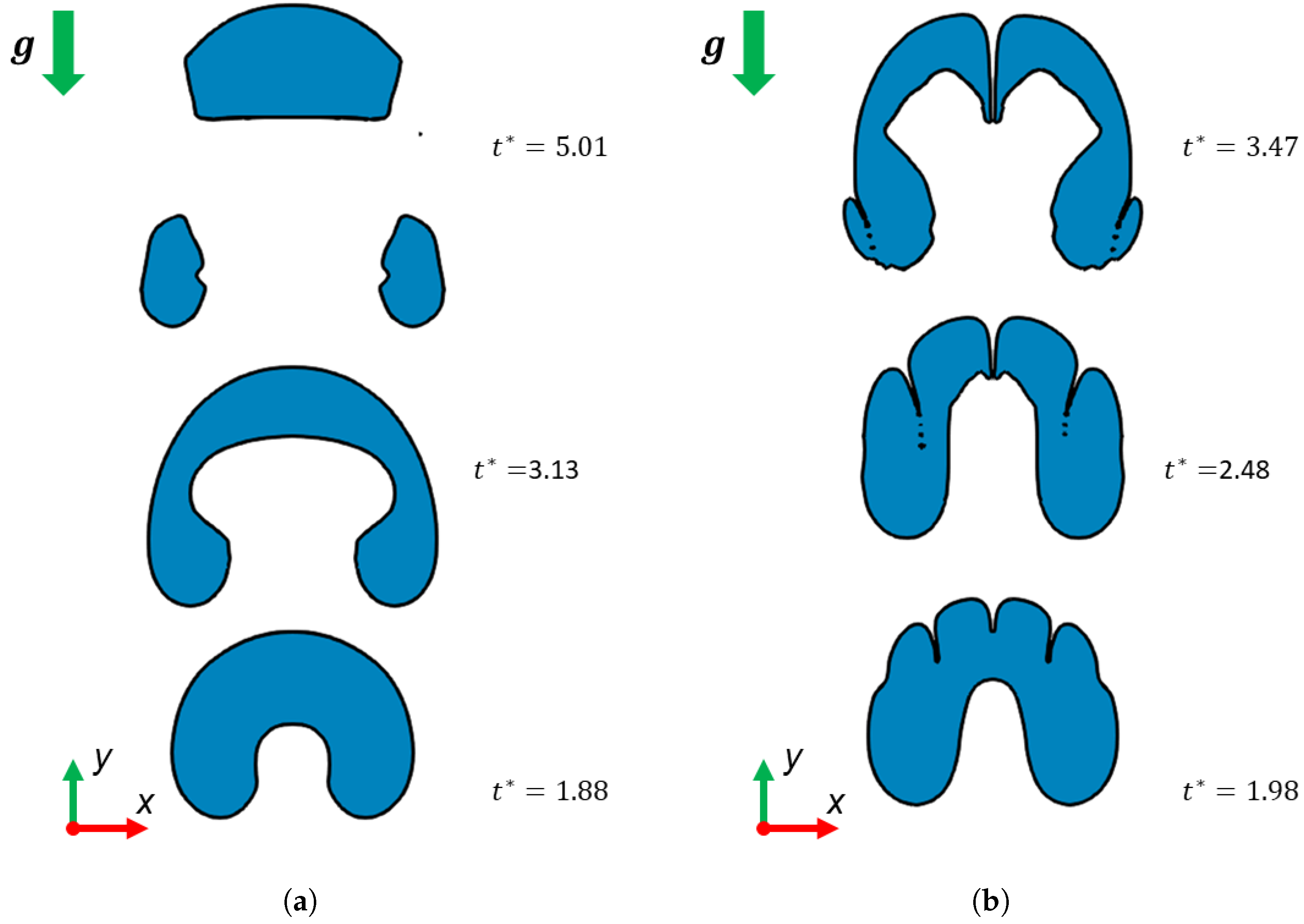
3.2.3. Peripheral and Central Breakup Regimes
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kikuchi, M.; Lackner, K.; Quang, M. Fusion Physics; International Atomic Energy Agency (IAEA): Vienna, Austria, 2012. [Google Scholar]
- Batet, L.; Fradera, J.; Valls, E.M.D.L.; Sedano, L.A. Numeric implementation of a nucleation, growth and transport model for helium bubbles in lead-lithium HCLL breeding blanket channels: Theory and code development. Fusion Eng. Des. 2011, 86, 421–428. [Google Scholar] [CrossRef]
- Kordač, M.; Košek, L. Helium bubble formation in Pb-16Li within the breeding blanket. Fusion Eng. Des. 2017, 124, 700–704. [Google Scholar] [CrossRef]
- Prosperetti, A.; Tryggvason, G. Computational Methods for Multiphase Flow; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar] [CrossRef] [Green Version]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Osher, S.; Sethian, J.A. Fronts propagating with curvature-dependent speed: Algorithms based on Hamilton-Jacobi formulations. J. Comput. Phys. 1988, 79, 12–49. [Google Scholar] [CrossRef] [Green Version]
- Deshpande, S.S.; Anumolu, L.; Trujillo, M.F. Evaluating the performance of the two-phase flow solver interFoam. Comput. Sci. Discov. 2012, 5, 014016. [Google Scholar] [CrossRef]
- Cummins, S.J.; Francois, M.M.; Kothe, D.B. Estimating curvature from volume fractions. Comput. Struct. 2005, 83, 425–434. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, J.; Stern, F. An improved particle correction procedure for the particle level set method. J. Comput. Phys. 2009, 228, 5819–5837. [Google Scholar] [CrossRef]
- Balcázar, N.; Lehmkuhl, O.; Jofre, L.; Rigola, J.; Oliva, A. A coupled volume-of-fluid/level-set method for simulation of two-phase flows on unstructured meshes. Comput. Fluids 2016, 124, 12–29. [Google Scholar] [CrossRef] [Green Version]
- Nave, J.C.; Rosales, R.R.; Seibold, B. A gradient-augmented level set method with an optimally local, coherent advection scheme. J. Comput. Phys. 2010, 229, 3802–3827. [Google Scholar] [CrossRef] [Green Version]
- Francois, M.M.; Cummins, S.J.; Dendy, E.D.; Kothe, D.B.; Sicilian, J.M.; Williams, M.W. A balanced-force algorithm for continuous and sharp interfacial surface tension models within a volume tracking framework. J. Comput. Phys. 2006, 213, 141–173. [Google Scholar] [CrossRef]
- Tryggvason, G.; Scardovelli, R.; Zaleski, S. Direct Numerical Simulations of Gas–Liquid Multiphase Flows; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Zhang, C.; Eckert, S.; Gerbeth, G. Experimental study of single bubble motion in a liquid metal column exposed to a DC magnetic field. Int. J. Multiph. Flow 2005, 31, 824–842. [Google Scholar] [CrossRef]
- Schwarz, S.; Fröhlich, J. Numerical study of single bubble motion in liquid metal exposed to a longitudinal magnetic field. Int. J. Multiph. Flow 2014, 62, 134–151. [Google Scholar] [CrossRef]
- Zhang, J.; Ni, M.J. A numerical study of a bubble pair rising side by side in external magnetic fields. J. Fluid Mech. 2021, 926. [Google Scholar] [CrossRef]
- Kessel, C.E.; Andruczyk, D.; Blanchard, J.P.; Bohm, T.; Davis, A.; Hollis, K.; Humrickhouse, P.W.; Hvasta, M.; Jaworski, M.; Jun, J.; et al. Critical Exploration of Liquid Metal Plasma-Facing Components in a Fusion Nuclear Science Facility. Fusion Sci. Technol. 2019, 75, 886–917. [Google Scholar] [CrossRef]
- Smolentsev, S.; Rognlien, T.; Tillack, M.; Waganer, L.; Kessel, C. Integrated Liquid Metal Flowing First Wall and Open-Surface Divertor for Fusion Nuclear Science Facility: Concept, Design, and Analysis. Fusion Sci. Technol. 2019, 75, 939–958. [Google Scholar] [CrossRef]
- Siriano, S.; Tassone, A.; Caruso, G. Numerical Simulation of Thin-Film MHD Flow for Nonuniform Conductivity Walls. Fusion Sci. Technol. 2021, 77, 144–158. [Google Scholar] [CrossRef]
- OpenFOAM: User Guide. Available online: https://www.openfoam.com/documentation/user-guide (accessed on 27 March 2022).
- Weller, H.G. A New Approach to VOF-Based Interface Capturing Methods for Incompressible and Compressible Flow; Report TR/HGW; OpenCFD Ltd.: Bracknell, UK, 2008; Volume 4. [Google Scholar]
- Roenby, J.; Bredmose, H.; Jasak, H. A computational method for sharp interface advection. R. Soc. Open Sci. 2016, 3, 160405. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Roenby, J.; Bredmose, H.; Jasak, H. Isoadvector: Geometric vof on general meshes. In OpenFOAM—Selected Papers of the 11th Workshop; Springer: Cham, Switzerland, 2019; pp. 281–296. [Google Scholar] [CrossRef]
- Scheufler, H.; Roenby, J. Accurate and efficient surface reconstruction from volume fraction data on general meshes. J. Comput. Phys. 2019, 383, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Brackbill, J.U.; Kothe, D.B.; Zemach, C. A continuum method for modeling surface tension. J. Comput. Phys. 1992, 100, 335–354. [Google Scholar] [CrossRef]
- Gamet, L.; Scala, M.; Roenby, J.; Scheufler, H.; Pierson, J.L. Validation of volume-of-fluid OpenFOAM® isoAdvector solvers using single bubble benchmarks. Comput. Fluids 2020, 213, 104722. [Google Scholar] [CrossRef]
- Hysing, S. Mixed element FEM level set method for numerical simulation of immiscible fluids. J. Comput. Phys. 2012, 231, 2449–2465. [Google Scholar] [CrossRef]
- Popinet, S. Numerical Models of Surface Tension. Annu. Rev. Fluid Mech. 2018, 50, 49–75. [Google Scholar] [CrossRef] [Green Version]
- Hysing, S.; Turek, S.; Kuzmin, D.; Parolini, N.; Burman, E.; Ganesan, S.; Tobiska, L. Quantitative benchmark computations of two-dimensional bubble dynamics. Int. J. Numer. Methods Fluids 2009, 60, 1259–1288. [Google Scholar] [CrossRef]
- Hua, J.; Stene, J.F.; Lin, P. Numerical simulation of 3D bubbles rising in viscous liquids using a front tracking method. J. Comput. Phys. 2008, 227, 3358–3382. [Google Scholar] [CrossRef] [Green Version]
- Bhaga, D.; Weber, M.E. Bubbles in viscous liquids: Shapes, wakes and velocities. J. Fluid Mech. 1981, 105, 61–85. [Google Scholar] [CrossRef] [Green Version]
- Hnat, J.G.; Buckmaster, J.D. Spherical cap bubbles and skirt formation. Phys. Fluids 1976, 19, 182–194. [Google Scholar] [CrossRef]
- Brereton, G.; Korotney, D. Coaxial and oblique coalescence of two rising bubbles. Dyn. Bubbles Vortices Near Free. Surf. 1991, 119, 50–73. [Google Scholar]
- Numerical simulation of gas bubbles behaviour using a three-dimensional volume of fluid method. Chem. Eng. Sci. 2005, 60, 2999–3011. [CrossRef]
- Balcázar, N.; Jofre, L.; Lehmkuhl, O.; Castro, J.; Rigola, J. A finite-volume/level-set method for simulating two-phase flows on unstructured grids. Int. J. Multiph. Flow 2014, 64, 55–72. [Google Scholar] [CrossRef]
- Clift, R.; Grace, J.; Weber, M. Bubbles, Drops and Particles; Dover Publications, Inc.: New York, NY, USA, 1978. [Google Scholar]
- Tripathi, M.K.; Sahu, K.C.; Govindarajan, R. Dynamics of an initially spherical bubble rising in quiescent liquid. Nat. Commun. 2015, 6, 6268. [Google Scholar] [CrossRef] [Green Version]
- Sharaf, D.M.; Premlata, A.R.; Tripathi, M.K.; Karri, B.; Sahu, K.C. Shapes and paths of an air bubble rising in quiescent liquids. Phys. Fluids 2017, 29, 122104. [Google Scholar] [CrossRef] [Green Version]
- The Engineering ToolBox. Helium—Density and Specific Weight. Available online: https://www.engineeringtoolbox.com/helium-density-specific-weight-temperature-pressure-d_2090.html (accessed on 27 March 2022).
- The Engineering ToolBox. Gases—Dynamic Viscosity. Available online: https://www.engineeringtoolbox.com/gases-absolute-dynamic-viscosity-d_1888.html (accessed on 27 March 2022).
- Zhang, J.; Ni, M.J. Direct simulation of multi-phase MHD flows on an unstructured Cartesian adaptive system. J. Comput. Phys. 2014, 270, 345–365. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid Size h (m) | Number of Elements | |||
|---|---|---|---|---|
| M1 | 0.04 | 1400 | 2.68 × 10−3 | 0.125 |
| M2 | 0.02 | 5678 | 1.84 × 10−3 | 0.068 |
| M3 | 0.01 | 22,902 | 1.30 × 10−3 | 0.146 |
| 0.02 | 5678 | 4.1 × 10−1 | 0.075 |
| g (m s) | (N m) | Eo | Ga | |||
|---|---|---|---|---|---|---|
| C1 | 10 | 10 | 0.98 | 24.5 | 10 | 35 |
| C2 | 1000 | 100 | 0.98 | 1.96 | 125 | 35 |
| Grid Size h (m) | Number of Elements | |
|---|---|---|
| M1 | 0.01250 | 29,344 |
| M2 | 0.00833 | 66,854 |
| M3 | 0.00625 | 116,142 |
| M4 | 0.00500 | 184,398 |
| isoAlpha | plicRDF | |||||
|---|---|---|---|---|---|---|
(m s) | (t = 3 s) | (m s) | (t = 3 s) | |||
| M1 | 0.8939 | 0.2414 | 1.0831 | 0.8945 | 0.2413 | 1.0832 |
| M2 | 0.8947 | 0.2409 | 1.0833 | 0.8946 | 0.2408 | 1.0834 |
| M3 | 0.8952 | 0.2415 | 1.0839 | 0.8953 | 0.2413 | 1.0840 |
| M4 | 0.8952 | 0.2417 | 1.0840 | 0.8955 | 0.2414 | 1.0841 |
(m s) | (t = 3 s) | ||||
|---|---|---|---|---|---|
| isoAlpha | 0.8952 | 1.8900 | 0.2415 | 0.9260 | 1.0839 |
| plicRDF | 0.8953 | 1.9000 | 0.2413 | 0.9280 | 1.0840 |
| Ref. [10] | 0.9005 | 1.8934 | 0.2414 | 0.9260 | 1.0809 |
| Ref. [29] | 0.9014 | 1.9070 | 0.2419 | 0.9281 | 1.0812 |
(m s) | (t = 3 s) | ||||
|---|---|---|---|---|---|
| isoAlpha | 0.4743 | 3.0000 | 0.2491 | 0.7170 | 1.1175 |
| plicRDF | 0.4725 | 3.0000 | 0.2491 | 0.7180 | 1.1175 |
| TP2D | 0.5869 | 2.4004 | 0.2524 | 0.7332 | 1.1380 |
| FreeLIFE | 0.4647 | 3.0000 | 0.2514 | 0.7281 | 1.1249 |
| MooNMD | 0.5144 | 3.0000 | 0.2502 | 0.7317 | 1.1376 |
| g (m s) | (N m) | Eo | Mo | |||
|---|---|---|---|---|---|---|
| C1 | 100 | 100 | 9.81 | 8.37 × 10−3 | 116 | 41.1 |
| C2 | 100 | 100 | 9.81 | 2.86 × 10−3 | 339 | 43.1 |
| C3 | 714 | 6670 | 9.81 | 2.49 × 10−2 | 39.4 | 0.065 |
| Grid Size h (cm) | Axial Divisions s | Number of Elements | |
|---|---|---|---|
| M1 | 0.067 | 120 | 222,720 |
| M2 | 0.050 | 160 | 774,400 |
| M3 | 0.033 | 240 | 2,881,200 |
| M4 | 0.025 | 320 | 7,128,320 |
| Ga | ||||
|---|---|---|---|---|
| M1 | 0.8341 | 2.807 | 7.0894 | 0.263 |
| M2 | 0.8181 | 0.901 | 7.1176 | 0.134 |
| M3 | 0.8126 | 0.234 | 7.1032 | 0.068 |
| M4 | 0.8107 | - | 7.1080 | - |
| Ga | ||||
|---|---|---|---|---|
| pliRDF | 7.09 | - | 0.82 | - |
| Ref. [10] | 7.02 | 0.98 | 0.81 | 0.71 |
| Ref. [31] | 7.16 | 1.00 | - | - |
| Ref. [30] | 7.0 | 1.27 | - | - |
| Ga | ||
|---|---|---|
| pliRDF | 17.88 | - |
| Ref. [10] | 17.64 | 1.36 |
| Ref. [30] | 17.91 | 0.17 |
| Ref. [31] | 18.3 | 2.30 |
| pliRDF | 0.6195 | - |
| Ref. [10] | 0.6110 | 1.40 |
| Ref. [32] | 0.6226 | 0.49 |
| (mm) | Ga | Eo | |||
|---|---|---|---|---|---|
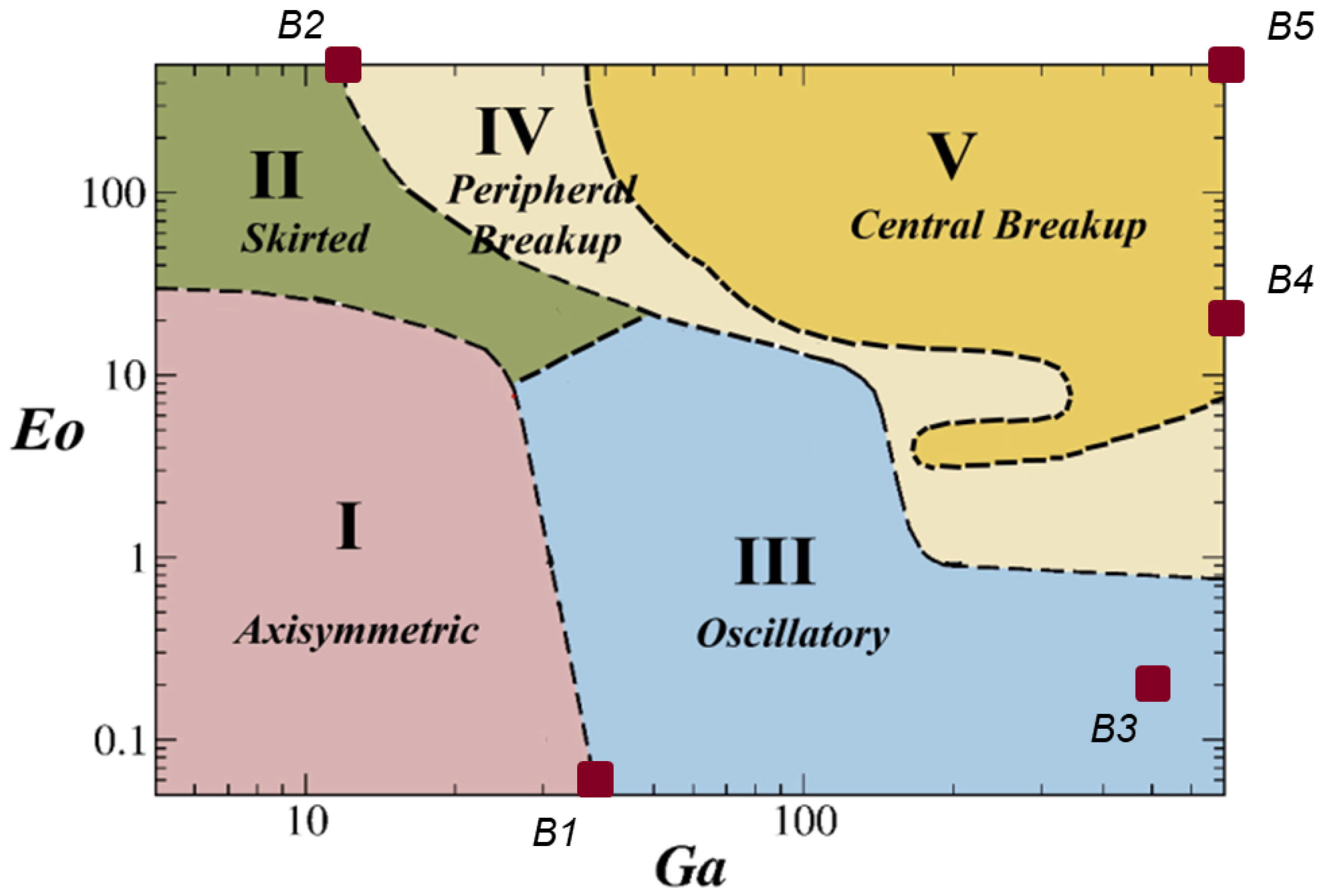
| B1 | 0.2 | 1.24 × 105 | 61 | 44 | 8.44 × 10−3 |
| B2 | 116 | 5.00 × 104 | 100 | 12 | 4.86 × 103 |
| B3 | 1 | 1.24 × 105 | 61 | 497 | 0.21 |
| B4 | 10 | 1.24 × 105 | 61 | 1.57 × 104 | 21.1 |
| B5 | 100 | 1.24 × 105 | 61 | 4.97 × 105 | 2.11 × 103 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siriano, S.; Balcázar, N.; Tassone, A.; Rigola, J.; Caruso, G. Numerical Simulation of High-Density Ratio Bubble Motion with interIsoFoam. Fluids 2022, 7, 152. https://doi.org/10.3390/fluids7050152
Siriano S, Balcázar N, Tassone A, Rigola J, Caruso G. Numerical Simulation of High-Density Ratio Bubble Motion with interIsoFoam. Fluids. 2022; 7(5):152. https://doi.org/10.3390/fluids7050152
Chicago/Turabian StyleSiriano, Simone, Néstor Balcázar, Alessandro Tassone, Joaquim Rigola, and Gianfranco Caruso. 2022. "Numerical Simulation of High-Density Ratio Bubble Motion with interIsoFoam" Fluids 7, no. 5: 152. https://doi.org/10.3390/fluids7050152
APA StyleSiriano, S., Balcázar, N., Tassone, A., Rigola, J., & Caruso, G. (2022). Numerical Simulation of High-Density Ratio Bubble Motion with interIsoFoam. Fluids, 7(5), 152. https://doi.org/10.3390/fluids7050152