1. Introduction
Dry cohesionless granular materials can be seen as a cluster of discrete macroscopic particles interacting by contact. Examples include seeds, sand, coals, pharmaceutical powders, etc. Despite their apparent simplicity, they show unique bulk properties that are different from other familiar forms of matter such as solids, gases, or liquids. The unusual behavior of granular materials is clearly and simply illustrated in various ordinary processes such as the unique pressure distribution that arises from their storage in bins, known as the Janssen effect [
1,
2,
3,
4,
5]. Different works have been carried out to predict the static stresses in vertical circular silos, which include much more detailed cases such as silos under non-uniform temperature distributions [
6], overall deformation of circular silos [
7], or strong changes in the pressure distribution during emptying regimes caused by defects in the silo structure [
8]. It is worth noting that a linear elasticity approach has been used in previous referenced works.
While assuming that the granular material under pressure has a linear elastic behavior, other authors have theoretically analyzed the behavior of the granular medium undergoing a pressure step within a horizontal cylindrical pipe [
9]. In summary, they found an interesting interplay between the stopping front of the grains and the pressure front, i.e., that the granular front and the pressure front can move with different speeds. Owing to this finding, it is feasible to predict when the grains will be arrested as well as the resulting final equilibrium pressure profile. For us, this model is of great interest because of the occurrence of an acoustic wave propagating at a speed of
, where
is the effective Young’s modulus and
is the bulk density.
Pricking a water-filled balloon is a ludic experiment that reveals surprising effects, such as the sudden liberation and subsequent breaking up of the mass of water [
10] and the accelerated propagation of the crack vertically along the elastic membrane [
11], among others. Moreover, pricking an air-inflated balloon features a complex phenomenon due to the presence of fragmentation patterns of the membrane in a treelike fragmentation network [
12].
However, due to the frictional interaction of each segment with the grains, pricking a spherical sand-filled rubber balloon with a sharp needle does not produce an overall rupture of its elastic film. From an experimental point of view, in order to achieve an extensive break off of the balloon membrane, we directed a flame thrower at it; consequently, the highly stretched membrane yielded very quickly, inducing a rapid peeling away from the granular mass. The ensuing sudden decompression of the granular solid induced a decompression wave traveling inward to the granular mass. As a mechanical response, there is a fast radial expansion or displacement of the granular material which resembles the fragmentation of explosively driven expanding granular shells, where the blast wave front and the particle front travel at different directions and speeds [
13].
In the current work, we experimentally and theoretically study the mechanical response of a mass of cohesionless granular material having a near spherical shape and initial mean radius
when it is suddenly relieved of the compressive radial pressure
p. The rapid radial expansion changes the volume of the body but does not change its shape; such a deformation is a hydrostatic compression, and as such a specific theoretical approach [
14] should be used for this elastic deformation. Our goal is to understand how the granular mass expands elastically as a function of
,
p, and the effective hydrostatic compression modulus
, which is modeled in a simple form. This treatment led us to the discovery of a linear decompression wave which cannot be visualized; instead, we experimentally observed the rapid expansion of the spherical mass, which we understand as a response to the propagation of the elastic wave into the sand mass. The motion of the grains was experimentally tracked by means of high-speed video recording, allowing us to determine that the sand displacement front moves at a constant speed. For prolonged time lapses, gravity dominates and causes the grains to spill, and the model fails to apply.
The division of this work is as follows. In
Section 2, we describe and characterize the materials used in our experiments. In
Section 3, we report a series of experiments involving the systematic bursting of sand-filled balloons of different sizes and provide measurements of the radial displacement of the sand mass as a function of time. In
Section 4, we present the theoretical model of the decompression and its solution in terms of a linear wave. In
Section 5, we provide data for
, used in the computation of the decompression waves, based on a statistical model proposed by Walton [
15],
, and a new estimation based on the elastic approach discussed later on,
; plots of the propagation of the elastic wave are presented as well. Finally, in
Section 6 we provide the main conclusions of this work.
2. Materials
Rubber balloons were filled using the following procedure: first, we filled a bottle with a specific mass
M of Ottawa sand (average diameter
m [
16], bulk density
, packing factor or volume fraction
, angle of repose
rad), which is a standard specially-graded natural silica sand composed of rounded quartz grains with Young’s modulus
GPa, density
, coefficient of restitution
for velocities lower than 1.6 m/s [
17], and Poisson’s ratio
. These last properties were measured elsewhere [
18]; see
Figure 1a. Simultaneously, we inflated the balloon to a desired average radius
by blowing air through the nozzle of a compressor. Then, we attached the mouth of the inflated balloon to the bottleneck, which was kept standing up on top of a table. Then, by rotating the bottle–balloon system 180°, the grains were allowed to flow as driven by gravity, filling the balloon to the brim. Finally, it was sealed and gently formed into a spherical shape. This procedure was used to obtain sand-filled balloons of different average radius and specific mass. The section of the laboratory in which the experiments were carried out was climate controlled (
K and
R.H.).
The value of the absolute pressure exerted by the balloon against the mass of sand when the balloon reaches a given radius
must be determined. Additional experiments were carried out to determine the pressure as a function of the balloon’s radius. We performed measurements of the pressure within the balloon when it was inflating using a Dwyer D1635 pressure transducer, which operates within an absolute pressure range between 0 and 103.24 kPa and operating temperature between 256.15 and 473.15 K, compatible with both liquids and gases. For data acquisition, it was necessary to develop a LabVIEW program, and we used a National Instruments SCB-68 data acquisition module.
Figure 1b shows a typical plot of the inflation pressure
p as a function of the stretched
R during the inflation of a given balloon. Values of the pressure
from this plot, are used in the upcoming computations to determine the corresponding pressure
for a balloon of a given radius
. Incidentally, plots of this type are typical for near-spherical and cylindrical rubber balloons [
19,
20,
21].
The physics of the inflation of rubber balloons evinces a number of interesting facts. The pressure–deformation curve in spherical balloons quickly reaches the maximum pressure (as in this stage the pressure depends on the inverse of the balloon’s radius, which initially is very small); this part of the curve is the first increasing branch. Upon further inflation, the pressure decreases, because the balloon’s radius increases (such a region is the first decreasing branch), after which pressure increases rapidly again until the bursting point. The second ascending branch is due to the ultimate stiffening effect as a result of the influence of the molecular chain structure [
21].
In our experiments, when we filled the balloons, the air volume allowing the radius
to be reach was exchanged for the sand volume, and we assumed that the respective inflation pressure
acts on the granular mass instead. In this sense, the plot in
Figure 1b is useful.
3. Experiments
The fast decompression of the granular mass was experimentally visualized and measured using high-speed photography and digital image processing. We employed a Red Lake model HG-100K/HG-LE high-speed camera to video record the burst of the balloon at 1600 frames per second. In the experiments, rubber balloons were filled with different masses of Ottawa sand, as indicated in
Table 1, which also provides the mean radii (
) reached by the balloons when a certain amount of mass was introduced. After the balloons were filled with sand, they were laid to hang (see
Figure 2) and then burst by exposure to an intense flame produced by a plumber’s blow torch (butane/propane gas). The hottest point was approximately 1372.2 K, though the actual temperature a heated component can attain is much lower than this, and depends on the burner along with the thermal properties of the component and its surroundings. After any burst, we immediately collected the sand manually and no sensitive temperature change was noticed. In the same line, we highlight that if air warming occurs then its density decreases; thus, the ratio of
must be larger than
which was computed at
K. A large value of this quotient indicates that the grain dynamics dominate the air dynamics [
22].
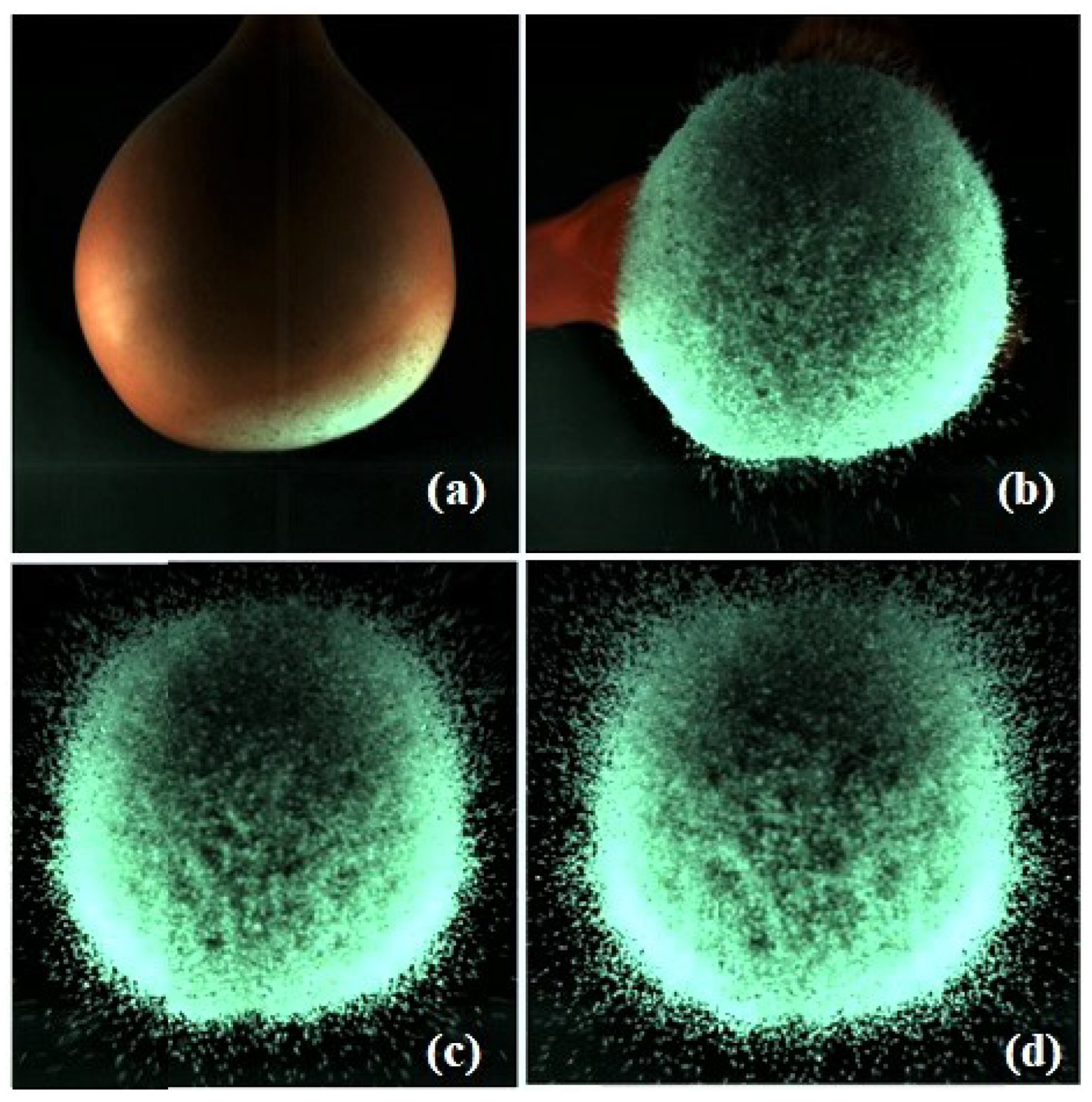
Taking, for instance, a sand filled balloon with a mass of 1.00 kg, upon rupture after exposure to the flame an accelerated peeling of the rubber film from the granular mass takes place.
Figure 3b–d shows a sudden radial expansion of the granular mass, which we assume to be due to a decompression wave that penetrates into the a mass. As shown in
Figure 3b, a dense front of expansion was measured, while in
Figure 3d a very dilute grain cloud can be appreciated. The time range for all of the snapshots in
Figure 3 is lower than 0.02 s. Later, we show that for characteristic times
s the inertial force dominates the hydrostatic compression. In contrast with water balloon bursting, where a vertical crack is observed [
11], in sand-filled balloon bursting the principal curvature radii are near the same, and consequently the crack of the rubber film can propagate along any direction. It is possible that the relatively large size of the interaction region between the flame and the balloon may have some contribution to the indeterminate/unpredictable nature of the crack.
The sudden peeling of the rubber film from the spherical granular masses is so sudden that the effect of gravity (i.e., the downward motion of the center of the cluster mass) was not perceived and can be neglected. Thus, we measured the displacement of the granular front to quantify the expansion produced by the decompression wave when the pressure p of the rubber film is instantly released at .
Essentially, as previously reported in [
23], we used a method to first detect the edge of the balloon
in order to measure of the deformation of spherical mass core, then measured the front of the granular mass
resulting from the burst given its efficiency for granular flows. This method allowed us to track the mean displacement of the granular expanding mass as
with measurements made around a horizontal line originating from the center of mass and reaching to the granular front
.
Figure 4 shows the plot of the radial
displacement for the bulk mass in
Table 1 as a function of time, with data provided for the first 30 frames (0.018 s) in all cases. The lines fitting the symbols indicate the stage of deformation; note that in these cases there is a certain temporal delay after the instant of rupture
s. The deformation rate for each dataset can then be obtained from the slope of the linear fit, as provided in
Table 1.
From
Figure 1b and
Table 1, we highlight that increasing mean radii of the sand balloons produce lower mean pressures, as the radius is in the region of the first decreasing branch of the inflation pressure. In the plot of
Figure 4, the flat part of each radius
refers to the average displacement (provided by the sloped straight lines) starting after a given time, i.e., there is a delay time depending on the radius. This means that the delay time increases for larger masses; in
Section 5 we describe how this behavior can be directly associated with the decompression waves that move inward towards the granular masses, which also present temporal delays.
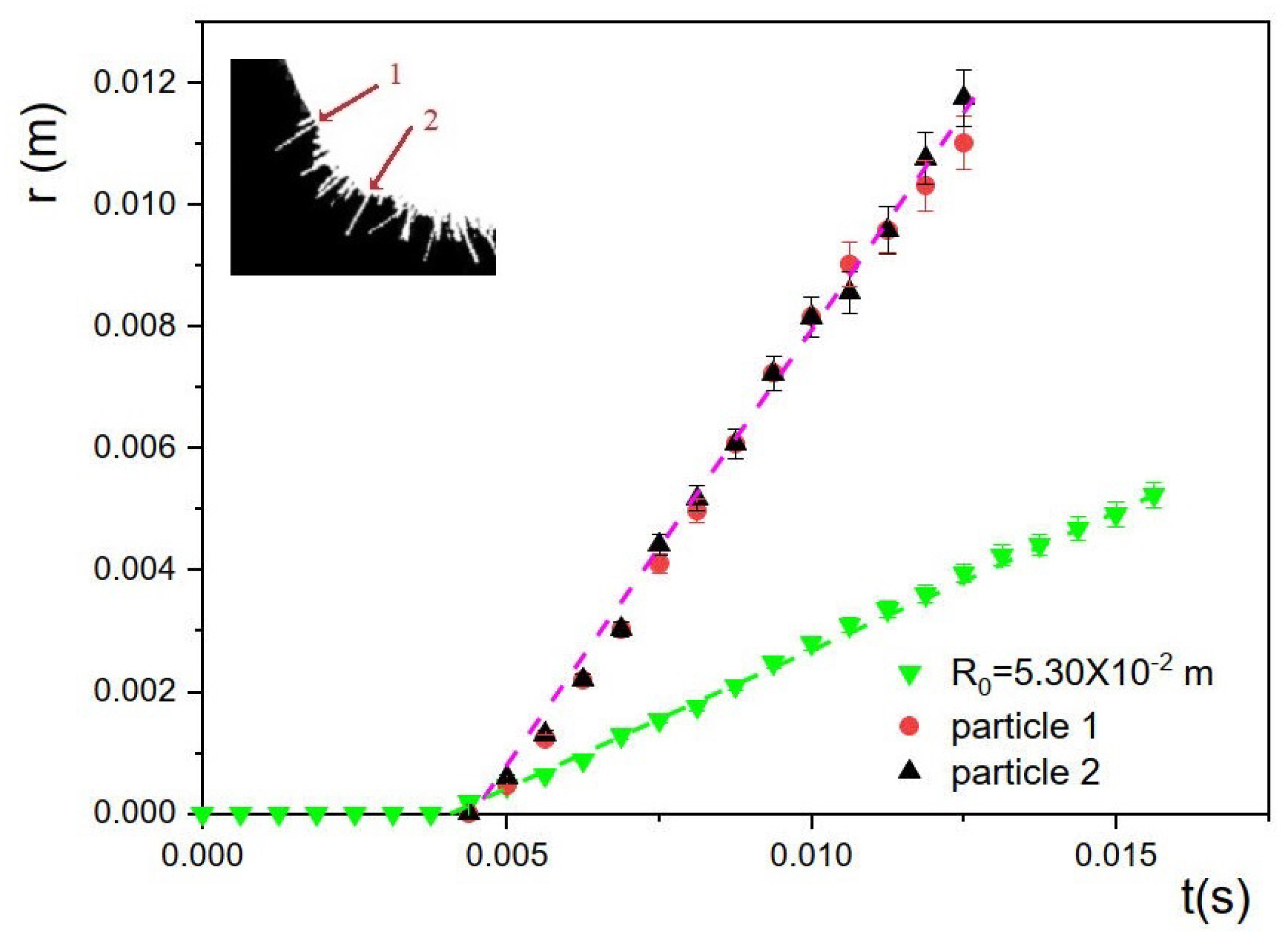
The radial expansion observed in snapshots in
Figure 3 indicates interesting behaviors similar to those occurring in the explosive dispersal process [
24]. An expansion develops close to the free surface during the early time points of sudden decompression, and the dynamics range from a dense granular expansion, as provided by the measurements in
Figure 4, to a dilute gas–solid mixture (
very low), as shown in the inset of
Figure 5. In this latter case, the particles are discrete and far from each other and the probability of a particle–particle collisions is very low; hence, the interactions between the particles can be neglected.
Figure 5 shows that certain particles in the dilute regime (particles 1 and 2 in the inset) rapidly acquire a similar motion to that of the decompression wave except in an opposite direction to the wave itself, whereas large particles respond more slowly due to their larger inertia, as shown in
Figure 4. This phenomenon is explored further in
Section 5. It is very possible that the more external and smaller particles of our sand samples could be part of the dilute regime, both of which reach an average velocity
m/s. We return to this matter later in order to better understand various aspects of the decompression wave.
A last issue concerning the inner structure of the granular mass is related to the possible existence of force chains, which are typical in granular masses subjected to strong compression stresses [
25,
26,
27,
28,
29,
30]. Chain forces in two-dimensional granular materials have been found experimentally through photoelasticity [
25,
26,
27], force sensors [
28], and the use of DEM and lattice Boltzmann simulations [
25,
27].
Transparent materials with a non-crystalline molecular structure are optically isotropic when unstressed, i.e., the polarization of the incident light is not altered by the material. However, such materials become optically anisotropic (birefringent) when placed under stress. The polarization of the incident light in the stressed material is changed in a way similar to the behavior of birefringent crystals. After unloading, the material becomes optically isotropic again.
Measurements show that spatially extended and strong force chains (much larger than the mean force) occur when the applied stresses are large (although these are exponentially rare [
29]); conversely, short and weak force chains are produced for small stresses [
25,
27]. Moreover, the force–force spatial distribution function and contact point radial distribution function indicate that the spatial correlations between the contact forces and positions of the contacts extend out only to approximately three particle diameters. This shows that force correlations dissipate quickly in the bulk and that the force transmission network propagates locally before rapidly becoming diffuse [
30]. Taking all this into account along with the fact that the typical inflation pressures involved in our experiments are relatively small (
Table 1) and that the decompression wave only penetrates small distances with respect to the free surface before the action of gravity begins to play an important role (see
Section 5), it is possible that effect of the chain force on the decompression wave could be marginal.
5. Plots of the Decompression Waves
Now, we show plots of Equation (
7) derived from the values of
p,
, and
in
Table 1 and
Table 2. Specifically, in plots of
Figure 6 and
Figure 7 we use the values of
for our model in
Table 2, as the propagation speeds of the waves
c in each of the three balloons used in the experiments are slightly lower than when the values of
(also provided in
Table 2) were used.
Here, we must remember the result in
Section 4, which states that an order-of-magnitude estimation of the time for which the decompression occurs obeys the inequality
. For the balloon of radius
m, this results in
s, similar to the balloon with radius
m, for which
s, and the balloon with radius
m, for which
s. Times longer than those previously computed imply that the granular masses cease being a connected network of grains.
It is possible to explain the behavior of the elastic waves provided by Equation (
7) graphically.
Figure 6 shows the behavior of the decompression waves
for
r = constant. in
Figure 6a (for
r = 0.03 m) and in
Figure 6b (for
m) this latest value is closer to any initial radius of the balloon compressing the sand, with the initial radii indicated in the inset of each plot. The flat parts in the plots shown in
Figure 6 indicate that the decompression wave arrived at the radial positions
m and
m at different times larger than
; this relationship is obtained from Equation (
7) when the argument
is equal to zero in order to obtain
. For instance, considering the balloon of radius
m, we find that the wave arrives at
m after
s, as is observed in the green dashed line in
Figure 6a, while when
m the wave reaches the same radial position after
s, as is seen in the green dashed line in
Figure 6b. These times are shortest for smaller balloons.
Similarly, the plots of
for
r = constant are provided in
Figure 7. The flat parts occur again if
in this case, we used the formula
which provides the limit at which
. Consequently, for time
t = 0.019 s and
m, the previous formula produces
m, meaning that the wave is flat between
m and between
m and
m, as can be seen in
Figure 7a. In
Figure 7b, when
s,
m between
m and
m. Finally, it can be observed that the other waves have no plane parts.
Now, we can compare the plots in
Figure 4 for the displacements of the granular fronts as the time evolves with the plots in
Figure 6b; both plots can help us to understand that the decompression wave penetrates into the sand mass as a linear wave, while in response the dense sand front evolves in a similar way in the opposite direction and with a reduced velocity. In addition to the dense front, there is a dilute flow of fine particles that is ejected radially; see
Figure 5. In this figure, it can be observed that the particles have a mean radial velocity of
m/s, which is similar to the velocity of the decompression wave of the front, which from Equation (
7) is
. For a balloon inflated at
m, we have
m/s, i.e., both velocities are of the same order of magnitude, despite the value of
being obtained through a series of physical and mathematical approximations used in the theoretical models of the decompression and effective compressibility modulus.
Notably, it is apparent that the dense fronts provided by plots in
Figure 4 occur in response to the decompression wave; moreover, they have rate deformations of around 0.5 m/s in order of magnitude but maintain approximately similar forms to the corresponding decompression waves (comparing the data in
Figure 4 with those in
Figure 6b, the delay times are very similar). These facts lead us to propose the heuristic hypothesis that the rate deformation of the front could be proportional to
, as it yields rate deformations with values of 0.85 m/s for
m, 0.82 m/s for
m, and 0.64 m/s for
m. Obviously, our proposal is very simple and needs many more careful experimental studies before being accepted or denied.
6. Conclusions
In this work, we have experimentally and theoretically shown that the problem of sand balloon bursting is physically interesting and complex. Through the current study, our main purpose was to show that the sudden release of the initially confined granular mass behaves as a genuine elastic body, producing a linear decompression wave that travels into the granular material at the earliest times of the pressure release, and that the sand generates a complex expansion front in response. In order to provide a consistent theoretical treatment, we have proposed a new model to compute the effective compression modulus, which is used in plots shown in
Figure 6 and
Figure 7. This treatment results in waves 12% slower than those computed using the Walton effective compression modulus [
15]. Similarly, by assuming spherical balloons, a theoretical model based on the hydrostatic compression approach has allowed us to analytically find radial decompression waves, which generate radial granular fronts with physical characteristics very similar to those of the elastic wave. Due to the opacity of the granular mass, we could not observe the decompression waves and were only able to detect the effects of the waves through the displacement of the front. For instance, for three balloons of different sizes, it was found that the granular fronts expand in a similar manner to the respective decompression wave; the fronts move at a constant velocity (rate of deformation in
Table 1) after delay times very similar to those of the waves. Through
Figure 5 we found that the front is simultaneously composed of a dense front and a dilute front. At the free surface, it is possible to compute the velocity of the granular front induced by the decompression wave as
. Incidentally, in terms of the order of magnitude, such a velocity appears to be more adequate for the most external radially expelled single grains. We characterized the velocity of the dense front experimentally using the rate of deformation and found it to be slower than
. Due to this, we have proposed, through a heuristic hypothesis, that the velocity of the dense front could simply be equal to the factor
as it is of the same order of magnitude as the rate of deformation. Clearly, such a hypothesis merits further theoretical and experimental studies.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}