
Flow Modeling of a Non-Newtonian Viscous Fluid in Elastic-Wall Microchannels

 , , , , , and
, , , , , and 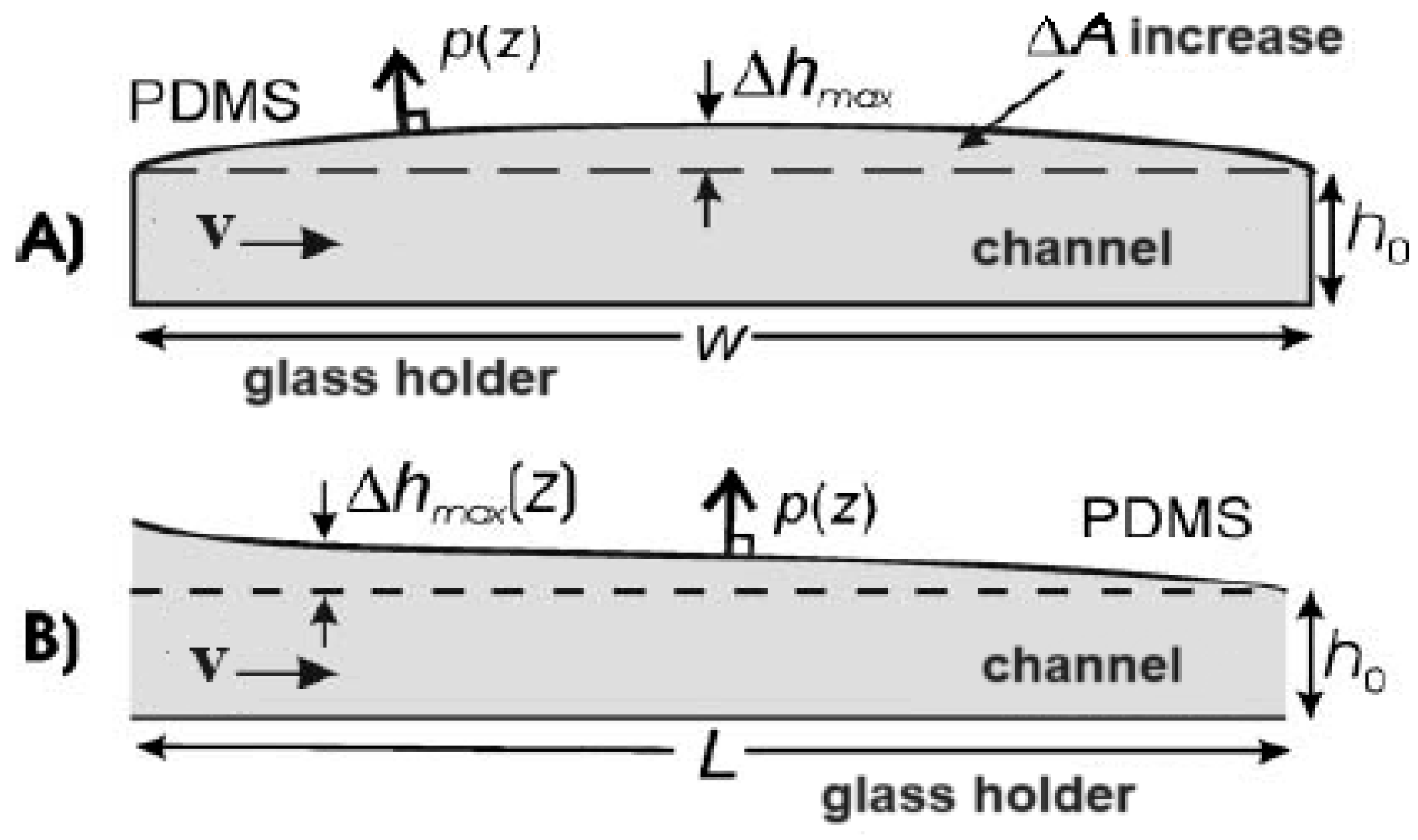{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
Stop-Flow Lithography (SLF) System
2. Flow of a Viscous Non-Newtonian Fluid through a Microchannel with Elastic Walls
2.1. Microchannel Geometry
2.2. PDMS Elasticity Modeling
2.2.1. Fluid Flow Modeling
2.2.2. Coupling between the Elastic Wall and the Flow
3. Results
4. Discussion
5. Concluding Remarks
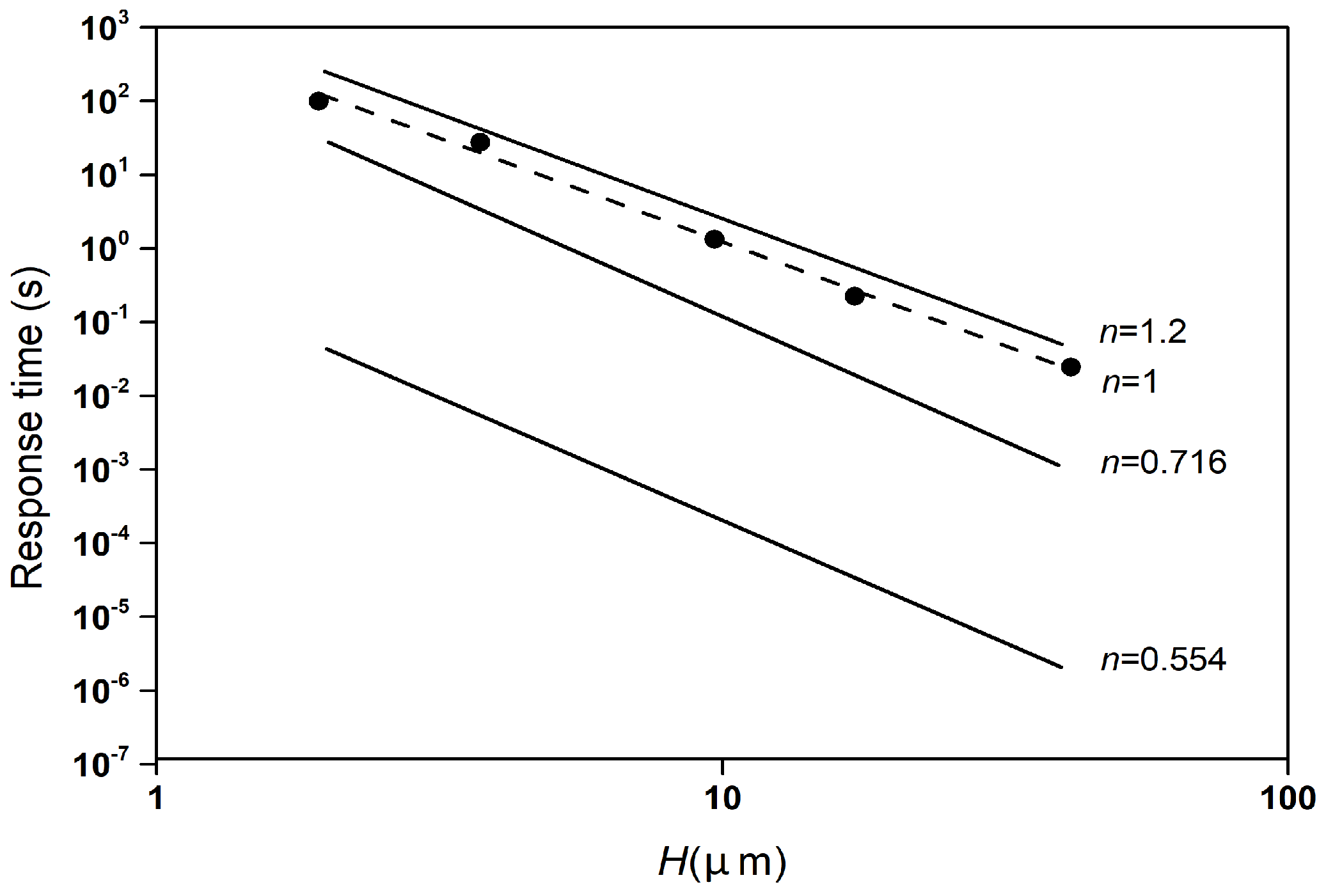
- For a Newtonian fluid (with a power-law exponent ), the model predicts the experimentally measured response times of wall channel deformation for different channel widths, heights and lengths with root-mean-square errors (RMSEs) less than ∼10%.
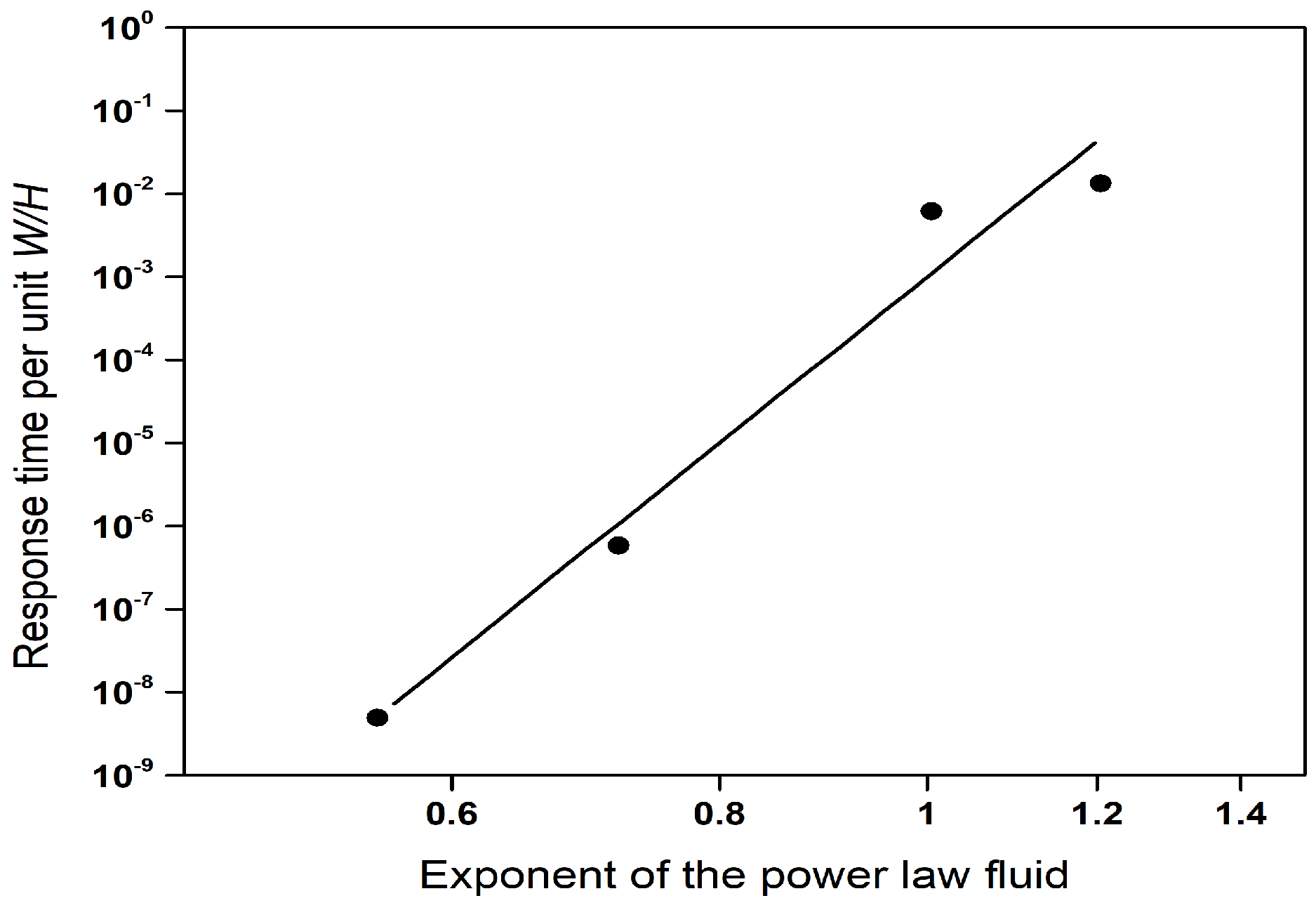
- For pseudoplastic fluids (), the deformation response times are from one to several orders of magnitude shorter than for Newtonian () and dilatant () fluids.
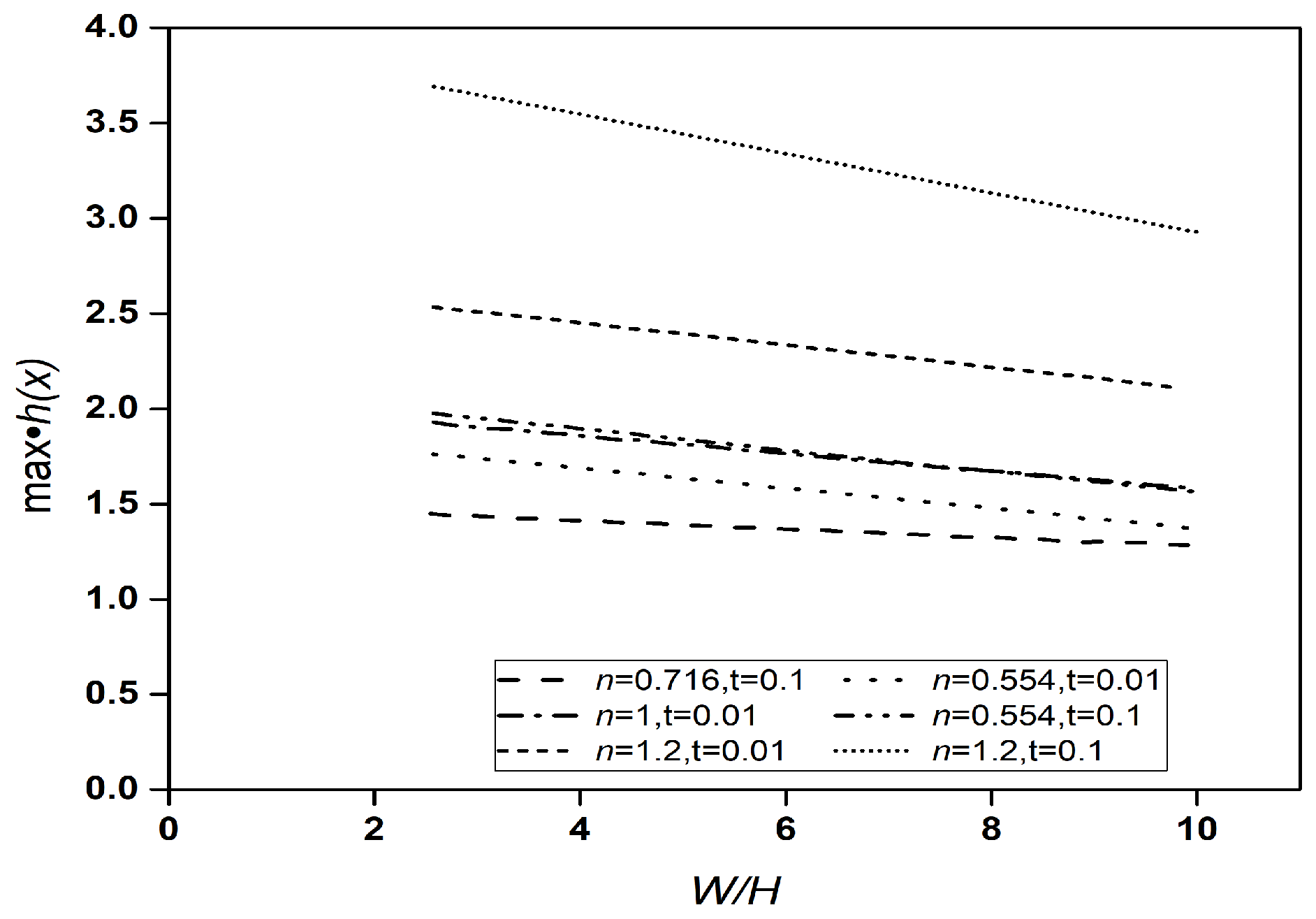
- The maximum channel deformation and the time of flow residence are largely determined by the fluid power-law order and the width-to-height ratio of the elastic channel.
- As a function of the channel width-to-height ratio, the largest maximum wall deformations are observed for the fluid.
- The solution methodology implemented here provides a lower bound to the non-linear problem and the results can be interpreted as a limiting case given by the lubrication approximation.
- In spite of its simplicity, the present model can be used to study the behavior of non-Newtonian power-law fluids applied to the development of novel pharmaceutical microfluidic devices.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| H | Microchannel height (m) |
| L | Microchannel length (cm) |
| W | Microchannel width (m) |
| E | Young modulus (MPa and GPa) |
| Re | Reynolds number (dimensionless) |
| Fluid velocity vector (m ) | |
| Fluid velocity components (cm ) | |
| p | Pressure (psi) |
| Cartesian coordinates (m) | |
| Stress tensor (kg ) | |
| Identity tensor (dimensionless) | |
| n | Power-law exponent (dimensionless) |
| k | Power-law constant (dyn ) |
| q | Dimensionless parameter |
| Deformation function of the microchannel ceiling (m) | |
| Height increase of microchannel ceiling (m) | |
| Maximum height increase (m) | |
| Time of flow residence in the channel (s) | |
| Time of wall response (s) | |
| Time to begin particle polymerization (s) | |
| Time required to flush the particles out (s) | |
| Lower bound for the stop time (s) | |
| Greek letters | |
| Viscosity (mPa s) | |
| Stress applied to produce the deformation (MPa) | |
| Applied deformation (dimensionless) | |
| Shear stress tensor (kg ) | |
| Deformation of the channel ceiling (dimensionless) | |
| Normalized deformation function (dimensionless) | |
| Normalized position along the channel (dimensionless) |
References
- Urban, D.; Takamura, K. (Eds.) Polymer Dispersions and Their Industrial Applications; Wiley-VCH: Hoboken, NJ, USA, 2002. [Google Scholar]
- Lu, Y.; Yin, Y.; Xia, Y. Three-dimensional photonic crystals with non-spherical colloids as building blocks. Adv. Mater. 2001, 13, 415–420. [Google Scholar] [CrossRef]
- Langer, R.; Tirrell, D.A. Designing materials for biology and medicine. Nature 2004, 428, 487–492. [Google Scholar] [CrossRef] [PubMed]
- Finkel, N.H.; Lou, X.; Wang, C.; He, L. Peer reviewed: Barcoding the microworld. Anal. Chem. 2004, 76, 352A–359A. [Google Scholar] [CrossRef] [PubMed]
- Pregibon, D.C.; Toner, M.; Doyle, P.S. Multifunctional encoded particles for high-throughput biomolecule analysis. Science 2007, 315, 1393–1396. [Google Scholar] [CrossRef] [PubMed]
- Steinbacher, J.L.; McQuade, D.T. Polymer chemistry in flow: New polymers, beads, capsules, and fibers. J. Polym. Sci. Part A Polym. Chem. 2006, 44, 6505–6533. [Google Scholar] [CrossRef]
- Kawakatsu, T.; Kikuchi, Y.; Nakajima, M. Regular-sized cell creation in microchannel emulsification by visual microprocessing method. J. Am. Oil Chem. Soc. 1997, 74, 317–321. [Google Scholar] [CrossRef]
- Thorsen, T.; Roberts, R.W.; Arnold, F.H.; Quake, S.R. Dynamic pattern formation in a vesicle-generating microfluidic device. Phys. Rev. Lett. 2001, 86, 4163–4166. [Google Scholar] [CrossRef]
- Shelley, A.L.; Bontoux, N.; Stone, H.A. Formation of dispersions using “flow focusing” in microchannels. Appl. Phys. Lett. 2003, 82, 364–366. [Google Scholar]
- Okushima, S.; Nisisako, T.; Torii, T.; Higuchi, T. Controlled production of monodisperse double emulsions by two-step droplet breakup in microfluidic devices. Langmuir 2004, 20, 9905–9908. [Google Scholar] [CrossRef]
- Utada, A.S.; Lorenceau, E.; Link, D.R.; Kaplan, P.D.; Stone, H.A.; Weitz, D.A. Monodisperse double emulsions generated from a microcapillary device. Science 2005, 308, 537–541. [Google Scholar] [CrossRef]
- Sugiura, S.; Nakajima, M.; Tong, J.; Nabetani, H.; Seki, M. Preparation of monodispersed solid lipid microspheres using a microchannel emulsification technique. J. Colloid Interface Sci. 2000, 227, 95–103. [Google Scholar] [CrossRef]
- Nisisako, T.; Torii, T.; Higuchi, T. Novel microreactors for functional polymer beads. Chem. Eng. J. 2004, 101, 23–29. [Google Scholar] [CrossRef]
- Dendukuri, D.; Tsoi, K.; Hatton, T.A.; Doyle, P.S. Controlled synthesis of nonspherical microparticles using microfluidics. Langmuir 2005, 21, 2113–2116. [Google Scholar] [CrossRef]
- Xu, S.; Nie, Z.; Seo, M.; Lewis, P.; Kumacheva, E.; Stone, H.A.; Garstecki, P.; Weibel, D.B.; Gitlin, I.; Whitesides, G.M. Generation of monodisperse particles by using microfluidics: Control over size, shape, and composition. Angew. Chem. 2005, 44, 724–728. [Google Scholar] [CrossRef]
- Nie, Z.; Xu, S.; Seo, M.; Lewis, P.C.; Kumacheva, E. Polymer particles with various shapes and morphologies produced in continuous microfluidic reactors. J. Am. Chem. Soc. 2005, 127, 8058–8063. [Google Scholar] [CrossRef]
- Nisisako, T.; Torii, T.; Takahashi, T.; Takizawa, Y. Synthesis of monodisperse bicolored Janus particles with electrical anisotropy using a microfluidic Co-Flow system. Adv. Mater. 2006, 18, 1152–1156. [Google Scholar] [CrossRef]
- Shepherd, R.F.; Conrad, J.C.; Rhodes, S.K.; Link, D.R.; Marquez, M.; Weitz, D.A.; Lewis, J.A. Microfluidic assembly of homogeneous and Janus colloid-filled hydrogel granules. Langmuir 2006, 22, 8618–8622. [Google Scholar] [CrossRef] [PubMed]
- Dendukuri, D.; Hatton, T.A.; Doyle, P.S. Synthesis and self-assembly of amphiphilic polymeric microparticles. Langmuir 2007, 23, 4669–4674. [Google Scholar] [CrossRef] [PubMed]
- Decker, C.; Jenkins, A.D. Kinetic approach of oxygen inhibition in ultraviolet-and laser-induced polymerizations. Macromolecules 1985, 18, 1241–1244. [Google Scholar] [CrossRef]
- Glotzer, S.C. Some assembly required. Science 2004, 306, 419–420. [Google Scholar] [CrossRef] [PubMed]
- Dendukuri, D.; Pregibon, D.C.; Collins, J.; Hatton, T.A.; Doyle, P.S. Continuous-flow lithography for high-throughput microparticle synthesis. Nat. Mater. 2006, 5, 365–369. [Google Scholar] [CrossRef] [PubMed]
- Gervais, T.; El-Ali, J.; Günther, A.; Jensen, K.F. Flow-induced deformation of shallow microfluidic channels. Lab Chip 2006, 6, 500–507. [Google Scholar] [CrossRef] [PubMed]
- Dendukuri, D.; Gu, S.S.; Pregibon, D.C.; Hatton, T.A.; Doyle, P.S. Stop-flow lithography in a microfluidic device. Lab Chip 2007, 7, 818–828. [Google Scholar] [CrossRef]
- Bird, R.B.; Steward, W.E.; Lightfoot, E.N. Transport Phenomena; Wiley: Hoboken, NJ, USA, 2006. [Google Scholar]
- Hayes, R.E.; Dannelongue, H.H.; Tanguy, P.A. Numerical simulation of mold filling in reaction injection molding. Polym. Eng. Sci. 1991, 31, 842–848. [Google Scholar] [CrossRef]
- Anand, V.; Christov, I.C. Revisiting steady viscous flow of a generalized Newtonian fluid through a slender elastic tube using shell theory. J. Appl. Math. Mech./Z. Angew. Math. Mech. 2021, 101, e201900309. [Google Scholar] [CrossRef]
- Inamdar, T.C.; Wang, X.; Christov, I.C. Unsteady fluid–structure interactions in a soft-walled microchannel: A one-dimensional lubrication model for finite Reynolds number. Phys. Rev. Fluids 2020, 5, 064101. [Google Scholar] [CrossRef]
- Anand, V.; David, J.; Christov, I.C. Non-Newtonian fluid–structure interactions: Static response of a microchannel due to internal flow of a power-law fluid. J. Non-Newton. Fluid Mech. 2019, 264, 62–72. [Google Scholar] [CrossRef]
- Skotheim, J.M.; Mahadevan, L. Soft lubrication. Phys. Rev. Lett. 2004, 92, 245509. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rubio Martínez, A.; Chávez Castellanos, A.E.; Noguez Méndez, N.A.; Aragón Rivera, F.; Pliego Díaz, M.; Sigalotti, L.D.G.; Vargas, C.A. Flow Modeling of a Non-Newtonian Viscous Fluid in Elastic-Wall Microchannels. Fluids 2024, 9, 77. https://doi.org/10.3390/fluids9030077
Rubio Martínez A, Chávez Castellanos AE, Noguez Méndez NA, Aragón Rivera F, Pliego Díaz M, Sigalotti LDG, Vargas CA. Flow Modeling of a Non-Newtonian Viscous Fluid in Elastic-Wall Microchannels. Fluids. 2024; 9(3):77. https://doi.org/10.3390/fluids9030077
Chicago/Turabian StyleRubio Martínez, A., A. E. Chávez Castellanos, N. A. Noguez Méndez, F. Aragón Rivera, M. Pliego Díaz, L. Di G. Sigalotti, and C. A. Vargas. 2024. "Flow Modeling of a Non-Newtonian Viscous Fluid in Elastic-Wall Microchannels" Fluids 9, no. 3: 77. https://doi.org/10.3390/fluids9030077
APA StyleRubio Martínez, A., Chávez Castellanos, A. E., Noguez Méndez, N. A., Aragón Rivera, F., Pliego Díaz, M., Sigalotti, L. D. G., & Vargas, C. A. (2024). Flow Modeling of a Non-Newtonian Viscous Fluid in Elastic-Wall Microchannels. Fluids, 9(3), 77. https://doi.org/10.3390/fluids9030077