
Recent Advances in Magnetically Actuated Droplet Manipulation for Biomedical Applications


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Magnetic Manipulations of Droplet
2.1. Magnetic Actuation Based on Permanent Magnets or Electromagnets
2.2. Magnetic Force and Interface Resistance
2.3. The Driving Mechanisms for Magnetic Droplet Manipulation
2.3.1. Magnetic Particles

2.3.2. Ferrofluids
2.3.3. Liquid Marbles
2.3.4. Droplet Manipulation by Magnetic Flexible Substrates
2.4. Droplet Manipulation
2.4.1. Droplet Generation
2.4.2. Droplet Transportation and Sorting
2.4.3. Droplet Split
2.4.4. Droplet Fusion and Mixing
2.4.5. Other Manipulation
3. Biomedical Applications
3.1. Biomedical Diagnostic Applications
3.1.1. Sample Preparation
3.1.2. Nucleic Acid Detection
3.1.3. Protein Detection
3.1.4. Bacteria and Virus Detection
3.1.5. Other Molecules Detection
3.2. Drug Discovery
3.3. Cell Culture
4. Conclusions and Future Prospects
Author Contributions
Funding
Conflicts of Interest
References
- Miskin, M.Z.; Jaeger, H.M. Droplet formation and scaling in dense suspensions. Proc. Natl. Acad. Sci. USA 2012, 109, 4389–4394. [Google Scholar] [CrossRef]
- Ermakov, A.V.; Chapek, S.V.; Lengert, E.V.; Konarev, P.V.; Volkov, V.V.; Artemov, V.V.; Soldatov, M.A.; Trushina, D.B. Microfluidically Assisted Synthesis of Calcium Carbonate Submicron Particles with Improved Loading Properties. Micromachines 2024, 15, 16. [Google Scholar] [CrossRef] [PubMed]
- Qian, J.; Lan, H.; Huang, L.; Zheng, S.; Hu, X.; Chen, M.; Lee, J.E.; Zhang, W. Acoustofluidics for simultaneous droplet transport and centrifugation facilitating ultrasensitive biomarker detection. Lab Chip 2023, 23, 4343–4351. [Google Scholar] [CrossRef]
- Shao, K.; Jiang, S.; Hu, Y.; Zhang, Y.; Li, C.; Zhang, Y.; Li, J.; Wu, D.; Chu, J. Bioinspired Lubricated Slippery Magnetic Responsive Microplate Array for High Performance Multi-Substance Transport. Adv. Funct. Mater. 2022, 32, 2205831. [Google Scholar] [CrossRef]
- Liu, D.; Sun, M.; Zhang, J.; Hu, R.; Fu, W.; Xuanyuan, T.; Liu, W. Single-cell droplet microfluidics for biomedical applications. Analyst 2022, 147, 2294–2316. [Google Scholar] [CrossRef]
- Wu, J.; Fang, D.; Zhou, Y.; Gao, G.; Zeng, J.; Zeng, Y.; Zheng, H. Multifunctional droplet handling on surface-charge-graphic-decorated porous papers. Lab Chip 2024, 24, 594–603. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.; Snyder, D.; Sathyan, A.; Balazs, A.; Emrick, T. Smart Droplets Stabilized by Designer Surfactants: From Biomimicry to Active Motion to Materials Healing. Adv. Funct. Mater. 2023, 33, 2306819. [Google Scholar] [CrossRef]
- Wu, W.; Bai, H.; Yang, Y.; Li, G.; Chen, Z.; Tang, C.; Yin, H.; Lai, L.; Liu, J.; Xuan, S.; et al. Sequence liquid manipulation on a multifunctional snowflake-patterned interface with dual unidirectional wettability. J. Mater. 2023, 11, 8873–8885. [Google Scholar] [CrossRef]
- Yao, J.; He, C.; Wang, J.; Yang, C.; Jiang, Y.; Liu, Z.; Liao, G.; Shi, T. A novel integrated microfluidic chip for on-demand electrostatic droplet charging and sorting. Bio-Des. Manuf. 2024, 7, 31–42. [Google Scholar] [CrossRef]
- Mohamadzade Sani, H.; Falahi, M.; Aieneh, K.; Hosseinalipour, S.M.; Salehi, S.; Asiaei, S. Performance optimization of droplet formation and break up within a microfluidic device–Numerical and experimental evaluation. Int. J. Heat Fluid Flow 2024, 106, 109266. [Google Scholar] [CrossRef]
- Takken, M.; Wille, R. Simulation of Pressure-Driven and Channel-Based Microfluidics on Different Abstract Levels: A Case Study. Sensors 2022, 22, 5392. [Google Scholar] [CrossRef] [PubMed]
- Zhu, G.P.; Wang, Q.Y.; Ma, Z.K.; Wu, S.H.; Guo, Y.P. Droplet Manipulation under a Magnetic Field: A Review. Biosensors 2022, 12, 156. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Wang, X.; Huang, Q.; He, X. Droplet manipulation on an adjustable closed-open digital microfluidic system utilizing asymmetric EWOD. Lab Chip 2023, 24, 8–19. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Lee, D.; Choi, M.; Chung, S.K. AC EWOD-induced asymmetric droplet oscillation and manipulation. Sens. Actuator A Phys. 2022, 347, 113910. [Google Scholar] [CrossRef]
- Dimov, N.; McDonnell, M.B.; Munro, I.; McCluskey, D.K.; Johnston, I.D.; Tan, C.K.L.; Coudron, L. Electrowetting-based digital microfluidics platform for automated enzyme-linked immunosorbent assay. J. Vis. Exp. 2020, 2020, e60489. [Google Scholar] [CrossRef]
- Barman, J.; Shao, W.; Tang, B.; Yuan, D.; Groenewold, J.; Zhou, G. Wettability manipulation by interface-localized liquid dielectrophoresis: Fundamentals and applications. Micromachines 2019, 10, 329. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Jamieson, W.D.; Dimitriou, P.; Xu, W.; Rohde, P.; Martinac, B.; Baker, M.; Drinkwater, B.W.; Castell, O.K.; Barrow, D.A. Building programmable multicompartment artificial cells incorporating remotely activated protein channels using microfluidics and acoustic levitation. Nat. Commun. 2022, 13, 4125. [Google Scholar] [CrossRef]
- Liu, C.; Huang, J.; Guo, Z.; Liu, W. A magnetic responsive composite surface for high-performance droplet and bubble manipulation. Chem. Commun. 2022, 58, 11119–11122. [Google Scholar] [CrossRef]
- Cui, G.; Jacobi, I. Magnetic Control of Ferrofluid Droplet Adhesion in Shear Flow and on Inclined Surfaces. Langmuir 2020, 36, 10885–10891. [Google Scholar] [CrossRef]
- Yang, C.; Zhang, Z.; Li, G. Programmable droplet manipulation by combining a superhydrophobic magnetic film and an electromagnetic pillar array. Sens. Actuators B Chem. 2018, 262, 892–901. [Google Scholar] [CrossRef]
- Bansal, S.; Sen, P. On-Chip Magnetic Bead and Nanoparticle Separation in Compound Droplet EWOD. In Proceedings of the NEMS 2018–13th Annual IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Grand Hyatt, Singapore, 22–26 April 2018; pp. 471–474. [Google Scholar]
- Wang, F.; Liu, M.; Liu, C.; Huang, C.; Zhang, L.; Cui, A.; Hu, Z.; Du, X. Light control of droplets on photo-induced charged surfaces. Natl. Sci. Rev 2023, 10, nwac164. [Google Scholar] [CrossRef] [PubMed]
- Luo, T.; Liu, S.; Zhou, R.; Zhang, C.; Chen, D.; Zhan, Y.; Hu, Q.; He, X.; Xie, Y.; Huan, Z.; et al. Contactless acoustic tweezer for droplet manipulation on superhydrophobic surfaces. Lab Chip 2023, 23, 3989–4001. [Google Scholar] [CrossRef] [PubMed]
- Cai, G.; Yang, Z.; Chen, Y.-C.; Huang, Y.; Liang, L.; Feng, S.; Zhao, J. Magnetic Bead Manipulation in Microfluidic Chips for Biological Application. CBS 2023, 4, 0023. [Google Scholar] [CrossRef] [PubMed]
- Kokalj, T.; Pérez-Ruiz, E.; Lammertyn, J. Building bio-assays with magnetic particles on a digital microfluidic platform. New Biotechnol. 2015, 32, 485–503. [Google Scholar] [CrossRef] [PubMed]
- Cheng, H.; Liu, H.; Li, W.; Li, M. Recent advances in magnetic digital microfluidic platforms. Electrophoresis 2021, 42, 2329–2346. [Google Scholar] [CrossRef] [PubMed]
- Tang, X.; Li, W.; Wang, L. Furcated droplet motility on crystalline surfaces. Nat. Nanotechnol. 2021, 16, 1106–1112. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Hassan, M.R.; Rallabandi, B.; Wang, C. Migration of ferrofluid droplets in shear flow under a uniform magnetic field. Soft Matter 2019, 15, 2439–2446. [Google Scholar] [CrossRef]
- Manabe, K.; Saito, K.; Nakano, M.; Ohzono, T.; Norikane, Y. Light-Driven Liquid Conveyors: Manipulating Liquid Mobility and Transporting Solids on Demand. ACS Nano 2022, 16, 16353–16362. [Google Scholar] [CrossRef] [PubMed]
- Yang, C.; Zeng, Q.; Huang, J.; Guo, Z. Droplet manipulation on superhydrophobic surfaces based on external stimulation: A review. Adv. Colloid Interface Sci. 2022, 306, 102724. [Google Scholar] [CrossRef] [PubMed]
- Long, C.; Chen, R.; Zhai, C.; Chen, F.; Yang, C. Review on magnetic droplet generation and manipulation in microchips. Chin. J. Process Eng. 2020, 20, 1134–1146. [Google Scholar] [CrossRef]
- Pan, C.; Park, S.; Gao, L.; Chiou, E.P.Y. Dynamic magnetic manipulation using electric field addressed ferrofluidic droplets. In Proceedings of the IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Tucson, AZ, USA, 13–17 January 2008; pp. 637–640. [Google Scholar]
- Liu, Z.H.; Huang, Y.F.; Li, J.P.; Xu, X.W. The research of a new method for manipulating magnetic beads through multi-layered flat micro-coils coupled with permanent magnet. Adv. Mater. Res. 2013, 735–755, 1571–1575. [Google Scholar] [CrossRef]
- Pittiglio, G.; Brockdorff, M.; Da Veiga, T.; Davy, J.; Chandler, J.H.; Valdastri, P. Collaborative Magnetic Manipulation via Two Robotically Actuated Permanent Magnets. IEEE Trans. Robot. 2023, 39, 1407–1418. [Google Scholar] [CrossRef]
- Quan, W.; Ma, L.; Fan, J.; Chen, Y.; Zheng, Q.; Bian, B.; Zhang, J.; Du, J. Tripling magnetic energy product in magnetic hard/soft nanocomposite permanent magnets. Mater. Today Phys. 2022, 26, 100750. [Google Scholar] [CrossRef]
- Lee, J.J.; Pua, C.H.; Misran, M.; Lee, P.F. The rotational effect of magnetic particles on cellular apoptosis based on four electromagnet feedback control system. Biomed. Eng. 2021, 33, 2150045. [Google Scholar] [CrossRef]
- Yang, C.; Ning, Y.; Ku, X.; Zhuang, G.; Li, G. Automatic magnetic manipulation of droplets on an open surface using a superhydrophobic electromagnet needle. Sens. Actuators B Chem. 2018, 257, 409–418. [Google Scholar] [CrossRef]
- Kim, J.H.; Kang, S.M.; Lee, B.J.; Ko, H.; Bae, W.G.; Suh, K.Y.; Kwak, M.K.; Jeong, H.E. Remote Manipulation of Droplets on a Flexible Magnetically Responsive Film. Sci. Rep. 2015, 5, 17843. [Google Scholar] [CrossRef]
- Park, Y.; Lee, K.Y.; Won, T.; Kim, M.; Song, H.; Hong, J.; Chung, S.K. Magnetically maneuverable three-dimensional digital microfluidic manipulation of magnetic droplets for biochemical applications. Jpn. J. Appl. Phys 2021, 60, 076504. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, J.; Liu, J.; Wang, Y.; Zhang, M.; Xiang, H. Design of Programmable Droplet Manipulation Platform Based on Magnetic Control. In Proceedings of the 2022 12th International Conference on CYBER Technology in Automation, Control, and Intelligent Systems, CYBER 2022, Baishan, China, 27–31 July 2022; pp. 1224–1229. [Google Scholar]
- Lu, P.-H.; Ma, Y.-D.; Fu, C.-Y.; Lee, G.-B. A structure-free digital microfluidic platform for detection of influenza a virus by using magnetic beads and electromagnetic forces. Lab Chip 2020, 20, 789–797. [Google Scholar] [CrossRef] [PubMed]
- Li, D.; Yun, J.; Chen, S.; Cui, B.; Guo, X.; Wu, K.; Zuo, Y.; Yang, D.; Wang, J.; Xi, L. Joule heating and temperature effects on current-induced magnetization switching in perpendicularly magnetized Pt/Co/C structures. J. Phys. D Appl. Phys. 2018, 51, 265003. [Google Scholar] [CrossRef]
- Okochi, M.; Tsuchiya, H.; Kumazawa, F.; Shikida, M.; Honda, H. Droplet-based gene expression analysis using a device with magnetic force-based-droplet-handling system. J. Biosci. Bioeng. 2010, 109, 193–197. [Google Scholar] [CrossRef]
- Biswas, S.; Pomeau, Y.; Chaudhury, M.K. New Drop Fluidics Enabled by Magnetic-Field-Mediated Elastocapillary Transduction. Langmuir 2016, 32, 6860–6870. [Google Scholar] [CrossRef]
- Nguyen, N.T.; Ng, K.M.; Huang, X. Manipulation of ferrofluid droplets using planar coils. Appl. Phys. Lett. 2006, 89, 052509. [Google Scholar] [CrossRef]
- Sarkhosh, M.H.; Yousefi, M.; Bijarchi, M.A.; Nejat Pishkenari, H.; Forghani, K. Manipulation of ferrofluid marbles and droplets using repulsive force in magnetic digital microfluidics. Sens. Actuator A Phys. 2023, 363, 114733. [Google Scholar] [CrossRef]
- Guo, S.; Yang, Q.; Bai, L.; Zhao, Y. Development of multiple capsule robots in pipe. Micromachines 2018, 9, 259. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Timonen, J.V.I.; Carlson, A.; Drotlef, D.M.; Zhang, C.T.; Kolle, S.; Grinthal, A.; Wong, T.S.; Hatton, B.; Kang, S.H.; et al. Multifunctional ferrofluid-infused surfaces with reconfigurable multiscale topography. Nature 2018, 559, 77–82. [Google Scholar] [CrossRef]
- Huang, G.; Li, M.; Yang, Q.; Li, Y.; Liu, H.; Yang, H.; Xu, F. Magnetically actuated droplet manipulation and its potential biomedical applications. ACS Appl. Mater. Interfaces 2017, 9, 1155–1166. [Google Scholar] [CrossRef] [PubMed]
- Rismani Yazdi, S.; Agrawal, P.; Morales, E.; Stevens, C.A.; Oropeza, L.; Davies, P.L.; Escobedo, C.; Oleschuk, R.D. Facile actuation of aqueous droplets on a superhydrophobic surface using magnetotactic bacteria for digital microfluidic applications. Anal. Chim. Acta 2019, 1085, 107–116. [Google Scholar] [CrossRef] [PubMed]
- Long, Z.; Shetty, A.M.; Solomon, M.J.; Larson, R.G. Fundamentals of magnet-actuated droplet manipulation on an open hydrophobic surface. Lab Chip 2009, 9, 1567–1575. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Xu, Z.; Parhizkar, M.; Fang, J.; Wang, X.; Lin, T. Magnetic liquid marbles, their manipulation and application in optical probing. Microfluid. Nanofluid. 2012, 13, 555–564. [Google Scholar] [CrossRef]
- Bormashenko, E.; Pogreb, R.; Whyman, G.E.; Musin, A.; Bormashenko, Y.; Barkay, Z. Shape, vibrations, and effective surface tension of water marbles. Langmuir ACS J. Surf. Colloids 2009, 25, 1893–1896. [Google Scholar] [CrossRef]
- Bormashenko, E.; Pogreb, R.; Bormashenko, Y.; Musin, A.; Stein, T. New investigations on ferrofluidics: Ferrofluidic marbles and magnetic-field-driven drops on superhydrophobic surfaces. Langmuir 2008, 24, 12119–12122. [Google Scholar] [CrossRef] [PubMed]
- Shin, D.J.; Wang, T.H. Magnetic Droplet Manipulation Platforms for Nucleic Acid Detection at the Point of Care. Ann. Biomed. Eng. 2014, 42, 2289–2302. [Google Scholar] [CrossRef] [PubMed]
- Al-Hetlani, E.; Amin, M.O. Continuous magnetic droplets and microfluidics: Generation, manipulation, synthesis and detection. Microchim. Acta 2019, 186, 55. [Google Scholar] [CrossRef] [PubMed]
- Azizian, P.; Mohammadrashidi, M.; Abbas Azimi, A.; Bijarchi, M.A.; Shafii, M.B.; Nasiri, R. Magnetically Driven Manipulation of Nonmagnetic Liquid Marbles: Billiards with Liquid Marbles. Micromachines 2023, 14, 49. [Google Scholar] [CrossRef] [PubMed]
- Nandi, R.; Mishra, S.; Maji, T.K.; Manna, K.; Kar, P.; Banerjee, S.; Dutta, S.; Sharma, S.K.; Lemmens, P.; Saha, K.D.; et al. A novel nanohybrid for cancer theranostics: Folate sensitized Fe2O3 nanoparticles for colorectal cancer diagnosis and photodynamic therapy. J. Mater. Chem. B 2017, 5, 3927–3939. [Google Scholar] [CrossRef] [PubMed]
- Mittal, A.; Roy, I.; Gandhi, S. Magnetic Nanoparticles: An Overview for Biomedical Applications. Magnetochemistry 2022, 8, 107. [Google Scholar] [CrossRef]
- Siciliano, G.; Monteduro, A.G.; Turco, A.; Primiceri, E.; Rizzato, S.; Depalo, N.; Curri, M.L.; Maruccio, G. Polydopamine-Coated Magnetic Iron Oxide Nanoparticles: From Design to Applications. Nanomaterials 2022, 12, 1145. [Google Scholar] [CrossRef] [PubMed]
- Jameel, B.; Hornowski, T.; Bielas, R.; Józefczak, A. Ultrasound Study of Magnetic and Non-Magnetic Nanoparticle Agglomeration in High Viscous Media. Materials 2022, 15, 3450. [Google Scholar] [CrossRef] [PubMed]
- Trick, A.Y.; Stark, A.; Shin, D.J.; Wang, T.H. A parallelized droplet magnetofluidic platform for automated detection of cancer methylation biomarkers. In Proceedings of the 22nd International Conference on Miniaturized Systems for Chemistry and Life Sciences, MicroTAS 2018, Kaohsiung, Taiwan, 11–15 November 2018; pp. 318–321. [Google Scholar]
- Chen, Y.C.; Teng, T.H.; Tsai, J.S.C.; Huang, H.D.; Chang, Y.L.; Liang, C.W. Single-Tube reaction using perfluorocarbons: A prerequisite step leading to the whole- slide in situ technique on histopathological slides. PLoS ONE 2016, 11, e0158018. [Google Scholar] [CrossRef]
- Wang, B.; Wang, Y.; Lin, J.; Zhang, Y.; Zhou, X. A swarm of liquid metal microdroplets for recyclable catalysis with high spatial-temporal precision. Appl. Mater 2023, 34, 101903. [Google Scholar] [CrossRef]
- Kim, S.; Park, Y.G.; Kim, J.Y.; Kim, E.; Lee, D.H.; Lee, J.H.; Cheon, J.; Park, J.U. Magnetic Manipulation of Locomotive Liquid Electrodes for Wireless Active Cardiac Monitoring. ACS Appl. Mater. Interfaces 2023, 15, 28954–28963. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Ni, M.; Wu, J.; Xuan, S.; Gong, X. Hard-magnetic liquid metal droplets with excellent magnetic field dependent mobility and elasticity. J. Mater. Sci. Technol. 2021, 92, 60–68. [Google Scholar] [CrossRef]
- Zheng, Y.-H.; Cheng, Y.; Bao, F.; Wang, Y.-S. Synthesis and magnetic properties of Fe3O4 nanoparticles. Mater. Res. Bull. 2006, 41, 525–529. [Google Scholar] [CrossRef]
- Hu, D.; Lai, H.; Liu, Y.; Song, Y.; Luo, X.; Zhang, D.; Fan, Z.; Xie, Z.; Cheng, Z. Magnetic Gradient Slippery Surfaces with Shape Memory Property for Smart Sliding Control of Superparamagnetic Droplet. Chem. J. Chin. Univ. 2023, 44, 20220442. [Google Scholar] [CrossRef]
- Yang, Z.; Ren, M.; Li, Y.; Zhou, M.; Peng, J.; Lin, S.; Du, K.; Huang, X. Fully Integrated Microfluidic Device for Magnetic Bead Manipulation to Assist Rapid Reaction and Cleaning. Anal. Chem. 2023, 95, 14934–14943. [Google Scholar] [CrossRef] [PubMed]
- Nagarajan, B.; Qureshi, A.; Aguilera, A.F.E.; Mertiny, P. Additive manufacturing of magnetically loaded polymer composites: An experimental study for process development. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Proceedings (IMECE), Tampa, FL, USA, 3–9 November 2017. [Google Scholar]
- Sperling, M.; Kim, H.J.; Velev, O.D.; Gradzielski, M. Active Steerable Catalytic Supraparticles Shuttling on Preprogrammed Vertical Trajectories. Adv. Mater. Interfaces 2016, 3, 1600095. [Google Scholar] [CrossRef]
- Wang, J.; Wang, X.; Li, Y.; Si, H.; Chen, C.; Wang, J.; Long, Z.; Nandakumar, K. Preparation and properties of magnetic polymer microspheres. Polymer 2020, 199, 122569. [Google Scholar] [CrossRef]
- Huang, S.; Guo, W.; An, J.; Zhang, J.; Dong, F.; Wang, D.; Feng, F.; Zhang, J. Enhanced Acoustic Droplet Vaporization through the Active Magnetic Accumulation of Drug-Loaded Magnetic Particle-Encapsulated Nanodroplets (MPE-NDs) in Cancer Therapy. Nano Lett. 2022, 22, 8143–8151. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.; Wei, J.; Sobolev, Y.I.; Grzybowski, B.A. Systems of mechanized and reactive droplets powered by multi-responsive surfactants. Nature 2018, 553, 313–318. [Google Scholar] [CrossRef]
- Timonen, J.; Latikka, M.; Leibler, L.; Ras, R.; Ikkala, O. Switchable static and dynamic self-assembly of magnetic droplets on superhydrophobic surfaces. Science 2013, 341, 253–257. [Google Scholar] [CrossRef]
- Yang, C.; Li, G. A novel magnet-actuated droplet manipulation platform using a floating ferrofluid film. Sci. Rep. 2017, 7, 15705. [Google Scholar] [CrossRef]
- Wu, X.; Streubel, R.; Liu, X.; Kim, P.Y.; Chai, Y.; Hu, Q.; Wang, D.; Fischer, P.; Russell, T.P. Ferromagnetic liquid droplets with adjustable magnetic properties. Proc. Natl. Acad. Sci. USA 2021, 118, e2017355118. [Google Scholar] [CrossRef]
- Forth, J.; French, D.J.; Gromov, A.V.; King, S.; Titmuss, S.; Lord, K.M.; Ridout, M.J.; Wilde, P.J.; Clegg, P.S. Temperature- and pH-Dependent Shattering: Insoluble Fatty Ammonium Phosphate Films at Water-Oil Interfaces. Langmuir 2015, 31, 9312–9324. [Google Scholar] [CrossRef]
- Xu, R.; Liu, T.; Sun, H.; Wang, B.; Shi, S.; Russell, T.P. Interfacial Assembly and Jamming of Polyelectrolyte Surfactants: A Simple Route To Print Liquids in Low-Viscosity Solution. ACS Appl. Mater. Interfaces 2020, 12, 18116–18122. [Google Scholar] [CrossRef]
- Qian, B.; Shi, S.; Wang, H.; Russell, T.P. Reconfigurable Liquids Stabilized by DNA Surfactants. ACS Appl. Mater. Interfaces 2020, 12, 13551–13557. [Google Scholar] [CrossRef]
- Shi, S.; Qian, B.; Wu, X.; Sun, H.; Wang, H.; Zhang, H.B.; Yu, Z.Z.; Russell, T.P. Self-Assembly of MXene-Surfactants at Liquid-Liquid Interfaces: From Structured Liquids to 3D Aerogels. Angew. Chem. Int. Ed. Engl. 2019, 58, 18171–18176. [Google Scholar] [CrossRef]
- Seul, M.; Andelman, D. Domain shapes and patterns: The phenomenology of modulated phases. Science 1995, 267, 476–483. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Tao, R.; Wu, J.; Li, B.; Hao, C. Impingement-assisted self-assembly of ferrofluid droplets under magnetic field. Appl. Phys. Lett. 2021, 119, 041601. [Google Scholar] [CrossRef]
- Bormashenko, E.; Bormashenko, Y.; Musin, A.; Barkay, Z. On the mechanism of floating and sliding of liquid marbles. Chemphyschem 2009, 10, 654–656. [Google Scholar] [CrossRef] [PubMed]
- Khaw, M.K.; Ooi, C.H.; Mohd-Yasin, F.; Vadivelu, R.; John, J.S.; Nguyen, N.T. Digital microfluidics with a magnetically actuated floating liquid marble. Lab Chip 2016, 16, 2211–2218. [Google Scholar] [CrossRef]
- Bormashenko, E.; Pogreb, R.; Whyman, G.; Musin, A. Surface tension of liquid marbles. Colloids Surf. Physicochem. Eng. Aspects 2009, 351, 78–82. [Google Scholar] [CrossRef]
- Arbatan, T.; Li, L.; Tian, J.; Shen, W. Liquid marbles as micro-bioreactors for rapid blood typing. Adv. Healthc. Mater. 2012, 1, 80–83. [Google Scholar] [CrossRef] [PubMed]
- Alp, G.; Alp, E.; Aydogan, N. Magnetic liquid marbles to facilitate rapid manipulation of the oil phase: Synergistic effect of semifluorinated ligand and catanionic surfactant mixtures. Colloids Surf. Physicochem. Eng. Asp. 2020, 585, 124051. [Google Scholar] [CrossRef]
- Mohammadrashidi, M.; Bijarchi, M.A.; Shafii, M.B.; Taghipoor, M. Experimental and Theoretical Investigation on the Dynamic Response of Ferrofluid Liquid Marbles to Steady and Pulsating Magnetic Fields. Langmuir 2023, 39, 2246–2259. [Google Scholar] [CrossRef] [PubMed]
- Kang, S.M.; Lee, C.; Kim, H.N.; Lee, B.J.; Lee, J.E.; Kwak, M.K.; Suh, K.Y. Directional oil sliding surfaces with hierarchical anisotropic groove microstructures. Adv. Mater. 2013, 25, 5756–5761. [Google Scholar] [CrossRef] [PubMed]
- Chen, G.; Gao, Y.; Li, M.; Ji, B.; Tong, R.; Law, M.K.; Wen, W.; Zhou, B. Rapid and flexible actuation of droplets via a low-adhesive and deformable magnetically functionalized membrane. J. Mater. Sci. 2018, 53, 13253–13263. [Google Scholar] [CrossRef]
- Guo, J.; Wang, D.; Sun, Q.; Li, L.; Zhao, H.; Wang, D.; Cui, J.; Chen, L.; Deng, X. Omni-Liquid Droplet Manipulation Platform. Adv. Mater. Interfaces 2019, 6, 1900653. [Google Scholar] [CrossRef]
- Cui, J.; Huang, T.-Y.; Luo, Z.; Testa, P.; Gu, H.; Chen, X.-Z.; Nelson, B.J.; Heyderman, L.J. Nanomagnetic encoding of shape-morphing micromachines. Nature 2019, 575, 164–168. [Google Scholar] [CrossRef] [PubMed]
- Hwang, G.; Kim, B.; Toyokura, A.; Mita, Y.; Higo, A. Miniaturized soft transformable swimmer for evironmentally friendly and sustainable fluidic carrier. In Proceedings of the 2021 Symposium on Design, Test, Integration and Packaging of MEMS and MOEMS, DTIP 2021, Pont-a-Mousson, France, 11–13 July 2021. [Google Scholar]
- Zhang, Y.; Wang, T.H. Droplet immobilization, splitting, metering and aliquoting with surface energy traps created using SU8 shadow mask. In Proceedings of the 16th International Conference on Miniaturized Systems for Chemistry and Life Sciences, MicroTAS 2012, Okawa, Japan, 28 October–1 November 2012; pp. 73–75. [Google Scholar]
- Kanitthamniyom, P.; Zhang, Y. Magnetic digital microfluidics on a bioinspired surface for point-of-care diagnostics of infectious disease. Electrophoresis 2019, 40, 1178–1185. [Google Scholar] [CrossRef] [PubMed]
- Ng, A.H.C.; Choi, K.; Luoma, R.P.; Robinson, J.M.; Wheeler, A.R. Digital microfluidic magnetic separation for particle-based immunoassays. Anal. Chem. 2012, 84, 8805–8812. [Google Scholar] [CrossRef]
- Lei, K.M.; Mak, P.I.; Law, M.K.; Martins, R.P. NMR–DMF: A modular nuclear magnetic resonance–digital microfluidics system for biological assays. Analyst 2014, 139, 6204–6213. [Google Scholar] [CrossRef] [PubMed]
- Fan, X.; Sun, M.; Sun, L.; Xie, H. Ferrofluid Droplets as Liquid Microrobots with Multiple Deformabilities. Adv. Funct. Mater. 2020, 30, 2000138. [Google Scholar] [CrossRef]
- Hettiarachchi, S.; Melroy, G.; Mudugamuwa, A.; Sampath, P.; Premachandra, C.; Amarasinghe, R.; Dau, V. Design and development of a microfluidic droplet generator with vision sensing for lab-on-a-chip devices. Sens. Actuator A Phys. 2021, 332, 113047. [Google Scholar] [CrossRef]
- AlHetlani, E.; Hatt, O.J.; Vojtíšek, M.; Tarn, M.D.; Pamme, N. Magnetic droplets–Generation and manipulation in continuous flow. In Proceedings of the 14th International Conference on Miniaturized Systems for Chemistry and Life Sciences 2010, MicroTAS 2010, Groningen, The Netherlands, 3–7 October 2010; pp. 1817–1819. [Google Scholar]
- Amiri Roodan, V.; Gómez-Pastora, J.; Karampelas, I.H.; González-Fernández, C.; Bringas, E.; Ortiz, I.; Chalmers, J.J.; Furlani, E.P.; Swihart, M.T. Formation and manipulation of ferrofluid droplets with magnetic fields in a microdevice: A numerical parametric study. Soft Matter 2020, 16, 9506–9518. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Tan, S.-H.; Yap, Y.F.; Ng, M.Y.; Nguyen, N.-T. Numerical and experimental investigations of the formation process of ferrofluid droplets. Microfluid. Nanofluid. 2011, 11, 177–187. [Google Scholar] [CrossRef]
- Harischandra, P.A.D.; Välisalmi, T.; Cenev, Z.M.; Linder, M.B.; Zhou, Q. Shaping Liquid Droplets on an Active Air-Ferrofluid Interface. Langmuir 2023, 39, 7623–7631. [Google Scholar] [CrossRef] [PubMed]
- Ohashi, T.; Kuyama, H.; Hanafusa, N.; Togawa, Y. A simple device using magnetic transportation for droplet-based PCR. Biomed. Microdevices 2007, 9, 695–702. [Google Scholar] [CrossRef]
- Zhan, Y.; Yu, S.; Amirfazli, A.; Siddiqui, A.R.; Li, W. Magnetically Responsive Superhydrophobic Surfaces for Microdroplet Manipulation. Adv. Mater. Interfaces 2022, 9, 2102010. [Google Scholar] [CrossRef]
- Ben, S.; Zhou, T.; Ma, H.; Yao, J.; Ning, Y.; Tian, D.; Liu, K.; Jiang, L. Multifunctional Magnetocontrollable Superwettable-Microcilia Surface for Directional Droplet Manipulation. Adv. Sci. 2019, 6, 1900834. [Google Scholar] [CrossRef]
- Yuan, S.; Lai, P.T.; Shum, A.H.C.; Pong, P.W.T. Magnetic-Particle-Encapsulated Alginate Beads for Aqueous-Based Bacteria Culturing and Manipulation. IEEE Trans. Magn. 2022, 58, 5200205. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, Y.; Cho, S.K. Efficient in-droplet separation of magnetic particles for digital microfluidics. J. Micromech. Microeng. 2007, 17, 2148–2156. [Google Scholar] [CrossRef]
- Prieto-López, L.O.; Xu, J.; Cui, J. Magnetic-responsive bendable nozzles for open surface droplet manipulation. Polymers 2019, 11, 1792. [Google Scholar] [CrossRef] [PubMed]
- Jiang, S.; Li, B.; Zhao, J.; Wu, D.; Zhang, Y.; Zhao, Z.; Zhang, Y.; Yu, H.; Shao, K.; Zhang, C.; et al. Magnetic Janus origami robot for cross-scale droplet omni-manipulation. Nat. Commun. 2023, 14, 5455. [Google Scholar] [CrossRef] [PubMed]
- Lin, J.L.; Hsu, P.P.; Kuo, J.N. Magnetic Beads inside Droplets for Agitation and Splitting Manipulation by Utilizing a Magnetically Actuated Platform. Micromachines 2023, 14, 1349. [Google Scholar] [CrossRef] [PubMed]
- Gu, S.Q.; Zhang, Y.X.; Zhu, Y.; Du, W.B.; Yao, B.; Fang, Q. Multifunctional picoliter droplet manipulation platform and its application in single cell analysis. Anal. Chem 2011, 83, 7570–7576. [Google Scholar] [CrossRef] [PubMed]
- Song, W.B.; Ding, Z.; Son, C.; Ziaie, B. Aqueous microdrop manipulation and mixing using ferrofluid dynamics. Appl. Phys. Lett 2007, 90, 092501. [Google Scholar] [CrossRef]
- Chen, G.; Ji, B.; Gao, Y.; Wang, C.; Wu, J.; Zhou, B.; Wen, W. Towards the rapid and efficient mixing on ‘open-surface’ droplet-based microfluidics via magnetic actuation. Sens. Actuators B Chem. 2019, 286, 181–190. [Google Scholar] [CrossRef]
- Chen, G.; Dai, Z.; Li, S.; Huang, Y.; Xu, Y.; She, J.; Zhou, B. Magnetically Responsive Film Decorated with Microcilia for Robust and Controllable Manipulation of Droplets. ACS Appl. Mater. Interfaces 2021, 13, 1754–1765. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Zhao, P.; Gu, F.; Xie, J.; Xia, N.; He, Y.; Fu, J. Single-Ring Magnetic Levitation Configuration for Object Manipulation and Density-Based Measurement. Anal. Chem 2018, 90, 9226–9233. [Google Scholar] [CrossRef]
- Vergauwe, N.; Vermeir, S.; Wacker, J.B.; Ceyssens, F.; Cornaglia, M.; Puers, R.; Gijs, M.A.M.; Lammertyn, J.; Witters, D. A highly efficient extraction protocol for magnetic particles on a digital microfluidic chip. Sens. Actuators B Chem. 2014, 196, 282–291. [Google Scholar] [CrossRef]
- Hu, S.; Wang, B.; Luo, Q.; Zeng, R.; Zhang, J.; Cheng, J. Advances in Droplet-Based Microfluidic High-Throughput Screening of Engineered Strains and Enzymes Based on Ultraviolet, Visible, and Fluorescent Spectroscopy. Fermentation 2024, 10, 33. [Google Scholar] [CrossRef]
- Shields, C.W.t.; Ohiri, K.A.; Szott, L.M.; López, G.P. Translating microfluidics: Cell separation technologies and their barriers to commercialization. Cytometry B Clin. Cytom. 2017, 92, 115–125. [Google Scholar] [CrossRef]
- Valihrach, L.; Androvic, P.; Kubista, M. Platforms for Single-Cell Collection and Analysis. Int. J. Mol. Sci. 2018, 19, 807. [Google Scholar] [CrossRef] [PubMed]
- Frenea-Robin, M.; Marchalot, J. Basic Principles and Recent Advances in Magnetic Cell Separation. Magnetochemistry 2022, 8, 11. [Google Scholar] [CrossRef]
- Abedini-Nassab, R.; Pouryosef Miandoab, M.; Şaşmaz, M. Microfluidic Synthesis, Control, and Sensing of Magnetic Nanoparticles: A Review. Micromachines 2021, 12, 768. [Google Scholar] [CrossRef]
- Xu, R.; Ouyang, L.; Chen, H.; Zhang, G.; Zhe, J. Recent Advances in Biomolecular Detection Based on Aptamers and Nanoparticles. Biosensors 2023, 13, 474. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Y.; Wang, Y.; Zhu, W.; Li, G.; Ma, X.; Zhang, Y.; Chen, S.; Tiwari, S.; Shi, K.; et al. Comprehensive understanding of magnetic hyperthermia for improving antitumor therapeutic efficacy. Theranostics 2020, 10, 3793–3815. [Google Scholar] [CrossRef]
- Trinh, T.N.D.; Do, H.D.K.; Nam, N.N.; Dan, T.T.; Trinh, K.T.L.; Lee, N.Y. Droplet-Based Microfluidics: Applications in Pharmaceuticals. Pharmaceuticals 2023, 16, 937. [Google Scholar] [CrossRef]
- Arango, D.; Cifuentes, J.; Puentes, P.R.; Beltran, T.; Bittar, A.; Ocasión, C.; Muñoz-Camargo, C.; Bloch, N.I.; Reyes, L.H.; Cruz, J.C. Tailoring Magnetite-Nanoparticle-Based Nanocarriers for Gene Delivery: Exploiting CRISPRa Potential in Reducing Conditions. Nanomaterials 2023, 13, 1782. [Google Scholar] [CrossRef]
- Santos, L.F.; Silva, A.S.; Mano, J.F. Magnetic-Based Strategies for Regenerative Medicine and Tissue Engineering. Adv. Healthc. Mater. 2023, 12, e2300605. [Google Scholar] [CrossRef]
- D’Onofrio, V.; Manzo, N.; Guerra, A.; Landi, A.; Baro, V.; Määttä, S.; Weis, L.; Porcaro, C.; Corbetta, M.; Antonini, A.; et al. Combining Transcranial Magnetic Stimulation and Deep Brain Stimulation: Current Knowledge, Relevance and Future Perspectives. Brain Sci. 2023, 13, 349. [Google Scholar] [CrossRef] [PubMed]
- Geraldes, C.F.G.C. Rational Design of Magnetic Nanoparticles as T1–T2 Dual-Mode MRI Contrast Agents. Molecules 2024, 29, 1352. [Google Scholar] [CrossRef] [PubMed]
- Irkham, I.; Ibrahim, A.U.; Pwavodi, P.C.; Al-Turjman, F.; Hartati, Y.W. Smart Graphene-Based Electrochemical Nanobiosensor for Clinical Diagnosis: Review. Sensors 2023, 23, 2240. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Cui, H.; Binks, B.P.; Shum, H.C. Liquid Marbles under Electric Fields: New Capabilities for Non-wetting Droplet Manipulation and Beyond. Langmuir 2022, 38, 9721–9740. [Google Scholar] [CrossRef] [PubMed]
- Pan, J.; Hu, P.; Guo, Y.; Hao, J.; Ni, D.; Xu, Y.; Bao, Q.; Yao, H.; Wei, C.; Wu, Q.; et al. Combined Magnetic Hyperthermia and Immune Therapy for Primary and Metastatic Tumor Treatments. ACS Nano 2020, 14, 1033–1044. [Google Scholar] [CrossRef] [PubMed]
- Hanoglu, S.B.; Man, E.; Harmanci, D.; Tozan Ruzgar, S.; Sanli, S.; Keles, N.A.; Ayden, A.; Tuna, B.G.; Duzgun, O.; Ozkan, O.F.; et al. Magnetic Nanoparticle-Based Electrochemical Sensing Platform Using Ferrocene-Labelled Peptide Nucleic Acid for the Early Diagnosis of Colorectal Cancer. Biosensors 2022, 12, 736. [Google Scholar] [CrossRef] [PubMed]
- Navi, M.; Abbasi, N.; Salari, A.; Tsai, S.S.H. Magnetic water-in-water droplet microfluidics: Systematic experiments and scaling mathematical analysis. Biomicrofluidics 2020, 14, 024101. [Google Scholar] [CrossRef] [PubMed]
- Yao, Y.; Lv, T.; Chen, Z.; Li, H.; Li, N.; Yang, Y.; Qian, G.; Wang, X.; Cao, S.; Chen, T. High-Performance Tubular Electricity Generators Operated by Magnetically Driving Movement of Droplet. Adv. Mater. 2020, 7, 2001592. [Google Scholar] [CrossRef]
- Yang, C.; Gan, X.; Zeng, Y.; Xu, Z.; Xu, L.; Hu, C.; Ma, H.; Chai, B.; Hu, S.; Chai, Y. Advanced design and applications of digital microfluidics in biomedical fields: An update of recent progress. Biosens. Bioelectron. 2023, 242, 115723. [Google Scholar] [CrossRef]
- Li, M.; Wan, L.; Law, M.-K.; Meng, L.; Jia, Y.; Mak, P.-I.; Martins, R.P. One-shot high-resolution melting curve analysis for KRAS point-mutation discrimination on a digital microfluidics platform. Lab Chip 2022, 22, 537–549. [Google Scholar] [CrossRef]
- Yue, X.; Fang, X.; Sun, T.; Yi, J.; Kuang, X.; Guo, Q.; Wang, Y.; Gu, H.; Xu, H. Breaking through the Poisson Distribution: A compact high-efficiency droplet microfluidic system for single-bead encapsulation and digital immunoassay detection. Biosens. Bioelectron. 2022, 211, 114384. [Google Scholar] [CrossRef]
- Leipert, J.; Tholey, A. Miniaturized sample preparation on a digital microfluidics device for sensitive bottom-up microproteomics of mammalian cells using magnetic beads and mass spectrometry-compatible surfactants. Lab Chip 2019, 19, 3490–3498. [Google Scholar] [CrossRef] [PubMed]
- Sista, R.; Hua, Z.; Thwar, P.; Sudarsan, A.; Srinivasan, V.; Eckhardt, A.; Pollack, M.; Pamula, V. Development of a digital microfluidic platform for point of care testing. Lab Chip 2008, 8, 2091–2104. [Google Scholar] [CrossRef] [PubMed]
- Gorgannezhad, L.; Umer, M.; Islam, M.N.; Nguyen, N.T.; Shiddiky, M.J.A. Circulating tumor DNA and liquid biopsy: Opportunities, challenges, and recent advances in detection technologies. Lab Chip 2018, 18, 1174–1196. [Google Scholar] [CrossRef] [PubMed]
- Bettegowda, C.; Sausen, M.; Leary, R.J.; Kinde, I.; Wang, Y.; Agrawal, N.; Bartlett, B.R.; Wang, H.; Luber, B.; Alani, R.M.; et al. Detection of circulating tumor DNA in early- and late-stage human malignancies. Sci. Transl. Med. 2014, 6, 224ra224. [Google Scholar] [CrossRef] [PubMed]
- Shen, H.; Dong, L.; Gao, Y.; Wang, X.; Dai, X. Integrated Microwell Array-Based Microfluidic Chip with a Hand-Held Smartphone-Controlled Device for Nucleic Acid Detection. Anal. Chem. 2023, 95, 15394–15399. [Google Scholar] [CrossRef] [PubMed]
- Dhar, B.C.; Roche, C.E.; Levine, J.F. Developing mitochondrial DNA field-compatible tests. Crit. Rev. Environ. Sci. Technol. 2022, 52, 3137–3177. [Google Scholar] [CrossRef]
- Lebofsky, R.; Decraene, C.; Bernard, V.; Kamal, M.; Blin, A.; Leroy, Q.; Rio Frio, T.; Pierron, G.; Callens, C.; Bieche, I.; et al. Circulating tumor DNA as a non-invasive substitute to metastasis biopsy for tumor genotyping and personalized medicine in a prospective trial across all tumor types. Mol. Oncol. 2015, 9, 783–790. [Google Scholar] [CrossRef] [PubMed]
- Tian, H.; Hühmer, A.F.R.; Landers, J.P. Evaluation of Silica Resins for Direct and Efficient Extraction of DNA from Complex Biological Matrices in a Miniaturized Format. Anal. Biochem. 2000, 283, 175–191. [Google Scholar] [CrossRef] [PubMed]
- Perez-Toralla, K.; Pereiro, I.; Garrigou, S.; Di Federico, F.; Proudhon, C.; Bidard, F.C.; Viovy, J.L.; Taly, V.; Descroix, S. Microfluidic extraction and digital quantification of circulating cell-free DNA from serum. Sens. Actuators B Chem. 2019, 286, 533–539. [Google Scholar] [CrossRef]
- Geng, Z.; Li, S.; Zhu, L.; Cheng, Z.; Jin, M.; Liu, B.; Guo, Y.; Liu, P. “Sample-to-Answer” Detection of Rare ctDNA Mutation from 2 mL Plasma with a Fully Integrated DNA Extraction and Digital Droplet PCR Microdevice for Liquid Biopsy. Anal. Chem. 2020, 92, 7240–7248. [Google Scholar] [CrossRef]
- Nanayakkara, I.A.; Cao, W.; White, I.M. Simplifying Nucleic Acid Amplification from Whole Blood with Direct Polymerase Chain Reaction on Chitosan Microparticles. Anal. Chem. 2017, 89, 3773–3779. [Google Scholar] [CrossRef] [PubMed]
- Sista, R.S.; Eckhardt, A.E.; Srinivasan, V.; Pollack, M.G.; Palanki, S.; Pamula, V.K. Heterogeneous immunoassays using magnetic beads on a digital microfluidic platform. Lab Chip 2008, 8, 2188–2196. [Google Scholar] [CrossRef] [PubMed]
- Jin, K.; Hu, C.; Hu, S.; Hu, C.; Li, J.; Ma, H. “One-to-three” droplet generation in digital microfluidics for parallel chemiluminescence immunoassays. Lab Chip 2021, 21, 2892–2900. [Google Scholar] [CrossRef]
- Wang, Y.; Ruan, Q.; Lei, Z.C.; Lin, S.C.; Zhu, Z.; Zhou, L.; Yang, C. Highly Sensitive and Automated Surface Enhanced Raman Scattering-based Immunoassay for H5N1 Detection with Digital Microfluidics. Anal. Chem. 2018, 90, 5224–5231. [Google Scholar] [CrossRef] [PubMed]
- Yuan, S.; Zhang, Y.; Nan, L.; Lai, P.T.; Zhang, T.; Pong, P.W.T.; Shum, H.C. High-Throughput Generation, Manipulation, and Degradation of Magnetic Nanoparticle-Laden Alginate Core-Shell Beads for Single Bacteria Culturing Analysis. IEEE Trans Nanobiosci. 2023, 22, 487–497. [Google Scholar] [CrossRef] [PubMed]
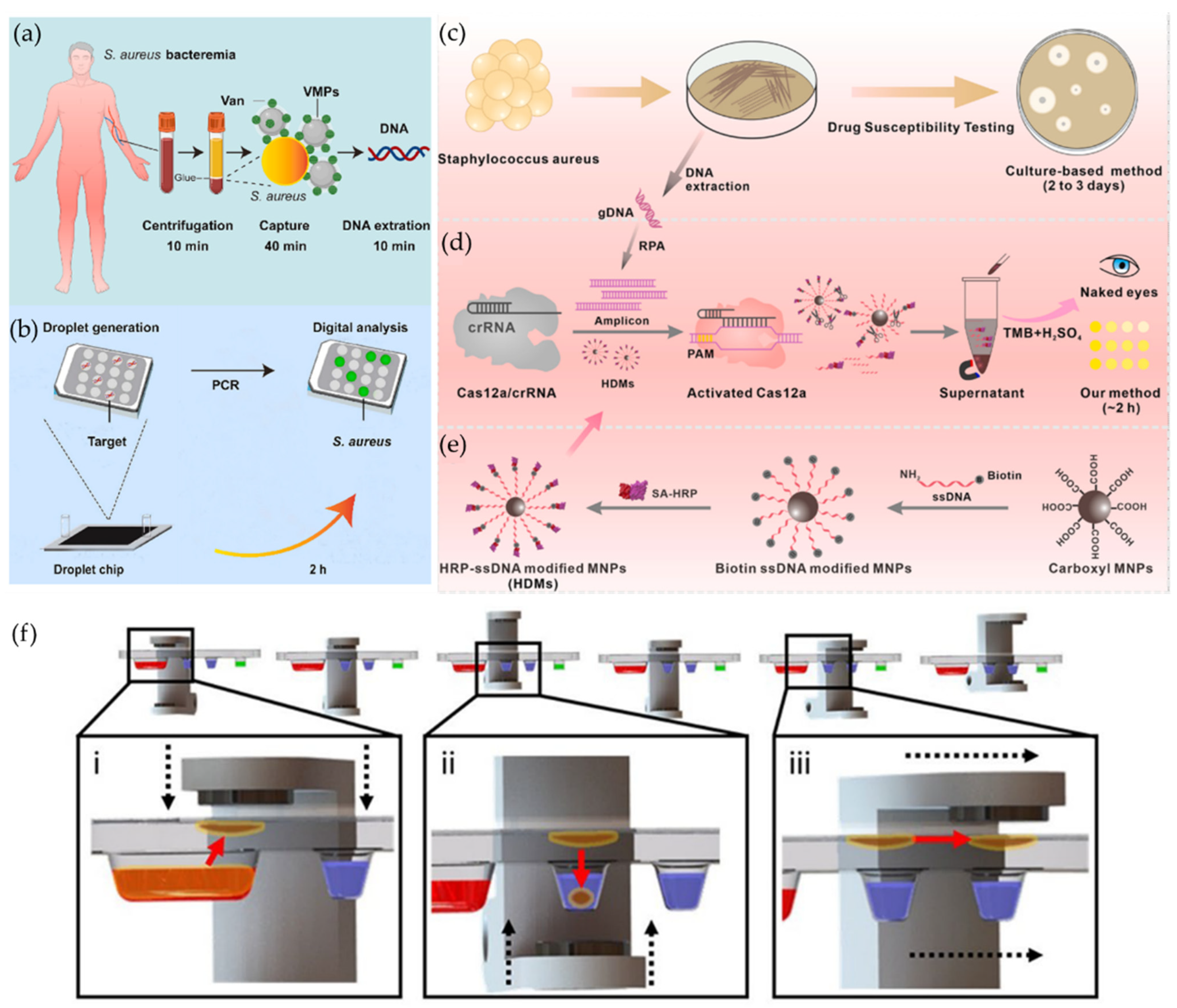
- Wang, Y.; Xu, J.; Cao, L.; Yang, S.; Zhao, L.; He, L.; Shen, Z.; Lin, W.; Shi, B.; Liu, Q.; et al. Nanoparticles-based Culture-free method for rapid and sensitive detection of Staphylococcus aureus in bloodstream infections. Microchem. J. 2023, 191, 108803. [Google Scholar] [CrossRef]
- Wu, X.; Jin, D.; Ni, W.; Wang, F.; Zhang, Y.; Zhang, G.J. CRISPR/Cas12a coupling with RPA and MNPs for rapid and visualized identification of methicillin-resistant Staphylococcus aureus. Sens. Actuators B Chem. 2023, 382, 133546. [Google Scholar] [CrossRef]
- Shin, D.J.; Trick, A.Y.; Hsieh, Y.H.; Thomas, D.L.; Wang, T.H. Sample-to-Answer Droplet Magnetofluidic Platform for Point-of-Care Hepatitis C Viral Load Quantitation. Sci. Rep. 2018, 8, 9793. [Google Scholar] [CrossRef]
- Chen, Y.; Sha, L.; Li, W.; Zhou, L.; Pei, B.; Bian, X.; Ji, Y.; Liu, Y.; Wang, L.; Yang, H. Rapid quantitative detection of Klebsiella pneumoniae in infants with severe infection disease by point-of-care immunochromatographic technique based on nanofluorescent microspheres. Front. Bioeng. Biotechnol. 2023, 11, 1144463. [Google Scholar] [CrossRef] [PubMed]
- Meggiolaro, A.; Moccia, V.; Sammarco, A.; Brun, P.; Damanti, C.C.; Crestani, B.; Mussolin, L.; Pierno, M.; Mistura, G.; Zappulli, V.; et al. Droplet microfluidic platform for extracellular vesicle isolation based on magnetic bead handling. Sens. Actuators B Chem. 2024, 409, 135583. [Google Scholar] [CrossRef]
- Wu, T.; Yang, Y.; Cao, Y.; Huang, Y.; Xu, L.-P.; Zhang, X.; Wang, S. Enhanced lateral flow assay with double conjugates for the detection of exosomes. Sci. China Chem. 2018, 61, 1423–1429. [Google Scholar] [CrossRef]
- Morales-Kastresana, A.; Telford, B.; Musich, T.A.; McKinnon, K.; Clayborne, C.; Braig, Z.; Rosner, A.; Demberg, T.; Watson, D.C.; Karpova, T.S.; et al. Labeling Extracellular Vesicles for Nanoscale Flow Cytometry. Sci. Rep. 2017, 7, 1878. [Google Scholar] [CrossRef] [PubMed]
- Doldán, X.; Fagúndez, P.; Cayota, A.; Laíz, J.; Tosar, J.P. Electrochemical Sandwich Immunosensor for Determination of Exosomes Based on Surface Marker-Mediated Signal Amplification. Anal. Chem. 2016, 88, 10466–10473. [Google Scholar] [CrossRef] [PubMed]
- Tian, Y.; Ma, L.; Gong, M.; Su, G.; Zhu, S.; Zhang, W.; Wang, S.; Li, Z.; Chen, C.; Li, L.; et al. Protein Profiling and Sizing of Extracellular Vesicles from Colorectal Cancer Patients via Flow Cytometry. ACS Nano 2018, 12, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Xu, X.; Li, B.; Situ, B.; Pan, W.; Hu, Y.; An, T.; Yao, S.; Zheng, L. Single-Exosome-Counting Immunoassays for Cancer Diagnostics. Nano Lett. 2018, 18, 4226–4232. [Google Scholar] [CrossRef]
- Wei, X.; Cai, L.; Chen, H.; Shang, L.; Zhao, Y.; Sun, W. Noninvasive Multiplexed Analysis of Bladder Cancer-Derived Urine Exosomes via Janus Magnetic Microspheres. Anal. Chem. 2022, 94, 18034–18041. [Google Scholar] [CrossRef]
- Shen, X.; Yang, Y.; Chen, Y.; Zhou, C.; Zhao, X.; Li, N.; Lou, C.; Huang, Y.; Tian, D.; Shen, Y.; et al. Evaluation of EpCAM-specific exosomal lncRNAs as potential diagnostic biomarkers for lung cancer using droplet digital PCR. J. Mol. Med. (Berl.) 2022, 100, 87–100. [Google Scholar] [CrossRef] [PubMed]
- Ahi, E.E.; Torul, H.; Zengin, A.; Sucularlı, F.; Yıldırım, E.; Selbes, Y.; Suludere, Z.; Tamer, U. A capillary driven microfluidic chip for SERS based hCG detection. Biosens. Bioelectron. 2022, 195, 113660. [Google Scholar] [CrossRef]
- Moura, S.L.; Fajardo, L.M.; Cunha, L.d.A.; Sotomayor, M.D.P.T.; Machado, F.B.C.; Ferrão, L.F.A.; Pividori, M.I. Theoretical and experimental study for the biomimetic recognition of levothyroxine hormone on magnetic molecularly imprinted polymer. Biosens. Bioelectron. 2018, 107, 203–210. [Google Scholar] [CrossRef]
- Mak, K.K.; Pichika, M.R. Artificial intelligence in drug development: Present status and future prospects. Drug Discov. Today 2019, 24, 773–780. [Google Scholar] [CrossRef] [PubMed]
- Lombardi, D.; Dittrich, P.S. Droplet microfluidics with magnetic beads: A new tool to investigate drug-protein interactions. Anal. Bioanal. Chem. 2011, 399, 347–352. [Google Scholar] [CrossRef] [PubMed]
- Mitrelias, T.; Trypiniotis, T.; Palfreyman, J.J.; Hong, B.; Vyas, K.; Hayward, T.J.; Llandro, J.; Kopper, K.P.; Bland, J.A.C.; Robertson, P.A.; et al. Digital magnetic tagging for multiplexed suspension-based biochemical assays. J. Appl. Phys. 2009, 105, 07B301. [Google Scholar] [CrossRef]
- Virlogeux, A.; Moutaux, E.; Christaller, W.; Genoux, A.; Bruyère, J.; Fino, E.; Charlot, B.; Cazorla, M.; Saudou, F. Reconstituting Corticostriatal Network on-a-Chip Reveals the Contribution of the Presynaptic Compartment to Huntington’s Disease. Cell Rep. 2018, 22, 110–122. [Google Scholar] [CrossRef]
- Li, H.; Liu, P.; Kaur, G.; Yao, X.; Yang, M. Transparent and Gas-Permeable Liquid Marbles for Culturing and Drug Sensitivity Test of Tumor Spheroids. Adv. Healthc. Mater. 2017, 6, 1700185. [Google Scholar] [CrossRef]
- Liu, J.; Lyu, X.; Zhou, Z.; Yang, L.; Zeng, J.; Yang, Y.; Zhao, Z.; Chen, R.; Tong, X.; Li, J.; et al. Multifunctional Droplets Formed by Interfacially Self-Assembled Fluorinated Magnetic Nanoparticles for Biocompatible Single Cell Culture and Magnet-Driven Manipulation. ACS Appl. Mater. Interfaces 2023, 15, 17324–17334. [Google Scholar] [CrossRef]
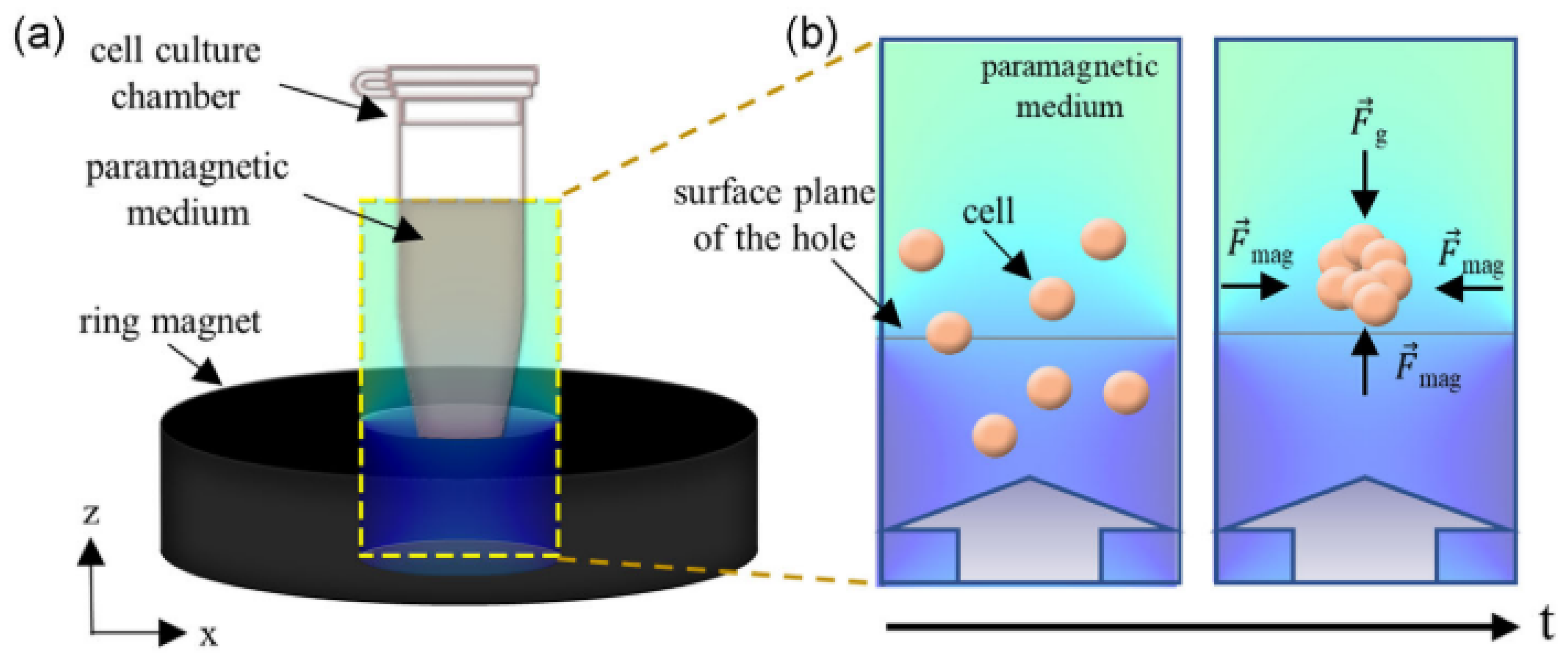
- Anil-Inevi, M.; Delikoyun, K.; Mese, G.; Tekin, H.C.; Ozcivici, E. Magnetic levitation assisted biofabrication, culture, and manipulation of 3D cellular structures using a ring magnet based setup. Biotechnol. Bioeng. 2021, 118, 4771–4785. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Su, K.; Liu, H.; Zou, Y. Recent Advances in Magnetically Actuated Droplet Manipulation for Biomedical Applications. Magnetochemistry 2024, 10, 28. https://doi.org/10.3390/magnetochemistry10040028
Li J, Su K, Liu H, Zou Y. Recent Advances in Magnetically Actuated Droplet Manipulation for Biomedical Applications. Magnetochemistry. 2024; 10(4):28. https://doi.org/10.3390/magnetochemistry10040028
Chicago/Turabian StyleLi, Jiaqi, Kaixin Su, Hailan Liu, and Yuan Zou. 2024. "Recent Advances in Magnetically Actuated Droplet Manipulation for Biomedical Applications" Magnetochemistry 10, no. 4: 28. https://doi.org/10.3390/magnetochemistry10040028
APA StyleLi, J., Su, K., Liu, H., & Zou, Y. (2024). Recent Advances in Magnetically Actuated Droplet Manipulation for Biomedical Applications. Magnetochemistry, 10(4), 28. https://doi.org/10.3390/magnetochemistry10040028