A Review of Supervised Edge Detection Evaluation Methods and an Objective Comparison of Filtering Gradient Computations Using Hysteresis Thresholds


Abstract
:1. Introduction: Edge Detection and Hysteresis Thresholding
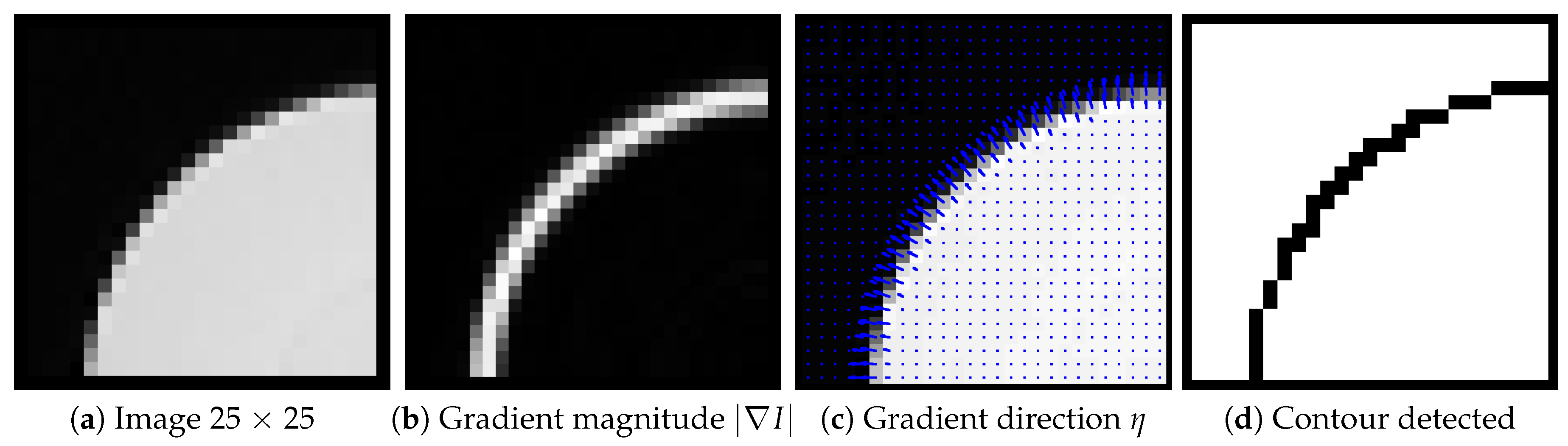
- Non-maximum suppression to obtain thin edges: the selected pixels are those having gradient magnitude at a local maximum along the gradient direction , which is perpendicular to the edge orientation [4].
- Thresholding of the thin contours to obtain an edge map.
2. Supervised Measures for Image Contour Evaluations
2.1. Error Measures Involving Only Statistics
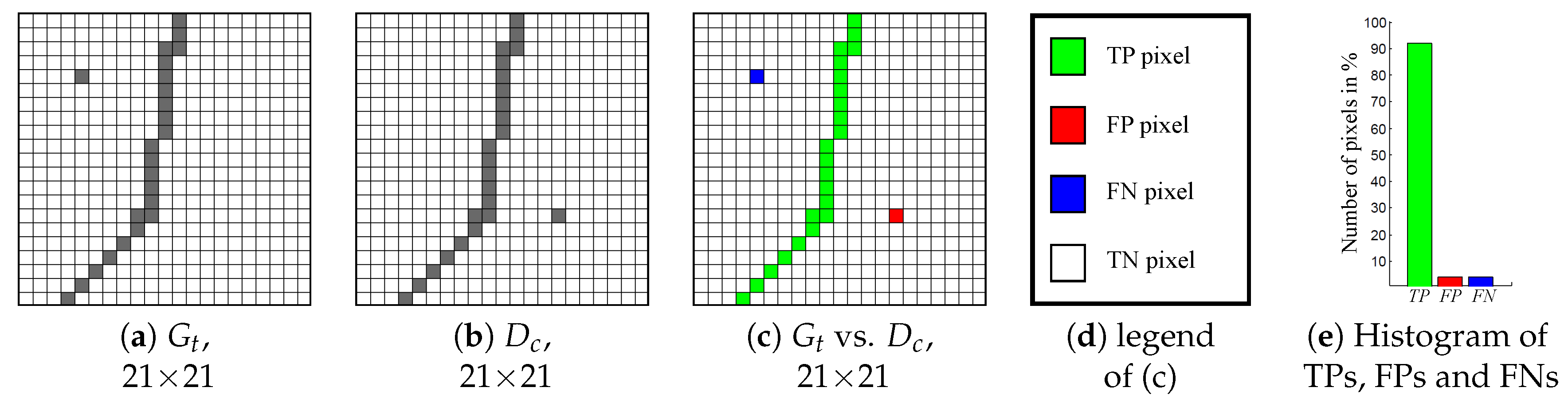
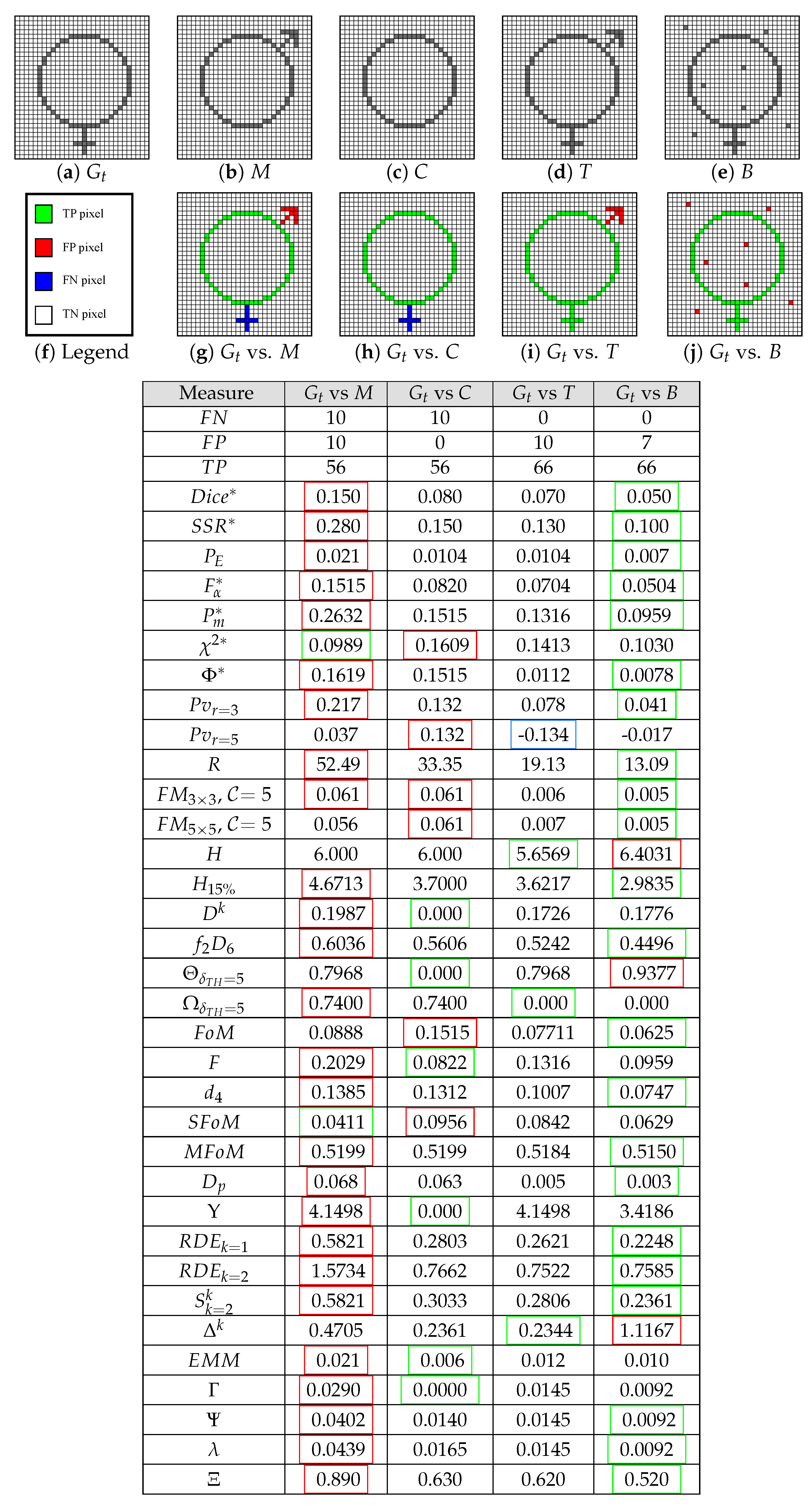
- True Positive points (TPs), common points of and : ,
- False Positive points (FPs), spurious detected edges of : ,
- False Negative points (FNs), missing boundary points of : ,
- True Negative points (TNs), common non-edge points: .
2.2. Assessments Involving Spacial Areas Around Edges
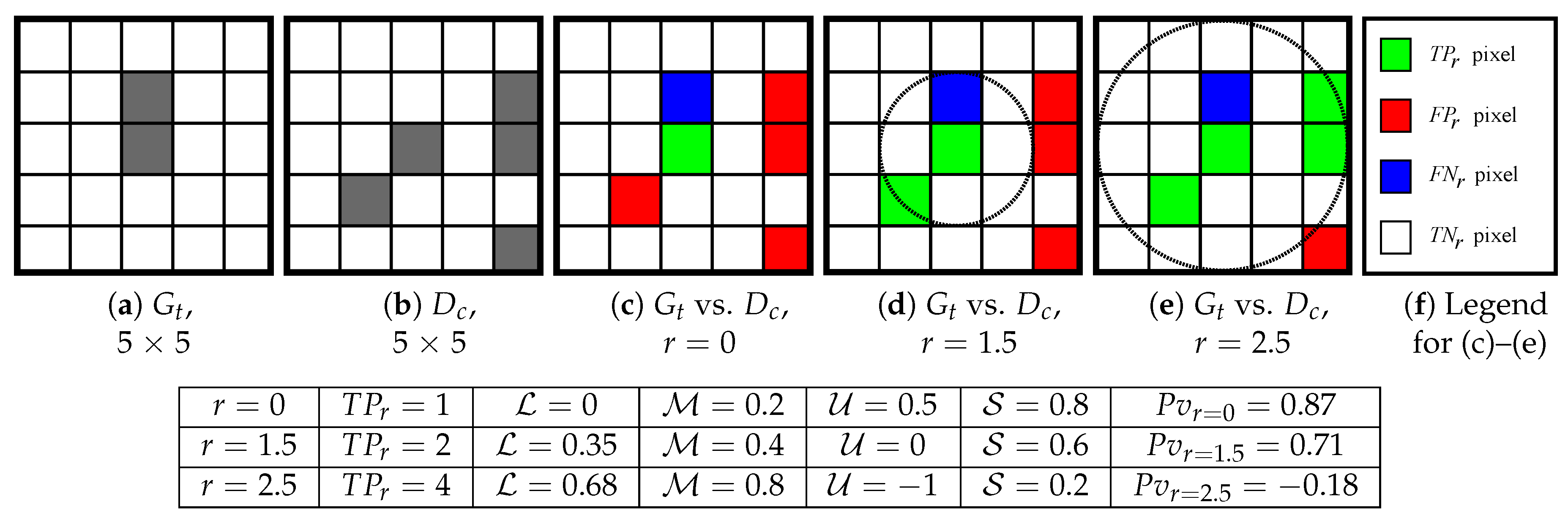
2.2.1. The Performance Value
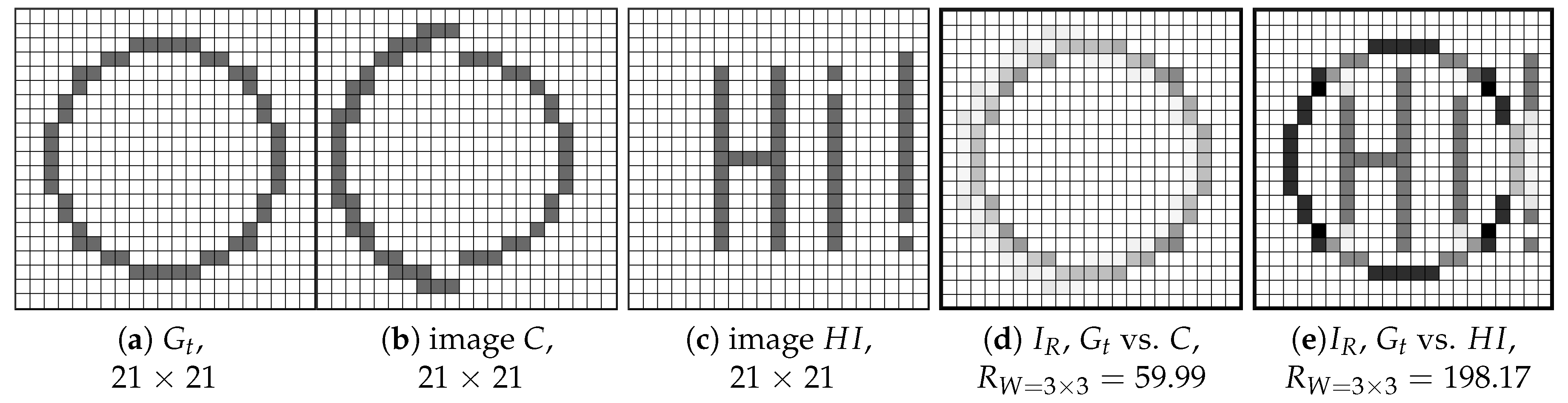
2.2.2. The Quality Measure R
- , the number of FPs in W, minus the central pixel: , with if the central pixel is a FP point, or 0 otherwise,
- , the number of FNs in W, minus the central pixel: , with if the central pixel is a FN point, or 0 otherwise.
- , the number of edge points belonging to in W: ,
- , the number of FPs in direct contact (i.e., 8-connexity) with the central pixel: for a pixel p, if , , with a window of size 3 × 3 centered on p,
- , the number of FNs in direct contact with the central pixel: for a pixel p, if , thus , with a window of size 3 × 3 centered on p.
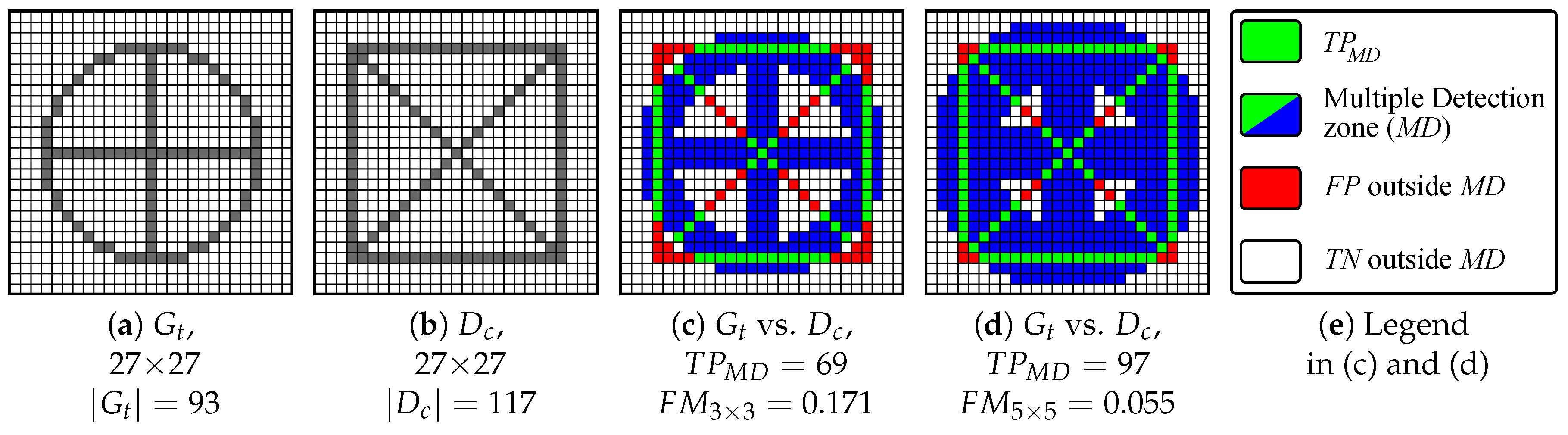
2.2.3. The Failure Measure
- , representing the number of TPs (see above),
- , where is a constant ( in our experiments) and represents the Euclidean distance between p and (see next section). In [20], represents the number of rows containing a point around the vertical edge.
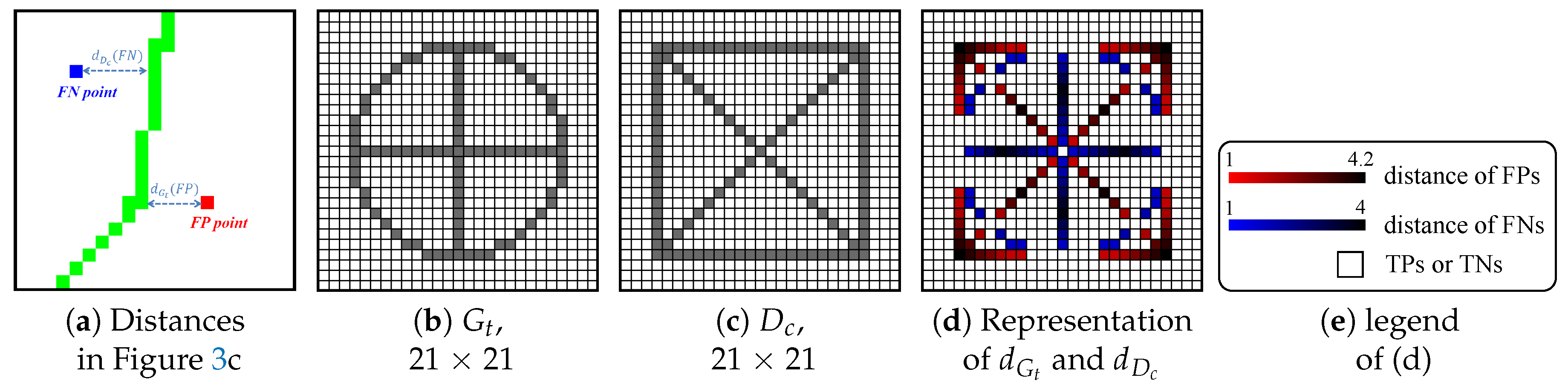
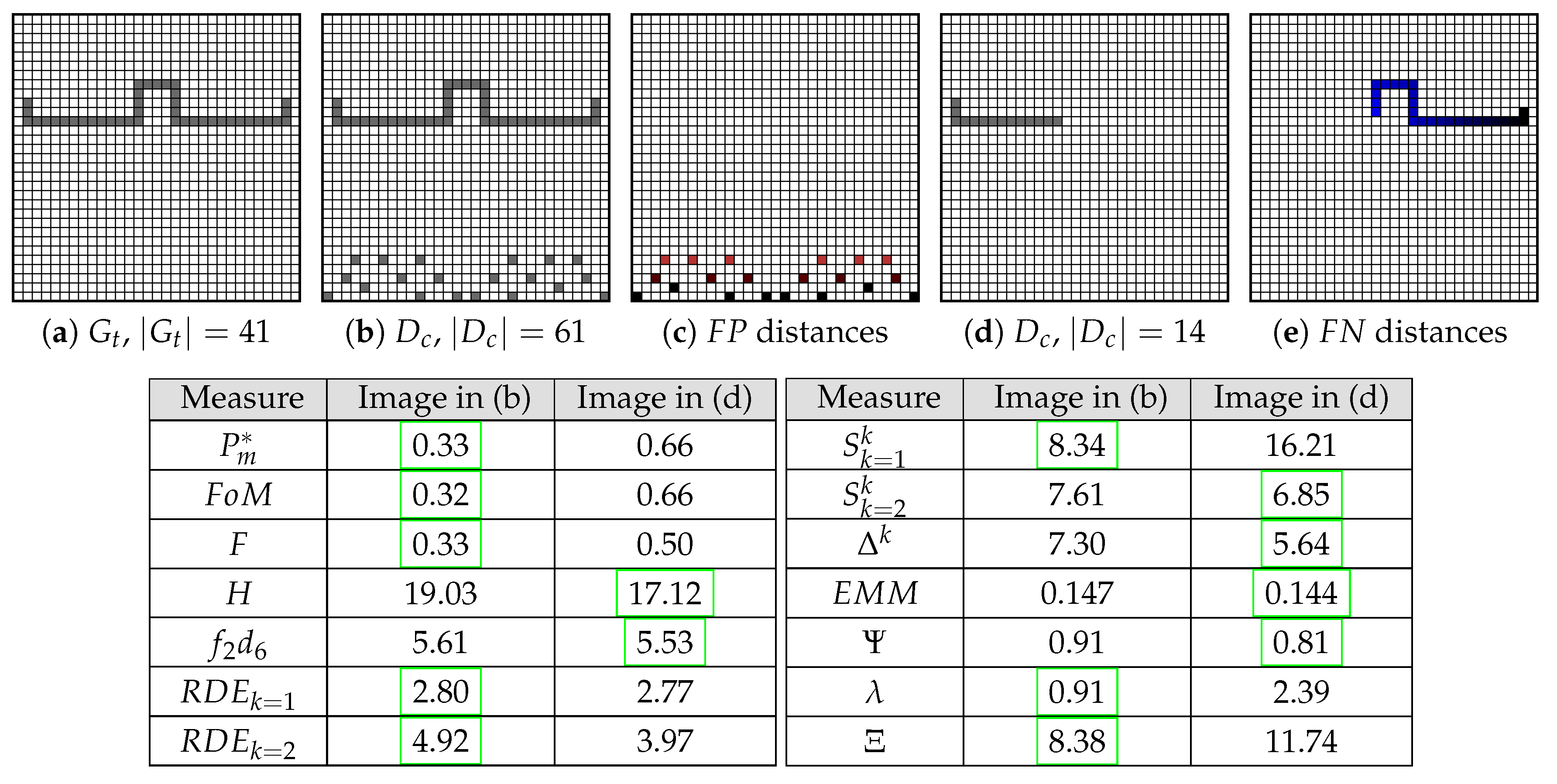
2.3. Assessment Involving Distances of Misplaced Pixels
- if : ,
- if : .
- if : ,
- if : .
- ,
- ,
- ,
- .
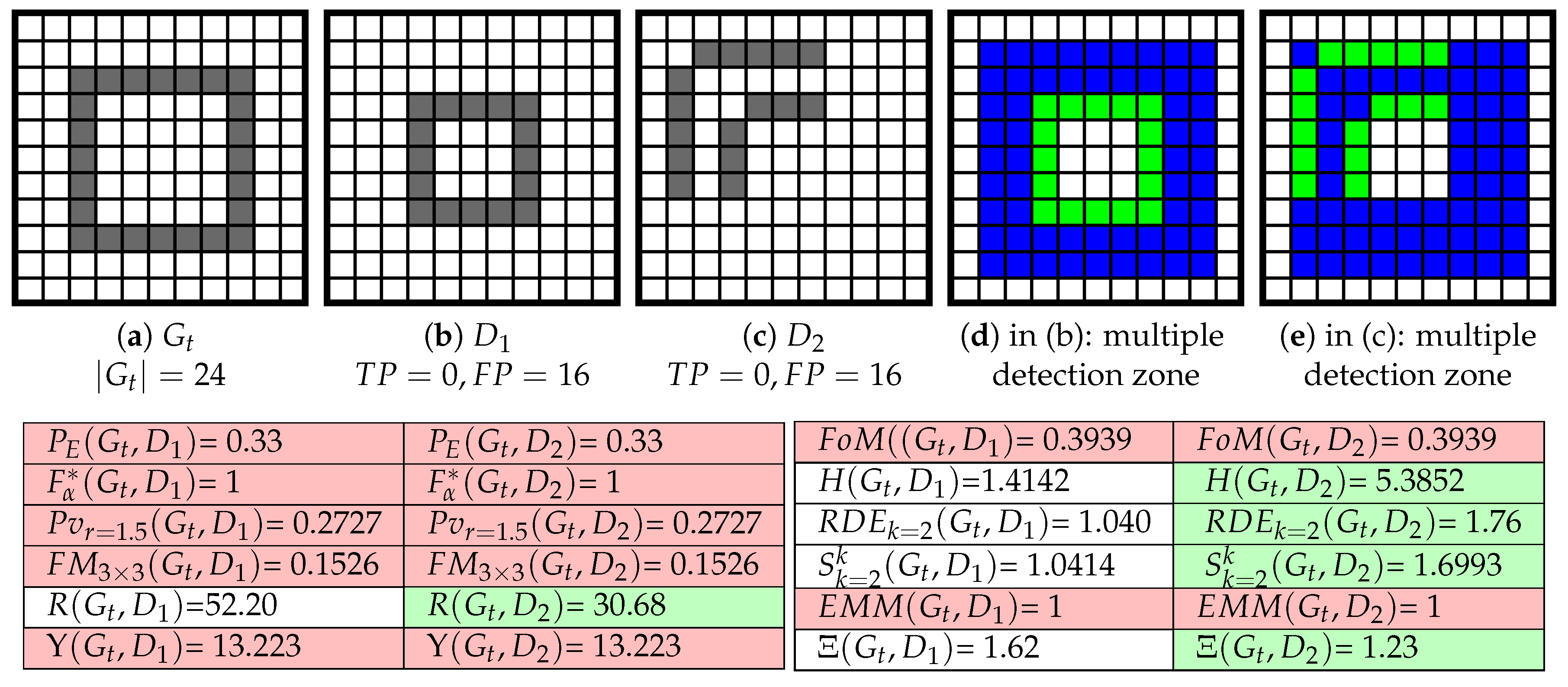
3. A New Objective Edge Detection Assessment Measure
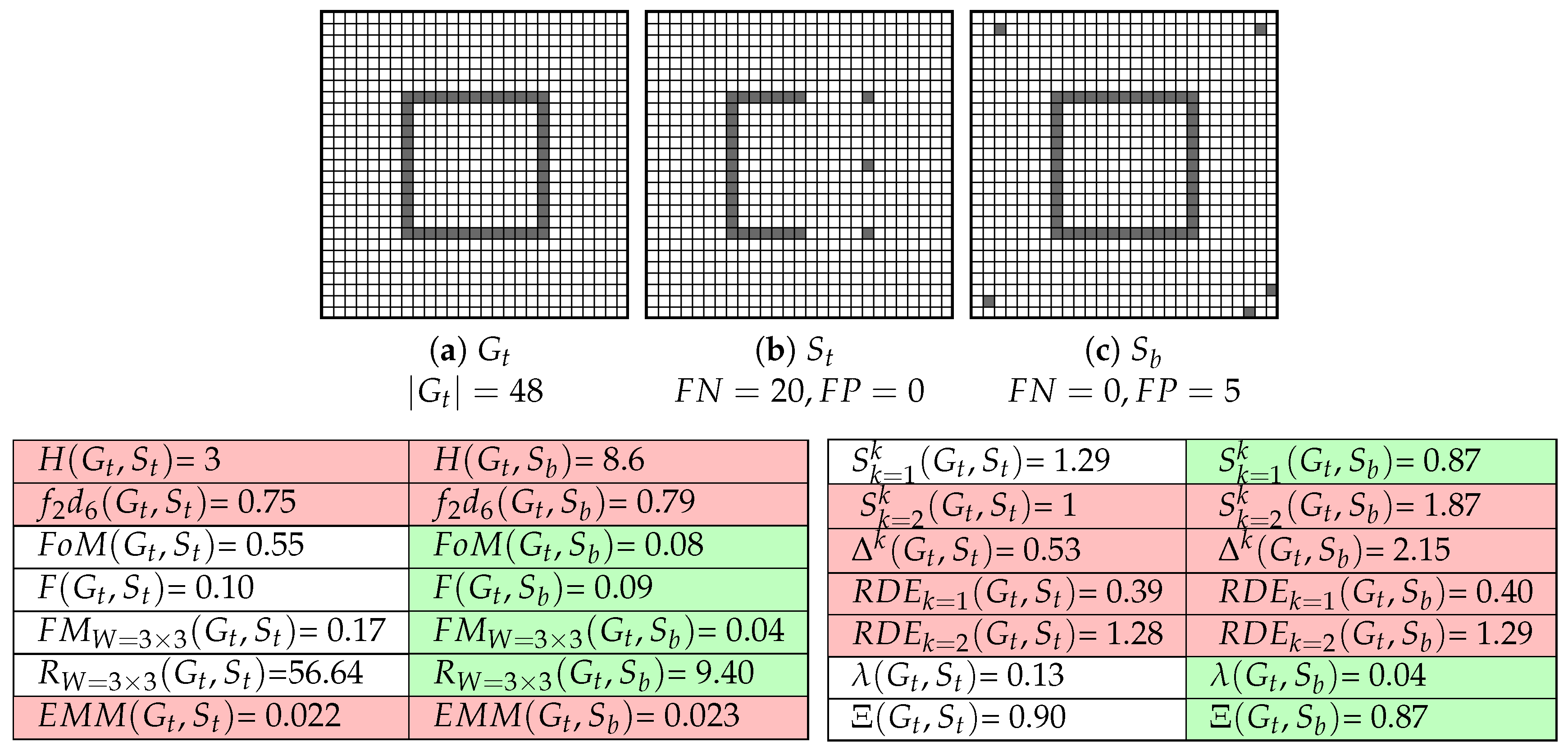
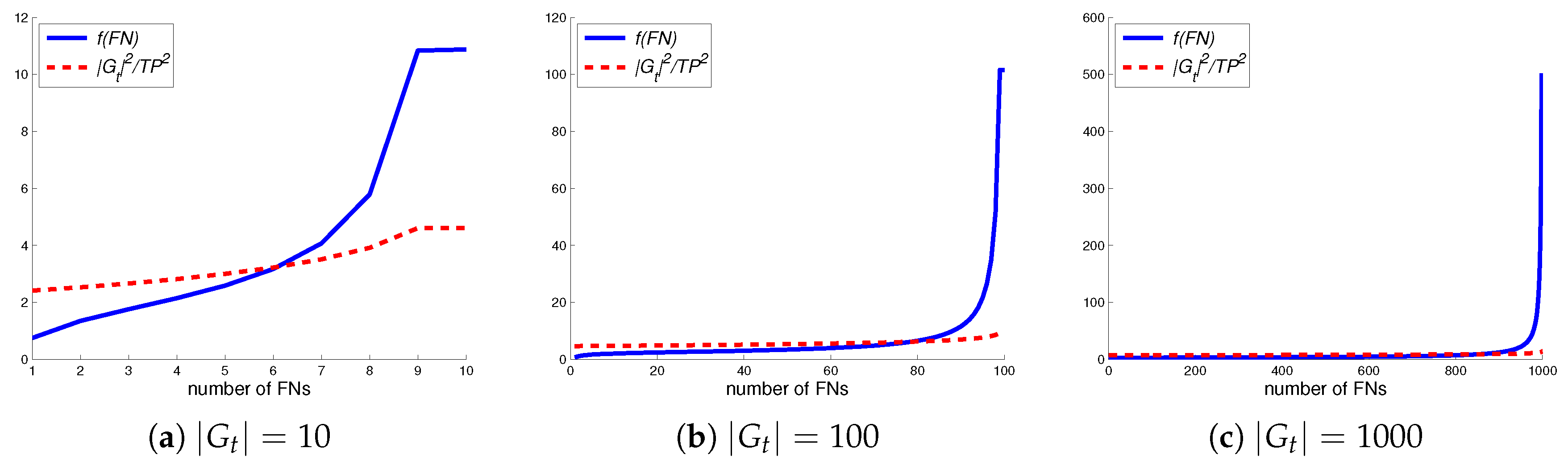
3.1. Influence of the Penalization of False Negative Points in Edge Detection Evaluation
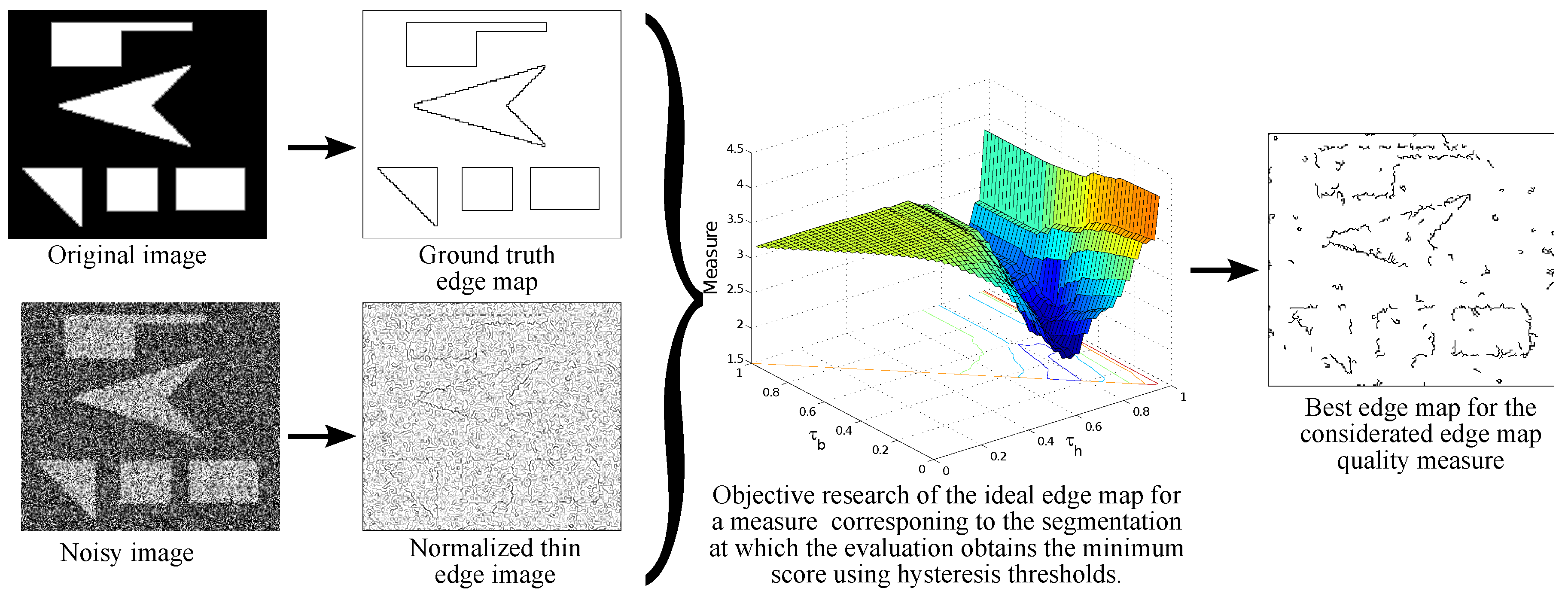
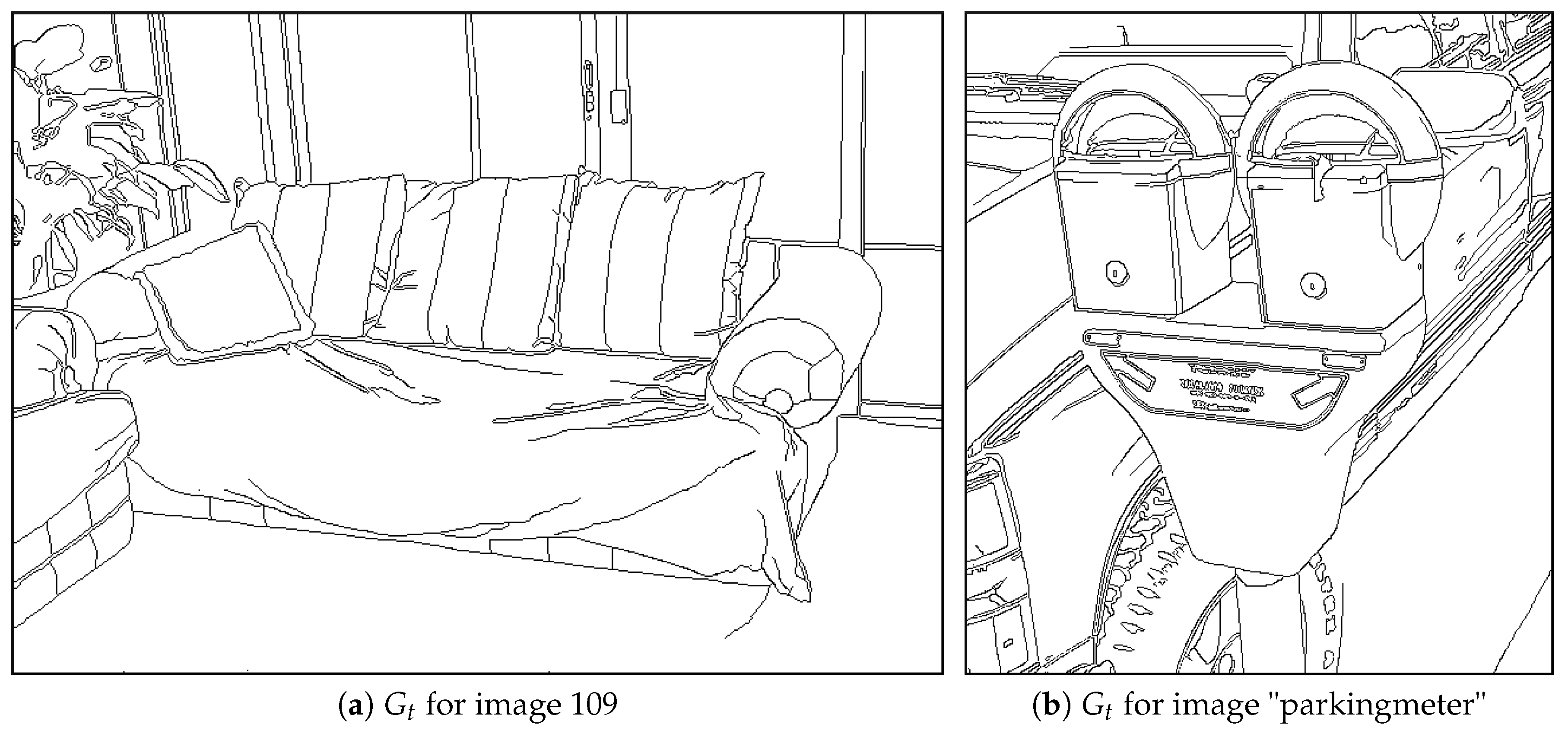
3.2. Minimum of the Measure and Ground Truth Edge Image
| Algorithm 1 Calculates the minimum score and the best edge map of a given measure |
| Require: : normalized thin gradient image Require: : Ground Truth edge image Require: : hysteresis threshold function Require: : Measure computing a dissimilarity score between and a desired contour % step for the loops on thresholds % the largest finite floating-point number for do for do if then if then % ideal score % ideal edge map end if end if end for end for |
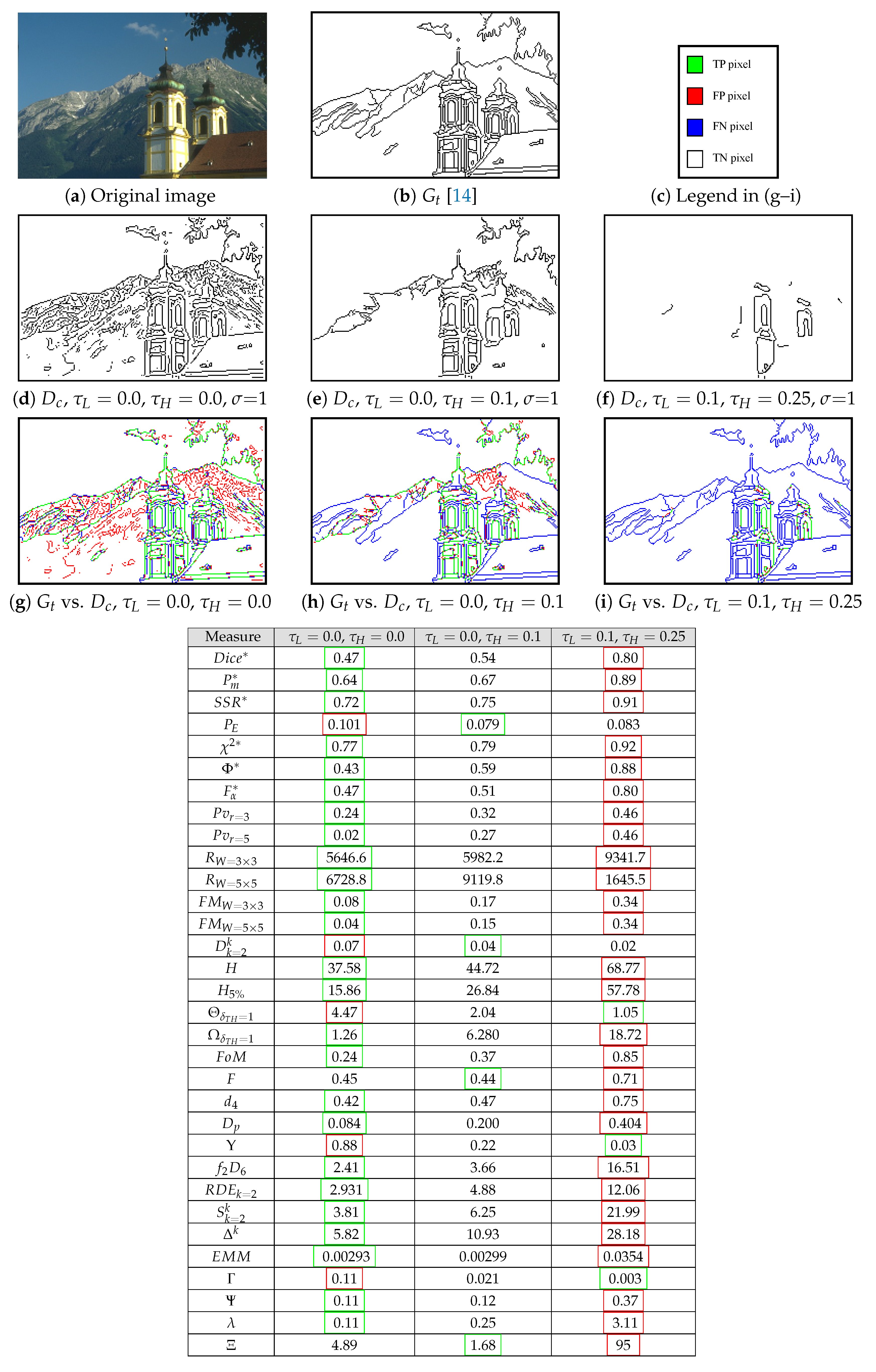
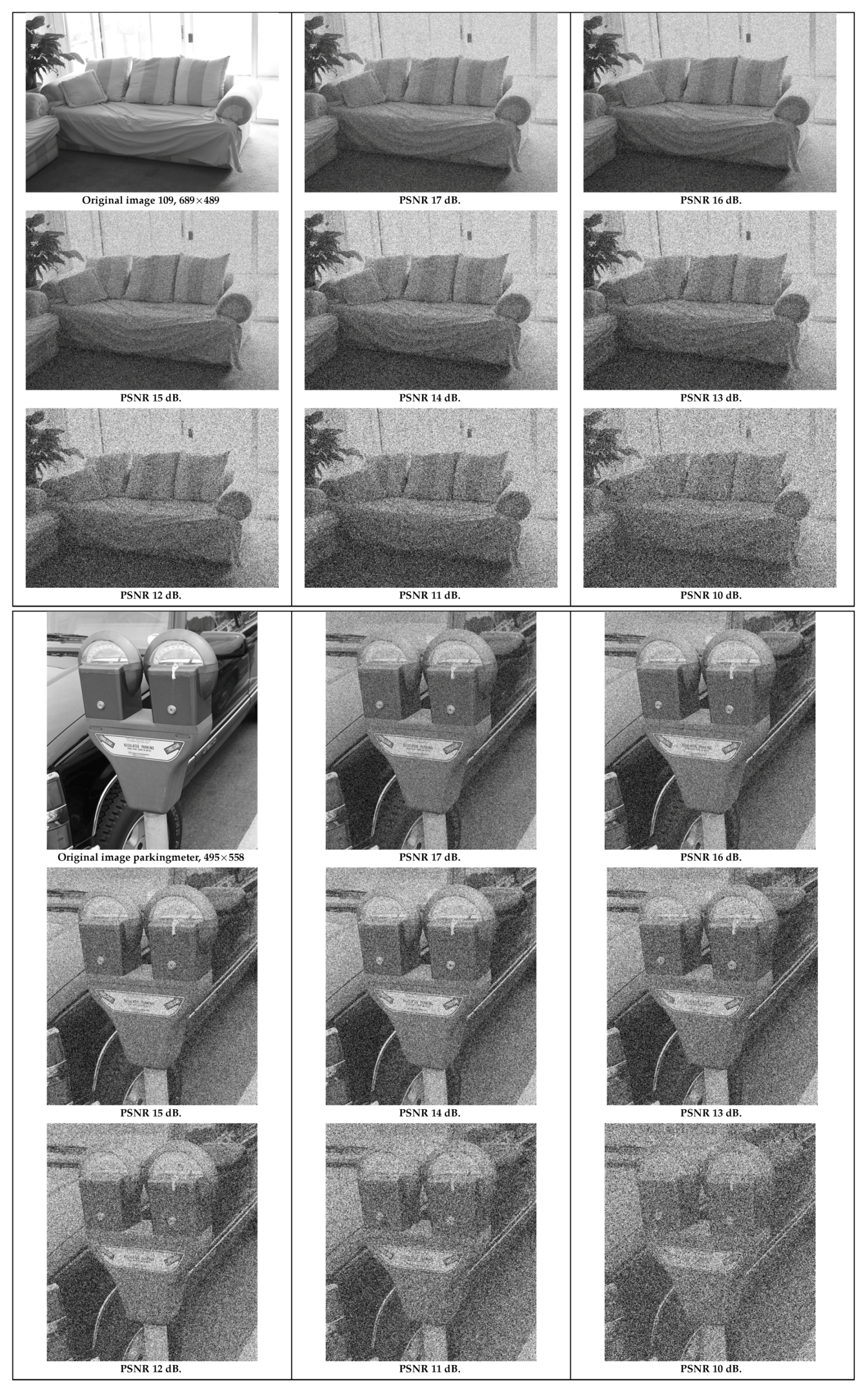
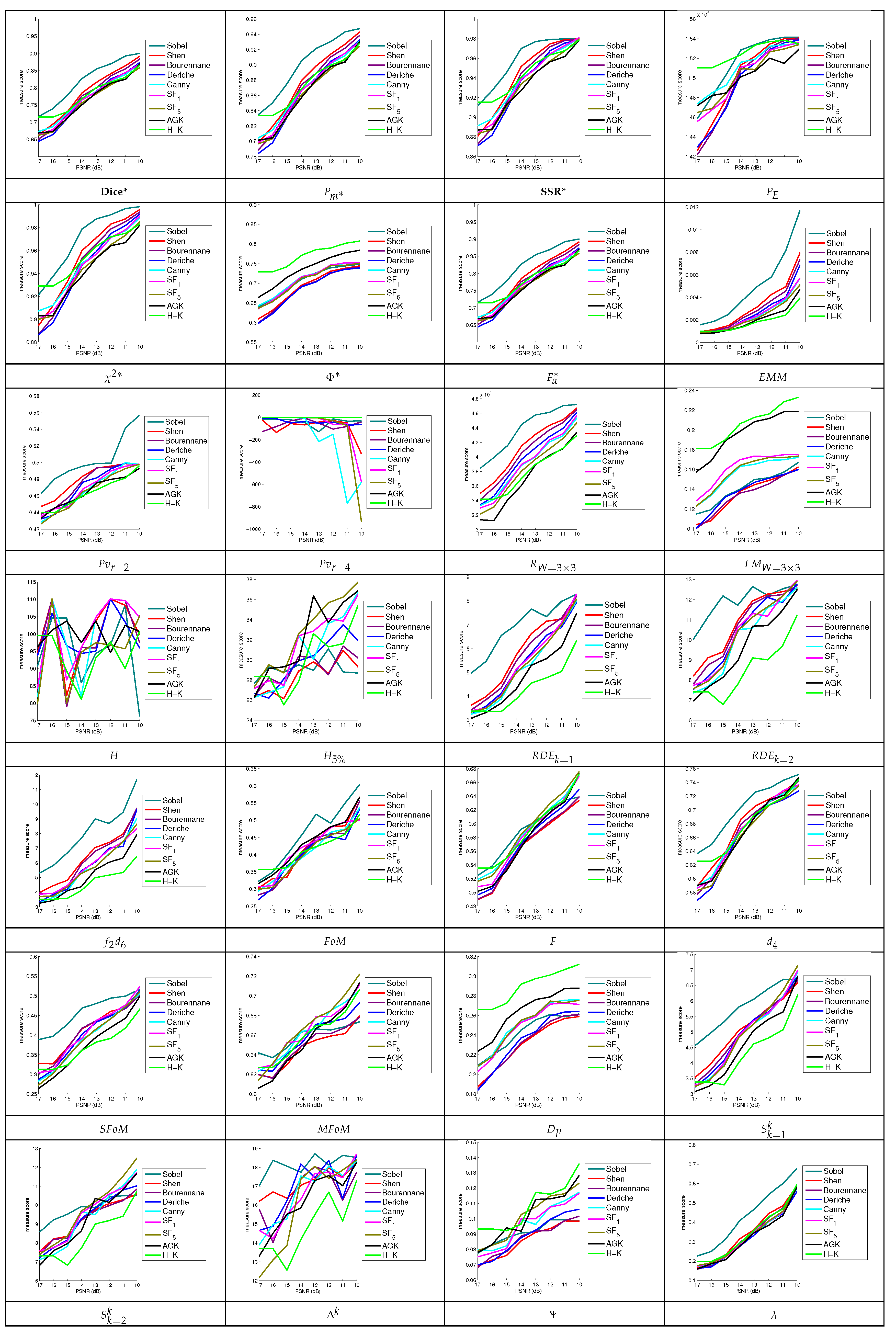
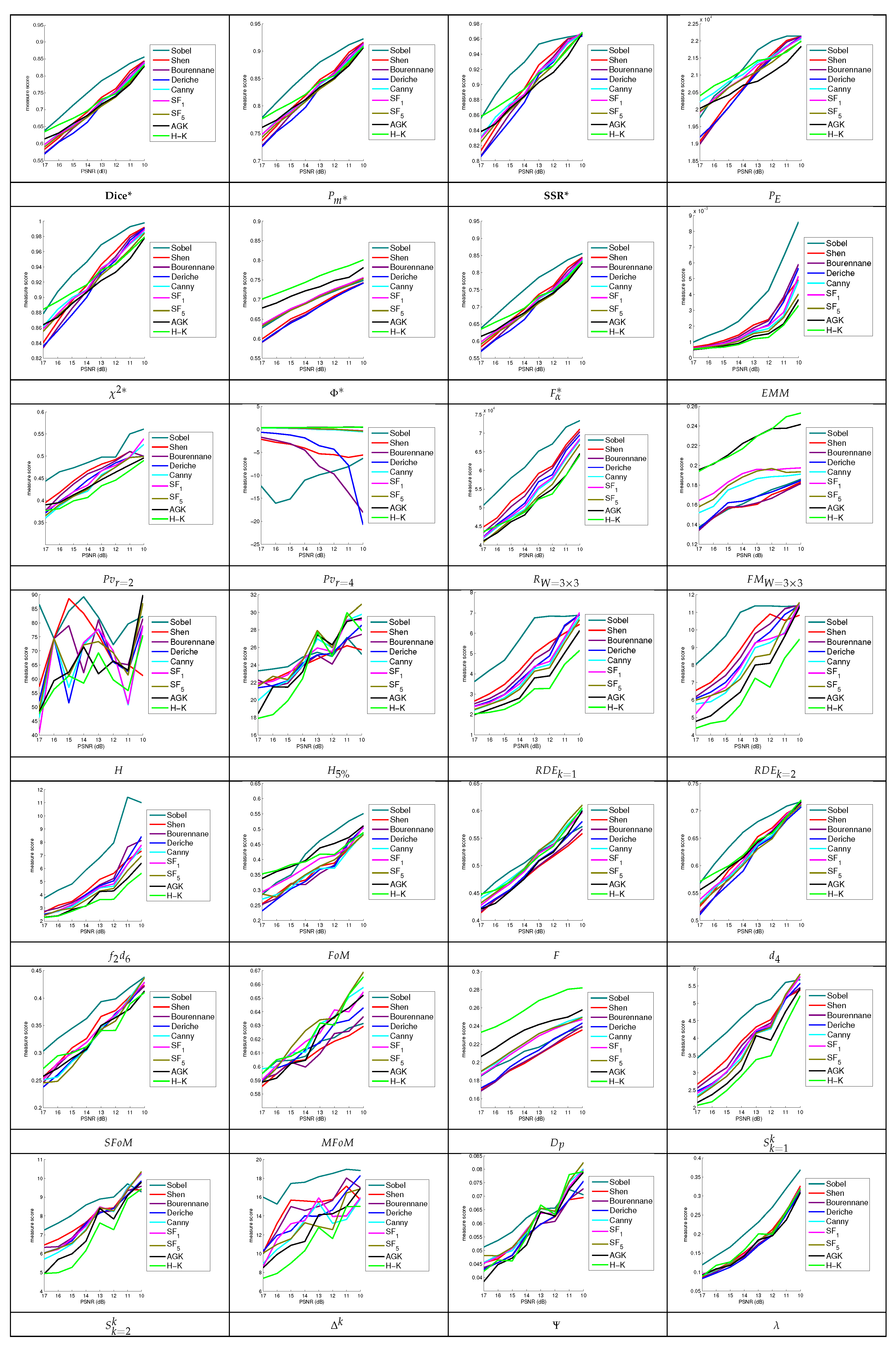
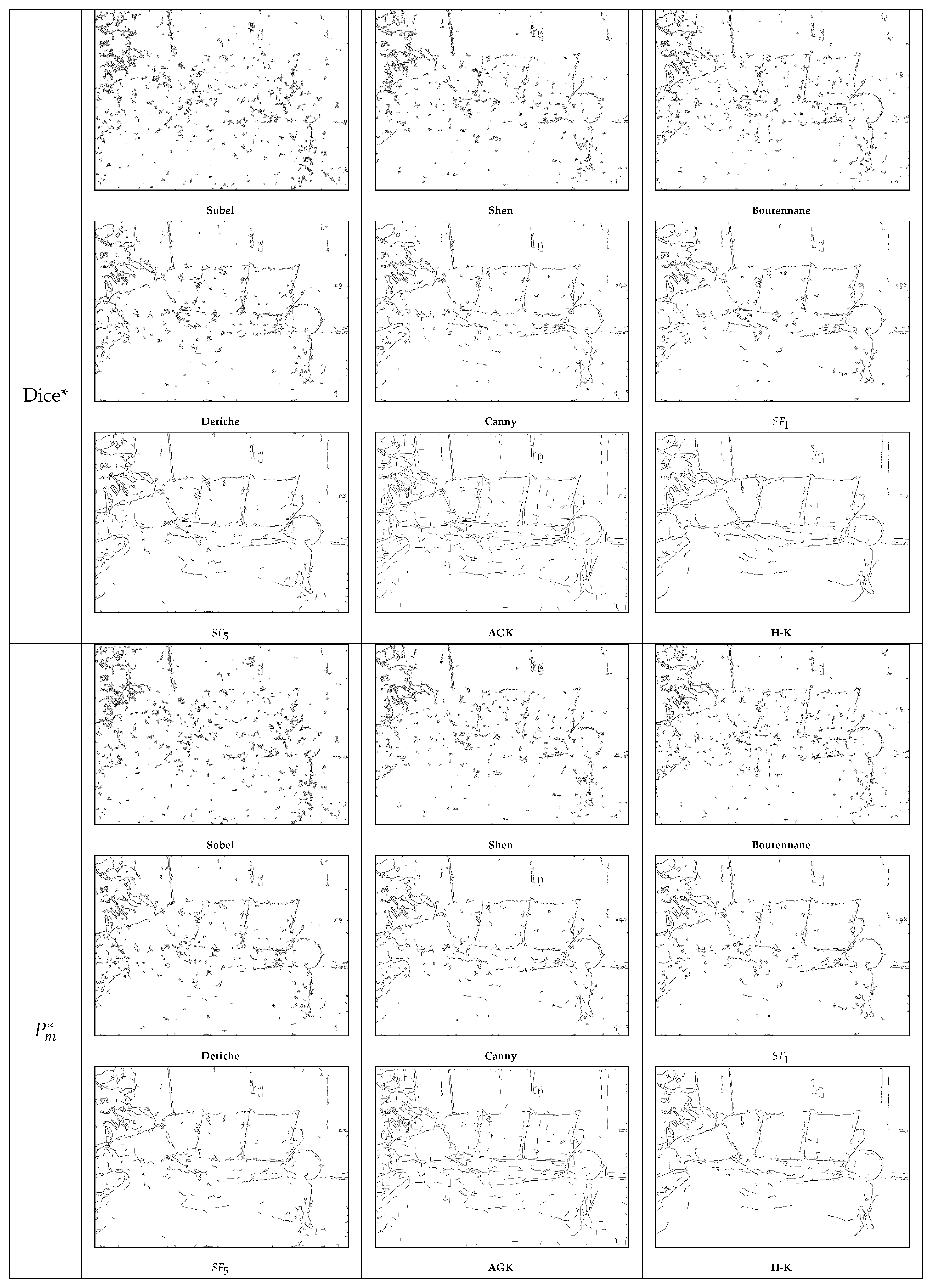
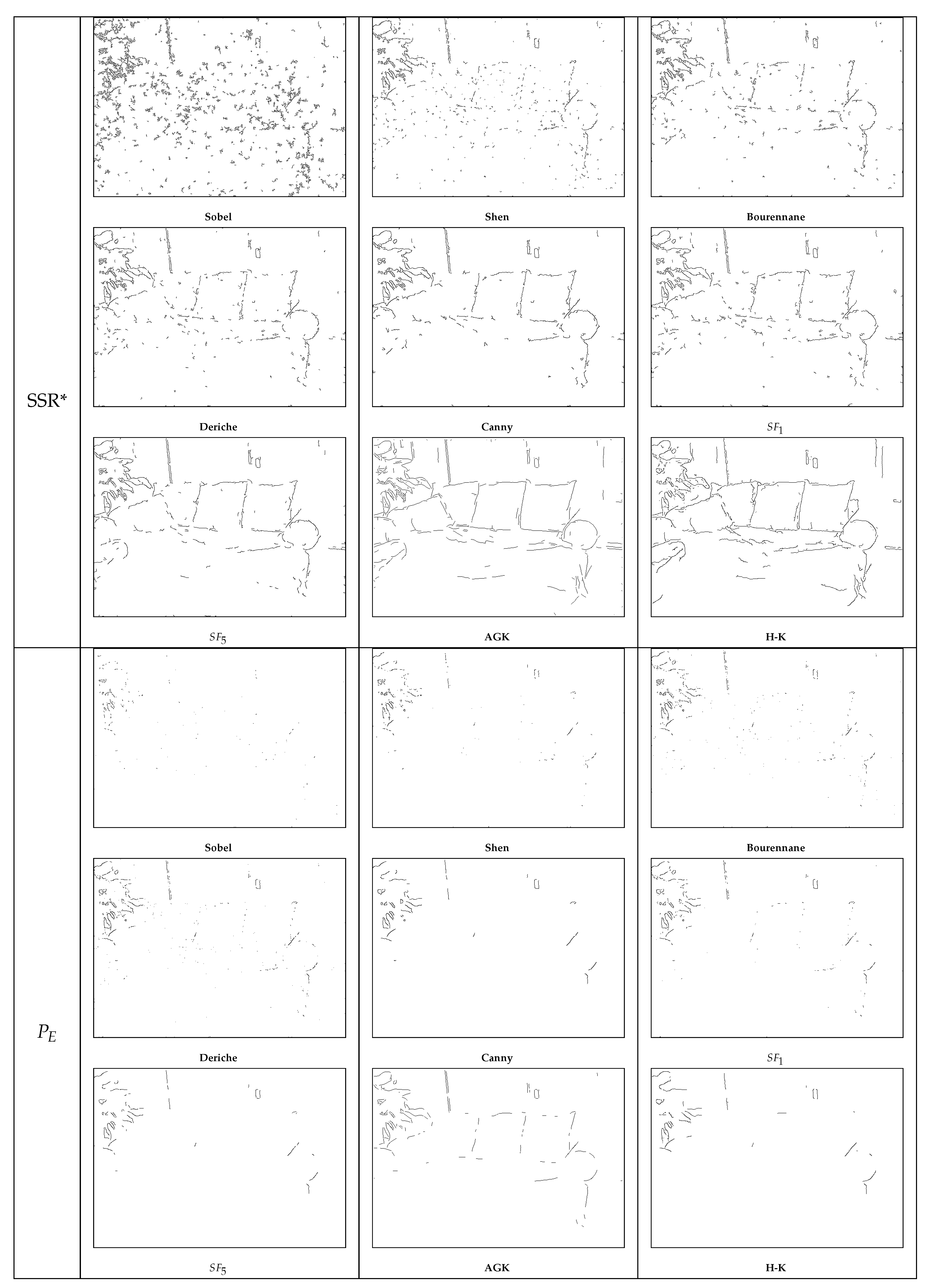
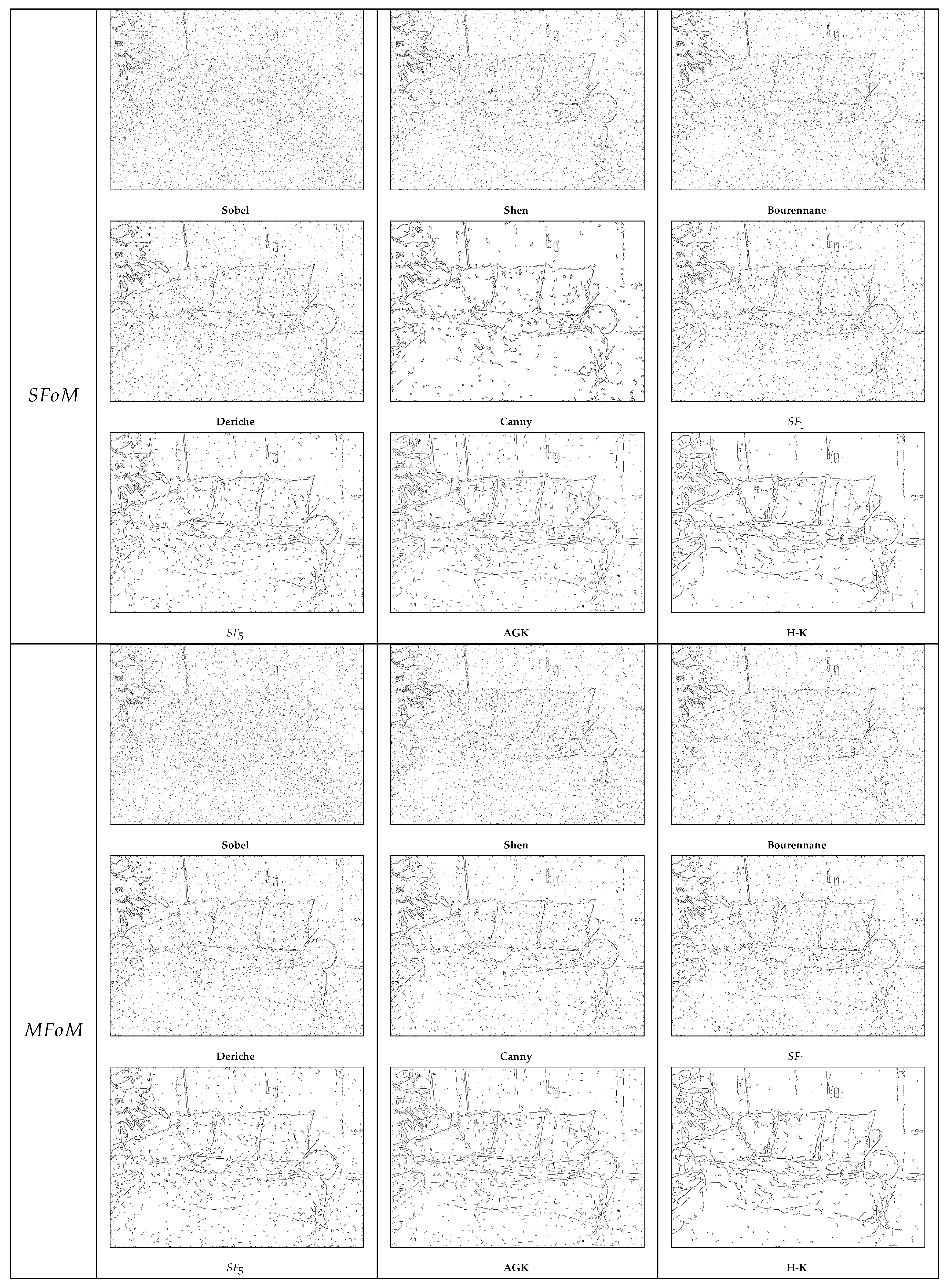
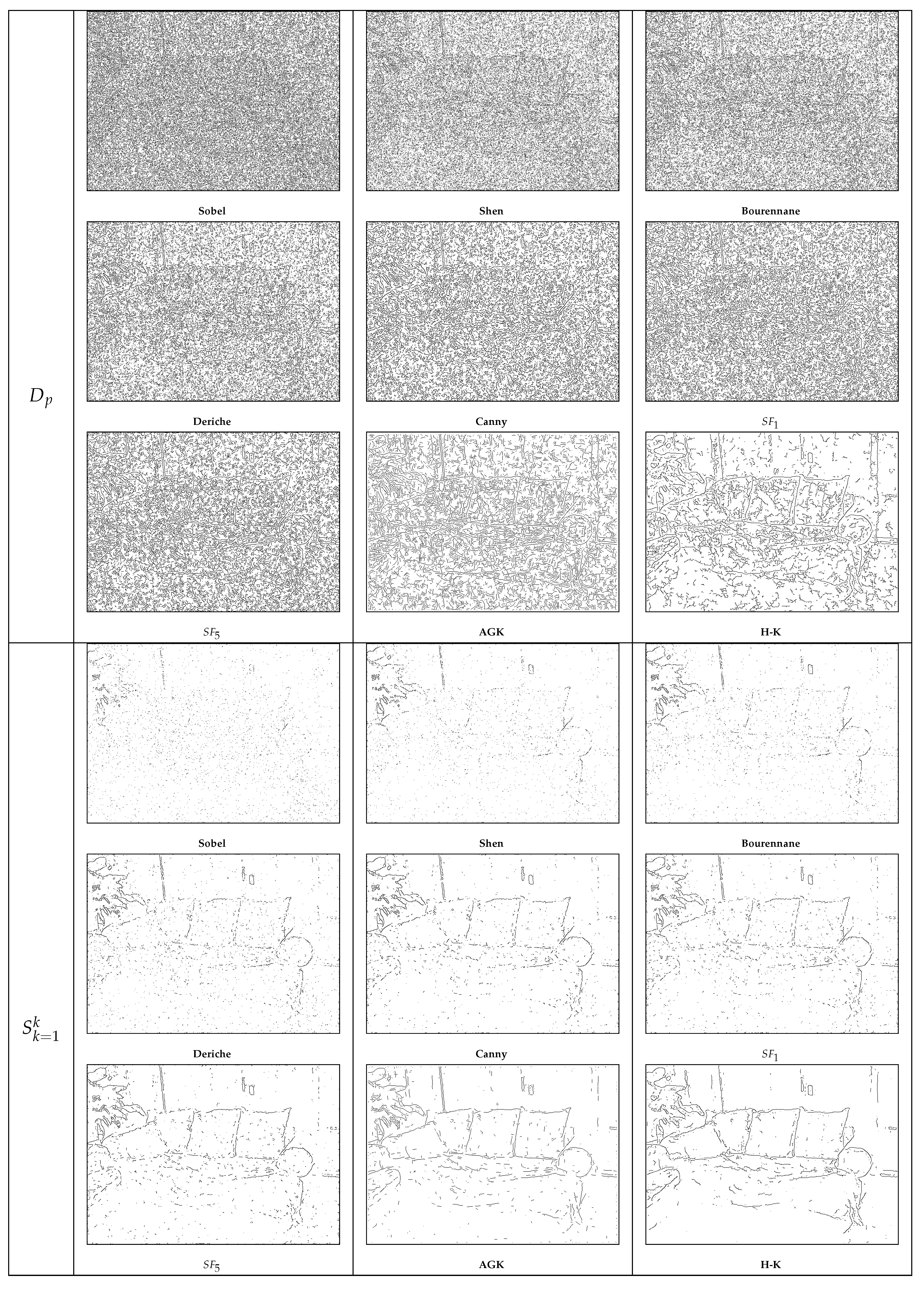
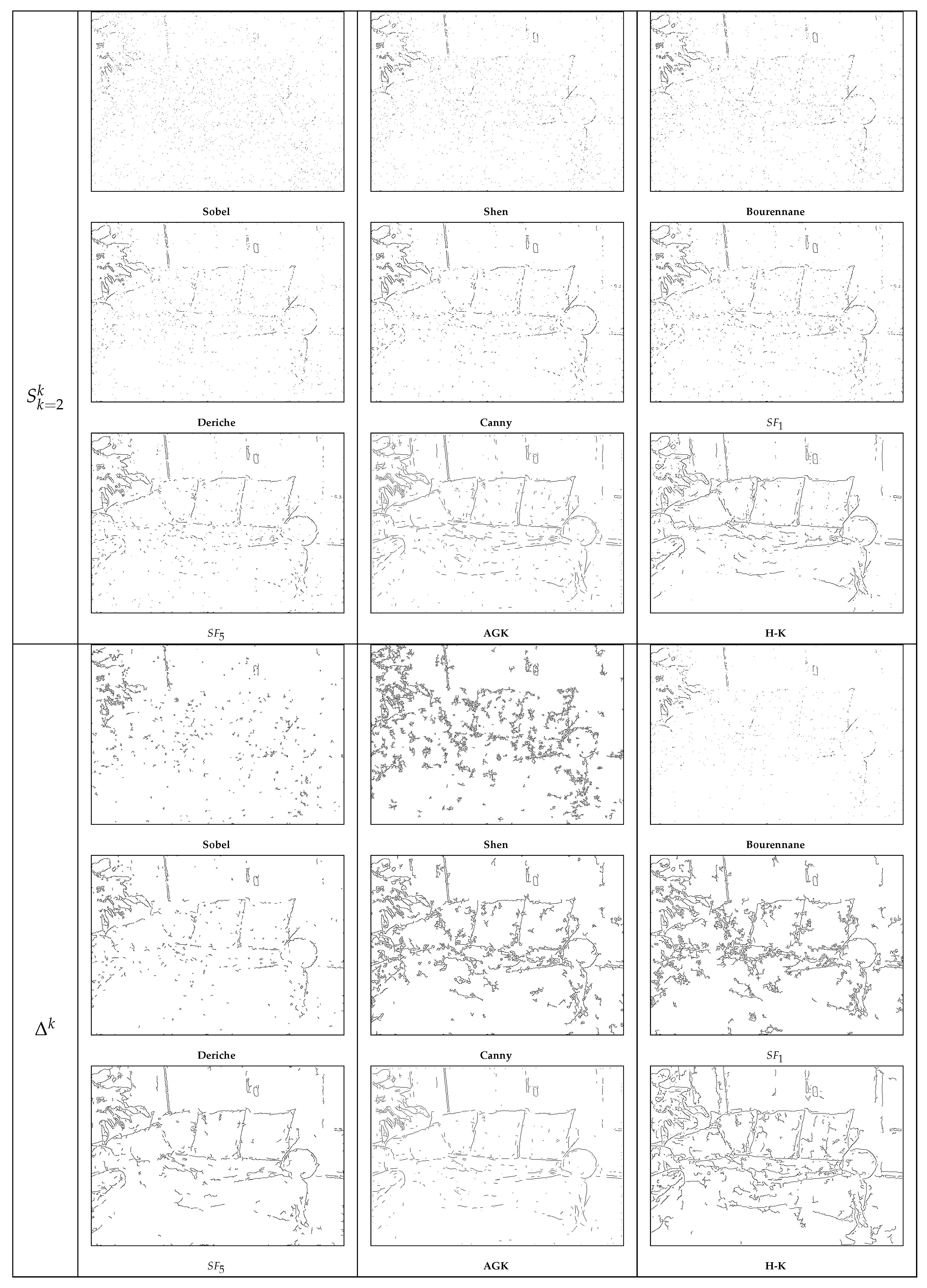
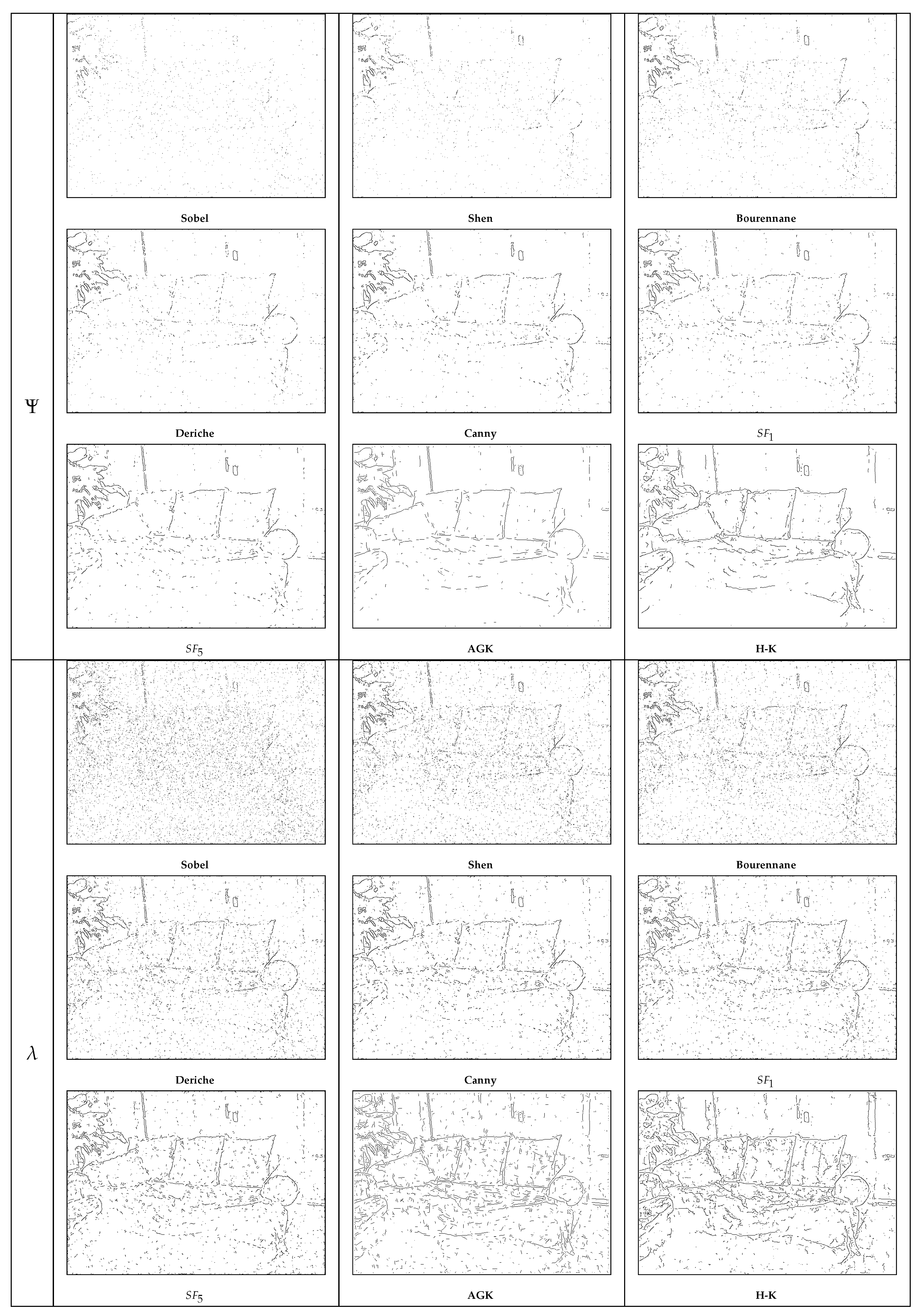
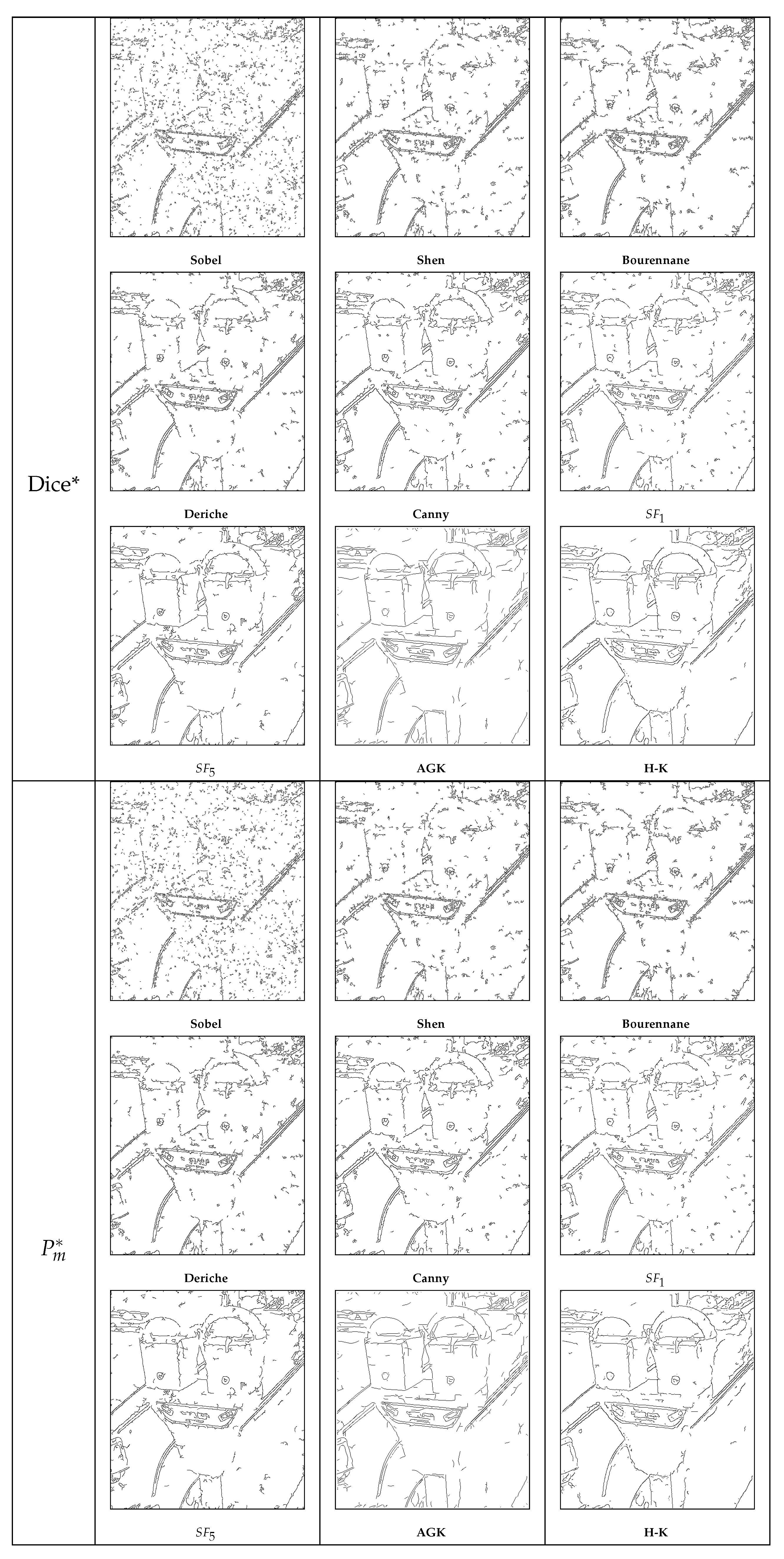
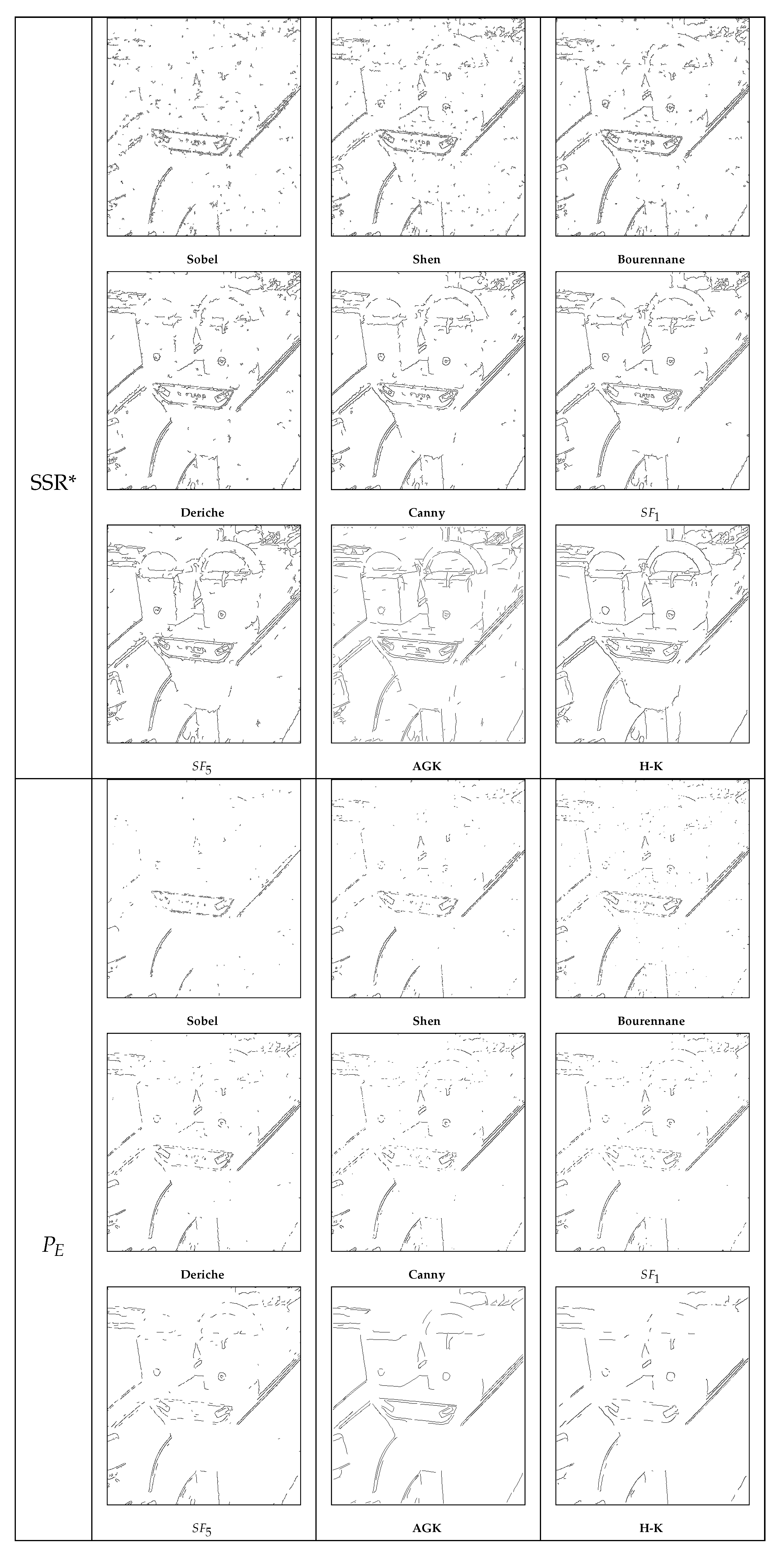
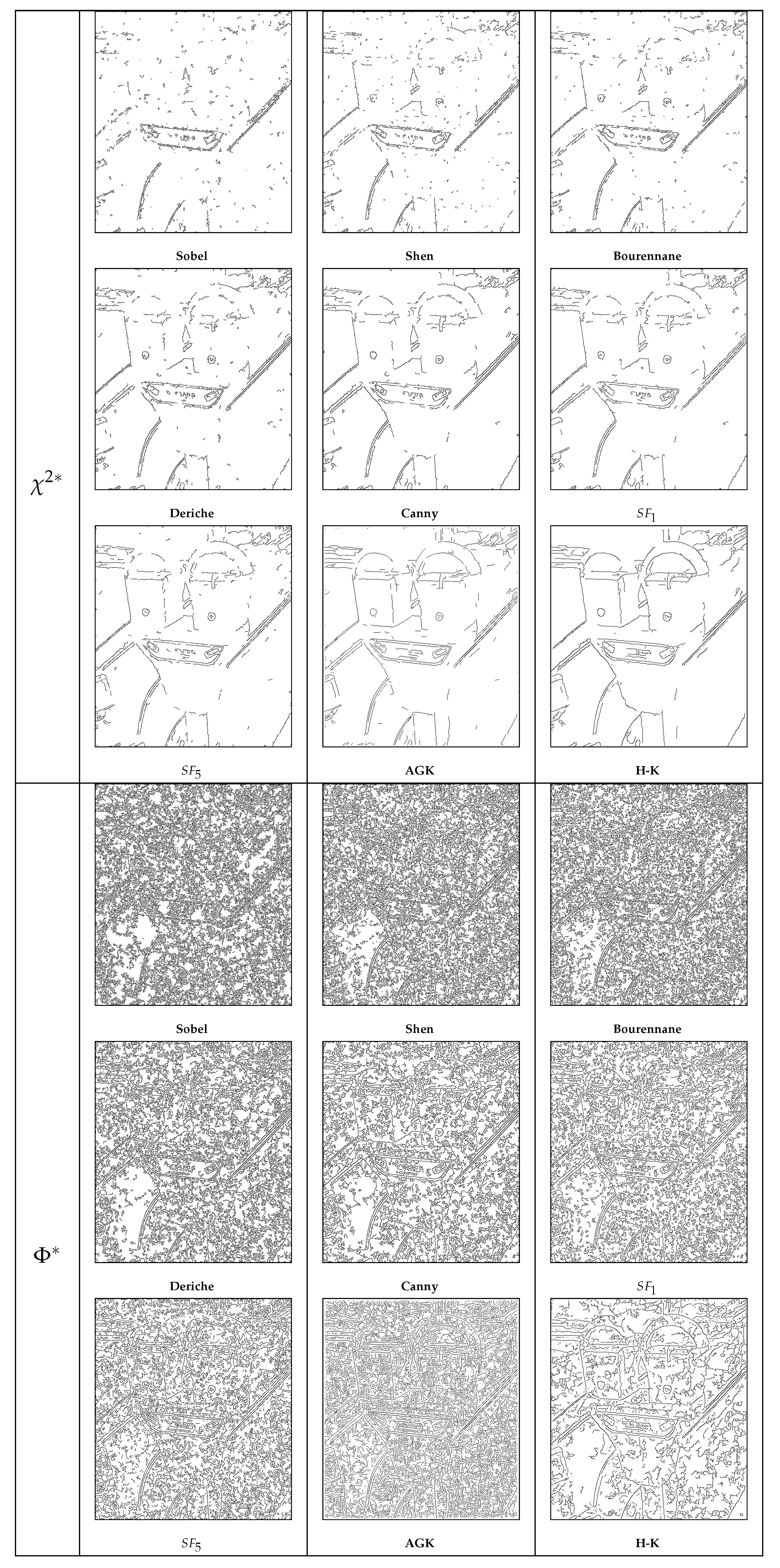
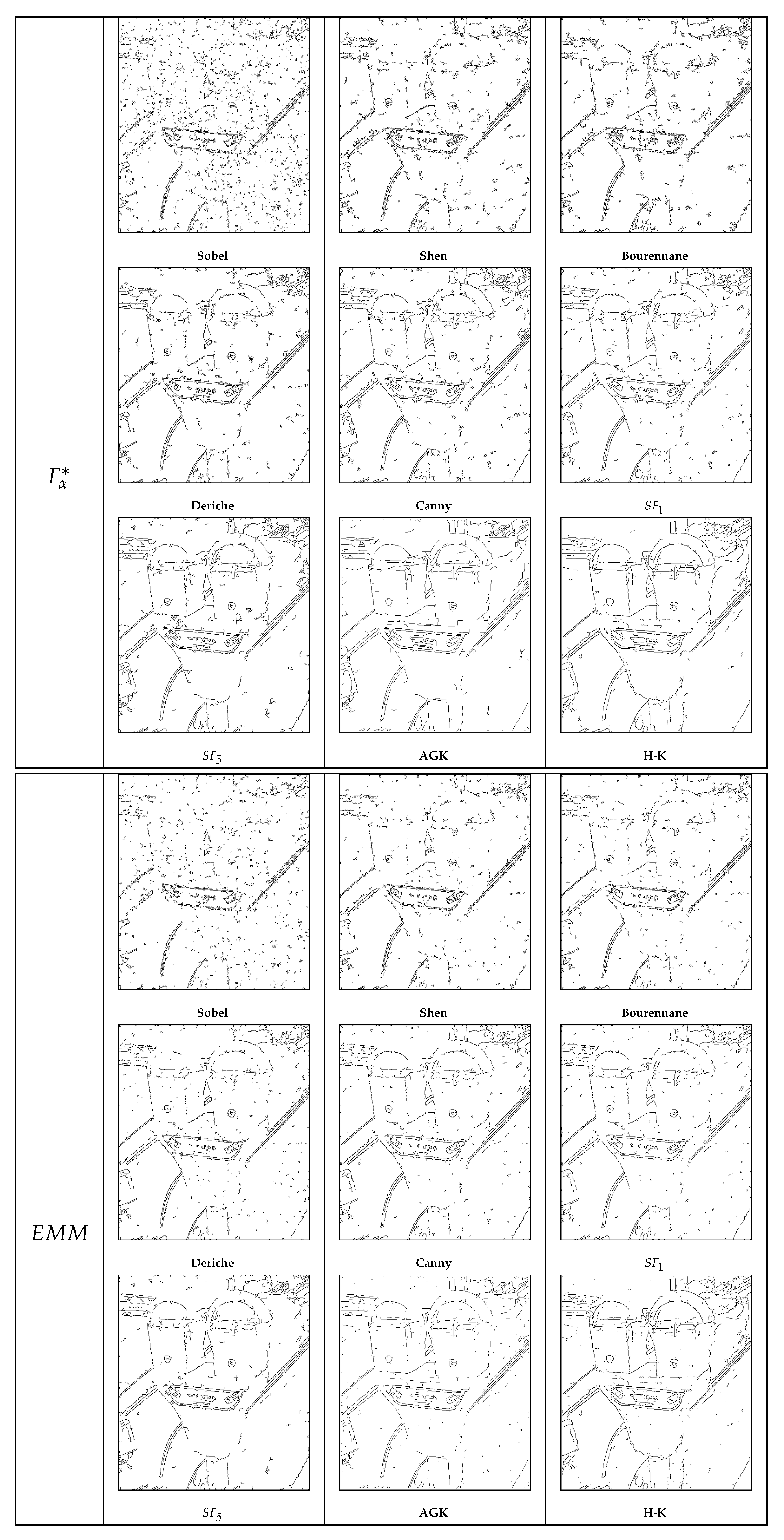
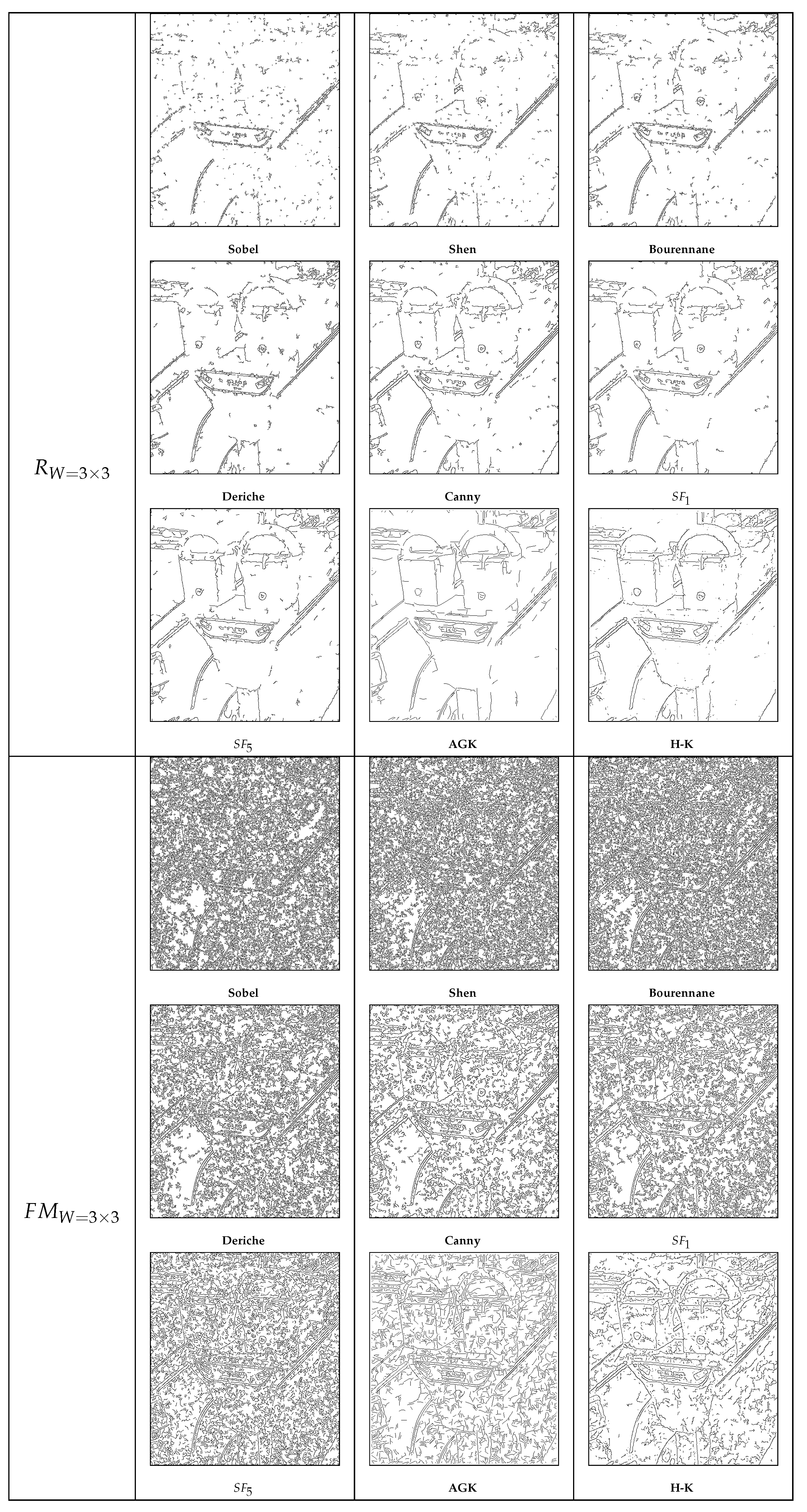
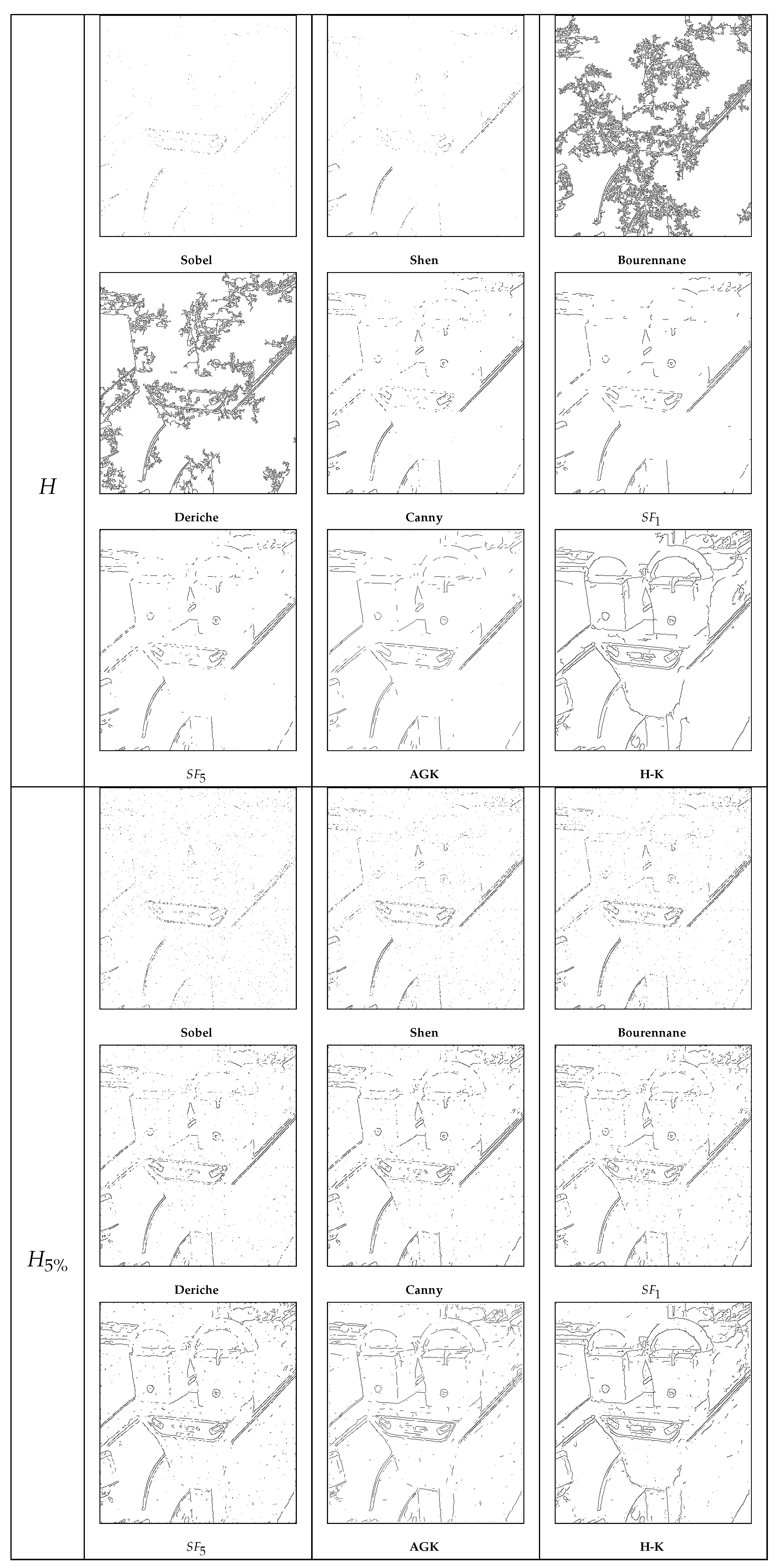
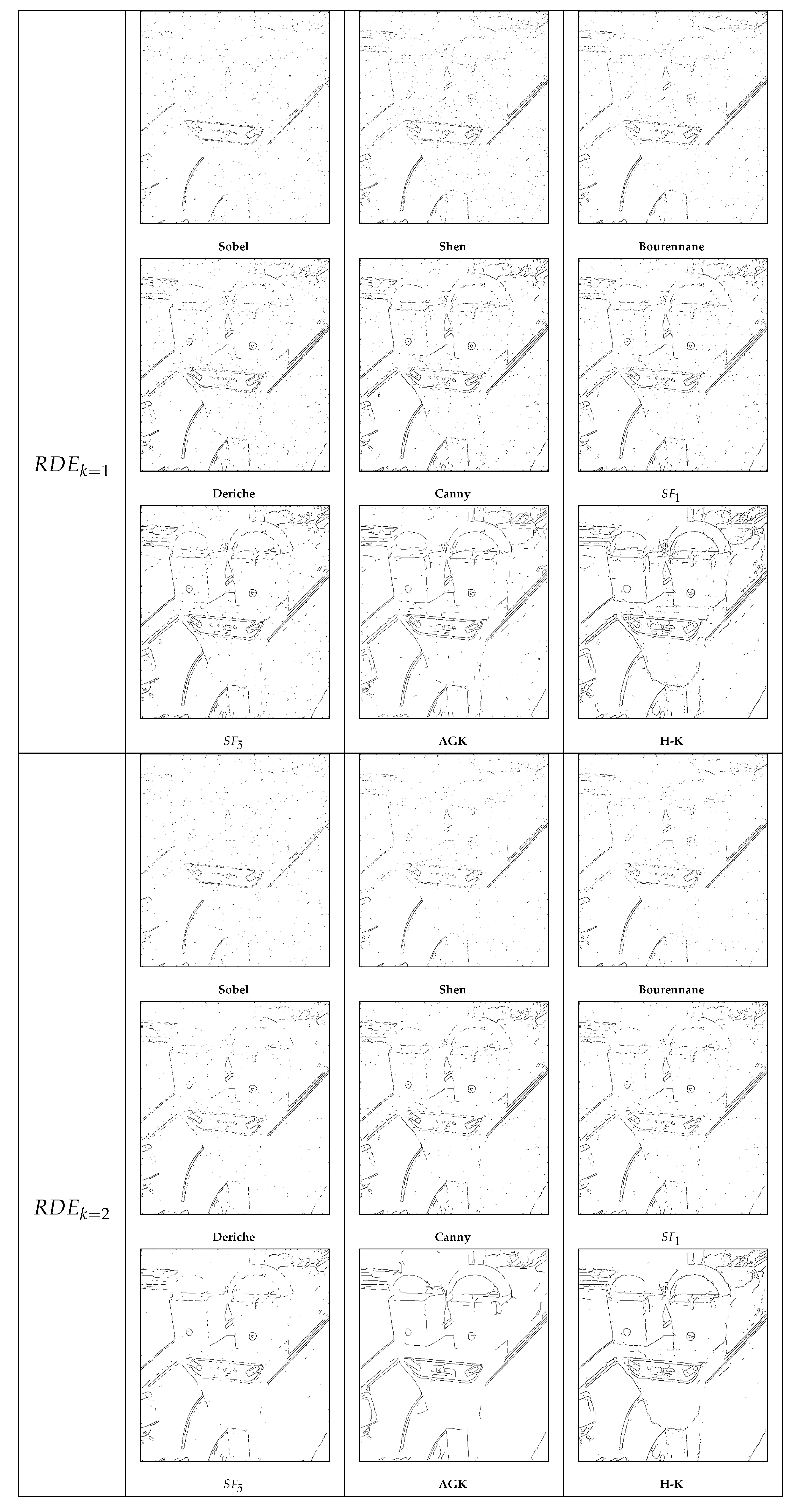
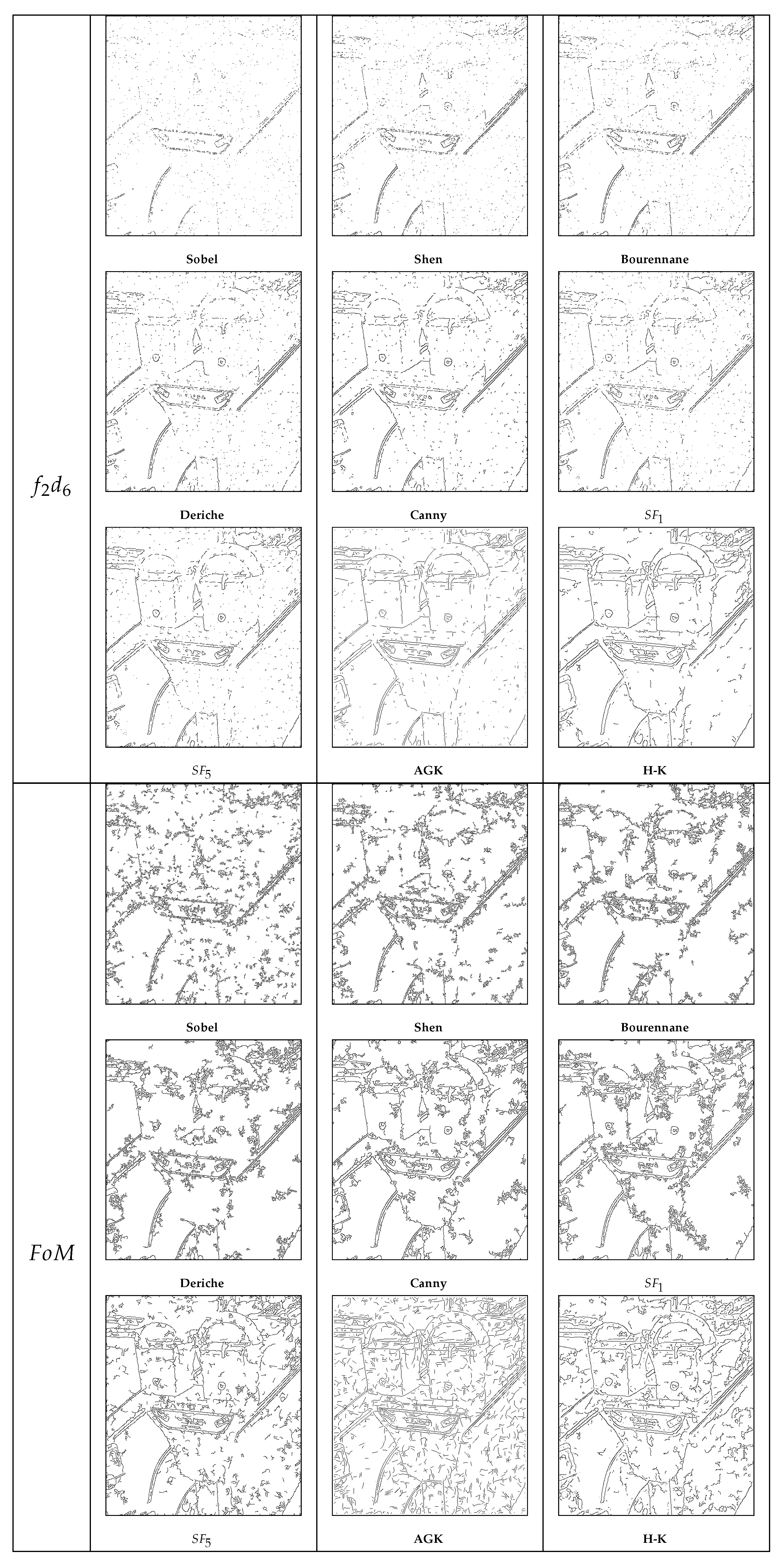
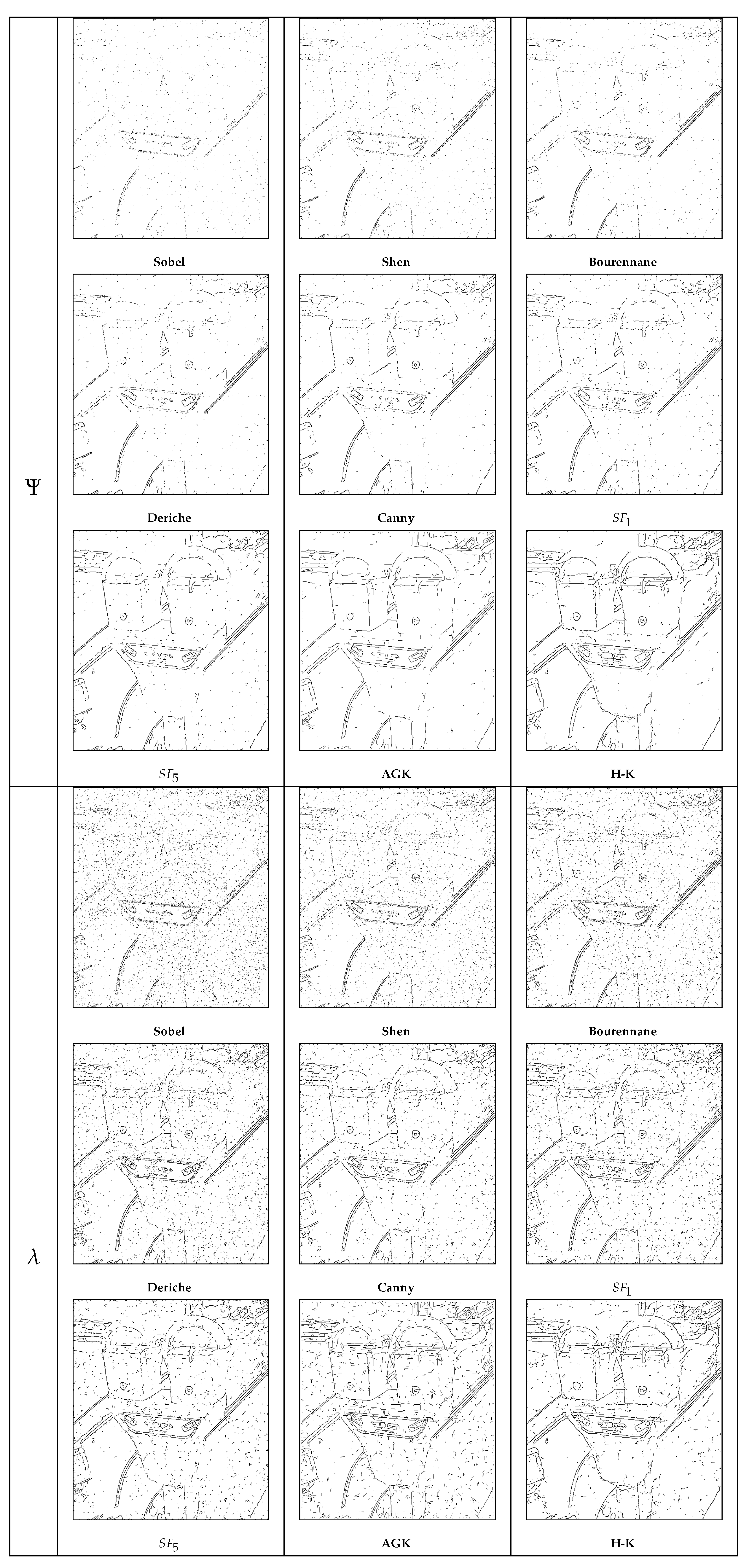
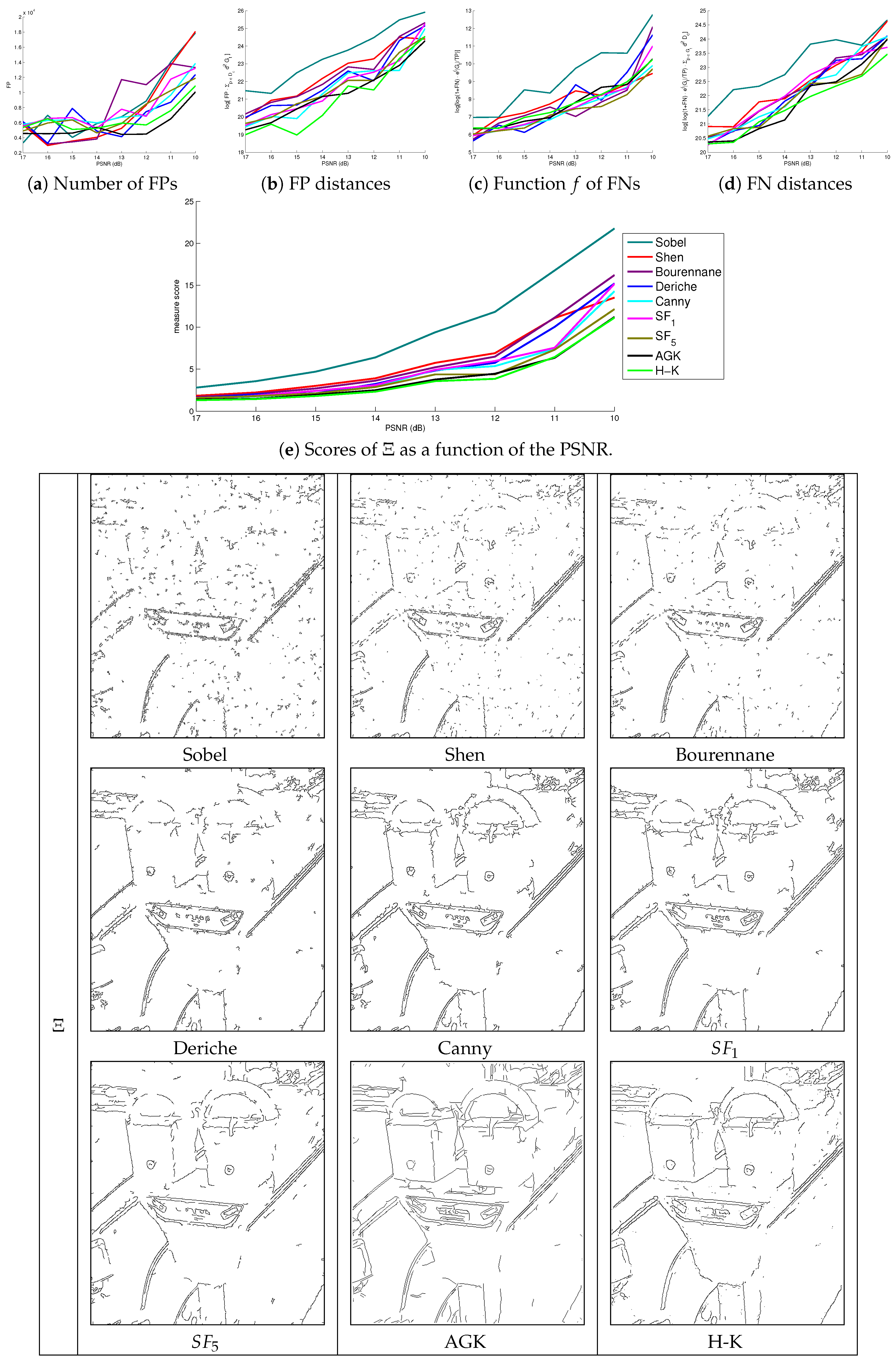
4. Experimental Results
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| Gradient magnitude of an image I | |
| gradient orientation | |
| set of True Positive pixels | |
| set of False Positive pixels | |
| set of False Negative pixels | |
| set of True Negative pixels | |
| Ground truth contour map | |
| Detected contour map | |
| measure | |
| Performance measure | |
| Segmentation Success Ratio | |
| Localization-error | |
| Misclassiffication Error | |
| measure | |
| measure | |
| measure, with | |
| Performance value | |
| Quality Measure focussing on a window W | |
| Failure measure | |
| Pratt’s Figure of Merit | |
| F | Figure of Merit revisited |
| Combination of Figure of Merit and statistics | |
| Edge map quality measure | |
| Symmetric Figure of Merit | |
| Maximum Figure of Merit | |
| Yasnoff measure | |
| H | Hausdorff distance |
| Maximum distance measure | |
| Distance to ground truth, with k a real positive | |
| Over-segmentation measure | |
| Under-segmentation measure | |
| , with k a real positive | |
| Symmetric distance measure, with k a real positive | |
| Baddeley’s Delta Metric | |
| Over-segmentation measure | |
| Complete distance measure | |
| measure | |
| measure | |
| minimal Euclidian distance between a pixel p and | |
| minimal Euclidian distance between a pixel p and | |
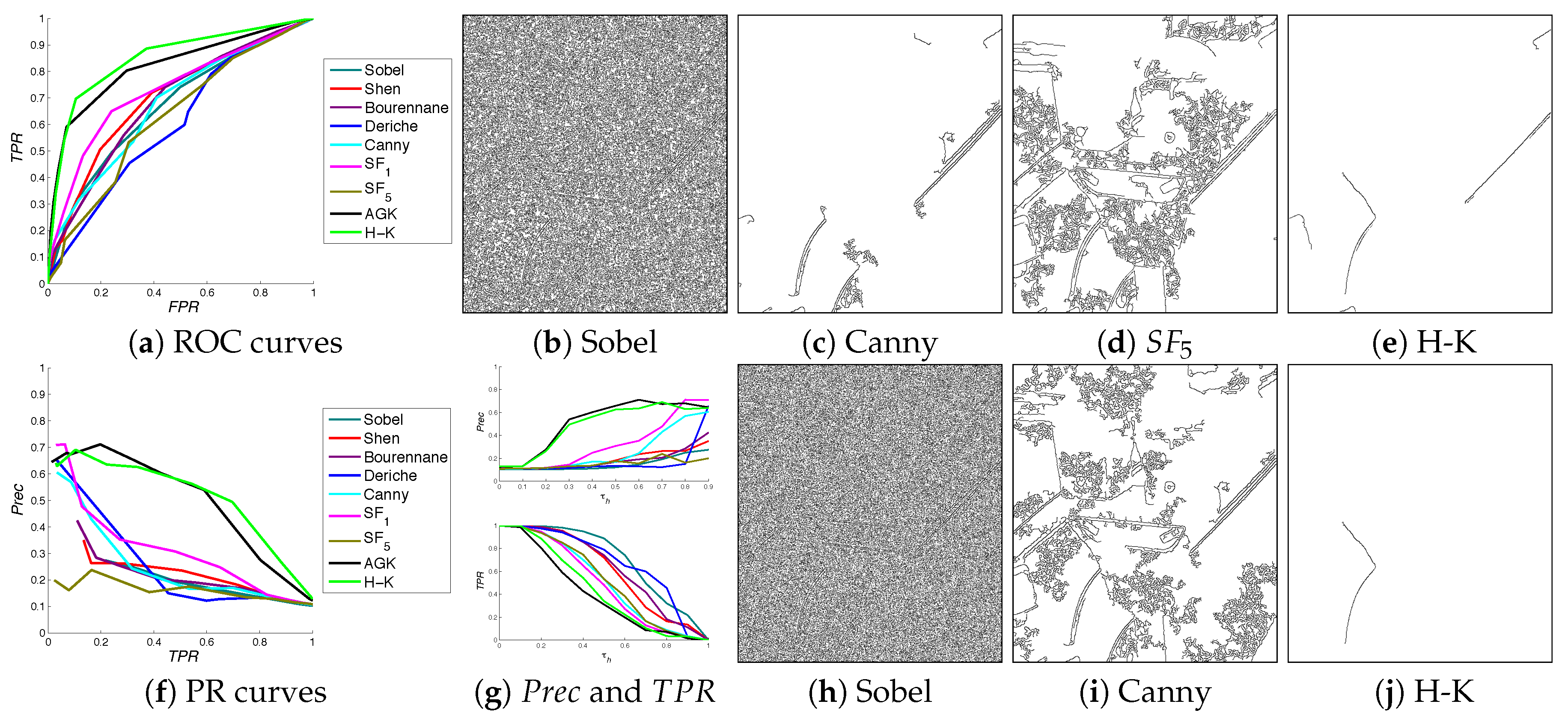
| Sobel | Sobel edge detection method |
| Shen | Shen edge detection method |
| Bourennane | Bourennane edge detection method |
| Deriche | Deriche edge detection method |
| Canny | Canny edge detection method |
| Steerable filter of order 1 | |
| Steerable filter of order 5 | |
| AGK | Anisotropic Gaussian Kernels |
| H-K | Half Gaussian Kernels |
References
- Ziou, D.; Tabbone, S. Edge detection techniques: An overview. Int. J. on Patt. Rec. and Image Anal. 1998, 8, 537–559. [Google Scholar]
- Arbelaez, P.; Maire, M.; Fowlkes, C.; Malik, J. Contour detection and hierarchical image segmentation. IEEE TPAMI 2011, 33, 898–916. [Google Scholar] [CrossRef] [PubMed]
- Sobel, I. Camera Models and Machine Perception. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 1970. [Google Scholar]
- Canny, J. A computational approach to edge detection. IEEE TPAMI 1986, 6, 679–698. [Google Scholar] [CrossRef]
- Shen, J.; Castan, S. An optimal linear operator for step edge detection. CVGIP 1992, 54, 112–133. [Google Scholar] [CrossRef]
- Deriche, R. Using Canny’s criteria to derive a recursively implemented optimal edge detector. IJCV 1987, 1, 167–187. [Google Scholar] [CrossRef]
- Bourennane, E.; Gouton, P.; Paindavoine, M.; Truchetet, F. Generalization of Canny-Deriche filter for detection of noisy exponential edge. Signal Proces. 2002, 82, 1317–1328. [Google Scholar] [CrossRef]
- Marr, D.; Hildreth, E. Theory of edge detection. Proc. R. Soc. Lond. Ser. B Biol. Sci. 1980, 207, 187. [Google Scholar] [CrossRef]
- Freeman, W.T.; Adelson, E.H. The Design and Use of Steerable Filters. IEEE TPAMI 1991, 13, 891–906. [Google Scholar] [CrossRef]
- Jacob, M.; Unser, M. Design of steerable filters for feature detection using Canny-like criteria. IEEE TPAMI 2004, 26, 1007–1019. [Google Scholar] [CrossRef] [PubMed]
- Geusebroek, J.; Smeulders, A.; van de Weijer, J. Fast anisotropic Gauss filtering. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2002; pp. 99–112. [Google Scholar]
- Magnier, B.; Montesinos, P.; Diep, D. Fast anisotropic edge detection using Gamma correction in color images. In Proceedings of the 7th International Symposium on Image and Signal Processing and Analysis (ISPA 2011), Dubrovnik, Croatia, 4–6 September 2011; pp. 212–217. [Google Scholar]
- Martin, D.; Fowlkes, C.; Tal, D.; Malik, J. A database of human segmented natural images and its application to evaluating segmentation algorithms and measuring ecological statistics. In Proceedings of the Eighth IEEE International Conference on Computer Vision, Vancouver, BC, Canada, 7–14 July 2001; Volume 2, pp. 416–423. [Google Scholar]
- Abdulrahman, H.; Magnier, B.; Montesinos, P. From contours to ground truth: How to evaluate edge detectors by filtering. J. WSCG 2017, 25, 133–142. [Google Scholar]
- Heath, M.D.; Sarkar, S.; Sanocki, T.; Bowyer, K.W. A robust visual method for assessing the relative performance of edge-detection algorithms. IEEE TPAMI 1997, 19, 1338–1359. [Google Scholar] [CrossRef]
- Kitchen, L.; Rosenfeld, A. Edge evaluation using local edge coherence. IEEE Trans. Syst. Man Cybern. 1981, 11, 597–605. [Google Scholar] [CrossRef]
- Haralick, R.M.; Lee, J.S. Context dependent edge detection and evaluation. Pattern Recognit. 1990, 23, 1–19. [Google Scholar] [CrossRef]
- Zhu, Q. Efficient evaluations of edge connectivity and width uniformity. Image Vis. Comput. 1996, 14, 21–34. [Google Scholar] [CrossRef]
- Deutsch, E.S.; Fram, J.R. A quantitative study of the orientation bias of some edge detector schemes. IEEE Trans. Comput. 1978, 3, 205–213. [Google Scholar] [CrossRef]
- Venkatesh, S.; Kitchen, L.J. Edge evaluation using necessary components. CVGIP Graph. Models Image Process. 1992, 54, 23–30. [Google Scholar] [CrossRef]
- Magnier, B. Edge detection: A review of dissimilarity evaluations and a proposed normalized measure. Multimed. Tools Appl. 2017, 77, 1–45. [Google Scholar] [CrossRef]
- Strickland, R.N.; Chang, D.K. An adaptable edge quality metric. Optical Eng. 1993, 32, 944–952. [Google Scholar] [CrossRef]
- Nguyen, T.B.; Ziou, D. Contextual and non-contextual performance evaluation of edge detectors. Pattern Recognit. Lett. 2000, 21, 805–816. [Google Scholar] [CrossRef]
- Dubuisson, M.P.; Jain, A.K. A modified Hausdorff distance for object matching. IEEE ICPR 1994, 1, 566–568. [Google Scholar]
- Chabrier, S.; Laurent, H.; Rosenberger, C.; Emile, B. Comparative study of contour detection evaluation criteria based on dissimilarity measures. EURASIP J. Image Video Process. 2008, 2008, 2. [Google Scholar] [CrossRef]
- Lopez-Molina, C.; De Baets, B.; Bustince, H. Quantitative error measures for edge detection. Pattern Recognit. 2013, 46, 1125–1139. [Google Scholar] [CrossRef]
- Jaccard, P. Nouvelles recherches sur la distribution florale. Bulletin de la Societe Vaudoise des Sciences Naturelles 1908, 44, 223–270. [Google Scholar]
- Dice, L.R. Measures of the amount of ecologic association between species. Ecology 1945, 26, 297–302. [Google Scholar] [CrossRef]
- Sneath, P.; Sokal, R. Numerical Taxonomy. The Principles and Practice of Numerical Classification; The University of Chicago Press: Chicago, IL, USA, 1973. [Google Scholar]
- Duda, R.; Hart, P.; Stork, D. Pattern Classification and Scene Analysis, 2nd ed.; Wiley Interscience: New York, NY, USA, 1995. [Google Scholar]
- Grigorescu, C.; Petkov, N.; Westenberg, M. Contour detection based on nonclassical receptive field inhibition. IEEE TIP 2003, 12, 729–739. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Ge, F.; Liu, T. Evaluating edge detection through boundary detection. EURASIP J. Appl. Signal Process. 2006, 2006, 076278. [Google Scholar] [CrossRef]
- Bryant, D.; Bouldin, D. Evaluation of edge operators using relative and absolute grading. In Proceedings of the Conference on Pattern Recognition and Image Processing, Chicago, IL, USA, 6–8 August 1979; pp. 138–145. [Google Scholar]
- Usamentiaga, R.; García, D.F.; López, C.; González, D. A method for assessment of segmentation success considering uncertainty in the edge positions. EURASIP J. Appl. Signal Proc. 2006, 2006, 021746. [Google Scholar] [CrossRef]
- Lee, S.U.; Chung, S.Y.; Park, R.H. A comparative performance study of several global thresholding techniques for segmentation. CVGIP 1990, 52, 171–190. [Google Scholar] [CrossRef]
- Sezgin, M.; Sankur, B. Survey over image thresholding techniques and quantitative performance evaluation. J. Electron. Imaging 2004, 13, 146–166. [Google Scholar]
- Venkatesh, S.; Rosin, P.L. Dynamic threshold determination by local and global edge evaluation. CVGIP 1995, 57, 146–160. [Google Scholar] [CrossRef]
- Yitzhaky, Y.; Peli, E. A method for objective edge detection evaluation and detector parameter selection. IEEE TPAMI 2003, 25, 1027–1033. [Google Scholar] [CrossRef]
- Martin, D.R.; Fowlkes, C.C.; Malik, J. Learning to detect natural image boundaries using local brightness, color, and texture cues. IEEE TPAMI 2004, 26, 530–549. [Google Scholar] [CrossRef] [PubMed]
- Bowyer, K.; Kranenburg, C.; Dougherty, S. Edge detector evaluation using empirical ROC curves. Comput. Vis. Image Underst. 2001, 84, 77–103. [Google Scholar] [CrossRef]
- Forbes, L.A.; Draper, B.A. Inconsistencies in edge detector evaluation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Hilton Head Island, SC, USA, 15 June 2000; Volume 2, pp. 398–404. [Google Scholar]
- Davis, J.; Goadrich, M. The relationship between Precision–Recall and ROC curves. In Proceedings of the 23rd International Conference on Machine Learning, Pittsburgh, PA, USA, 25–29 June 2006; pp. 233–240. [Google Scholar]
- Hou, X.; Yuille, A.; Koch, C. Boundary detection benchmarking: Beyond F-measures. In 2013 IEEE Conference on Computer Vision and Pattern Recognition (CVPR); IEEE: Piscataway Township, NJ, USA, 2013; pp. 2123–2130. [Google Scholar]
- Valverde, F.L.; Guil, N.; Munoz, J.; Nishikawa, R.; Doi, K. An evaluation criterion for edge detection techniques in noisy images. In Proceedings of the International Conference on Image Processing, Thessaloniki, Greece, 7–10 October 2001; Volume 1, pp. 766–769. [Google Scholar]
- Román-Roldán, R.; Gómez-Lopera, J.F.; Atae-Allah, C.; Martınez-Aroza, J.; Luque-Escamilla, P. A measure of quality for evaluating methods of segmentation and edge detection. Pattern Recognit. 2001, 34, 969–980. [Google Scholar] [CrossRef]
- Fernández-Garcıa, N.; Medina-Carnicer, R.; Carmona-Poyato, A.; Madrid-Cuevas, F.; Prieto-Villegas, M. Characterization of empirical discrepancy evaluation measures. Pattern Recognit. Lett. 2004, 25, 35–47. [Google Scholar] [CrossRef]
- Abdou, I.E.; Pratt, W.K. Quantitative design and evaluation of enhancement/thresholding edge detectors. Proc. IEEE 1979, 67, 753–763. [Google Scholar] [CrossRef]
- Pinho, A.J.; Almeida, L.B. Edge detection filters based on artificial neural networks. In ICIAP; Springer: Berlin/Heidelberg, Germany, 1995; pp. 159–164. [Google Scholar]
- Boaventura, A.G.; Gonzaga, A. Method to evaluate the performance of edge detector. In Brazlian Symp. on Comput. Graph. Image Process; Citeseer: State College, PA, USA, 2006; pp. 234–236. [Google Scholar]
- Panetta, K.; Gao, C.; Agaian, S.; Nercessian, S. A New Reference-Based Edge Map Quality Measure. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 1505–1517. [Google Scholar] [CrossRef]
- Yasnoff, W.; Galbraith, W.; Bacus, J. Error measures for objective assessment of scene segmentation algorithms. Anal. Quant. Cytol. 1978, 1, 107–121. [Google Scholar]
- Huttenlocher, D.; Rucklidge, W. A multi-resolution technique for comparing images using the hausdorff distance. In Proceedings of the Computer Vision and Pattern Recognition (IEEE CVPR), New York, NY, USA, 15–17 June 1993; pp. 705–706. [Google Scholar]
- Peli, T.; Malah, D. A Study of Edge Detection Algorithms; CGIP: Indianapolis, IN, USA, 1982; Volume 20, pp. 1–21. [Google Scholar]
- Odet, C.; Belaroussi, B.; Benoit-Cattin, H. Scalable discrepancy measures for segmentation evaluation. In Proceedings of the 2002 International Conference on Image Processing, Rochester, NY, USA, 22–25 September 2002; Volume 1, pp. 785–788. [Google Scholar]
- Yang-Mao, S.F.; Chan, Y.K.; Chu, Y.P. Edge enhancement nucleus and cytoplast contour detector of cervical smear images. IEEE Trans. Syst. Man Cybern. Part B 2008, 38, 353–366. [Google Scholar] [CrossRef] [PubMed]
- Magnier, B. An objective evaluation of edge detection methods based on oriented half kernels. In Proceedings of the Illinois Consortium for International Studies and Programs (ICISP), Normandy, France, 2–4 July 2018. [Google Scholar]
- Baddeley, A.J. An error metric for binary images. In Robust Computer Vision: Quality of Vision Algorithms; Wichmann: Bonn, Germany, 1992; pp. 59–78. [Google Scholar]
- Magnier, B.; Le, A.; Zogo, A. A Quantitative Error Measure for the Evaluation of Roof Edge Detectors. In Proceedings of the 2016 IEEE International Conference on Imaging Systems and Techniques (IST), Chania, Greece, 4–6 October 2016; pp. 429–434. [Google Scholar]
- Abdulrahman, H.; Magnier, B.; Montesinos, P. A New Objective Supervised Edge Detection Assessment using Hysteresis Thresholds. In International Conference on Image Analysis and Processing; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Chabrier, S.; Laurent, H.; Emile, B.; Rosenberger, C.; Marche, P. A comparative study of supervised evaluation criteria for image segmentation. In Proceedings of the European Signal Processing Conference, Vienna, Austria, 6–10 September 2004; pp. 1143–1146. [Google Scholar]
- Hemery, B.; Laurent, H.; Emile, B.; Rosenberger, C. Comparative study of localization metrics for the evaluation of image interpretation systems. J. Electron. Imaging 2010, 19, 023017. [Google Scholar]
- Paumard, J. Robust comparison of binary images. Pattern Recognit. Lett. 1997, 18, 1057–1063. [Google Scholar] [CrossRef]
- Zhao, C.; Shi, W.; Deng, Y. A new Hausdorff distance for image matching. Pattern Recognit. Lett. 2005, 26, 581–586. [Google Scholar] [CrossRef]
- Baudrier, É.; Nicolier, F.; Millon, G.; Ruan, S. Binary-image comparison with local-dissimilarity quantification. Pattern Recognit. 2008, 41, 1461–1478. [Google Scholar] [CrossRef]
- Perona, P. Steerable-scalable kernels for edge detection and junction analysis. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 1992; Volume 10, pp. 3–18. [Google Scholar]
- Shui, P.L.; Zhang, W.C. Noise-robust edge detector combining isotropic and anisotropic Gaussian kernels. Pattern Recognit. 2012, 45, 806–820. [Google Scholar] [CrossRef]
- Laligant, O.; Truchetet, F.; Meriaudeau, F. Regularization preserving localization of close edges. IEEE Signal Process. Lett. 2007, 14, 185–188. [Google Scholar] [CrossRef]
- De Micheli, E.; Caprile, B.; Ottonello, P.; Torre, V. Localization and noise in edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 1106–1117. [Google Scholar] [CrossRef]
- Lopez-Molina, C.; Bustince, H.; De Baets, B. Separability criteria for the evaluation of boundary detection benchmarks. IEEE Trans. Image Process. 2016, 25, 1047–1055. [Google Scholar] [CrossRef] [PubMed]


















































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Operator | Fixed Operator [3,4,5,6,7] | Oriented Filters [9,10,11] | Half Gaussian Kernels [12] |
|---|---|---|---|
| Gradient magnitude | |||
| Gradient direction |
| Complemented measure [28] | |
| Complemented [29,30,31,32] | |
| Complemented Absolute Grading [33] | |
| Complemented Segmentation Success Ratio [34] | |
| [35] | |
| [36] | |
| Complemented measure [37] | |
| Complemented measure [38] | |
| Complemented measure [39] | , with |
| K | w | b | p | h | |||
|---|---|---|---|---|---|---|---|
| 1.7 | 1.1 | 0.013 | 0.15 | 4.5 | 0.37 | 0.086 | 8.9 |
| Error Measure Name | Formulation | Parameters |
|---|---|---|
| Pratt’s Figure of Merit (FoM) [47] | ||
| revisited [48] | and | |
| Combination of and statistics [49] | and | |
| Edge map quality measure [50] | ||
| Symmetric FoM [21] | ||
| Maximum FoM [21] | ||
| Yasnoff measure [51] | None | |
| Hausdorff distance [52] | None | |
| Maximum distance [24] | None | |
| Distance to [24,26,53] | , for [24,53] | |
| Oversegmentation [54] | for [54]: and | |
| Under-segmentation [54] | for [54]: and | |
| [24,55,56] | , | , for [24], for [55,56] |
| Symmetric distance [24,26] | , for [24] | |
| Baddeley’s Delta Metric [57] | and a convex function | |
| Magnier et al. measure [58] | None | |
| Complete distance measure [21] | None | |
| measure [59] | None |
| Measure | Segmentation Reliability | Monotonic Curves | Filter Qualification |
|---|---|---|---|
| ≈ | ✓ | ✗ | |
| ≈ | ✓ | ✗ | |
| ≈ | ✓ | ✗ | |
| ✗ | ✓ | ✗ | |
| ≈ | ✓ | ✗ | |
| ✗ | ✓ | ✗ | |
| ≈ | ✓ | ✗ | |
| ✗ | ✓ | ≈ | |
| ✗ | ✓ | ✗ | |
| ✓ | ✓ | ≈ | |
| ✗ | ✓ | ✗ | |
| H | ✗ | ✗ | ✗ |
| ✗ | ✗ | ✗ | |
| ≈ | ✗ | ✗ | |
| ✗ | ✓ | ✗ | |
| F | ≈ | ✓ | ✗ |
| ≈ | ✓ | ✗ | |
| ≈ | ✓ | ✗ | |
| ≈ | ✓ | ✗ | |
| ✗ | ✓ | ✗ | |
| ≈ | ✓ | ✓ | |
| ≈ | ✓ | ✓ | |
| ✓ | ✓ | ✓ | |
| ✓ | ≈ | ✓ | |
| ≈ | ✓ | ≈ | |
| ≈ | ✓ | ✗ | |
| ≈ | ✓ | ✗ | |
| ≈ | ✓ | ≈ | |
| ✓ | ✓ | ✓ |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Magnier, B.; Abdulrahman, H.; Montesinos, P. A Review of Supervised Edge Detection Evaluation Methods and an Objective Comparison of Filtering Gradient Computations Using Hysteresis Thresholds. J. Imaging 2018, 4, 74. https://doi.org/10.3390/jimaging4060074
Magnier B, Abdulrahman H, Montesinos P. A Review of Supervised Edge Detection Evaluation Methods and an Objective Comparison of Filtering Gradient Computations Using Hysteresis Thresholds. Journal of Imaging. 2018; 4(6):74. https://doi.org/10.3390/jimaging4060074
Chicago/Turabian StyleMagnier, Baptiste, Hasan Abdulrahman, and Philippe Montesinos. 2018. "A Review of Supervised Edge Detection Evaluation Methods and an Objective Comparison of Filtering Gradient Computations Using Hysteresis Thresholds" Journal of Imaging 4, no. 6: 74. https://doi.org/10.3390/jimaging4060074
APA StyleMagnier, B., Abdulrahman, H., & Montesinos, P. (2018). A Review of Supervised Edge Detection Evaluation Methods and an Objective Comparison of Filtering Gradient Computations Using Hysteresis Thresholds. Journal of Imaging, 4(6), 74. https://doi.org/10.3390/jimaging4060074