Edge-Based Color Image Segmentation Using Particle Motion in a Vector Image Field Derived from Local Color Distance Images


Abstract
:1. Introduction
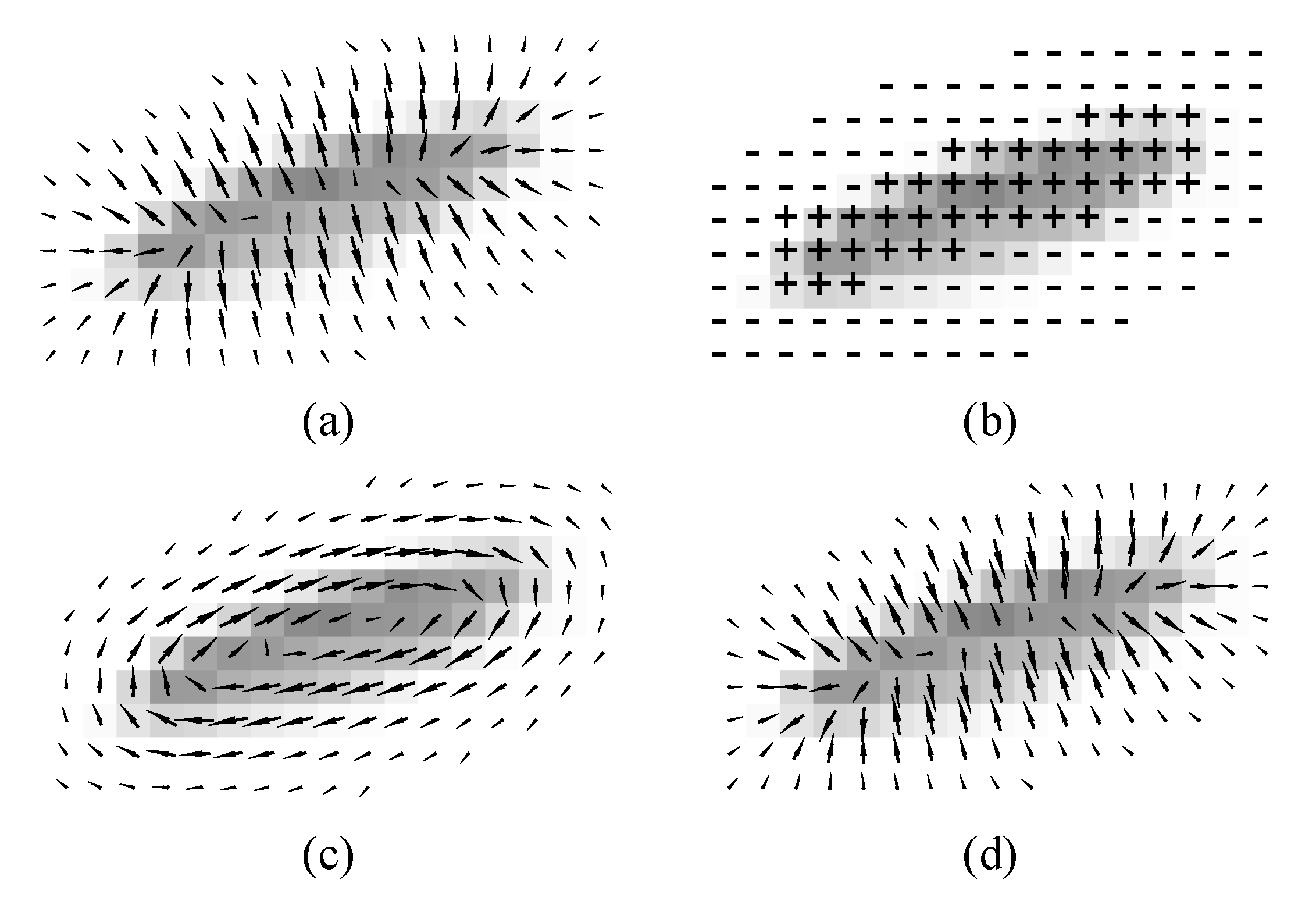
2. Background to Particle Motion in a Vector Image Field
3. Methodology
3.1. Image Moments
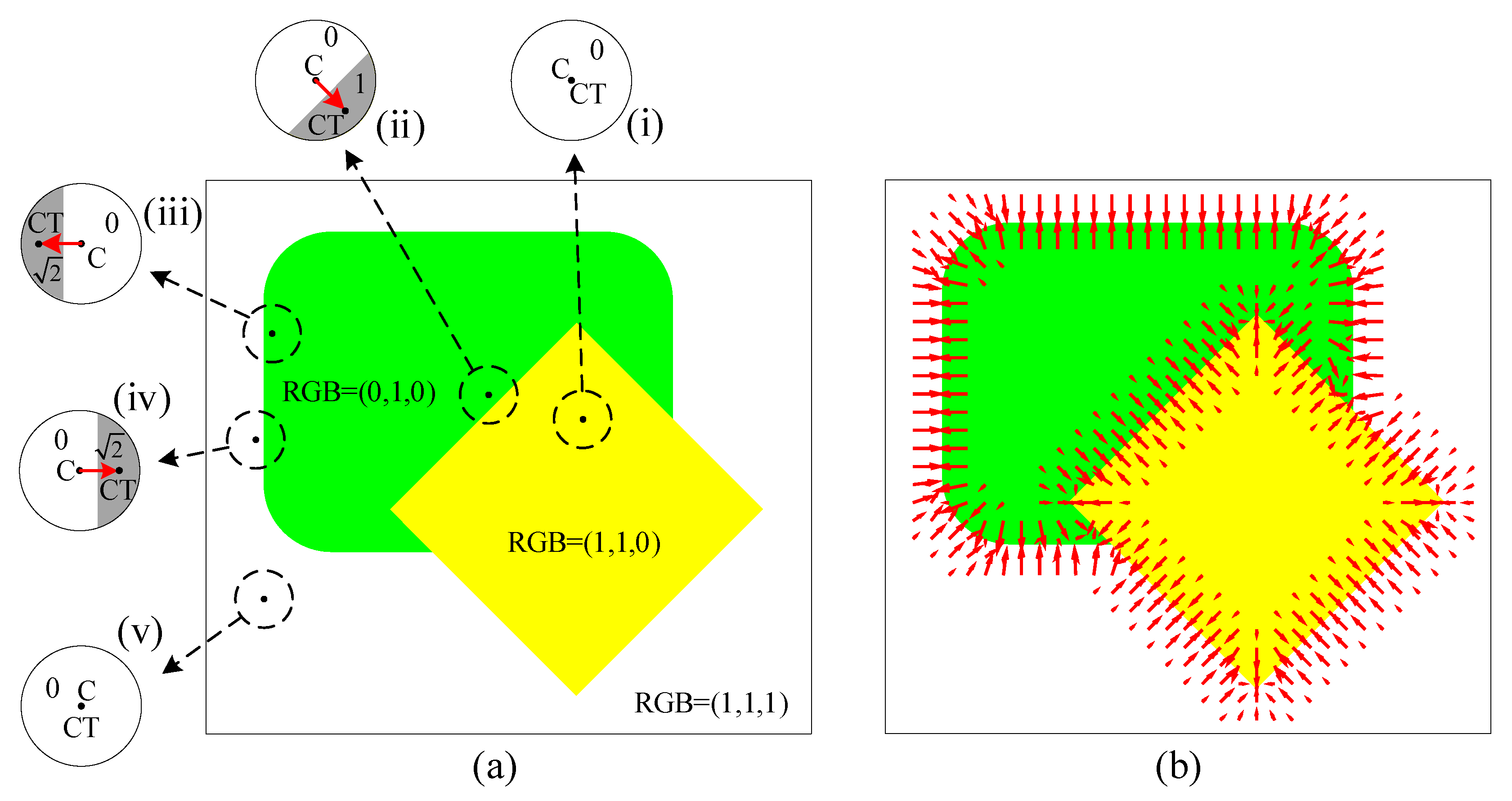
3.2. Local Color Distance Images
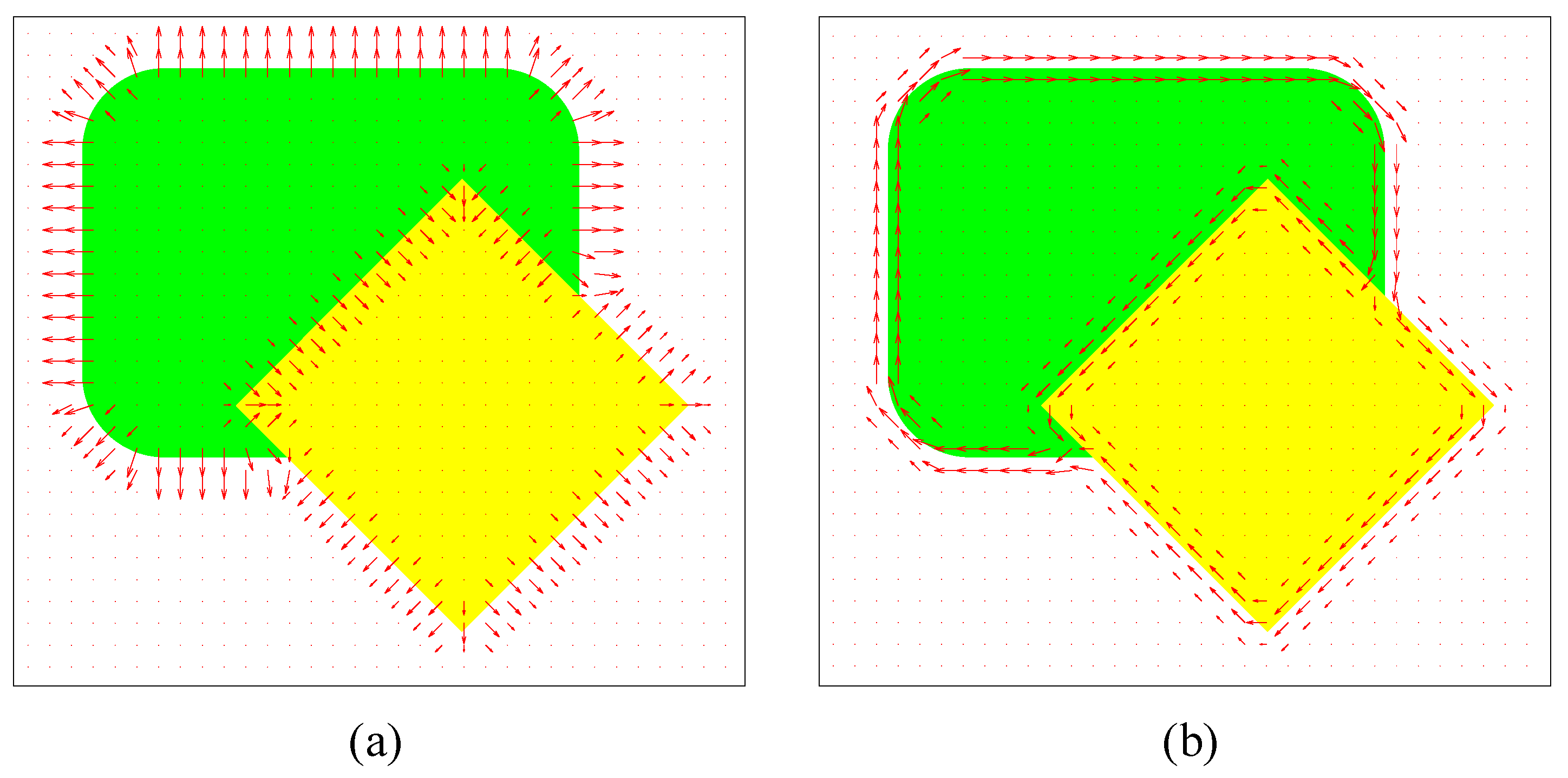
3.3. The Normal Compressive Vector Field
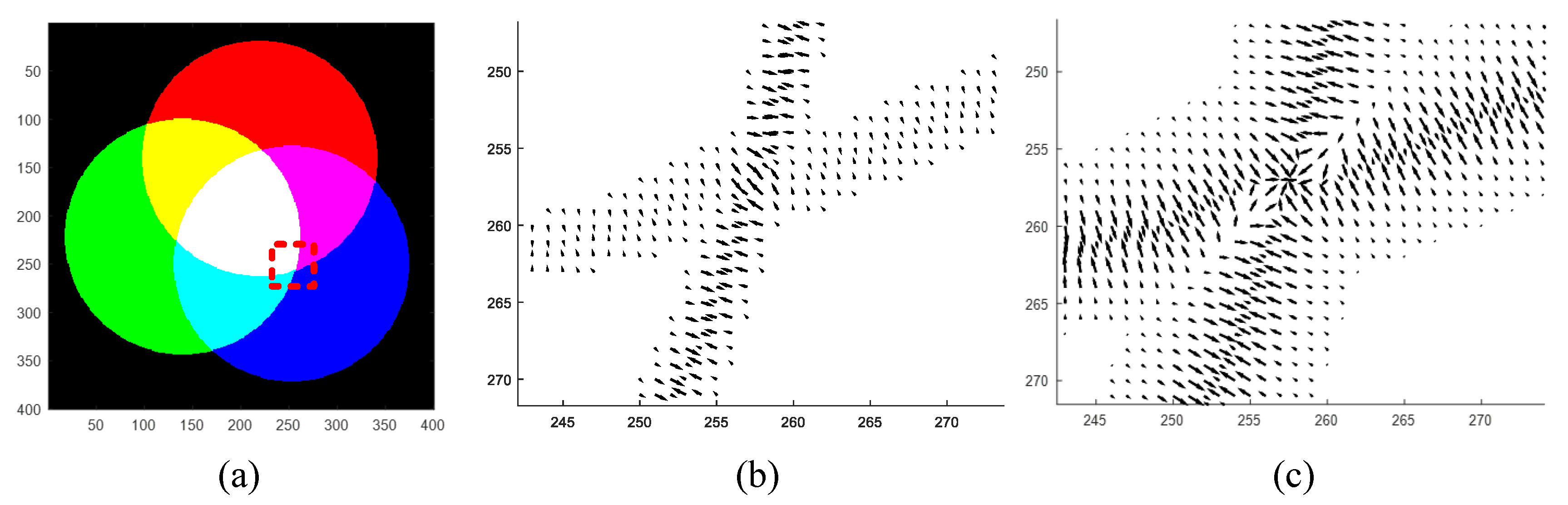
3.4. The Edge Vector Field
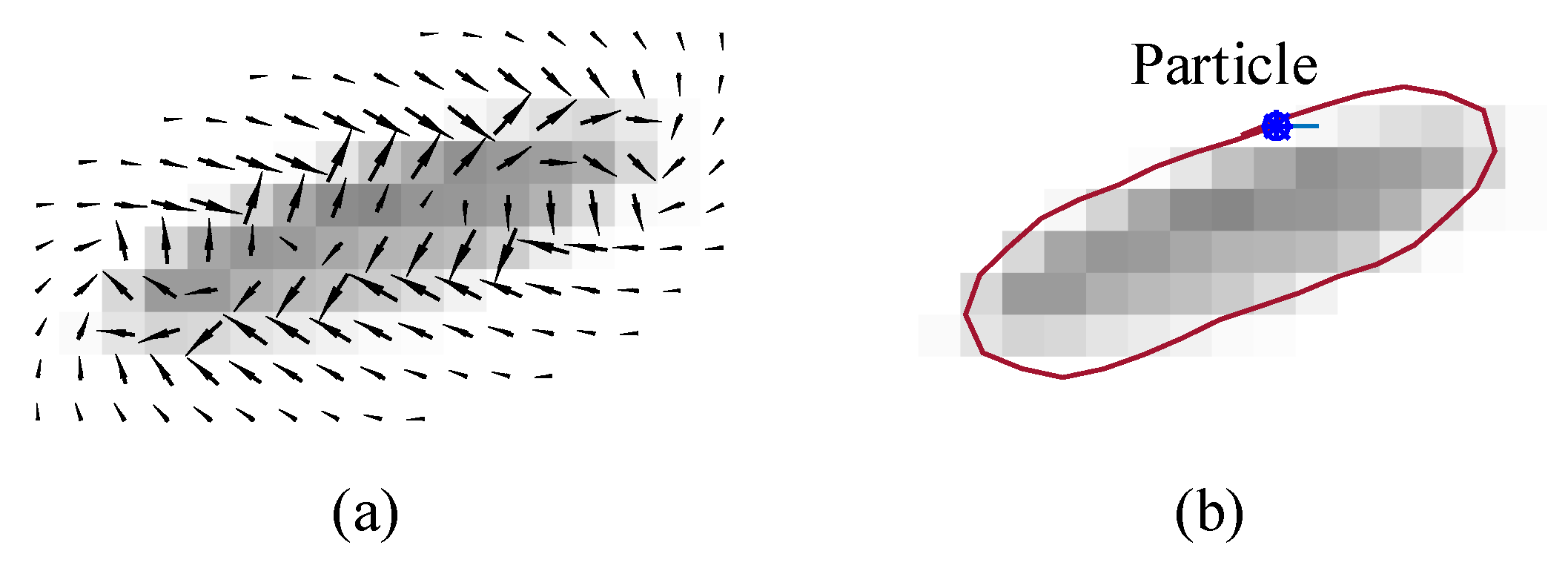
3.5. Particle Motion in a Vector Image Field Derived from Local Color Distance Images
3.6. Appropriate PMLCD Parameter Setting
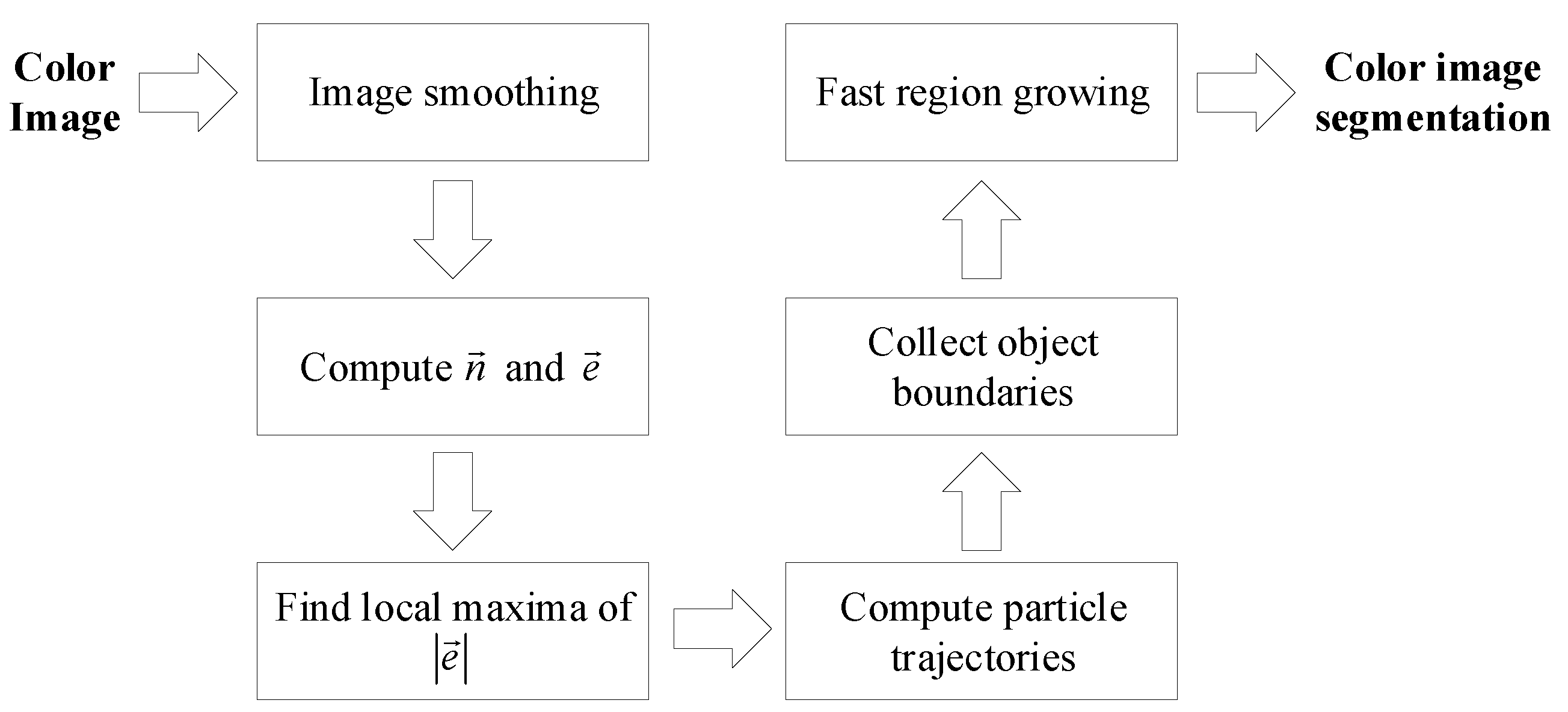
3.7. Overall Boundary Extraction Method
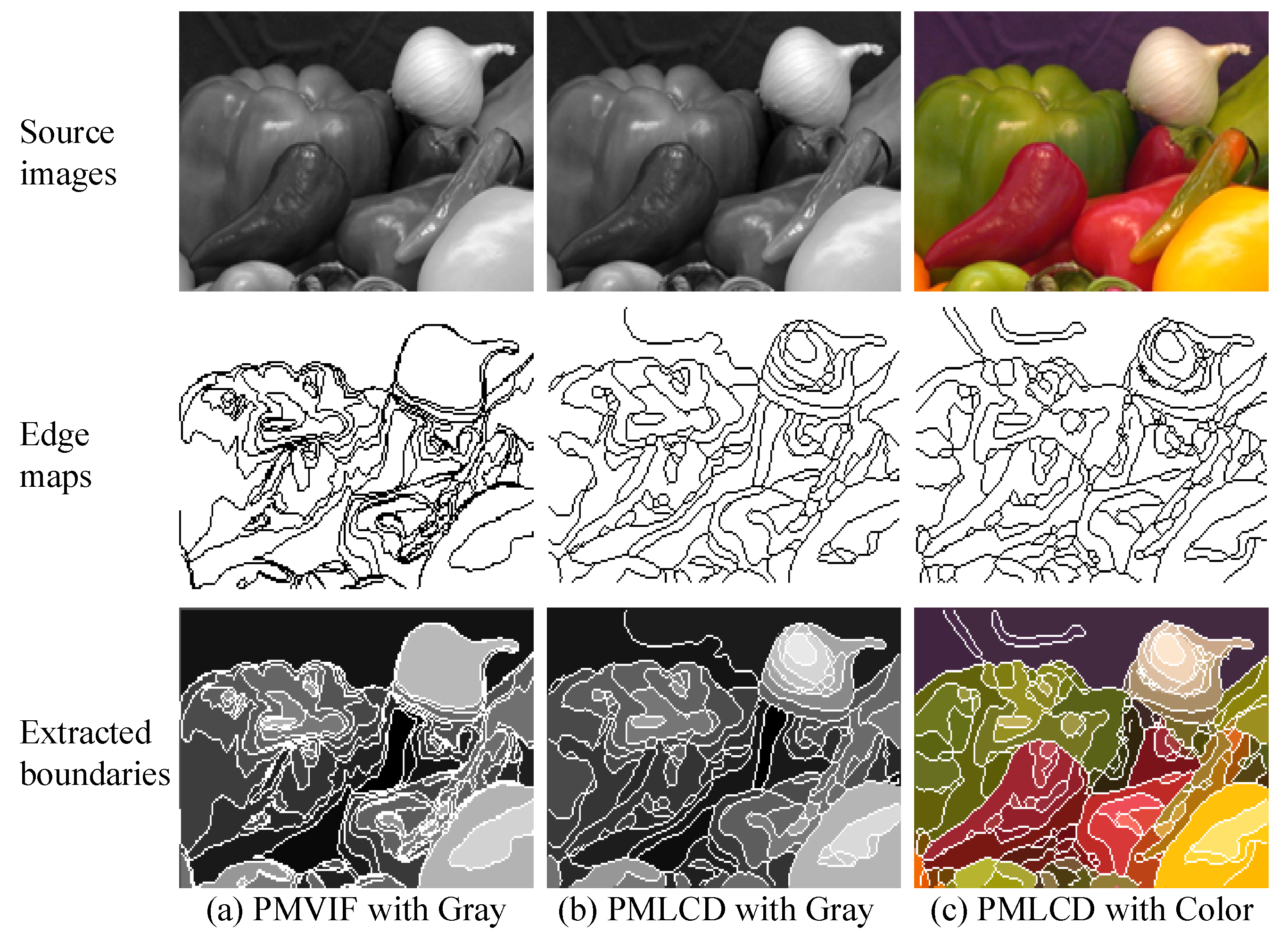
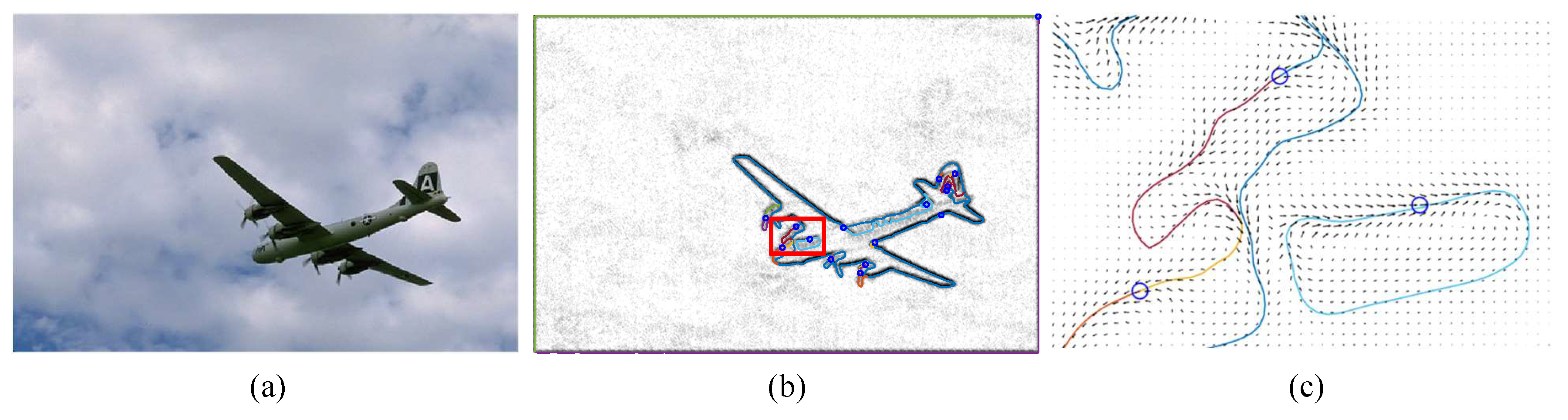
4. Experimental Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Minaee, S.; Boykov, Y.; Porikli, F.; Plaza, A.; Kehtarnavaz, N.; Terzopoulos, D. Image Segmentation Using Deep Learning: A Survey. arXiv 2020, arXiv:cs.CV/2001.05566. [Google Scholar]
- MacQueen, J. Some methods for classification and analysis of multivariate observations. In Proceedings of the Fifth Berkeley Symposium on Mathematical Statistics and Probability, Volume 1: Statistics; University of California Press: Berkeley, CA, USA, 1967; pp. 281–297. [Google Scholar]
- Hamada, M.A.; Kanat, Y.; Abiche, A.E. Multi-Spectral Image Segmentation Based on the K-means Clustering. Int. J. Innov. Technol. Explor. Eng. 2019, 9, 1016–1019. [Google Scholar] [CrossRef]
- Fukunaga, K.; Hostetler, L.D. The Estimation of the Gradient of a Density Function, with Applications in Pattern Recognition. IEEE Trans. Inf. Theory 1975, 21, 32–40. [Google Scholar] [CrossRef] [Green Version]
- Xiao, W.; Zaforemska, A.; Smigaj, M.; Wang, Y.; Gaulton, R. Mean shift segmentation assessment for individual forest tree delineation from airborne lidar data. Remote Sens. 2019, 11, 1263. [Google Scholar] [CrossRef] [Green Version]
- Deng, Y.; Manjunath, B.S. Unsupervised segmentation of color-texture regions in images and video. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 800–810. [Google Scholar] [CrossRef] [Green Version]
- Aloun, M.S.; Hitam, M.S.; Yussof, W.N.J.H.W.; Abdul Hamid, A.A.K.; Bachok, Z. Modified JSEG algorithm for reducing over-segmentation problems in underwater coral reef images. Int. J. Electr. Comput. Eng. 2019, 9, 5244–5252. [Google Scholar] [CrossRef]
- Sahba, F.; Tizhoosh, H.R.; Salama, M.M. A reinforcement learning framework for medical image segmentation. In Proceedings of the IEEE International Conference on Neural Networks, Vancouver, BC, Canada, 16–21 July 2006; pp. 511–517. [Google Scholar] [CrossRef]
- Wang, Z.; Sarcar, S.; Liu, J.; Zheng, Y.; Ren, X. Outline Objects using Deep Reinforcement Learning. arXiv 2018, arXiv:1804.04603. [Google Scholar]
- Casanova, A.; Pinheiro, P.O.; Rostamzadeh, N.; Pal, C.J. Reinforced active learning for image segmentation. arXiv 2020, arXiv:2002.06583. [Google Scholar]
- Alom, M.Z.; Taha, T.M.; Yakopcic, C.; Westberg, S.; Sidike, P.; Nasrin, M.S.; Hasan, M.; Van Essen, B.C.; Awwal, A.A.; Asari, V.K. A state-of-the-art survey on deep learning theory and architectures. Electronics 2019, 8, 292. [Google Scholar] [CrossRef] [Green Version]
- Bhargavi, K.; Jyothi, S. A Survey on Threshold Based Segmentation Technique in Image Processing. Int. J. Innov. Res. Dev. 2014, 3, 234–239. [Google Scholar]
- Doyle, W. Operations Useful for Similarity-Invariant Pattern Recognition. J. ACM 1962, 9, 259–267. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method From Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, SMC-9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Duan, L.; Wang, Y. Fast Image Segmentation Using Two-Dimensional Otsu Based on Estimation of Distribution Algorithm. J. Electr. Comput. Eng. 2017, 2017, 1735176. [Google Scholar] [CrossRef] [Green Version]
- Nakagawa, Y.; Rosenfeld, A. Some experiments on variable thresholding. Pattern Recognit. 1979, 11, 191–204. [Google Scholar] [CrossRef]
- Chow, C.; Kaneko, T. Boundary Detection of Radiographic Images by a Threshold Method. In Frontiers of Pattern Recognition; Academic Press: Cambridge, MA, USA, 1971; pp. 1530–1535. [Google Scholar] [CrossRef]
- Chow, C.K.; Kaneko, T. Automatic boundary detection of the left ventricle from cineangiograms. Comput. Biomed. Res. 1972, 5, 388–410. [Google Scholar] [CrossRef]
- Kimmel, R.; Bruckstein, A.M. Regularized Laplacian zero crossings as optimal edge integrators. Int. J. Comput. Vis. 2003, 53, 225–243. [Google Scholar] [CrossRef]
- Baştan, M.; Bukhari, S.S.; Breuel, T. Active Canny: Edge detection and recovery with open active contour models. IET Image Process. 2017, 11, 1325–1332. [Google Scholar] [CrossRef] [Green Version]
- Eua-Anant, N.; Udpa, L. A novel boundary extraction algorithm based on a vector image model. In Proceedings of the 39th Midwest Symposium on Circuits and Systems, Ames, IA, USA, 21 August 1996; Volume 2, pp. 597–600. [Google Scholar] [CrossRef]
- Eua-anant, N.; Lalita, U.; Upda, L. Boundary extraction algorithm based on particle motion in a vector image field. In Proceedings of the International Conference on Image Processing, Santa Barbara, CA, USA, 26–29 October 1997; Volume 2, pp. 732–735. [Google Scholar] [CrossRef]
- Eua-Anant, N.; Udpa, L. Boundary detection using simulation of particle motion in a vector image field. IEEE Trans. Image Process. 1999, 8, 1560–1571. [Google Scholar] [CrossRef]
- Ma, W.Y.; Manjunath, B.S. EdgeFlow: A Technique for Boundary Detection and Image Segmentation. IEEE Trans. Image Process. 2000, 9, 1375–1388. [Google Scholar]
- Yang, F.; Bruckstein, A.M.; Cohen, L.D. PointFlow: A model for automatically tracing object boundaries and inferring illusory contours. In International Workshop on Energy Minimization Methods in Computer Vision and Pattern Recognition; Springer: Cham, Switzerland, 2017. [Google Scholar] [CrossRef]
- Beucher, S.; Lantuejoul, C. Use of Watersheds in Contour Detection. In Proceedings of the International Workshop on Image Processing; CCETT/IRISA: Rennes, France, 1979. [Google Scholar]
- Kornilov, A.S.; Safonov, I.V. An overview of watershed algorithm implementations in open source libraries. J. Imaging 2018, 4, 123. [Google Scholar] [CrossRef] [Green Version]
- Greig, D.M.; Porteous, B.T.; Seheult, A. Exact Maximum A Posteriori Estimation for Binary Images. J. R. Stat. Soc. Ser. B 1989, 51, 271–279. [Google Scholar] [CrossRef]
- Wang, T.; Ji, Z.; Sun, Q.; Chen, Q.; Ge, Q.; Yang, J. Diffusive likelihood for interactive image segmentation. Pattern Recognit. 2018, 79, 440–451. [Google Scholar] [CrossRef]
- Shi, J.; Malik, J. Normalized cuts and image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 888–905. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Janowczyk, A.; Chandran, S.; Madabhushi, A. A weighted mean shift, normalized cuts initialized color gradient based geodesic active contour model: Applications to histopathology image segmentation. In Medical Imaging 2010: Image Processing; International Society for Optics and Photonics: Bellingham, WA, USA, 2010; Volume 7623, p. 76230Y. [Google Scholar] [CrossRef]
- Ren, X.; Malik, J. Learning a classification model for segmentation. Proc. IEEE Int. Conf. Comput. Vis. 2003, 1, 10–17. [Google Scholar] [CrossRef] [Green Version]
- Daoud, M.I.; Atallah, A.A.; Awwad, F.; Al-Najjar, M.; Alazrai, R. Automatic superpixel-based segmentation method for breast ultrasound images. Expert Syst. Appl. 2019, 121, 78–96. [Google Scholar] [CrossRef]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A. SLIC Superpixels Compared to State-of-the-Art Superpixel Methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Z.; Chen, J. Superpixel segmentation using Linear Spectral Clustering. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1356–1363. [Google Scholar] [CrossRef]
- Hu, M.K. Visual Pattern Recognition by Moment Invariants. IRE Trans. Inf. Theory 1962, 8, 179–187. [Google Scholar] [CrossRef] [Green Version]
- Everingham, M.; Van Gool, L.; Williams, C.K.; Winn, J.; Zisserman, A. The pascal visual object classes (VOC) challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef] [Green Version]
- Martin, D.; Fowlkes, C.; Tal, D.; Malik, J. A Database of Human Segmented Natural Images and its Application to Evaluating Segmentation Algorithms and Measuring Ecological Statistics. In Proceedings of the Eighth IEEE International Conference on Computer Vision, Vancouver, BC, Canada, 7–14 July 2001; Volume 2, pp. 416–423. [Google Scholar] [CrossRef] [Green Version]
- Majid, H.; Hadi Yazdani, B. Color Image Segmentation Metrics. In Encyclopedia of Image Processing; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar] [CrossRef]
- Reichart, R.; Rappoport, A. The NVI clustering evaluation measure. In Proceedings of the CoNLL 2009—Proceedings of the Thirteenth Conference on Computational Natural Language Learning, Boulder, CO, USA, 4–5 June 2009; pp. 165–173. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Method | By Image | By Object | Parameter | ||||
|---|---|---|---|---|---|---|---|---|
| RI | GCE | NVI | BDE | Time | Dice | |||
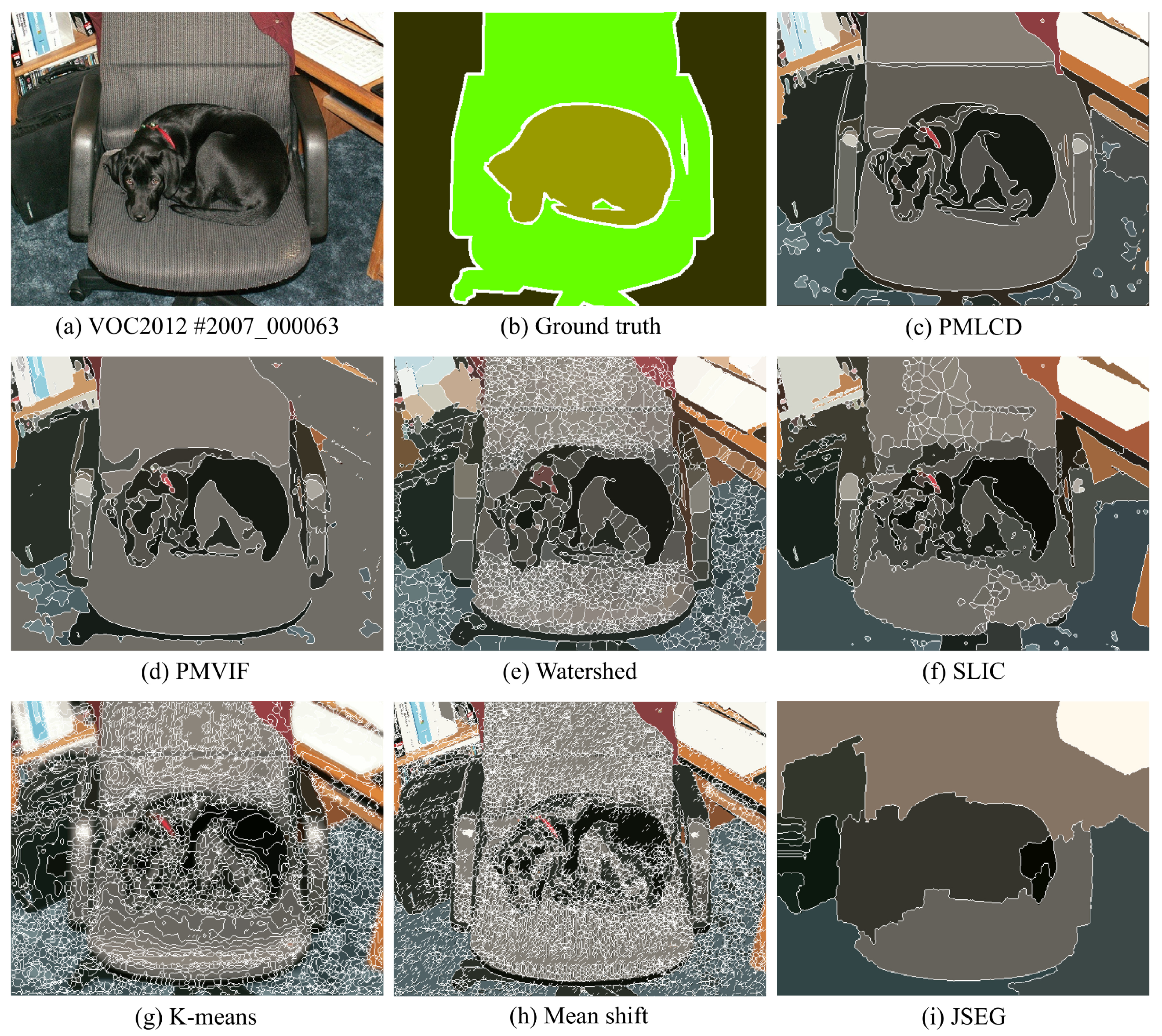
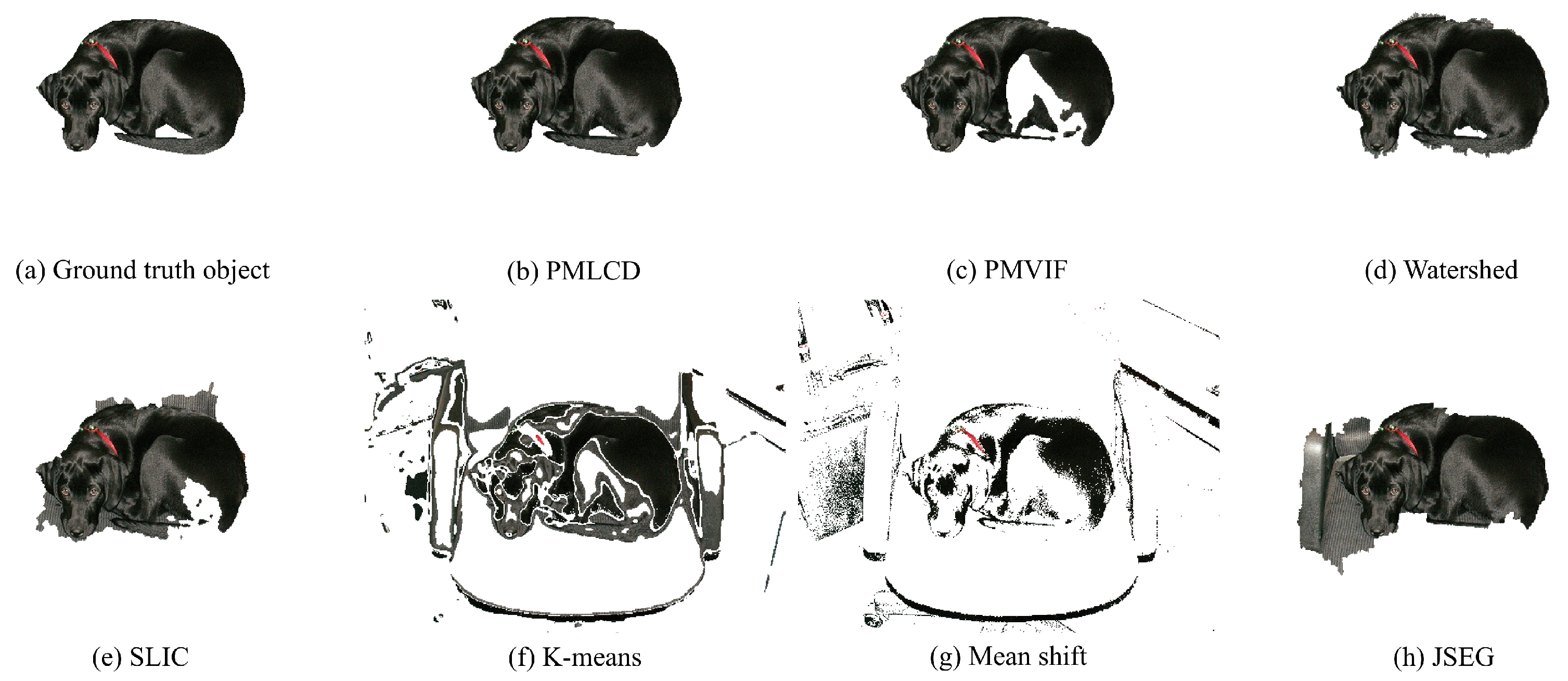
| VOC2012 #2007_000063 | PMLCD | 0.67 | 0.09 | 0.15 | 16.66 | 0.21s | 0.97 | LCD radius 1, 0.17(), 0.06(0.52,0.48) |
| PMVIF | 0.63 | 0.30 | 0.15 | 14.87 | 0.49s | 0.87 | 0.16(), 0.06(0.50,0.50) | |
| Watershed | 0.62 | 0.06 | 0.34 | 13.96 | 0.08s | 0.96 | Level 0.10 | |
| SLIC | 0.64 | 0.15 | 0.20 | 13.87 | 12.99s | 0.88 | Number of SuperPixels 20 | |
| K-means | 0.63 | 0.23 | 0.24 | 14.02 | 12.78s | 0.63 | Number of clusters 100 | |
| Mean shift | 0.62 | 0.29 | 0.28 | 13.92 | 147.71s | 0.47 | Bandwidth 0.02 | |
| JSEG | 0.66 | 0.30 | 0.12 | 18.69 | 84.38s | 0.79 | Color quantization 20 | |
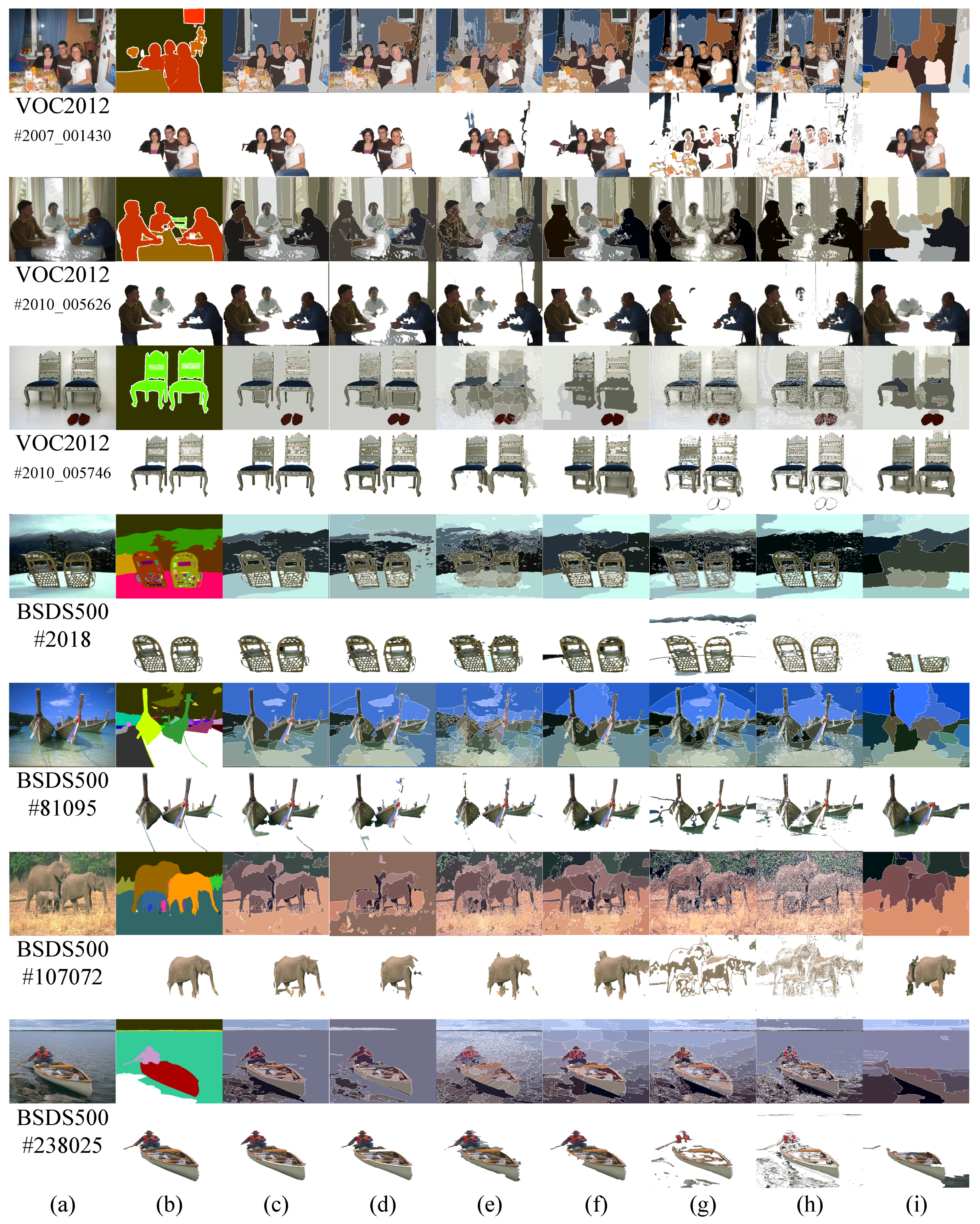
| VOC2012 #2007_001430 | PMLCD | 0.62 | 0.09 | 0.17 | 18.75 | 0.41s | 0.95 | LCD radius 2, 0.22(), 0.00(0.50,0.50) |
| PMVIF | 0.60 | 0.14 | 0.20 | 16.59 | 0.75s | 0.90 | 0.13(), 0.00(0.50,0.50) | |
| Watershed | 0.60 | 0.08 | 0.23 | 16.85 | 0.07s | 0.90 | Level 0.08 | |
| SLIC | 0.60 | 0.11 | 0.18 | 16.05 | 3.92s | 0.90 | Number of SuperPixels 30 | |
| K-means | 0.58 | 0.49 | 0.16 | 16.98 | 2.12s | 0.41 | Number of clusters 8 | |
| Mean shift | 0.57 | 0.47 | 0.18 | 18.11 | 53.50s | 0.43 | Bandwidth 0.07 | |
| JSEG | 0.62 | 0.16 | 0.13 | 21.92 | 60.72s | 0.83 | Color quantization 10 | |
| VOC2012 #2010_005626 | PMLCD | 0.65 | 0.12 | 0.17 | 17.43 | 0.39s | 0.90 | LCD radius 2, 0.16(), 0.30(0.70,0.30) |
| PMVIF | 0.60 | 0.24 | 0.20 | 16.24 | 0.64s | 0.78 | 0.12(), 0.30(0.50,0.50) | |
| Watershed | 0.60 | 0.17 | 0.27 | 19.33 | 0.07s | 0.83 | Level 0.05 | |
| SLIC | 0.64 | 0.13 | 0.17 | 15.54 | 4.35s | 0.88 | Number of SuperPixels 20 | |
| K-means | 0.63 | 0.40 | 0.14 | 16.73 | 2.03s | 0.78 | Number of clusters 8 | |
| Mean shift | 0.65 | 0.38 | 0.09 | 19.75 | 1.96s | 0.79 | Bandwidth 0.25 | |
| JSEG | 0.64 | 0.20 | 0.14 | 20.19 | 71.54s | 0.85 | Color quantization 19 | |
| VOC2012 #2010_005746 | PMLCD | 0.82 | 0.05 | 0.09 | 7.65 | 0.19s | 0.93 | LCD radius 1, 0.21(), 0.00(0.50,0.50) |
| PMVIF | 0.73 | 0.05 | 0.12 | 4.26 | 0.45s | 0.91 | 0.18(), 0.00(0.50,0.50) | |
| Watershed | 0.37 | 0.11 | 0.30 | 19.40 | 0.07s | 0.82 | Level 0.01 | |
| SLIC | 0.46 | 0.16 | 0.15 | 7.59 | 4.13s | 0.75 | Number of SuperPixels 5 | |
| K-means | 0.37 | 0.16 | 0.24 | 9.28 | 10.62s | 0.74 | Number of clusters 100 | |
| Mean shift | 0.41 | 0.17 | 0.23 | 13.43 | 373.74s | 0.71 | Bandwidth 0.02 | |
| JSEG | 0.46 | 0.14 | 0.14 | 14.47 | 36.85s | 0.77 | Color quantization 2 | |
| BSDS500 #2018 | PMLCD | 0.90 | 0.21 | 0.09 | 5.43 | 0.20s | 0.92 | LCD radius 1, 0.24(), 0.35(0.86,0.14) |
| PMVIF | 0.75 | 0.46 | 0.14 | 4.32 | 0.49s | 0.92 | 0.19(), 0.35(0.52,0.48) | |
| Watershed | 0.84 | 0.31 | 0.16 | 7.88 | 0.05s | 0.83 | Level 0.04 | |
| SLIC | 0.89 | 0.22 | 0.10 | 3.75 | 3.54s | 0.88 | Number of SuperPixels 10 | |
| K-means | 0.82 | 0.61 | 0.16 | 4.14 | 2.33s | 0.69 | Number of clusters 10 | |
| Mean shift | 0.74 | 0.36 | 0.12 | 5.01 | 8.34s | 0.73 | Bandwidth 0.10 | |
| JSEG | 0.81 | 0.37 | 0.11 | 18.94 | 69.68s | 0.59 | Color quantization 30 | |
| BSDS500 #81095 | PMLCD | 0.90 | 0.17 | 0.09 | 9.55 | 0.35s | 0.89 | LCD radius 2, 0.21(), 0.12(0.64,0.36) |
| PMVIF | 0.81 | 0.26 | 0.14 | 9.64 | 0.38s | 0.86 | 0.18(), 0.12(0.50,0.50) | |
| Watershed | 0.85 | 0.15 | 0.18 | 10.63 | 0.06s | 0.84 | Level 0.05 | |
| SLIC | 0.85 | 0.20 | 0.11 | 9.99 | 2.50s | 0.86 | Number of SuperPixels 10 | |
| K-means | 0.81 | 0.49 | 0.16 | 8.77 | 2.77s | 0.64 | Number of clusters 14 | |
| Mean shift | 0.82 | 0.50 | 0.14 | 10.41 | 38.64s | 0.63 | Bandwidth 0.08 | |
| JSEG | 0.84 | 0.30 | 0.11 | 16.63 | 47.30s | 0.80 | Color quantization 12 | |
| BSDS500 #107072 | PMLCD | 0.85 | 0.18 | 0.10 | 12.78 | 0.16s | 0.93 | LCD radius 1, 0.22(), -0.05(0.47,0.53) |
| PMVIF | 0.48 | 0.33 | 0.13 | 15.34 | 0.27s | 0.47 | 0.23(), -0.05(0.50,0.50) | |
| Watershed | 0.75 | 0.12 | 0.25 | 15.50 | 0.05s | 0.92 | Level 0.15 | |
| SLIC | 0.76 | 0.12 | 0.16 | 12.27 | 3.89s | 0.88 | Number of SuperPixels 25 | |
| K-means | 0.75 | 0.34 | 0.17 | 12.33 | 3.61s | 0.43 | Number of clusters 20 | |
| Mean shift | 0.74 | 0.32 | 0.27 | 13.58 | 79.77s | 0.41 | Bandwidth 0.02 | |
| JSEG | 0.82 | 0.22 | 0.10 | 8.99 | 47.27s | 0.73 | Color quantization 10 | |
| BSDS500 #238025 | PMLCD | 0.86 | 0.10 | 0.09 | 13.60 | 0.37s | 0.96 | LCD radius 2, 0.19(), 0.15(0.64,0.36) |
| PMVIF | 0.69 | 0.31 | 0.10 | 15.95 | 0.28s | 0.93 | 0.18(), 0.15(0.50,0.50) | |
| Watershed | 0.65 | 0.06 | 0.29 | 19.30 | 0.06s | 0.94 | Level 0.05 | |
| SLIC | 0.67 | 0.08 | 0.17 | 15.49 | 3.73s | 0.95 | Number of SuperPixels 30 | |
| K-means | 0.68 | 0.35 | 0.15 | 12.80 | 2.94s | 0.67 | Number of clusters 16 | |
| Mean shift | 0.71 | 0.47 | 0.12 | 13.41 | 50.11s | 0.61 | Bandwidth 0.05 | |
| JSEG | 0.73 | 0.24 | 0.11 | 15.27 | 42.22s | 0.61 | Color quantization 10 | |
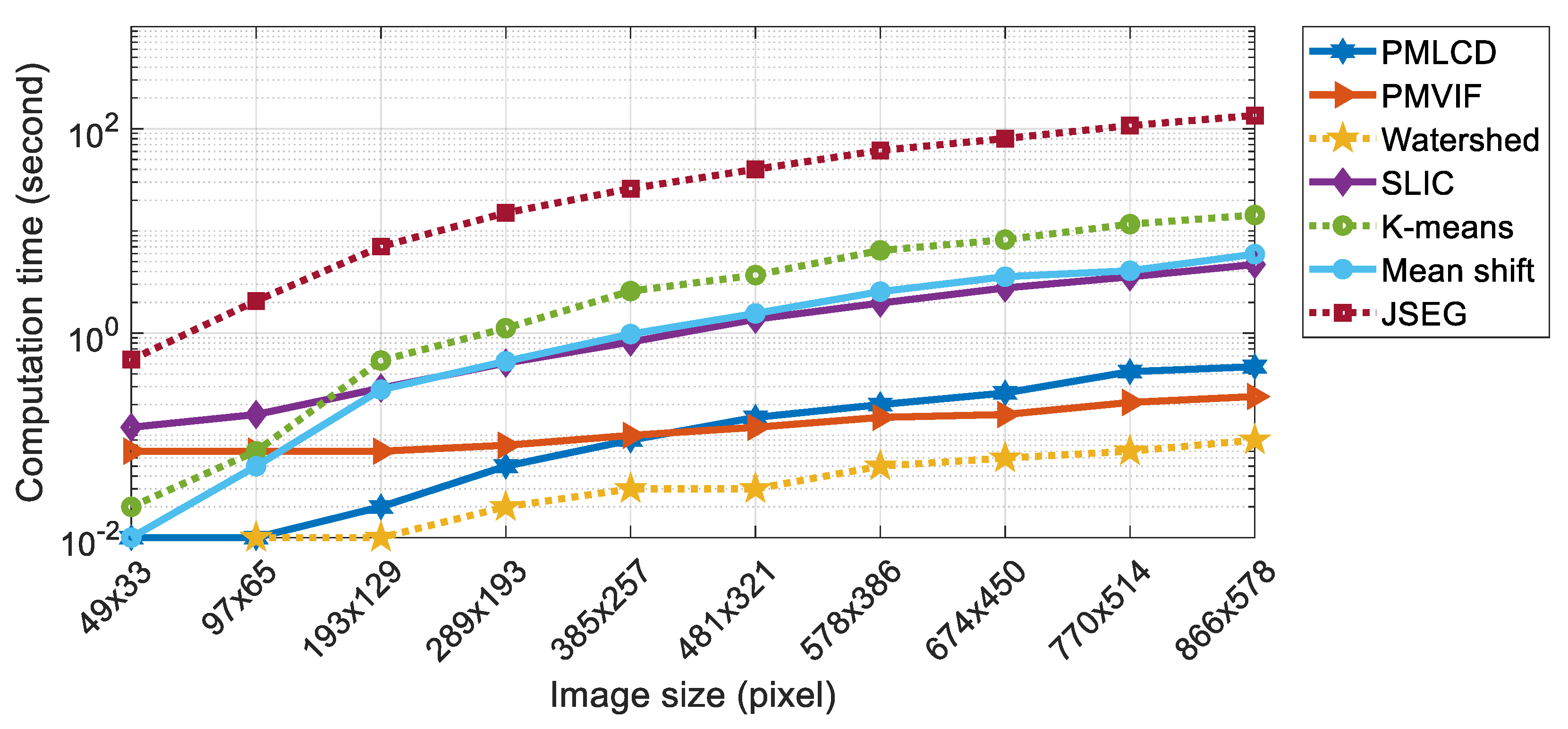
| Average (Standard Deviation) | PMLCD | 0.78 (0.11) | 0.13 (0.05) | 0.12 (0.04) | 12.73 (4.52) | 0.29s (0.10) | 0.93 (0.03) | LCD radius 1.50(0.50), 0.14(0.15) |
| PMVIF | 0.66 (0.10) | 0.26 (0.12) | 0.15 (0.03) | 12.15 (4.98) | 0.47s (0.16) | 0.83 (0.14) | 0.14(0.15) | |
| Watershed | 0.66 (0.15) | 0.13 (0.08) | 0.25 (0.06) | 15.36 (4.03) | 0.06s (0.01) | 0.88 (0.05) | Level 0.0.07(0.04) | |
| SLIC | 0.69 (0.13) | 0.15 (0.04) | 0.16 (0.03) | 11.82 (4.12) | 4.88s (3.11) | 0.87 (0.05) | Number of SuperPixels 18.75(8.93) | |
| K-means | 0.66 (0.14) | 0.38 (0.14) | 0.18 (0.04) | 11.88 (4.05) | 4.90s (3.99) | 0.62 (0.13) | Number of clusters 34.50(38.01) | |
| Mean shift | 0.66 (0.13) | 0.37 (0.10) | 0.18 (0.07) | 13.45 (4.21) | 94.22s (113.90) | 0.60 (0.14) | Bandwidth 0.08(0.07) | |
| JSEG | 0.70 (0.12) | 0.24 (0.07) | 0.12 (0.01) | 16.89 (3.78) | 57.50s (15.60) | 0.75 (0.09) | Color quantization 14.13(8.01) | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phornphatcharaphong, W.; Eua-Anant, N. Edge-Based Color Image Segmentation Using Particle Motion in a Vector Image Field Derived from Local Color Distance Images. J. Imaging 2020, 6, 72. https://doi.org/10.3390/jimaging6070072
Phornphatcharaphong W, Eua-Anant N. Edge-Based Color Image Segmentation Using Particle Motion in a Vector Image Field Derived from Local Color Distance Images. Journal of Imaging. 2020; 6(7):72. https://doi.org/10.3390/jimaging6070072
Chicago/Turabian StylePhornphatcharaphong, Wutthichai, and Nawapak Eua-Anant. 2020. "Edge-Based Color Image Segmentation Using Particle Motion in a Vector Image Field Derived from Local Color Distance Images" Journal of Imaging 6, no. 7: 72. https://doi.org/10.3390/jimaging6070072
APA StylePhornphatcharaphong, W., & Eua-Anant, N. (2020). Edge-Based Color Image Segmentation Using Particle Motion in a Vector Image Field Derived from Local Color Distance Images. Journal of Imaging, 6(7), 72. https://doi.org/10.3390/jimaging6070072