
Domain Adaptation for Medical Image Segmentation: A Meta-Learning Method


Abstract
:1. Introduction
- Unlike existing meta-learning algorithms which limit the capability of learning from diverse task distributions, we studied the feasibility of learning from the diversity of image features which characterizes a specific tissue type while showing diverse signal intensities.
- We propose an algorithm which can nicely learn from diverse segmentation tasks across the entire task distribution. The effectiveness of our algorithm is illustrated by showing consistent improvements in DSC and subjective measures.
2. Related Work
2.1. Convolutional Neural Networks
2.2. Optimization-Based Meta-Learning Methods
3. Methodology
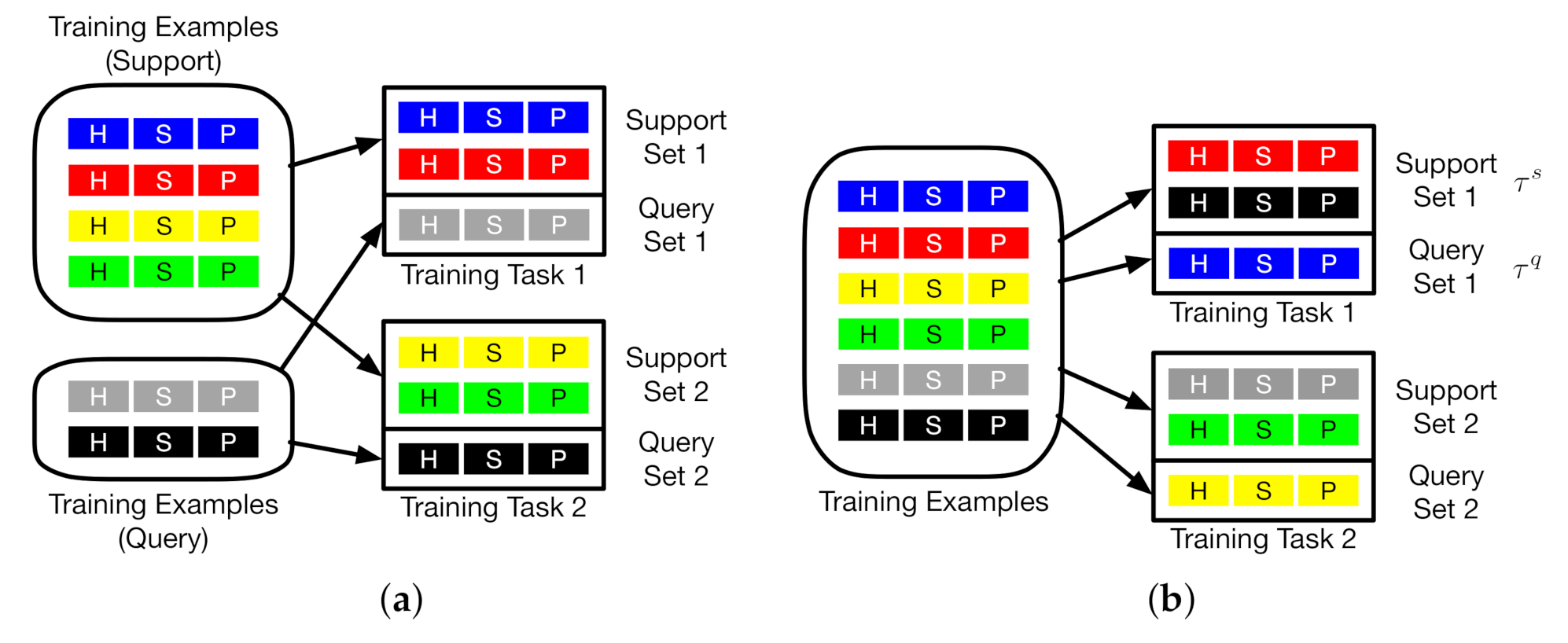
3.1. Meta-Learning Domain Adaptation
| Algorithm 1 Our meta-learning algorithm. |
Require: : distribution over tasks Parameter: , : step size hyperparameters
|
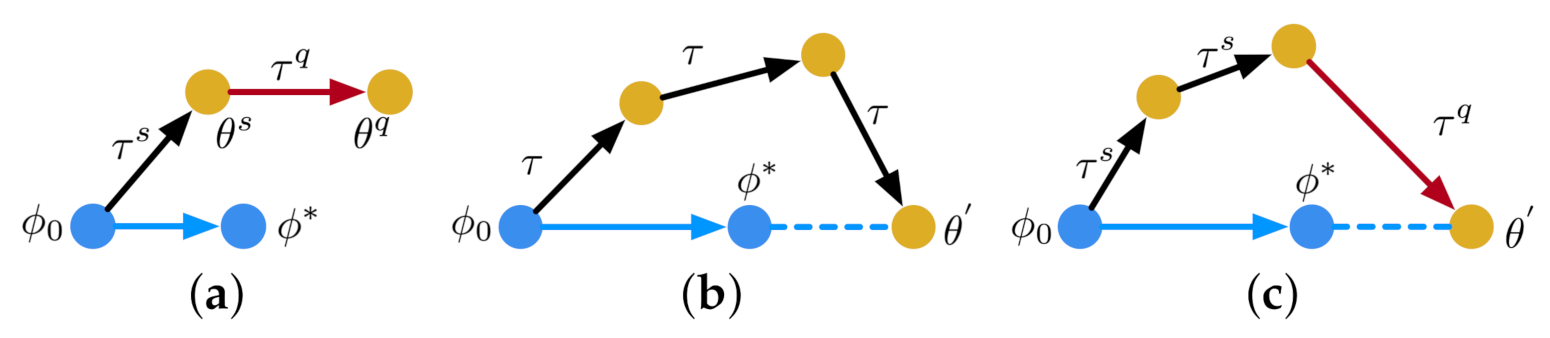
3.2. Algorithm Analysis
4. Experiments
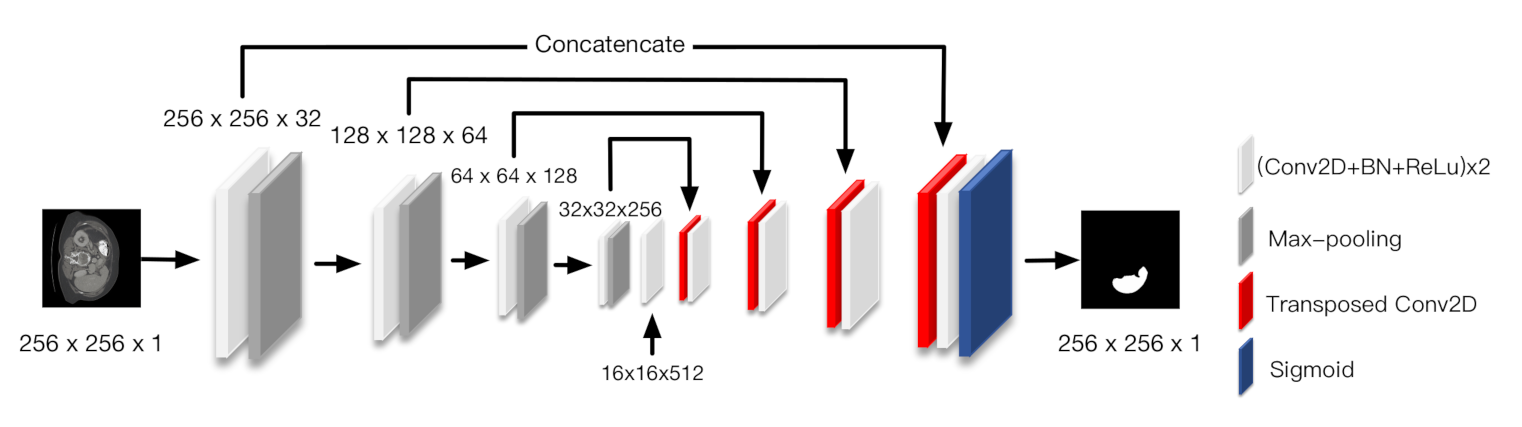
4.1. Dataset and the Baseline Model
4.2. Implementation
4.3. Experimental Results
4.4. An Ablation Study on the Hyper-Parameter
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, H.; Valcarcel, A.M.; Bakshi, R.; Chu, R.; Bagnato, F.; Shinohara, R.T.; Hett, K.; Oguz, I. Multiple Sclerosis Lesion Segmentation with Tiramisu and 2.5 D Stacked Slices. In International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI); Springer: Berlin/Heidelberg, Germany, 2019; pp. 338–346. [Google Scholar]
- Chiu, S.J.; Li, X.T.; Nicholas, P.; Toth, C.A.; Izatt, J.A.; Farsiu, S. Automatic segmentation of seven retinal layers in SDOCT images congruent with expert manual segmentation. Opt. Express 2010, 18, 19413–19428. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, F.; Chen, C.; Wang, Y.; Shi, H.; Cao, Y.; Tu, D.; Zhang, C.; Xu, Y. Learning directional feature maps for cardiac mri segmentation. In International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI); Springer: Berlin/Heidelberg, Germany, 2020; pp. 108–117. [Google Scholar]
- Zhou, Z.; Siddiquee, M.M.R.; Tajbakhsh, N.; Liang, J. Unet++: Redesigning skip connections to exploit multiscale features in image segmentation. IEEE Trans. Med. Imaging 2019, 39, 1856–1867. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dou, Q.; de Castro, D.C.; Kamnitsas, K.; Glocker, B. Domain generalization via model-agnostic learning of semantic features. arXiv 2019, arXiv:1910.13580. [Google Scholar]
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 801–818. [Google Scholar]
- Litjens, G.; Kooi, T.; Bejnordi, B.E.; Setio, A.A.A.; Ciompi, F.; Ghafoorian, M.; Van Der Laak, J.A.; Van Ginneken, B.; Sánchez, C.I. A survey on deep learning in medical image analysis. Med. Image Anal. 2017, 42, 60–88. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Esteva, A.; Kuprel, B.; Novoa, R.A.; Ko, J.; Swetter, S.M.; Blau, H.M.; Thrun, S. Dermatologist-level classification of skin cancer with deep neural networks. Nature 2017, 542, 115. [Google Scholar] [CrossRef] [PubMed]
- Ouyang, C.; Kamnitsas, K.; Biffi, C.; Duan, J.; Rueckert, D. Data efficient unsupervised domain adaptation for cross-modality image segmentation. In International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI); Springer: Berlin/Heidelberg, Germany, 2019; pp. 669–677. [Google Scholar]
- Jiang, X.; Ding, L.; Havaei, M.; Jesson, A.; Matwin, S. Task Adaptive Metric Space for Medium-Shot Medical Image Classification. In International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI); Springer: Berlin/Heidelberg, Germany, 2019; pp. 147–155. [Google Scholar]
- Maicas, G.; Bradley, A.P.; Nascimento, J.C.; Reid, I.; Carneiro, G. Training medical image analysis systems like radiologists. In International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI); Springer: Berlin/Heidelberg, Germany, 2018; pp. 546–554. [Google Scholar]
- Tzeng, E.; Hoffman, J.; Saenko, K.; Darrell, T. Adversarial discriminative domain adaptation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 7167–7176. [Google Scholar]
- Kumar, A.; Saha, A.; Daume, H. Co-regularization based semi-supervised domain adaptation. Adv. Neural Inf. Process. Syst. 2010, 23, 478–486. [Google Scholar]
- Saenko, K.; Kulis, B.; Fritz, M.; Darrell, T. Adapting visual category models to new domains. In European Conference on Computer Vision (ECCV); Springer: Berlin/Heidelberg, Germany, 2010; pp. 213–226. [Google Scholar]
- Roy, A.G.; Siddiqui, S.; Pölsterl, S.; Navab, N.; Wachinger, C. ‘Squeeze & excite’ guided few-shot segmentation of volumetric images. Med. Image Anal. 2020, 59, 101587. [Google Scholar]
- Wang, K.; Liew, J.H.; Zou, Y.; Zhou, D.; Feng, J. Panet: Few-shot image semantic segmentation with prototype alignment. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Seoul, Korea, 27–28 October 2019; pp. 9197–9206. [Google Scholar]
- Rakelly, K.; Shelhamer, E.; Darrell, T.; Efros, A.; Levine, S. Conditional networks for few-shot semantic segmentation. In Proceedings of the 6th International Conference on Learning Representations (ICLR) Workshop, Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- Dong, N.; Xing, E.P. Few-Shot Semantic Segmentation with Prototype Learning. In Proceedings of the BMVC, Newcastle, UK, 3–6 September 2018; Volume 3. [Google Scholar]
- Shaban, A.; Bansal, S.; Liu, Z.; Essa, I.; Boots, B. One-shot learning for semantic segmentation. arXiv 2017, arXiv:1709.03410. [Google Scholar]
- Hospedales, T.; Antoniou, A.; Micaelli, P.; Storkey, A. Meta-learning in neural networks: A survey. arXiv 2020, arXiv:2004.05439. [Google Scholar]
- Andrychowicz, M.; Denil, M.; Gomez, S.; Hoffman, M.W.; Pfau, D.; Schaul, T.; Shillingford, B.; De Freitas, N. Learning to learn by gradient descent by gradient descent. arXiv 2016, arXiv:1606.04474. [Google Scholar]
- Schmidhuber, J. Evolutionary Principles in Self-Referential Learning, or on Learning How to Learn: The Meta-Meta-... Hook. Ph.D. Thesis, Technische Universität München, Munich, Germany, 1987. [Google Scholar]
- Finn, C.; Abbeel, P.; Levine, S. Model-Agnostic Meta-Learning for Fast Adaptation of Deep Networks. In Proceedings of the 34th International Conference on Machine Learning (ICML), JMLR.org, Sydney, Australia, 6–11 August 2017; pp. 1126–1135. [Google Scholar]
- Nichol, A.; Schulman, J. Reptile: A scalable metalearning algorithm. arXiv 2018, arXiv:1803.02999. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Medical Image Computing and Computer-Assisted Intervention (MICCAI); Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A. Inception-v4, inception-resnet and the impact of residual connections on learning. arXiv 2016, arXiv:1602.07261. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Naik, D.K.; Mammone, R.J. Meta-neural networks that learn by learning. In Proceedings of the International Joint Conference on Neural Networks, Baltimore, MD, USA, 7–11 June 1992; IEEE: New York, NY, USA, 1992; Volume 1, pp. 437–442. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| The initial parameter vector | |
| Updated parameter vector (out loop) | |
| Learning rate (inner loop) | |
| Step size (outer loop) | |
| The source training set | |
| Support batch | |
| Query batch | |
| Loss function | |
| f | The parametrized function |
| ∇ | Gradient descent steps |
| Source Domain | Target Domain | Dice Coefficient | Precision | Recall | |||
|---|---|---|---|---|---|---|---|
| Task (s) | Method | Task (s) | Method | ||||
| Null | Null | Colon | SST | - | |||
| Prostate | Pre-training | SST | |||||
| Pancreas | Pre-training | SST | |||||
| Slpeen | Pre-training | SST | |||||
| Multi-source I | Pre-training | SST | |||||
| Layer-freezing | |||||||
| MAML | SST | ||||||
| Layer-freezing | |||||||
| Reptile | SST | ||||||
| Layer-freezing | |||||||
| Our Algorithm | SST | ||||||
| Layer-freezing | |||||||
| Null | Null | Liver | SST | - | |||
| Prostate | Pre-training | SST | |||||
| Heart | Pre-training | SST | |||||
| Slpeen | Pre-training | SST | |||||
| Multi-source II | Pre-training | SST | |||||
| Layer-freezing | |||||||
| MAML | SST | ||||||
| Layer-freezing | |||||||
| Reptile | SST | 0 | |||||
| Layer-freezing | |||||||
| Our Algorithm | SST | ||||||
| Layer-freezing | |||||||
| DSC | Target Domain | Colon | Liver |
|---|---|---|---|
| Depths | |||
| 1 | |||
| 2 | |||
| 3 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, P.; Li, J.; Wang, Y.; Pan, J. Domain Adaptation for Medical Image Segmentation: A Meta-Learning Method. J. Imaging 2021, 7, 31. https://doi.org/10.3390/jimaging7020031
Zhang P, Li J, Wang Y, Pan J. Domain Adaptation for Medical Image Segmentation: A Meta-Learning Method. Journal of Imaging. 2021; 7(2):31. https://doi.org/10.3390/jimaging7020031
Chicago/Turabian StyleZhang, Penghao, Jiayue Li, Yining Wang, and Judong Pan. 2021. "Domain Adaptation for Medical Image Segmentation: A Meta-Learning Method" Journal of Imaging 7, no. 2: 31. https://doi.org/10.3390/jimaging7020031
APA StyleZhang, P., Li, J., Wang, Y., & Pan, J. (2021). Domain Adaptation for Medical Image Segmentation: A Meta-Learning Method. Journal of Imaging, 7(2), 31. https://doi.org/10.3390/jimaging7020031