
Data-Driven Regularization Parameter Selection in Dynamic MRI

 , , ,
, , ,  and
and 
Abstract
:1. Introduction
2. Theory
2.1. Forward Model
2.2. Joint Reconstruction Formulation of the Dynamic Inverse Problem
2.3. Proposed Parameter Selection Methods
2.3.1. Selection of the a Priori Sparsity Estimates
2.3.2. Simultaneous Selection of the Parameters (S-Surface)
- (1)
- Take a grid of regularization parameters and ranging on the interval such thatand
- (2)
- Compute the corresponding estimates . The reconstructions are computed byHere, it is crucial that is selected so small that the reconstructions have a larger temporal TV than the expected temporal sparsity level, and is so small that the reconstructions have a larger spatial TV than the expected spatial sparsity level. Similarly, the values and are selected so large that the problem becomes over-regularized and the respective TV values of the reconstructions are small.
- (3)
- Compute the temporal TV of the image series and the spatial TV of one time frame of the image series for each grid point .
- (4)
- Evaluate the value of the merit functionalfor each grid point.
- (5)
- Select the parameter pair which minimizes .
2.3.3. Sequential Selection of the Parameters (Sequential S-Curve)
- (1)
- Take a sequence of the temporal regularization parameters ranging on the interval such that
- (2)
- Compute the corresponding estimates according toHere too, has to be so small that the problem is under-regularized and the corresponding reconstruction is a noisy image sequence with a temporal TV larger than and is so large that the problem is over-regularized and the temporal TV of the reconstruction is close to zero.
- (3)
- Compute the temporal TV of the recovered estimates .
- (4)
- Fit a smooth interpolation curve to the data and use the interpolated sparsity curve to find the value for which .
- (1)
- Take a sequence of the spatial regularization parameters ranging on the interval such that
- (2)
- Compute the corresponding estimates byAgain, needs to be so small that a frame in the reconstruction results in a spatial TV larger than and needs to be so large that the spatial TV of a frame is very small.
- (3)
- Compute the spatial TV of a frame of the recovered estimates , i.e., .
- (4)
- Fit a smooth interpolation curve to the data , and use the interpolated sparsity curve to find the value for which .
2.4. Comparison Methods
2.4.1. L-Curve Parameter Selection
- (3)
- Set , , where, is either the sum of the spatial total variations of all the frames or the temporal total variation .
- (4)
- Interpolate the L-curve (,) to a dense grid using spline interpolation.
- (5)
- Calculate the maximum curvature point of the L-curve usingwhere is either or .
2.4.2. Monte-Carlo SURE Parameter Selection
- (1)
- Compute the reconstructions (19) with the original data and the perturbed data for parameter pairs with .
- (2)
- Calculate MC-SURE according to (25) and choose the parameter corresponding to the minimum MC-SURE.
- (3)
- Compute the reconstructions (20) with the original data and the perturbed data for parameter pairs with .
- (4)
- Calculate MC-SURE according to (25) and choose the parameter corresponding to the minimum MC-SURE.
3. Test Case Setting
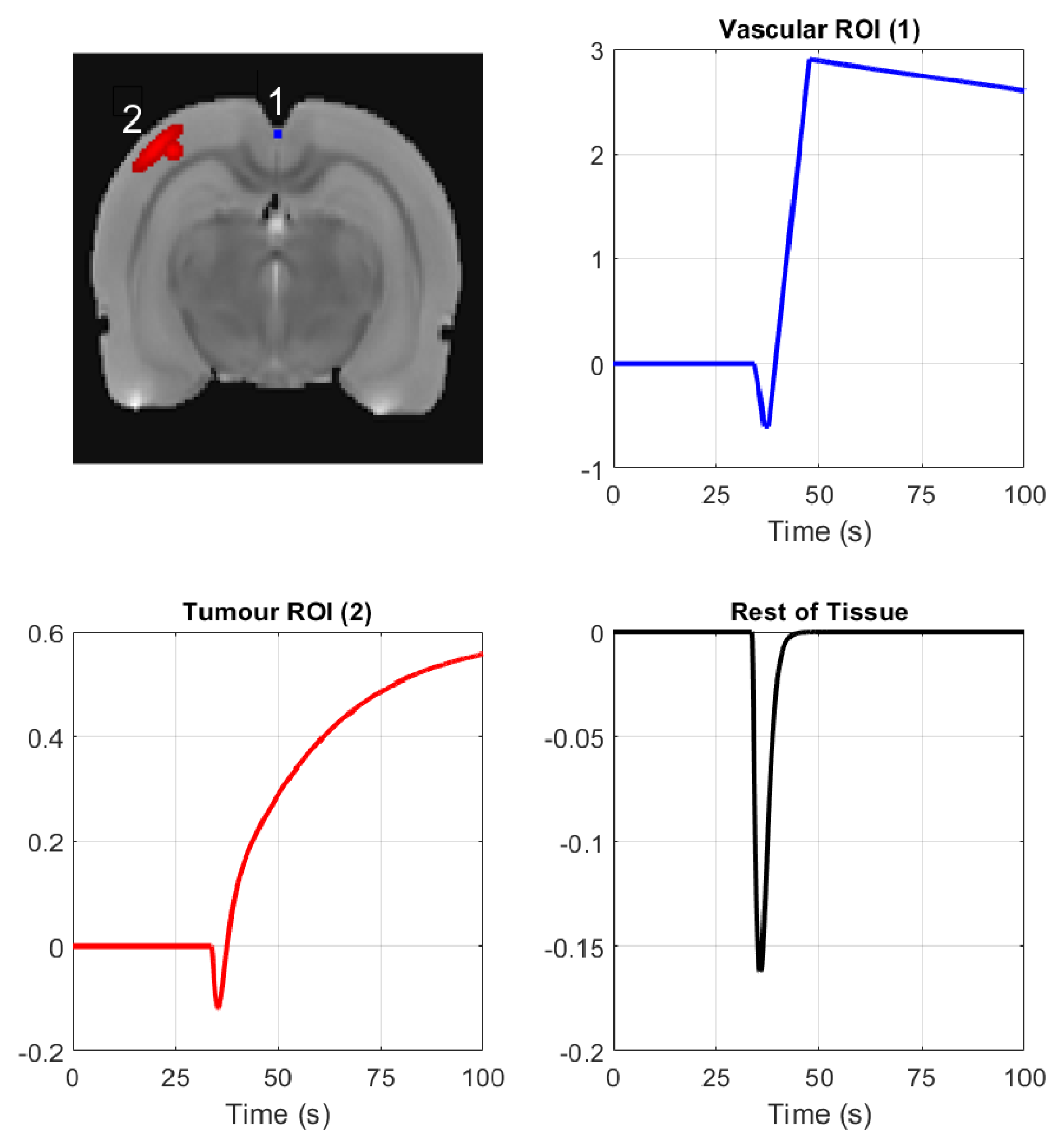
3.1. Simulated Test Case
Error Metric for the Simulation
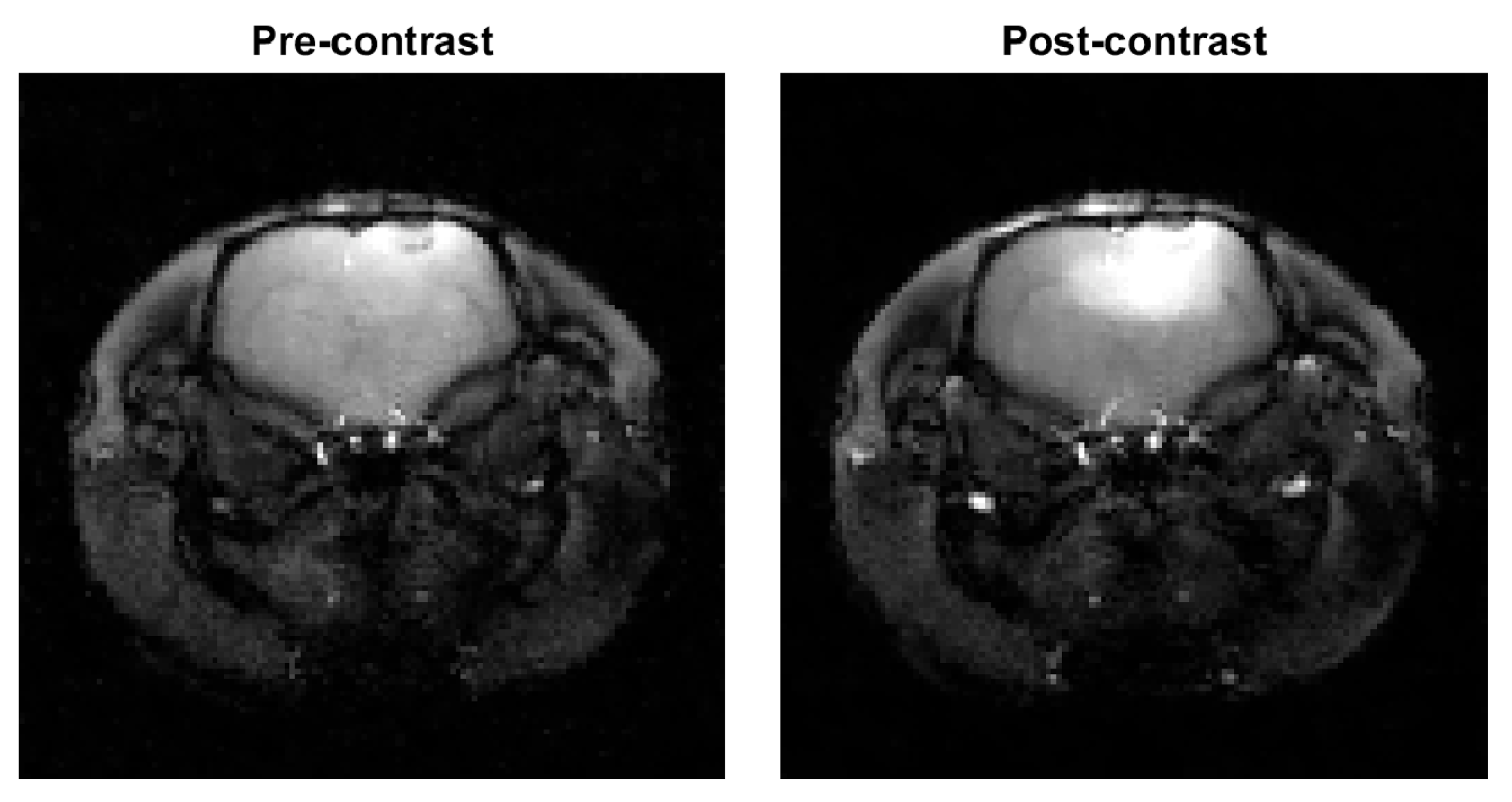
3.2. In Vivo Measurements from a Rat Glioma Model
3.3. Computation
4. Results
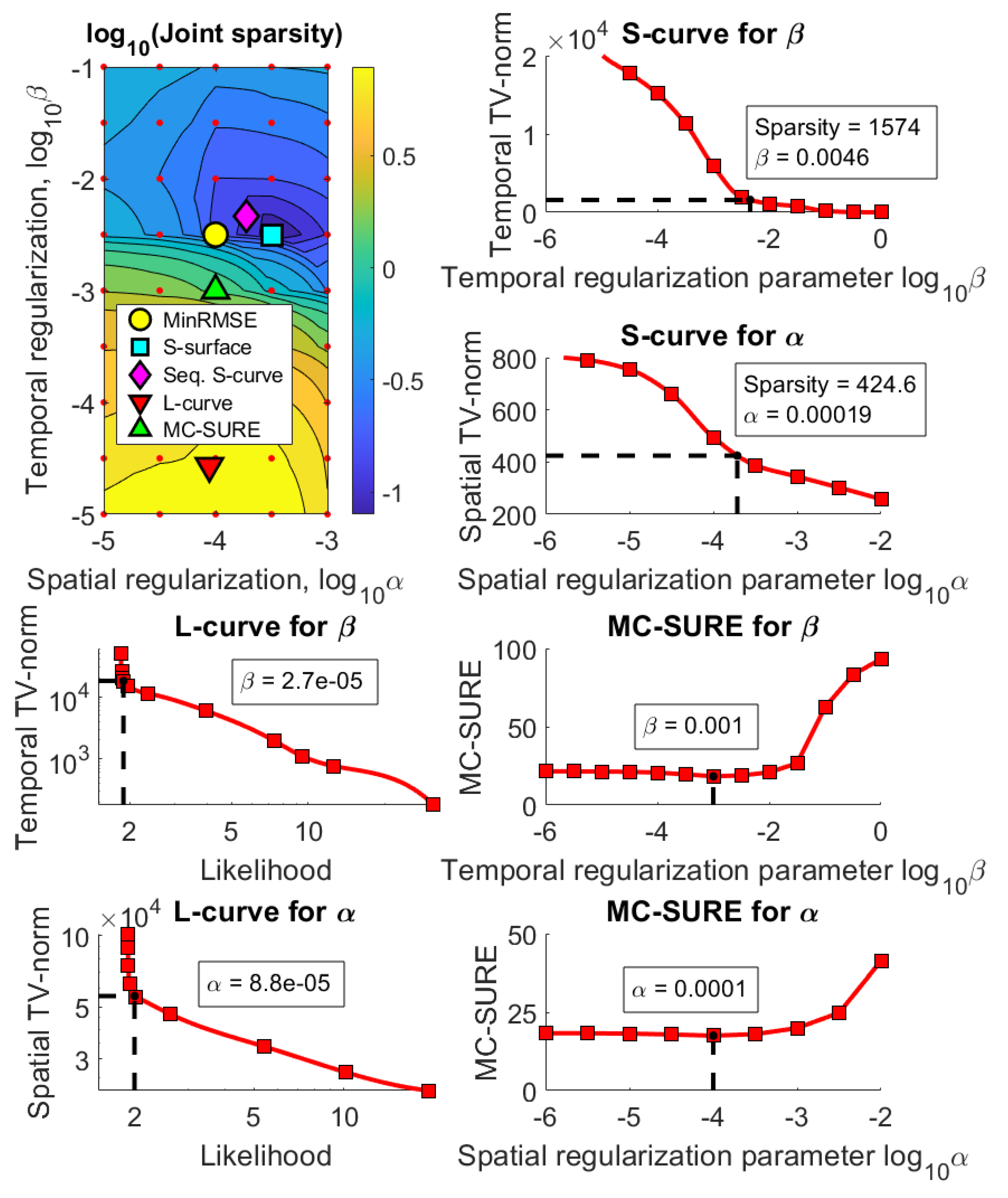
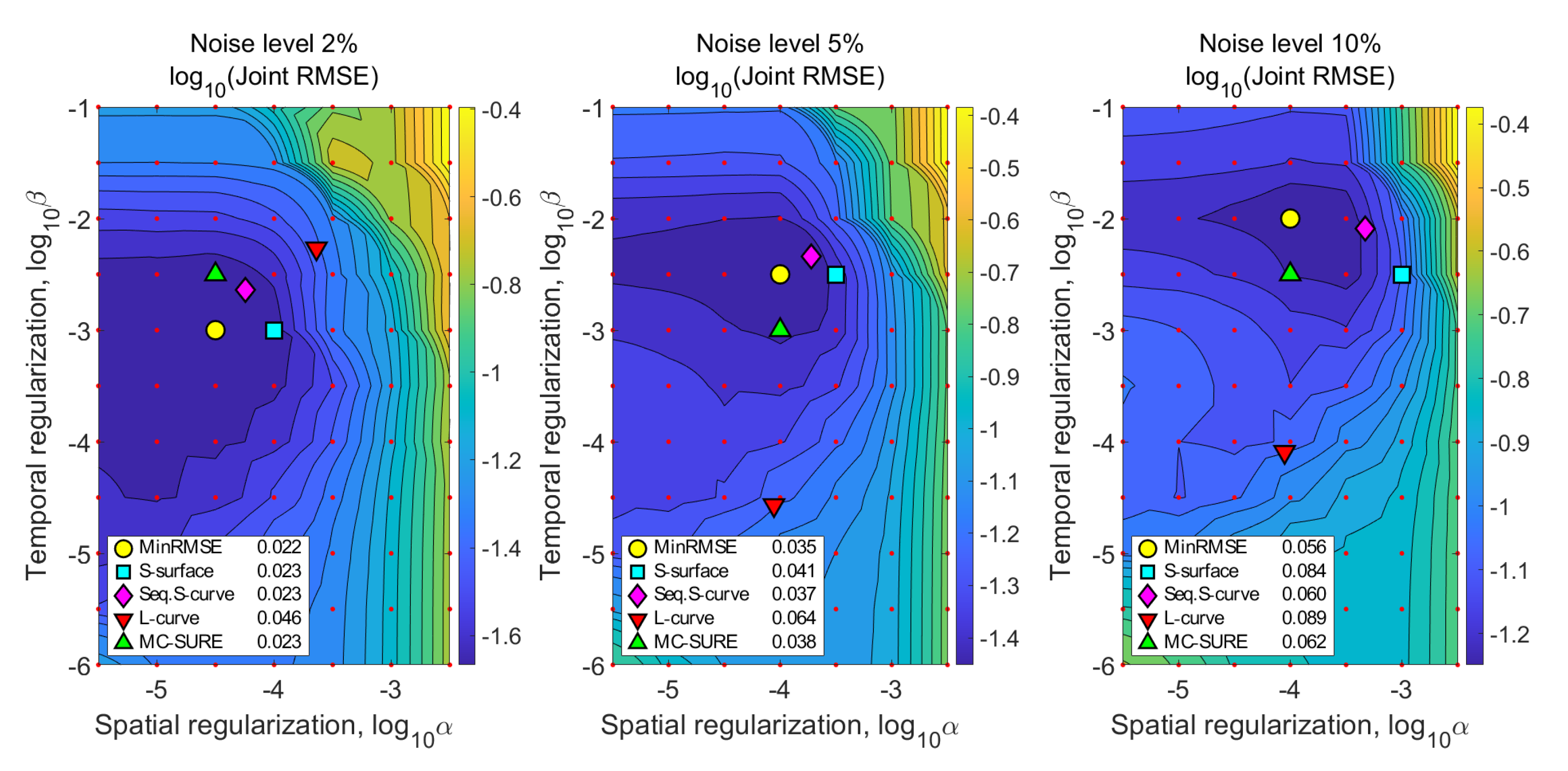
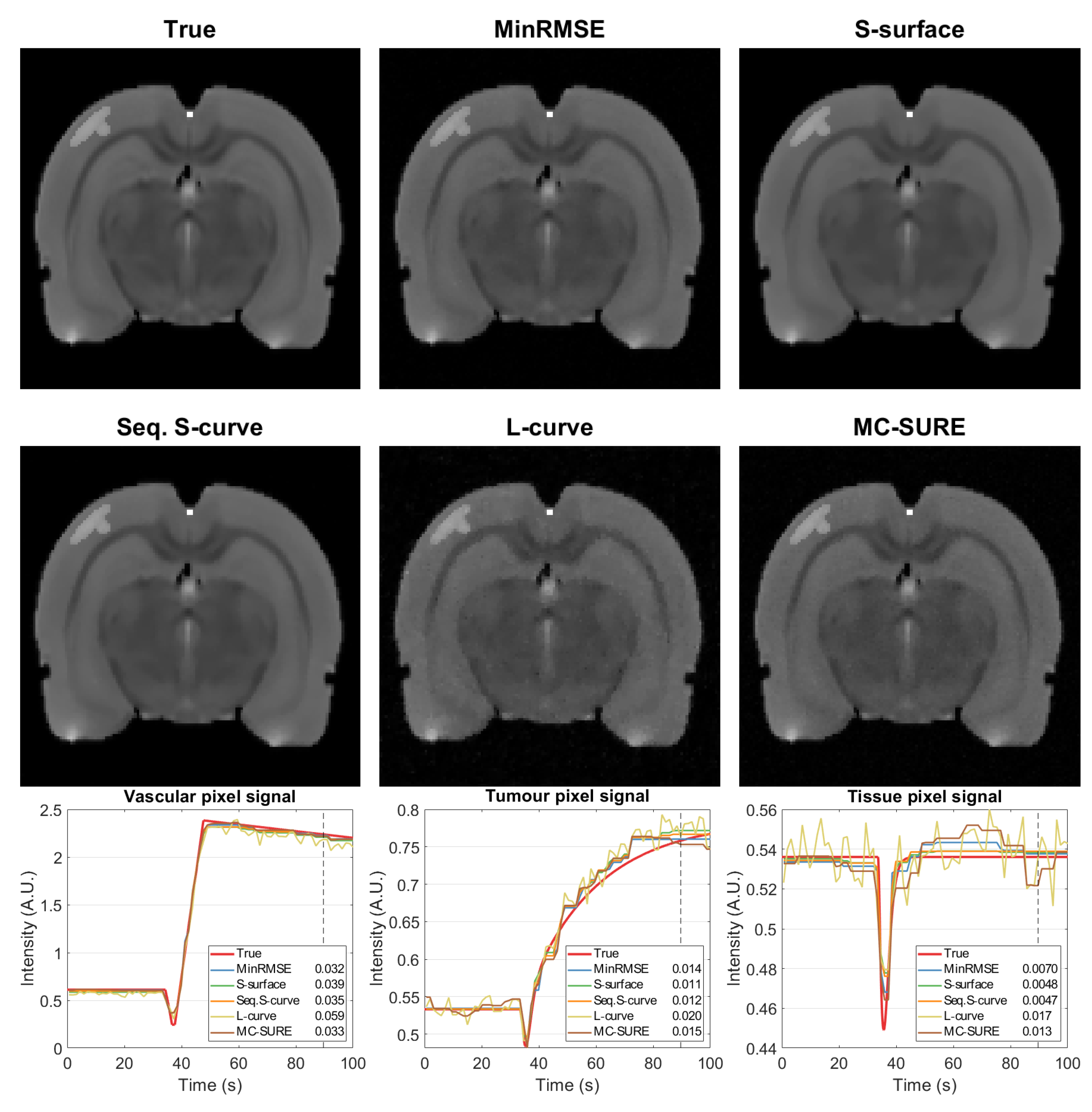
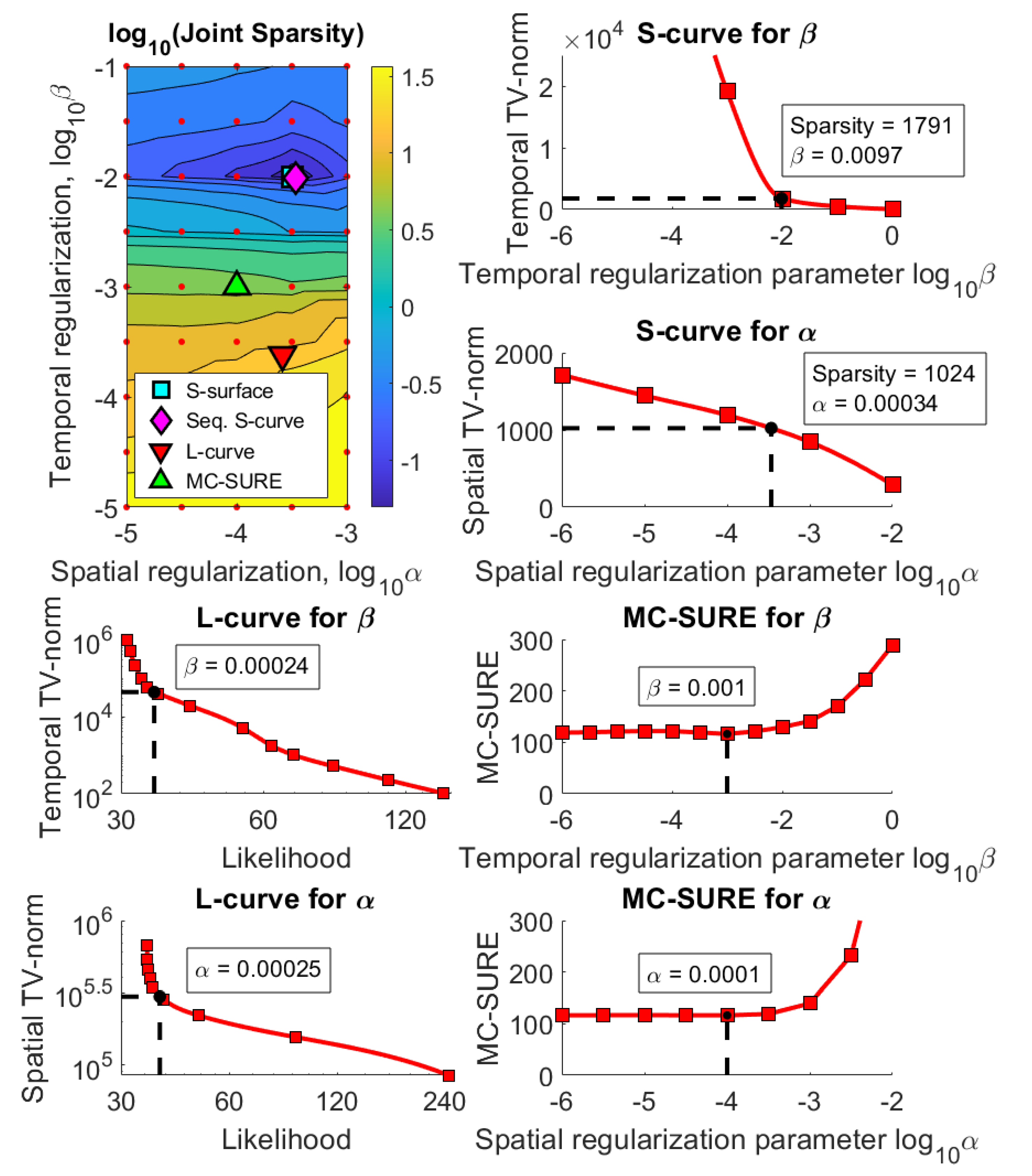
4.1. Simulated Data
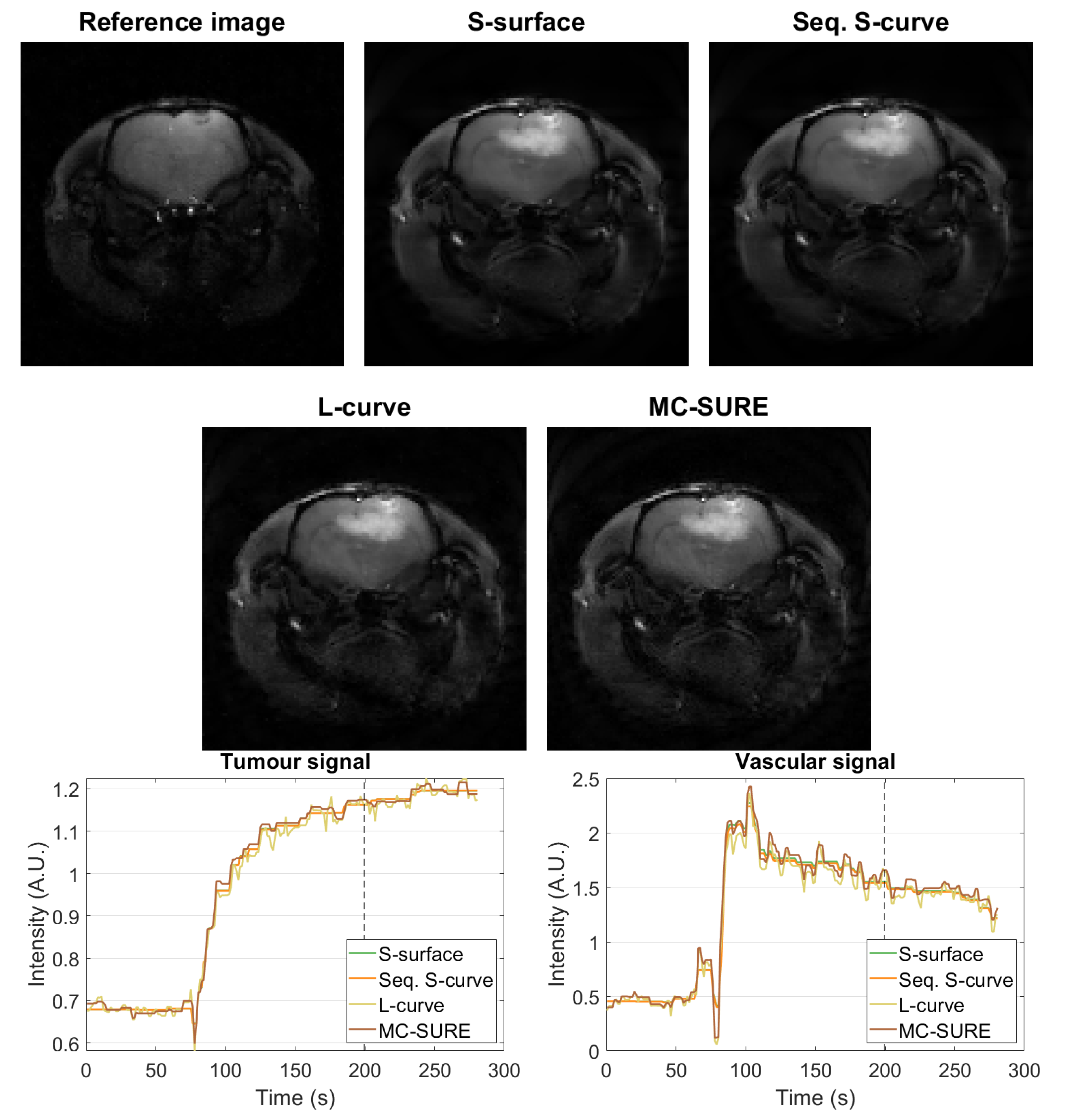
4.2. Experimental Data
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jackson, J.I.; Meyer, C.H.; Nishimura, D.G.; Macovski, A. Selection of a convolution function for Fourier inversion using gridding (computerised tomography application). IEEE Trans. Med. Imaging 1991, 10, 473–478. [Google Scholar] [CrossRef] [Green Version]
- Candes, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef] [Green Version]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Lustig, M.; Donoho, D.; Pauly, J.M. Sparse MRI: The application of compressed sensing for rapid MR imaging. Magn. Reson. Med. 2007, 58, 1182–1195. [Google Scholar] [CrossRef] [PubMed]
- Jaspan, O.N.; Fleysher, R.; Lipton, M.L. Compressed sensing MRI: A review of the clinical literature. Br. J. Radiol. 2015, 88, 1–12. [Google Scholar] [CrossRef]
- Acar, R.; Vogel, C.R. Analysis of bounded variation penalty methods for ill-posed problems. Inverse Probl. 1994, 10, 1217–1229. [Google Scholar] [CrossRef]
- Adluru, G.; McGann, C.; Speier, P.; Kholmovski, E.G.; Shaaban, A.; Dibella, E.V.R. Acquisition and reconstruction of undersampled radial data for myocardial perfusion magnetic resonance imaging. J. Magn. Reson. Imaging 2009, 29, 466–473. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Morozov, V.A. The error principle in the solution of operational equations by the regularization method. USSR Comput. Math. Math. Phys. 1968, 8, 63–87. [Google Scholar] [CrossRef]
- Hansen, P.C.; O’Leary, D.P. The use of the L-curve in the regularization of discrete ill-posed problems. SIAM J. Sci. Comput. 1993, 14, 1487–1503. [Google Scholar] [CrossRef]
- Ramani, S.; Blu, T.; Unser, M. Monte-Carlo Sure: A Black-Box Optimization of Regularization Parameters for General Denoising Algorithms. IEEE Trans. Image Process. 2008, 17, 1540–1554. [Google Scholar] [CrossRef] [Green Version]
- Ramani, S.; Weller, D.S.; Nielsen, J.F.; Fessler, J.A. Non-cartesian MRI reconstruction with automatic regularization via Monte-Carlo SURE. IEEE Trans. Med. Imaging 2013, 32, 1411–1422. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Weller, D.S.; Ramani, S.; Nielsen, J.F.; Fessler, J.A. Monte-Carlo SURE-based parameter selection for parallel magnetic resonance imaging reconstruction. Magn. Reson. Med. 2014, 71, 1760–1770. [Google Scholar] [CrossRef] [Green Version]
- Kolehmainen, V.; Lassas, M.; Niinimäki, K.; Siltanen, S. Sparsity-promoting Bayesian inversion. Inverse Probl. 2012, 28, 025005. [Google Scholar] [CrossRef]
- Hämäläinen, K.; Kallonen, A.; Kolehmainen, V.; Lassas, M.; Niinimäki, K.; Siltanen, S. Sparse tomography. SIAM J. Comput. 2013, 35, B644–B665. [Google Scholar] [CrossRef]
- Niinimäki, K. Computational Optimization Methods for Large-Scale Inverse Problems. Ph.D. Thesis, University of Eastern Finland, Joensuu, Finland, 2013. [Google Scholar]
- Niinimäki, K.; Lassas, M.; Hämäläinen, K.; Kallonen, A.; Kolehmainen, V.; Niemi, E.; Siltanen, S. Multiresolution parameter choice method for total variation regularised tomography. SIAM J. Imaging Sci. 2016, 9, 938–974. [Google Scholar] [CrossRef] [Green Version]
- Niinimäki, K.; Hanhela, M.; Kolehmainen, V. Parameter selection in dynamic contrast-enhanced magnetic resonance tomography. In Centre International de Rencontres Mathématiques; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Martincich, L.; Montemurro, F.; Rosa, G.D.; Marra, V.; Ponzone, R.; Cirillo, S.; Gatti, M.; Biglia, N.; Sarotto, I.; Sismondi, P.; et al. Monitoring response to primary chemotherapy in breast cancer using dynamic contrast-enhanced magnetic resonance imaging. Breast Cancer Res. Treat. 2004, 83, 67–76. [Google Scholar] [CrossRef]
- Pickles, M.; Lowry, M.; Manton, D.; Gibbs, P.; Turnbull, L. Role of dynamic contrast enhanced MRI in monitoring early response of locally advanced breast cancer to neoadjuvant chemotherapy. Breast Cancer Res. Treat. 2005, 91, 1–10. [Google Scholar] [CrossRef]
- Piludu, F.; Marzi, S.; Pace, A.; Villani, V.; Fabi, A.; Carapella, C.; Terrenato, I.; Antenucci, A.; Vidiri, A. Early biomarkers from dynamic contrast-enhanced magnetic resonance imaging to predict the response to antiangiogenic therapy in high-grade gliomas. Neuroradiology 2015, 57, 1269–1280. [Google Scholar] [CrossRef] [PubMed]
- Merali, Z.; Huang, K.; Mikulis, D.; Silver, F.; Kassner, A. Evolution of blood-brain-barrier permeability after acute ischemic stroke. PLoS ONE 2017, 12, e0171558. [Google Scholar] [CrossRef] [Green Version]
- Villringer, K.; Cuesta, B.E.S.; Ostwaldt, A.C.; Grittner, U.; Brunecker, P.; Khalil, A.A.; Schindler, K.; Eisenblätter, O.; Audebert, H.; Fiebach, J.B. DCE-MRI blood–brain barrier assessment in acute ischemic stroke. Neurology 2017, 88, 433–440. [Google Scholar] [CrossRef]
- Fessler, J.A.; Sutton, B.P. Nonuniform fast Fourier transforms using min-max interpolation. IEEE Trans. Signal Process. 2003, 51, 560–574. [Google Scholar] [CrossRef] [Green Version]
- Stein, C.M. Estimation of the Mean of a Multivariate Normal Distribution. Ann. Stat. 1981, 9, 1135–1151. [Google Scholar] [CrossRef]
- Valdés-Hernández, P.A.; Sumiyoshi, A.; Nonaka, H.; Haga, R.; Aubert-Vásquez, E.; Ogawa, T.; Iturria-Medina, Y.; Riera, J.J.; Kawashima, R. An in vivo MRI template set for morphometry, tissue segmentation, and fMRI localization in rats. Front. Neuroinform. 2011, 5, 26. [Google Scholar]
- Lavini, C.; Verhoeff, J.J. Reproducibility of the gadolinium concentration measurements and of the fitting parameters of the vascular input function in the superior sagittal sinus in a patient population. Magn. Reson. Imaging 2010, 28, 1420–1430. [Google Scholar] [CrossRef] [PubMed]
- Tofts, P.S.; Brix, G.; Buckley, D.L.; Evelhoch, J.L.; Henderson, E.; Knopp, M.V.; Larsson, H.B.W.; Lee, T.; Mayr, N.A.; Parker, G.J.M.; et al. Estimating kinetic parameters from dynamic contrast-enhanced T1-weighted MRI of a diffusable tracer: Standardized quantities and symbols. J. Magn. Reson. 1999, 10, 223–232. [Google Scholar] [CrossRef]
- Hanhela, M.; Kettunen, M.; Gröhn, O.; Vauhkonen, M.; Kolehmainen, V. Temporal regularization methods in DCE-MRI. J. Math Imaging Vis. 2020, 62, 1334–1346. [Google Scholar] [CrossRef]
- Rasch, J.; Kolehmainen, V.; Nivajärvi, R.; Kettunen, M.; Gröhn, O.; Burger, M.; Brinkmann, E.M. Dynamic MRI reconstruction from undersampled data with an anatomical prescan. Inverse Probl. 2018, 34, 074001. [Google Scholar] [CrossRef] [Green Version]
- Winkelmann, S.; Schaeffter, T.; Koehler, T.; Eggers, H.; Doessel, O. An optimal radial profile order based on the golden ratio for time-resolved MRI. IEEE Trans. Med. Imaging 2007, 26, 68–76. [Google Scholar] [CrossRef] [PubMed]
- Averbuch, A.; Coifman, R.R.; Donoho, D.L.; Elad, M.; Israeli, M. Fast and accurate Polar Fourier transform. Appl. Comput. Harmon. Anal. 2006, 21, 145–167. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Liu, F.; Li, M.; Jin, J.; Weber, E.; Liu, Q.; Crozier, S. Pseudo-polar Fourier transform based compressed sensing MRI. IEEE Trans. Biomed. Eng. 2016, 64, 816–825. [Google Scholar] [CrossRef]
- Nivajärvi, R.; Olsson, V.; Hyppönen, V.; Bowen, S.; Leinonen, H.M.; Lesch, H.P.; Ardenkjær-Larsen, J.H.; Gröhn, O.H.; Ylä-Herttuala, S.; Kettunen, M.I. Detection of lentiviral suicide gene therapy in C6 rat glioma using hyperpolarised [1-13C]pyruvate. NMR Biomed. 2020, 33, e4250. [Google Scholar] [CrossRef]
- Chambolle, A.; Pock, T. A first-order primal-dual algorithm for convex problems with applications to imaging. J. Math. Imaging Vis. 2011, 40, 120–145. [Google Scholar] [CrossRef] [Green Version]
- Sidky, E.Y.; Jørgensen, J.H.; Pan, X. Convex optimization problem prototyping for image reconstruction in computed tomography with the Chambolle-Pock algorithm. Phys. Med. Biol. 2012, 57, 3065. [Google Scholar] [CrossRef] [PubMed]
- Pock, T.; Chambolle, A. Diagonal preconditioning for first order primal-dual algorithms in convex optimization. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 1762–1769. [Google Scholar]
- Valkonen, T. A primal–dual hybrid gradient method for nonlinear operators with applications to MRI. Inverse Probl. 2014, 30, 55012. [Google Scholar] [CrossRef] [Green Version]
- Vaillant, G.; Prieto, C.; Kolbitsch, C.; Penney, G.; Schaeffter, T. Retrospective Rigid Motion Correction in k-Space for Segmented Radial MRI. IEEE Trans. Med. Imaging 2014, 33, 1–10. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MinRMSE | S-Surface | Seq. S-Curve | L-Curve | MC-SURE | |
|---|---|---|---|---|---|
| 0.0001 | 0.00032 | 0.00019 | 8.8 × | 0.0001 | |
| 0.0032 | 0.0032 | 0.0046 | 2.7 × | 0.001 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hanhela, M.; Gröhn, O.; Kettunen, M.; Niinimäki, K.; Vauhkonen, M.; Kolehmainen, V. Data-Driven Regularization Parameter Selection in Dynamic MRI. J. Imaging 2021, 7, 38. https://doi.org/10.3390/jimaging7020038
Hanhela M, Gröhn O, Kettunen M, Niinimäki K, Vauhkonen M, Kolehmainen V. Data-Driven Regularization Parameter Selection in Dynamic MRI. Journal of Imaging. 2021; 7(2):38. https://doi.org/10.3390/jimaging7020038
Chicago/Turabian StyleHanhela, Matti, Olli Gröhn, Mikko Kettunen, Kati Niinimäki, Marko Vauhkonen, and Ville Kolehmainen. 2021. "Data-Driven Regularization Parameter Selection in Dynamic MRI" Journal of Imaging 7, no. 2: 38. https://doi.org/10.3390/jimaging7020038
APA StyleHanhela, M., Gröhn, O., Kettunen, M., Niinimäki, K., Vauhkonen, M., & Kolehmainen, V. (2021). Data-Driven Regularization Parameter Selection in Dynamic MRI. Journal of Imaging, 7(2), 38. https://doi.org/10.3390/jimaging7020038