Predicting Traffic and Risk Exposure in the Maritime Industry

Abstract
:1. Introduction
2. Materials and Methods
2.1. High Level Description of the Components of the Strategic Planning Tool
2.2. Theoretical Framework for Predictions at the Macro and Micro Level
- is the annual accident probability for vessel i (based on a vessel with ship particulars equal to that of vessel i),
- is the nautical miles travelled during voyage j of vessel i,
- is the expected total nautical miles travelled for vessel i (based on the expected nautical miles travelled for the vessels of this type).
- is the baseline probability for voyage j of ship i having an accident at location s. Spatial differences in risk between areas could be incorporated by:
- is an estimator for the spatial rate ratio at location s.
- represents the traffic density at location s under counterfactual scenario c for ship type k.
- is an estimator of baseline (current) traffic density at location s summed across all ST.
- is an estimator of counterfactual (future) traffic density at location s summed across all ST.
- is an estimator of baseline (current) traffic density at location s for ST equal k.
- is an estimator of the counterfactual (future) traffic density at location s for ST equal k.
3. Results of the Pilot Project
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Logit Models to Estimate Safety Qualities of Vessels

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Type | Use |
|---|---|
| Collisions—very serious and serious | Macro level |
| Powered groundings—very serious and serious | Macro level |
| Drift groundings—very serious and serious | Macro level |
| Drift candidates—irrespective of seriousness | Micro level |
- Ship type, age, and size (GRT) at the time of incident;
- Classification society, flag;
- Country where the vessel was built grouped into four groups, as suggested by AMSA surveyors, and interaction effects with age groups (0–2 and above 14 years represent high age risk, while 3–14 years represent low age risk);
- DoC company and group beneficial owner country of location;
- Number of deficiencies and incidents within 360 days prior to the incident;
- Changes of ship particulars overtime, such as flag changes, ownership changes, DoC company changes, class changes, and class withdrawals (within three years and within five years).
- xiβ is a weighted average of all explanatory variables mentioned before. The probabilities are estimated at the individual ship level (i). The coefficients are estimated by a quasi-maximum likelihood to allow for possible mis-specification of the assumed logistic CDF.
Appendix B. Voyage Database and AIS Data Processing

- port2ee: ship track from port to entry/exit (ee) wayward point on the EEZ boundary
- ee2port: ship track from ee to port
- port2port: ship track from port to port
- port: ship track within port
- ee2ee: ship track from ee to ee, i.e., voyage not tagged as arriving at a port defined on the RouteNet
- Vessels can depart and arrive back into the same port in which case they are classified under category #3.
- Travel for some vessels is restricted exclusively to within the port area. In practice, this did happen with a relatively small proportion of the vessels included in sample data provided by AMSA.
- A port arrival was defined as a vessel staying for at least 12 hours within a 36 nautical radius of a major port.
- Passing through an entry/exit (ee) point was defined as an intersection of a ship track anywhere along the EEZ regional boundary. Note that ee intersections were tagged against major ee positions if the vessel crossed within 90 nautical miles and were otherwise tagged as ZZ.
- When a gap between successive AIS readings was less than 24 hours during which time the effective speed was greater than 75 knots. An error is identified whereby the calculated effective speed in invalid.
- When a gap between successive AIS readings was greater than 48 hours and 500 nautical miles distance. This occurred mostly outside the EEZ region. Tracing of ship track data is reset for a given voyage to avoid introducing potential errors.
- Single anomalies with invalid lat/lon are identified and removed, e.g., the vessel suddenly jumps to an invalid coordinate, but then immediately returns to the original tracking position. Other cases involving the AIS data show inconsistencies throughout most of the ship track data where it is unclear which route the vessel is on as the positions repeatedly change back and forth between two very different locations.
References
- Bijwaard, G.E.; Knapp, S. Analysis of ship life cycles—The impact of economic cycles and ship inspections. Mar. Policy 2009, 33, 350–369. [Google Scholar] [CrossRef]
- Wood, J. Opa 9. Marit. Policy Manag. 1995, 22, 201–208. [Google Scholar] [CrossRef]
- Goulielmos, A.M.; Giziakis, K. Treatment of uncompensated cost of marine accidents in a model of welfare economics. Disaster Prev. Manag. 1998, 7, 183–187. [Google Scholar] [CrossRef]
- Grigalunas, T.A.; Opaluch, J.J. A natural resource damage assessment model for coastal and marine environments. GeoJournal 1988, 16, 315–321. [Google Scholar]
- Grey, C.J. The Cost of Oil Spills from Tankers: An Analysis of IOPC Fund Incidents. In Proceedings of the International Oil Spill Conference, Seattle, WA, USA, 7–12 March 1999; Available online: www.itopf.com/costs.html (accessed on 5 June 2017).
- IMO. Formal Safety Assessment-Consolidated Text of the Guidelines for Formal Safety Assessment for Use in the IMO Rule-Making Process; MSC 83/Inf.2; IMO: London, UK, 14 May 2007. [Google Scholar]
- Hoorn, S.V.; Knapp, S. A multi-layered risk exposure assessment approach for the shipping industry. Transp. Res. Part A Policy Pr. 2015, 78, 21–33. [Google Scholar] [CrossRef] [Green Version]
- Hueffmeier, J.; Berglund, R.; Porthin, M.; Rosqvist, T.; Silvonen, P.; Timonen, M.; Lindberg, U. Dynamic Risk Analysis Tools/Models, WP6-3-01. 2012. Available online: www. efficiensea.org (accessed on 5 June 2017).
- Eide, M.S.; Endresen, Ø.; Breivik, Ø.; Brude, O.W.; Ellingsen, I.H.; Røang, K.; Hauge, J.; Brett, P.O. Prevention of oil spill from shipping by modelling of dynamic risk. Mar. Pollut. Bull. 2007, 54, 1619–1633. [Google Scholar] [CrossRef] [PubMed]
- Det Norske, V. North East Shipping Risk Assessment, Report Prepared for the Australian Maritime Safety Authority, Report Nr 14OFICX-4. 2013.
- BRISK. Project on Sub-Regional Risk of Spill of Oil and Hazardous Substances in the Baltic Sea, Risk Method Note; Danish Admiralty, 2012; Project funded by Danish Admiralty; Available online: http://www.brisk.helcom.fi (accessed on 5 June 2017).
- Hansen, P.H. Working Document, Basic Modelling Principles for Prediction of Collision and Grounding Frequencies; IWRAP II; Technical University of Denmark: Lyngby, Denmark, 2007. [Google Scholar]
- Montewka, J.; Goerlandt, F.; Hanninen, M.; Ylitalo, J.; Seppala, T. Algorithm Development and Documentation, Study of Algorithm Development Using Data Mining, Efficient Sea Project. 2011. Available online: www.efficiensea.org (accessed on 5 June 2017).
- Heij, C.; Knapp, S. Evaluation of safety and environmental risk at individual ship and company level. Transp. Res. Part D Transp. Environ. 2012, 17, 228–236. [Google Scholar] [CrossRef]
- Heij, C.; Bijwaard, G.E.; Knapp, S. Ship inspection strategies: Effects on maritime safety and environmental protection. Transp. Res. Part D Transp. Environ. 2011, 16, 42–48. [Google Scholar] [CrossRef] [Green Version]
- Knapp, S. The Econometrics of Maritime Safety—Recommendations to Improve Safety at Sea. Ph.D. Thesis, Erasmus University Rotterdam, Rotterdam, The Netherland, 2006. [Google Scholar]
- Merrick, J.R.W.; van Dorp, R. Speaking the Truth in Maritime Risk Assessment, Risk Analysis. Risk Anal. 2006, 26, 223–237. [Google Scholar] [CrossRef] [PubMed]
- Goerlandt, F.; Stahlberg, K. Comparative Study of Input Models for Collision Risk Evaluation, WP6-2-04. 2011. Available online: www.efficiensea.org (accessed on 5 June 2017).
- Knapp, S. Integrated Risk Estimation Methodology and Implementation Aspects (Main Report AMSA), Reference Nr. TRIM 2010/860, 2011-1a (Main Report AMSA). 2011.
- IMO. Reports on Marine Casualties and Incidents, Revised Harmonized Reporting PROCEDURES, Adopted 14th December 2000; MSC/Circ. 953, MEPC/Circ. 372; IMO: London, UK, 2000. [Google Scholar]
- Knapp, S.; Heij, C. Evaluation of total risk exposure and insurance premiums in the maritime industry. Transp. Res. Part D Transp. Environ. 2017, 54, 321–334. [Google Scholar] [CrossRef] [Green Version]
- Carey, J.M.; Knapp, S.; Irving, P. Assessing Ecological Sensitivities of Marine Assets to Oil Spill by Means of Expert Knowledge. 2014. Available online: http://repub.eur.nl/pub/51749 (accessed on 5 June 2017).
- Buhaug, Ø.; Corbett, J.J.; Endresen, Ø.; Eyring, V.; Faber, J.; Hanayama, S.; Lee, D.S.; Lee, D.; Lindstad, H.; Markowska, A.Z.; et al. Second IMO GHG Study 2009; International Maritime Organization (IMO): London, UK, April 2009. [Google Scholar]
- Hayes, K.R. Uncertainty and Uncertainty Analysis Methods; ACERA Report Number: EP102467; Australian Centre of Excellence for Risk Analysis: Melbourne, Australia, 2011. [Google Scholar]
- Pidgeon, N.; Hood, C.; Jones, C.; Turner, B.; Gibson, R. Risk Perception, Risk Analysis, Perception and Management; Report of the Royal Society Study Group; The Royal Society: London, UK, 1992. [Google Scholar]
- Rohrmann, B. Ris perception of different societal groups: Australian findings and cross-national comparisons. Aust. J. Psychol. 1994, 46, 150–163. [Google Scholar] [CrossRef]
- Kahneman, D.; Tversky, A. Choices, values, and frames. Am. Psychol. 1984, 39, 341–350. [Google Scholar] [CrossRef]
- Fischoff, B.; Slovia, P.; Lichtenstein, S. Knowning with certainty: The appropriateness of extreme confidence. J. Exp. Psychol. Hum. Percept. Perform. 1977, 3, 552–564. [Google Scholar] [CrossRef]



| Data | Time Frame | Use of Data |
|---|---|---|
| Vessel positions Source: 5-minute down-sampled AIS data from AMSA | 01/01/2014 to 31/12/2014, pre-formatted, cleaned data, linked with ship specific incident type probabilities | Risk estimation routine Calibration factors |
| Global INCIDENT data Source: AMSA, IHS, IMO, LLIS | 01/01/2006 to 31/12/2010 19,740 observations, data compiled based on four sources | Logit models Model validation |
| Regional incident data Source: AMSA | 02/01/1995 to 01/06/2013, 14,428 observations (pre-formatted, cleaned data) | Model validation |
| World fleet data at SHIP level Source: IHS-Markit | 2006 to 2010 and 2012 | Logit models Ship type classifications Calibration factors |
| Nautical miles TRAVELLED Source: IMO, LLIS | 2007, 2013 | Calibration factors |
| Arrival forecasts Source: AMSA Based on a Study from Bramer Seascope | Number of arrivals by ship type for 2020 to 2025 for all major ports in Australia | Input data into the traffic density projections and associated risk exposure estimates |
| Results by Year | Incident Type (Very Serious and Serious) | ||||
|---|---|---|---|---|---|
| Collisions | Powered Groundings | Drift Groundings | Total | ||
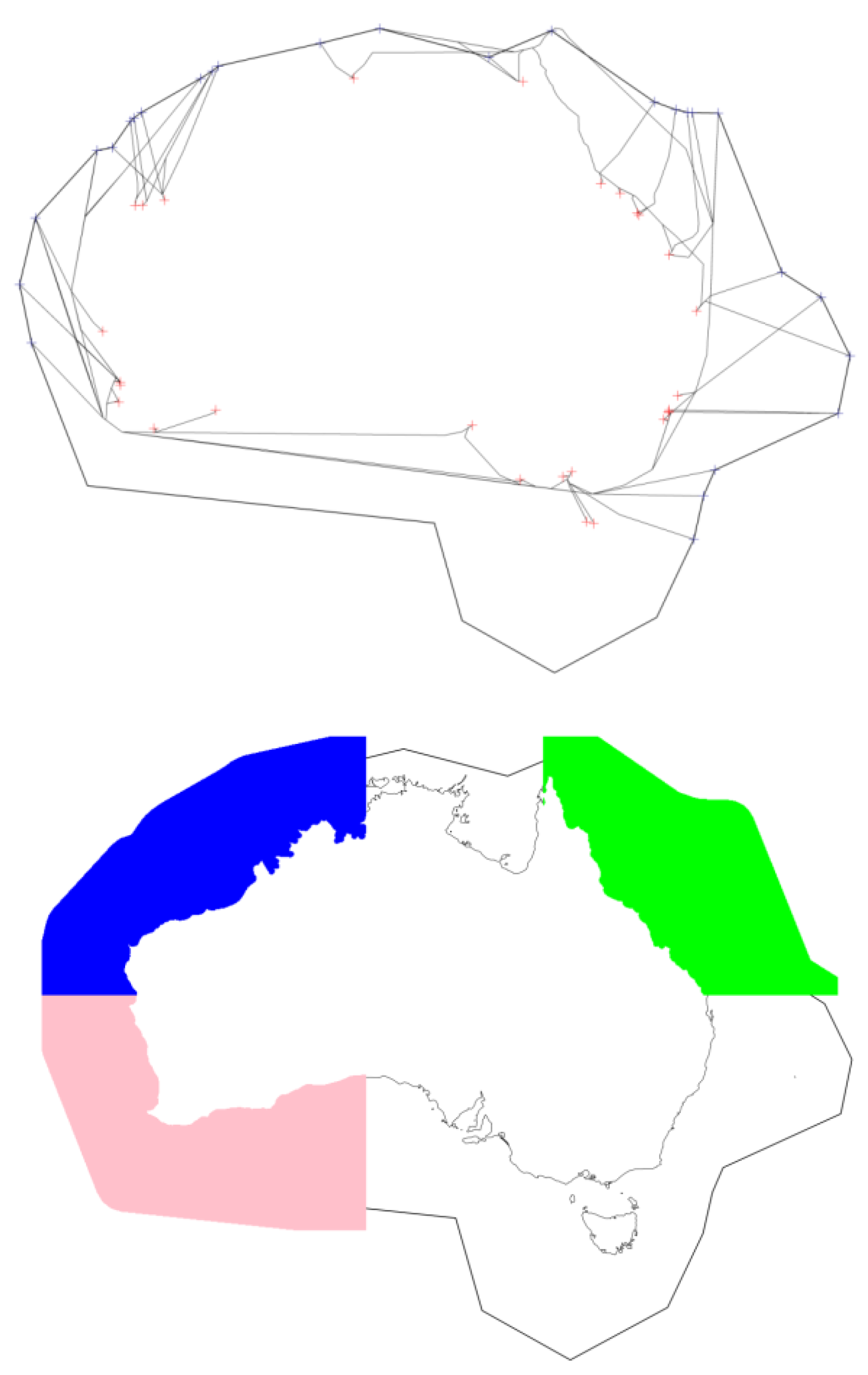
| North West (NW) | 2011 | 0.50 | 0.64 | 0.97 | 2.10 |
| 2014 | 0.70 | 0.74 | 1.10 | 2.55 | |
| 2020 | 1.04 | 0.91 | 1.39 | 3.34 | |
| 2025 | 1.04 | 0.92 | 1.41 | 3.37 | |
| South West (SW) | 2011 | 0.37 | 0.35 | 0.56 | 1.28 |
| 2014 | 0.42 | 0.34 | 0.51 | 1.28 | |
| 2020 | 0.82 | 0.53 | 0.91 | 2.26 | |
| 2025 | 0.86 | 0.55 | 0.95 | 2.37 | |
| Australian EEZ | 2011 | 2.69 | 2.62 | 4.17 | 9.47 |
| 2014 | 3.31 | 3.01 | 4.87 | 11.20 | |
| 2020 | 5.31 | 3.87 | 6.47 | 15.64 | |
| 2025 | 5.73 | 4.05 | 6.90 | 16.69 | |
| GBR (no RCO’s) | 2011 | 0.66 | 0.64 | 0.96 | 2.26 |
| 2014 | 0.85 | 0.74 | 1.16 | 2.75 | |
| 2020 | 1.54 | 0.99 | 1.53 | 4.06 | |
| 2025 | 1.84 | 1.08 | 1.69 | 4.61 | |
| GBR (with RCO’s) | 2011 | 0.41 | 0.34 | 0.63 | 1.38 |
| 2014 | 0.52 | 0.39 | 0.76 | 1.68 | |
| 2020 | 0.90 | 0.51 | 0.98 | 2.39 | |
| 2025 | 1.08 | 0.56 | 1.09 | 2.72 | |
| Observed (with all RCO’s) | 1.80 | 2.00 | 4.60 | 8.40 | |
| Expected (base case scenario) | 3.31 | 3.01 | 4.87 | 11.20 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vander Hoorn, S.; Knapp, S. Predicting Traffic and Risk Exposure in the Maritime Industry. Safety 2019, 5, 42. https://doi.org/10.3390/safety5030042
Vander Hoorn S, Knapp S. Predicting Traffic and Risk Exposure in the Maritime Industry. Safety. 2019; 5(3):42. https://doi.org/10.3390/safety5030042
Chicago/Turabian StyleVander Hoorn, Stephen, and Sabine Knapp. 2019. "Predicting Traffic and Risk Exposure in the Maritime Industry" Safety 5, no. 3: 42. https://doi.org/10.3390/safety5030042
APA StyleVander Hoorn, S., & Knapp, S. (2019). Predicting Traffic and Risk Exposure in the Maritime Industry. Safety, 5(3), 42. https://doi.org/10.3390/safety5030042