Biomimicry of the Hawk Moth, Manduca sexta (L.), Produces an Improved Flapping-Wing Mechanism


Abstract
:1. Introduction
1.1. Flapping-Wing MAVs, Systems, and Mechanisms
1.2. Efficiency as a Performance Metric
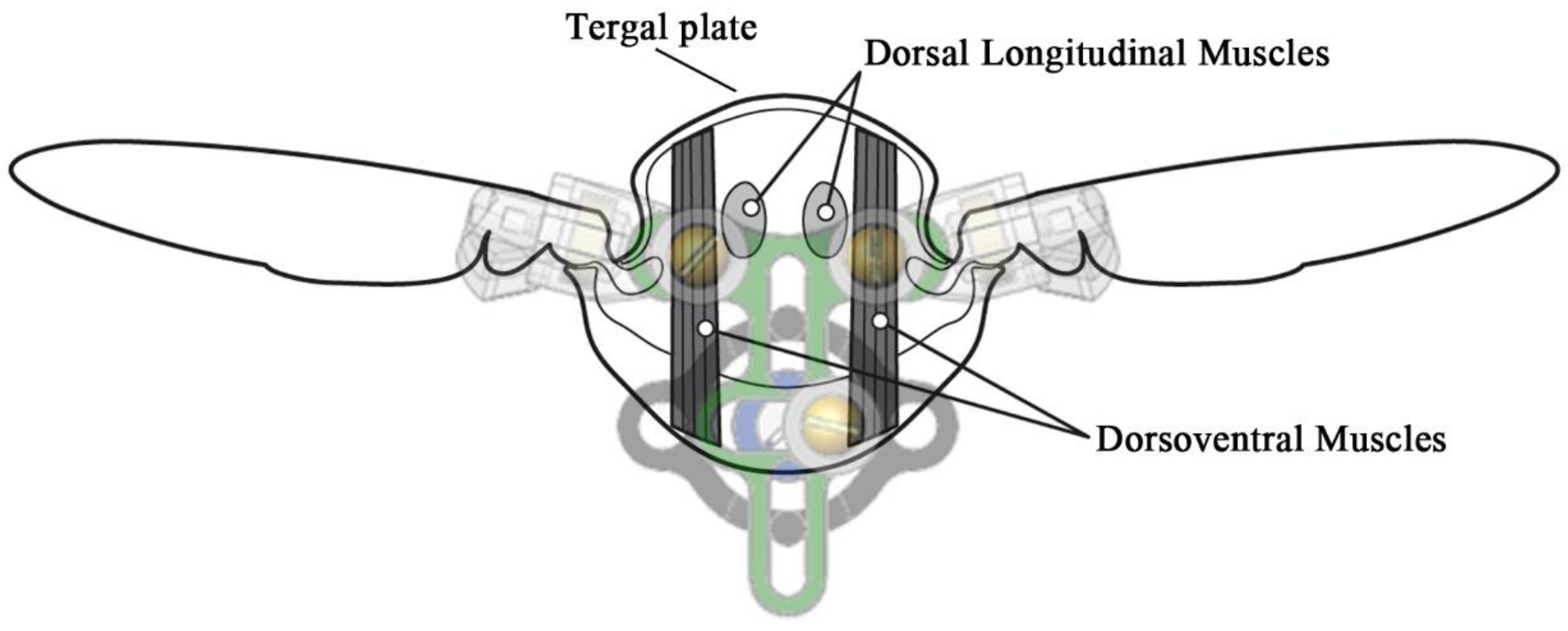
1.3. The Hawk Moth Manduca Sexta
2. Methods
2.1. Flapping-Wing Mechanism 2.1 Development Methods
2.2. Flapping-Wing Mechanism Efficiency Measurement Methods
2.3. Experimental Methods
2.3.1. System Load Comparison
2.3.2. System Lift Production
3. Results
3.1. Flapping-Wing Mechanism 2.1
3.2. Motor Load Calibration and Efficiency
3.3. System Load Comparison
3.4. System Lift Production
4. Discussion
4.1. Measurement Hardware and Procedures
4.2. Experiment Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Hardware Configuration Details
Appendix A.1. Hardware Component List

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part Name | Manufacturer | Part Number | Website/URL |
|---|---|---|---|
| Tiva™ C Series TM4C123G LaunchPad Microcontroller | Texas Instruments | EK-TM4C123GXL | http://www.ti.com/tool/EK-TM4C123GXL |
| Tattu LiPo Battery Pack 1300mAh 45C 3S 11.1V | Tattu | TA-45C-1300-3S-XT60 | https://www.genstattu.com/tattu-1300mah-45c-3s1p-lipo-battery-pack-with-xt60-plug.html |
| eBoot LM2596 DC to DC Buck Converter | eBoot/Texas Instruments | LM2596S-ADJ | https://www.ti.com/product/LM2596 |
| DRV8838 Single Brushed DC Motor Driver Carrier | Pololu/Texas Instruments | 2990 | https://www.pololu.com/product/2990 |
| INA169 Analog DC Current Sensor Breakout | Adafruit/Texas Instruments | 1164 | https://www.adafruit.com/product/1164 |
| AS5147P Position Sensor Adapter Board | AMS | AS5147P | https://ams.com/as5147padapterboard |
| Phidgets Micro Load Cell (0–100 g)—CZL639HD | Phidgets | 3139_0 | https://www.phidgets.com/?prodid=230 |
| Protocentral ADS1262 32-bit Precision ADC Breakout Board | Protocentral/Texas Instruments | PC-4143 | http://www.ti.com/lit/ds/symlink/ads1262.pdf |
Appendix A.2. Motor Power and Control
Appendix A.3. Power Measurement
Appendix A.4. Position and Flapping Frequency Sensing
Appendix A.5. Measuring Lift Production

Appendix B. Motor Load Calibration and Efficiency


References
- McMichael, J.M.; Francis, M.S. Micro Air Vehicles-Toward a New Dimension in Flight. Fed. Am. Sci. 1997. [Google Scholar]
- Deng, S.; Percin, M.; van Oudheusden, B.; Remes, B.; Bijl, H. Experimental investigation on the aerodynamics of a bio-inspired flexible flapping wing micro air vehicle. Int. J. Micro Air Veh. 2014, 6, 105–115. [Google Scholar] [CrossRef] [Green Version]
- Sahai, R.; Galloway, K.C.; Karpelson, M.; Wood, R.J. A flapping-wing micro air vehicle with interchangeable parts for system integration studies. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 501–506. [Google Scholar]
- Sahai, R.; Galloway, K.C.; Wood, R.J. Elastic element integration for improved flapping-wing micro air vehicle performance. IEEE Trans. Robot. 2013, 29, 32–41. [Google Scholar] [CrossRef]
- Leys, F.; Vandepitte, D.; Reynaerts, D. Design of a flapping wing micro air vehicle, based on the Rufous Hummingbird. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; pp. 1266–1271. [Google Scholar]
- Keennon, M.; Klingebiel, K.; Won, H. Development of the nano hummingbird: A tailless flapping Wing Micro Air Vehicle. In Proceedings of the 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012. [Google Scholar]
- Khan, Z.A.; Agrawal, S.K. Study of biologically inspired flapping mechanism for micro air vehicles. AIAA J. 2011, 49, 1354–1365. [Google Scholar] [CrossRef]
- Yang, W.; Wang, L.; Song, B. Dove: A biomimetic flapping-wing micro air vehicle. Int. J. Micro Air Veh. 2018, 10, 70–84. [Google Scholar] [CrossRef]
- İşbitirici, A.; Altuğ, E. Design of a flapping-wing aerial vehicle based on four-bar mechanism. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems, ICUAS 2016, Arlington, VA, USA, 7–10 June 2016; pp. 1240–1245. [Google Scholar]
- Nguyen, Q.V.; Truong, Q.T.; Park, H.C.; Goo, N.S.; Byun, D. A motor-driven flapping-wing system mimicking beetle flight. In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 1087–1092. [Google Scholar]
- Moses, K.C.; Michaels, S.C.; Willis, M.; Quinn, R.D. Artificial Manduca sexta forewings for flapping-wing micro aerial vehicles: How wing structure affects performance. Bioinspir. Biomim. 2017, 12, 055003. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Lentink, D. Fruit fly scale robots can hover longer with flapping wings than with spinning wings. J. R. Soc. Interface 2016, 13, 20160730. [Google Scholar] [CrossRef]
- Karpelson, M.; Wei, G.Y.; Wood, R.J. A review of actuation and power electronics options for flapping-wing robotic insects. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 779–786. [Google Scholar]
- Chen, C.; Zhang, T. A review of design and fabrication of the bionic flapping wing micro air vehicles. Micromachines 2019, 10, 144. [Google Scholar] [CrossRef] [Green Version]
- Cranston, B.; Palazotto, A. Evaluation of the thorax of manduca sexta for flapping wing micro air vehicle applications. Int. J. Micro Air Veh. 2014, 6, 191–210. [Google Scholar] [CrossRef]
- Hedrick, T.L.; Daniel, T.L. Flight control in the hawkmoth Manduca sexta: The inverse problem of hovering. J. Exp. Biol. 2006, 209, 3114–3130. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Goyret, J.; Raguso, R.A. The role of mechanosensory input in flower handling efficiency and learning by Manduca sexta. J. Exp. Biol. 2006, 209, 1585–1593. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Willmott, A.P.; Ellington, C.P. The mechanics of flight in the hawkmoth Manduca sexta I. Kinematics of Hovering and Forward Flight. J. Exp. Biol. 1997, 200 Pt 21, 2705–2722. [Google Scholar]
- Cheng, B.; Deng, X.; Hedrick, T.L. The mechanics and control of pitching manoeuvres in a freely flying hawkmoth (Manduca sexta). J. Exp. Biol. 2011, 214, 4092–4106. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hollenbeck, A.C.; Palazotto, A.N. Methods Used to evaluate the hawkmoth (Manduca sexta) as a flapping-wing micro air vehicle. Int. J. Micro Air Veh. 2012, 4, 119–132. [Google Scholar] [CrossRef] [Green Version]
- Hollenbeck, A.C.; Palazotto, A.N. Mechanical Characterization of Flight Mechanism in the Hawkmoth Manduca sexta. Exp. Mech. 2013, 53, 1189–1199. [Google Scholar] [CrossRef]
- Cranston, B.C. Evaluation of the Thorax of the Manduca Sexta for Flapping Wing Micro Air Vehicle Applications; Air Force Institute of Technology: Wright Patterson Air Force Base, OH, USA, 2012. [Google Scholar]
- Hedenström, A. How Insect Flight Steering Muscles Work. PLoS Biol. 2014, 12, e1001822. [Google Scholar] [CrossRef]
- Nakata, T.; Liu, H. Aerodynamic performance of a hovering hawkmoth with flexible wings: A computational approach. Proc. R. Soc. B Biol. Sci. 2012, 279, 722–731. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, L.; Deng, X. Power distribution in the hovering flight of the hawk moth Manduca sexta. Bioinspir. Biomim. 2009, 4, 046003. [Google Scholar] [CrossRef] [Green Version]
- Moses, K.C.; Michaels, N.I.; Hauerwas, J.; Willis, M.; Quinn, R.D. An insect-scale bioinspired flapping-wing-mechanism for micro aerial vehicle development. In Lecture Notes in Computer Science (including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer International Publishing: Cham, Switzerland, 2017; pp. 589–594. [Google Scholar]
- Moses, K.C.; Prigg, D.; Weisfeld, M.; Bachmann, R.J.; Willis, M.; Quinn, R.D. Simulating Flapping Wing Mechanisms Inspired by the Manduca sexta Hawkmoth. In Biomimetic and Biohybrid Systems; Springer International Publishing: Cham, Switzerland, 2018; pp. 326–337. [Google Scholar]
- O’Hara, R.P.; Palazotto, A.N. The morphological characterization of the forewing of the Manduca sexta species for the application of biomimetic flapping wing micro air vehicles. Bioinspir. Biomim. 2012, 7, 46011. [Google Scholar] [CrossRef]
- Lau, G.K.; Chin, Y.W.; Goh JT, W.; Wood, R.J. Dipteran-insect-inspired thoracic mechanism with nonlinear stiffness to save inertial power of flapping-wing flight. IEEE Trans. Robot. 2014, 30, 1187–1197. [Google Scholar] [CrossRef]
- Moore, M.N.J. Torsional spring is the optimal flexibility arrangement for thrust production of a flapping wing. Phys. Fluids 2015, 27, 091701. [Google Scholar] [CrossRef] [Green Version]









| Sampling Rate (μs) | Frequency (Hz) | Event Type | Device | Comm. Protocol |
|---|---|---|---|---|
| 20 | 50,000 | Power (V × I) | 2 × 12-bit Onboard ADC a | Analog |
| 50 | 20,000 | Pulse Width Modulated Signal | Tiva C PWM Module | PWM |
| 139 | 7200 | Load Cell Acquisition | Protocentral 32-bit ADC | SPI |
| 1000 | 1000 | Motor Position | AMS AS5147P Position Sensor | ABI |
| 40,000 | 25 | Wing Beat | Flapping Wing Mechanism | USB |
| 100,000 | 1 | Sample Size | Tiva C Flash Memory | USB |
| Version | 1.0 | 2.0 | 2.1 |
|---|---|---|---|
| Linkage Type | Crank-Slider | Prismatic Joint Scotch-Yoke | Scotch-Yoke |
| Total Mass a (grams) | 110 | 6.2 | 1.2 |
| Max. Dimensions (mm) (L × W × H) | 76 × 76 × 64 | 33 × 33 × 21 | 21 × 24 × 11 |
| Component Mass (grams) | |||
| 2 DOF Shoulder Joint | 1.03 | 0.30 | 0.07 |
| Wing Adapter | 0.16 | 0.08 | 0.03 |
| Linkage | 2.12 | 0.18 | 0.08 |
| Crank Arm | 0.47 | 0.12 | 0.05 |
| Stators | 49.4 | 0.21 | 0.06 |
| Motor Casing | 9.55 | 2.91 | 0.16 |
| Sum b | 62.7 | 3.79 | 0.45 |
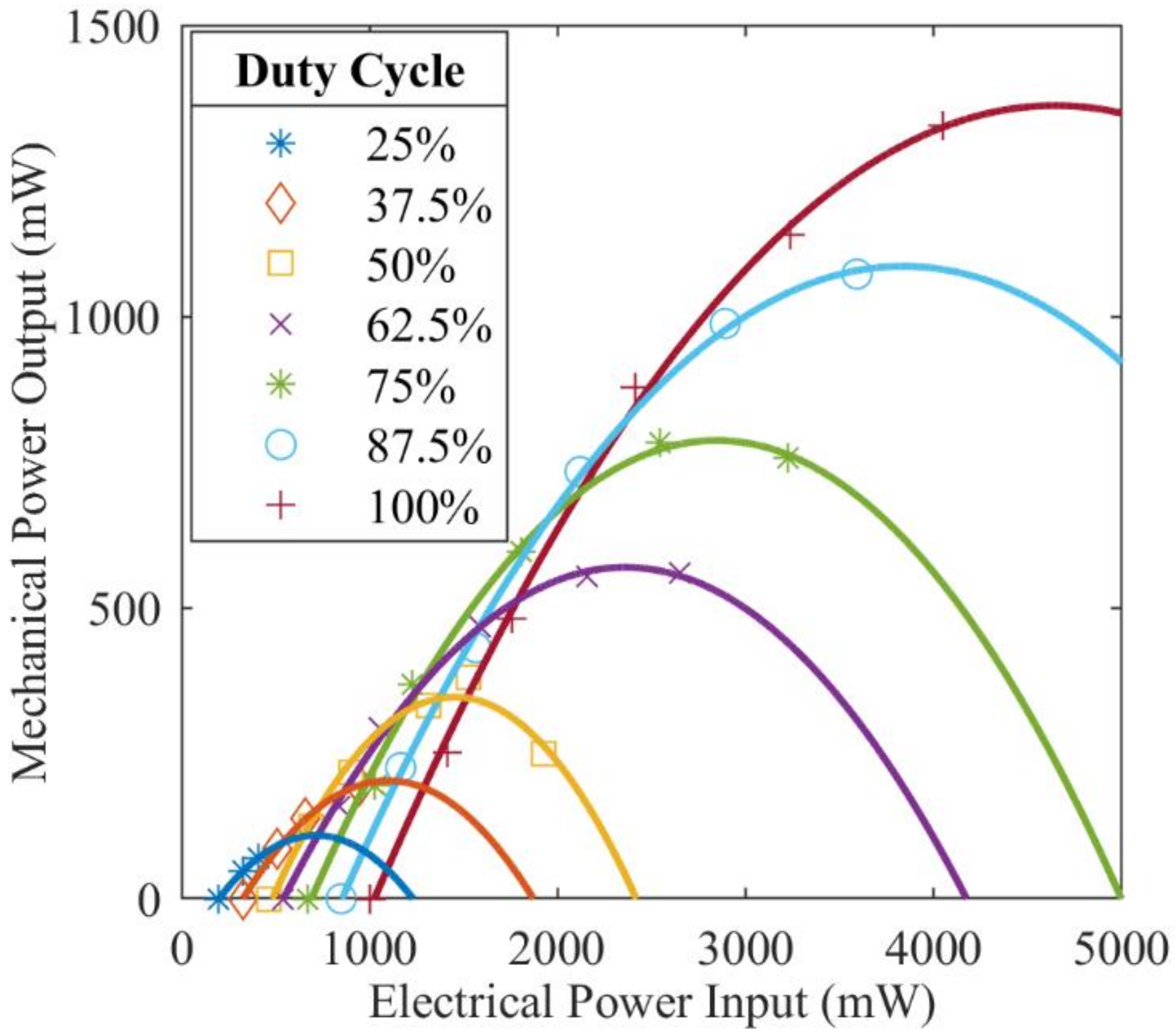
| Duty Cycle | FWM Only | FWM w/ Simulated Masses | FWM w/ Forewings | ||||||
|---|---|---|---|---|---|---|---|---|---|
| v2.0 | v2.1 | (R) | v2.0 | v2.1 | (R) | v2.0 | v2.1 | (R) | |
| 25% | 48 ± 9 | 9 ± 6 | 82% | 34 ± 8 | 20 ± 6 | 42% | 54 ± 8 | 26 ± 4 | 53% |
| 37.5% | 78 ± 16 | 10 ± 18 | 87% | 78 ± 17 | 49 ± 18 | 37% | 124 ± 19 | 89 ± 10 | 28% |
| 50% | 128 ± 32 | 4 ± 18 | 97% | 140 ± 33 | 88 ± 24 | 37% | 301 ± 22 | 207 ± 28 | 31% |
| 62.5% | 195 ± 17 | 58 ± 15 | 71% | 270 ± 13 | 202 ± 29 | 25% | 503 ± 17 | 334 ± 10 | 34% |
| 75% | 312 ± 30 | 65 ± 26 | 79% | 424 ± 37 | 361 ± 45 | 15% | 780 ± 4 | 540 ± 33 | 31% |
| 87.5% | 468 ± 33 | 91 ± 28 | 81% | 644 ± 43 | 461 ± 40 | 28% | 1061 ± 12 | 797 ± 37 | 25% |
| 100% | 808 ± 51 | 182 ± 13 | 78% | 903 ± 25 | 704 ± 13 | 22% | 1354 ± 6 | 940 ± 36 | 31% |
| FWM Configuration | Lift (mg Force) | Mechanical Power Input (mW) | Flapping Frequency (Hz) |
|---|---|---|---|
| FWM Only | 91 ± 20 | 739 ± 145 | 19.9 ± 0.4 |
| FWM w/Simulated Mass | 84 ± 31 | 745 ± 156 | 19.7 ± 0.6 |
| FWM w/Forewings | 1299 ± 73 | 1261 ± 249 | 21.6 ± 0.7 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moses, K.; Willis, M.; Quinn, R. Biomimicry of the Hawk Moth, Manduca sexta (L.), Produces an Improved Flapping-Wing Mechanism. Biomimetics 2020, 5, 25. https://doi.org/10.3390/biomimetics5020025
Moses K, Willis M, Quinn R. Biomimicry of the Hawk Moth, Manduca sexta (L.), Produces an Improved Flapping-Wing Mechanism. Biomimetics. 2020; 5(2):25. https://doi.org/10.3390/biomimetics5020025
Chicago/Turabian StyleMoses, Kenneth, Mark Willis, and Roger Quinn. 2020. "Biomimicry of the Hawk Moth, Manduca sexta (L.), Produces an Improved Flapping-Wing Mechanism" Biomimetics 5, no. 2: 25. https://doi.org/10.3390/biomimetics5020025
APA StyleMoses, K., Willis, M., & Quinn, R. (2020). Biomimicry of the Hawk Moth, Manduca sexta (L.), Produces an Improved Flapping-Wing Mechanism. Biomimetics, 5(2), 25. https://doi.org/10.3390/biomimetics5020025