1. Introduction
Soft crawling robots [
1,
2] are widely used in medical [
3] and industrial [
4] applications and daily life due to their superb environmental adaptability and geometric access capabilities. The design of most soft crawling robots is inspired by various types of crawling organisms that have evolved in nature over billions of years and have completely adapted to their environments. Studying how animals move around their complex, unpredictable environments could provide valuable insights into emerging robotics applications in medicine, search and rescue, disaster response, and humans [
5]. For example, organisms such as inchworms and worms can be well adapted to crawling on columnar objects such as tree trunks. Koh et al. [
6] mimicked the motion of inchworms with SMA and designed the Omegabot to achieve crawling on tree trunks. Khan et al. [
7] designed the iCrawl robot by utilizing inchworm morphology and evolutionary behavior to adapt to and climb complex environments such as the outer surfaces of metal tubes. Creatures such as fish are well-adapted to the underwater environment and achieve movement. Romano et al., inspired by the Karan swimmers, used the magnetic field interaction of permanent magnets to convert the motor’s rotating motion into an oscillating motion to achieve its motion in water [
8]. Inspired by carangiform fish, Liu et al. designed a multi-articular robotic fish that realized two basic motion modes: straight cruise and C-shaped sharp turn [
9].
Based on the motion patterns of different crawling organisms, the current, relatively mature soft robot motion mechanisms include inchworm-like motion, worm-like motion, and snake-like meandering motion.
The body of an inchworm can be divided into three parts: trunk, front end, and rear end. When the inchworm moves, it first fixes the front end, bends the trunk to form an Ω shape, then fixes the rear end, and then relaxes the trunk to move forward. Since the posture formed by the body in inchworm-like motion is similar to the symbol Ω, the inchworm-like motion movement is also called Omega motion [
10]. Based on the inchworm motion, Zhang et al. [
11] designed a soft crawling robot to realize the transition from a flat surface to a slope. The same design idea is also used for the pneumatic soft robot PISROB designed by Xie et al. [
12], which can crawl on smooth flat plates as well as round rods.
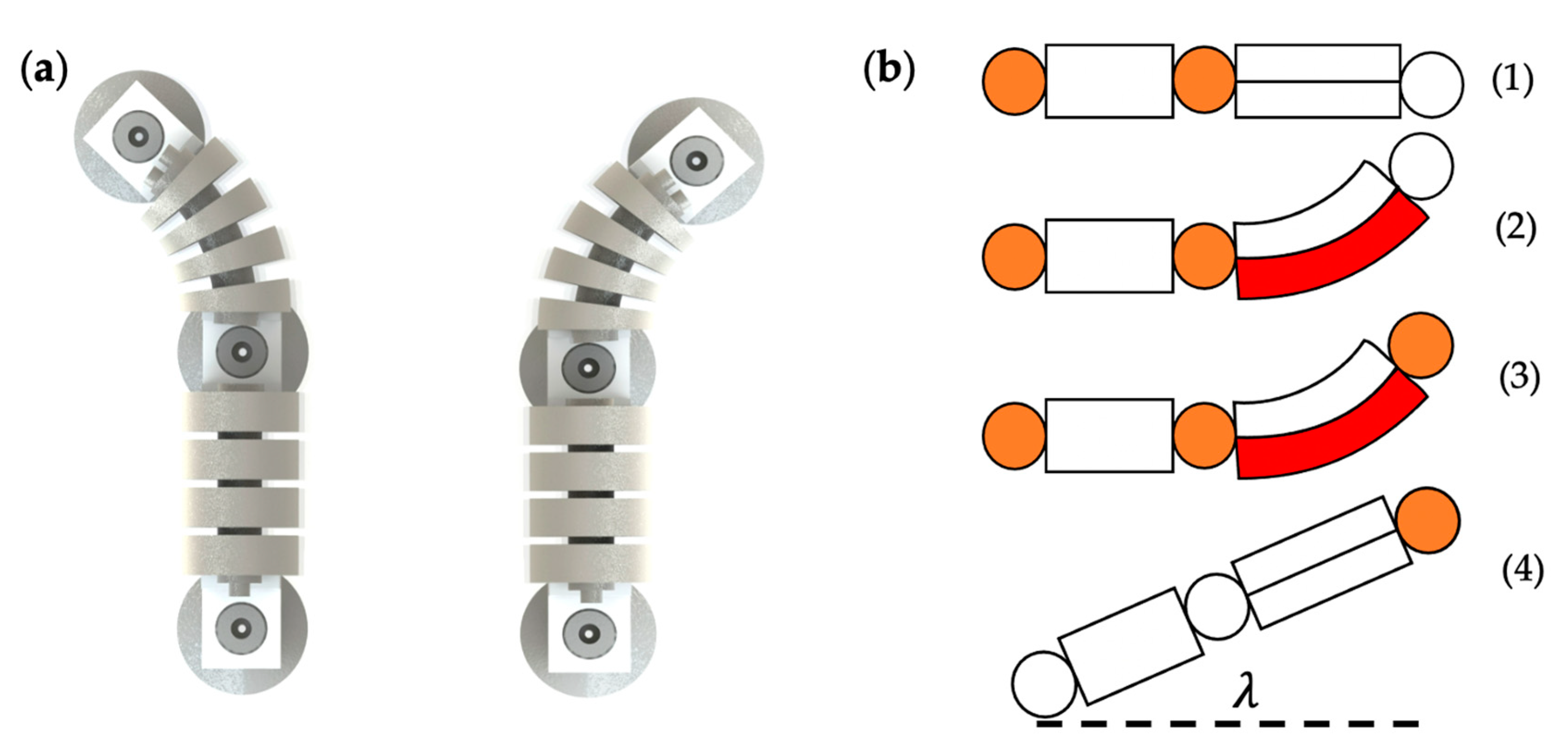
The carapace of worms, earthworms, and other annelids is a typical static skeletal structure. In the case of the earthworm, for example, its muscles are oblique and consist of the annulus and longitudinal muscles. When the longitudinal muscle of a somite contracts, the diameter of the somite increases and the length decreases; when the circular muscle contracts, the diameter of the somite decreases and the length increases. Earthworms achieve forward motion through traveling waves generated by muscle contractions between individual body segments [
13]. This type of movement is called worm-like motion. Qin et al. [
14] designed a worm-like soft robot based on this property, and it can walk in a straight line, turn, and even crawl on vertical walls. Zhang et al. [
15] also designed a soft robot that can adapt to complex pipeline environments based on a worm-like motion pattern.
Snakes have a slightly more complex locomotion mechanism than the above two animals. The basic movement of snakes is called meandering, and all snakes can crawl forward in this manner. When crawling, the snake’s body forms a horizontal wave-like bend on the ground so that the back side of the bend applies force to the rough ground, and the reaction force from the ground pushes the snake’s body forward [
16]. Based on the meandering motion of snakes, Cao et al. [
17] proposed a new mechanism for the slithering motion of snake-like soft robots. They verified the slithering motion mechanism of snakes using finite element method (FEM) simulations. Branyan, C et al. [
18] presented an entirely soft snake robot designed to implement the prerequisite shape space for slithering gaits.
For crawling soft robots, the anchoring method also affects the robot’s ability to adapt to complex environments and perform complete corresponding movements. Currently, commonly used anchoring devices include friction feet, grippers, vacuum suction cups, etc. The friction foot relies on a specific structure that increases the friction between the contact surface to achieve anchoring. Liu et al. [
19] studied a new design integrating a single pneumatic actuator and a negative Poisson’s ratio structure to change the friction force by elongating the pneumatic actuator and changing the negative Poisson’s ratio structure at both ends to achieve the elongation motion and anchoring motion of the soft robot in creeping motion. The design of crawling feet can reduce the number of actuators. Nevertheless, it is challenging to achieve crawling on slopes or walls to overcome gravity due to the poor stability of the anchoring method with applied friction.
Grippers include soft grippers and rigid grippers. The soft caterpillar soft robot studied by Shane et al. [
20] applied a passive grasping, active-release soft gripper to achieve climbing on tree branches. Lam et al. [
21] studied the tree bot, which used the active clamping of a rigid-body gripper to achieve crawling on a tree trunk. Collectively, the soft gripper can better adapt to different shapes of rods, and the rigid gripper can provide more clamping force. Nonetheless, the anchoring method of applying the gripper is only suitable for climbing columnar objects such as pipes and tree trunks and does not apply to vertical surfaces.
The sucker adopts the principle of a vacuum and can use the vacuum’s negative- pressure “adsorption” surface to achieve the purpose of anchoring. Vacuum adsorption has the advantages of being clean, allowing smooth adsorption, and being reliable, and it does not damage the surface of the anchored objects, commonly used in the anchoring of smooth walls. Huang et al. [
22] realized the anchoring of a multimodal soft robot using vacuum suction cups to climb vertical walls and transition from one surface to another.
The actuator is an essential part of the soft robot. The current drive methods of soft robots mainly include pneumatic [
23], dielectric elastomer (DE) [
24], wire drive [
25], shape memory alloys (SMA) [
26], etc. Due to the simple control, rapid response, and low manufacturing cost of pneumatic actuators, they are still the mainstream driving method in soft crawling robots. Pneumatic actuators are generally manufactured using hyperelastic materials such as silicone rubber by injection molding, fused deposition modeling (FDM), stereolithography appearance (SLA), and direct ink writing (DIW) [
27]. However, due to the low stiffness of the flexible actuators manufactured in these ways, they are subject to gravity. They are not suitable for working on large, inclined slopes or on vertical walls.
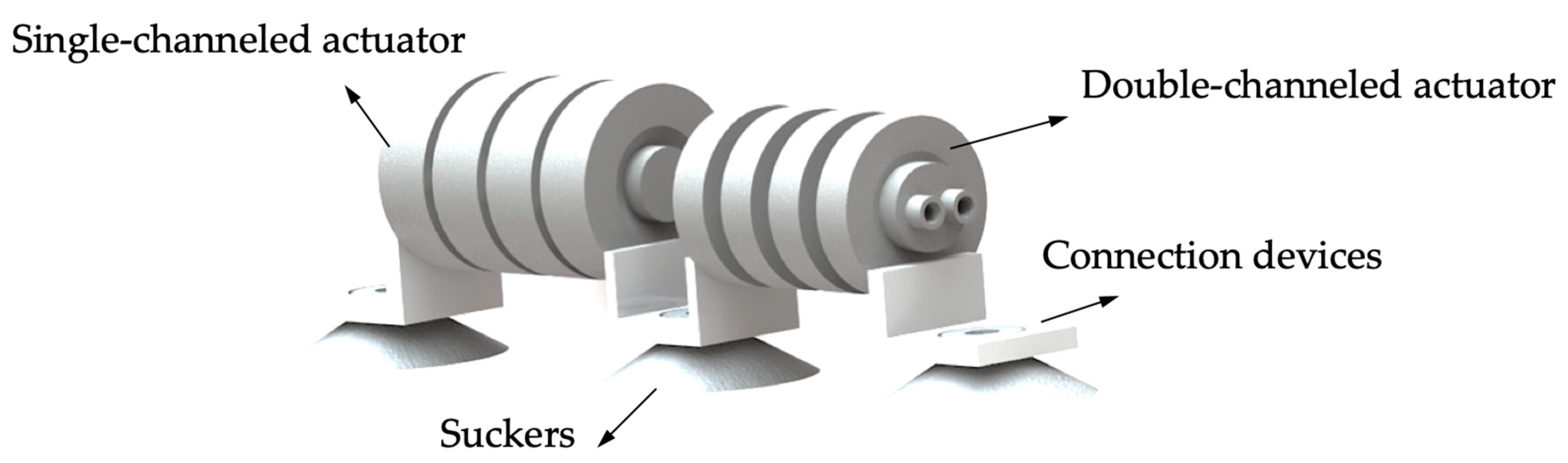
After a comprehensive analysis of the locomotion mode, anchoring mode, actuator structure, manufacturing, and material issues, this paper presents a worm-like pneumatic soft crawling robot. With the coordination of the actuators and suckers, two modes of locomotion can be realized: straight-line and turning, thereby resolving one of the drawback of the existing soft robots, which is that they only possess a single motion mode. The actuators are innovatively manufactured by selective laser sintering of TPU powder with a Shore hardness of 90A, which improves the manufacturing accuracy and dramatically increases the stiffness of the actuator, reducing the impact of gravity on the actuator during movement while ensuring the hyperelasticity of the actuators. Hence, this robot can adapt to complex environments, such as crawling on slopes and vertical walls, and not just on flat ground. Furthermore, compared with the existing soft crawling robots, this robot has a faster moving speed and higher equipment-carrying capacity. It has high application value in the inspection of large tank interiors, civil aviation fuselages and wings, and in glass curtainwall-cleaning in high-rise buildings.
4. Fabrication and Testing
4.1. Fabrication
In
Figure 15, we present the manufacturing method for the soft actuators. We used selective laser sintering (SLS) of TPU powder for manufacturing.
Selective laser sintering is an additive manufacturing method in which an infrared laser is used as the energy source and a powder as the modeling material. During processing, the powder is first preheated to a temperature slightly below its melting point, and then the powder is laid flat under the action of the rollers; the laser beam is selectively applied for sintering under computer control based on the information of the layered cross-section, and after one layer is completed, the platform is lowered. The rollers again lay the next layer of powder flat and sinter it, and the excess powder is removed after the sintering is completed to obtain the final part.
The most significant advantage of the SLS process is the wide selection of materials, such as nylon, wax, ABS, metal, and ceramic powder, that can be used as sintering objects. In this design, we chose TPU powder. Since TPU powder has high elasticity and stiffness characteristics, the soft actuator can achieve large elastic deformation after sintering. At the same time, the high stiffness of the TPU actuator will increase the stability and load capacity of the robot working on vertical walls.
Secondly, during the manufacturing process using the SLS method, the un-sintered part of the powder bed becomes a support structure for the sintered part, so there is no need to consider a support system. This is highly suitable for the actuator with the channel structure designed in this paper.
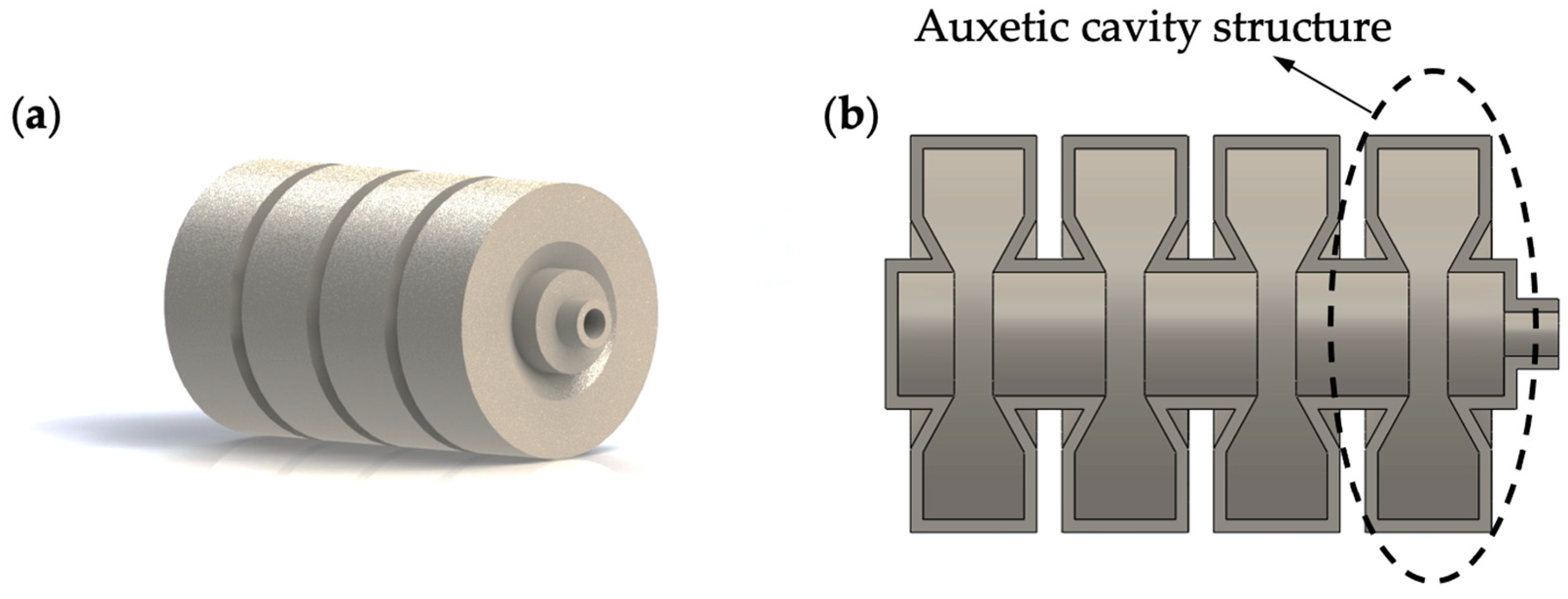
Figure 16a,b show the fabricated single-channeled and double-channeled actuators, respectively. The connecting devices are glued to the actuator, and the suckers are attached to the connecting devices by interference fit.
Sucker attachment is used as the anchoring method for the robot in this study. The suction force of the suckers translates into friction between the suckers and the contact surface, which is a critical factor in the robot’s ability to crawl steadily on a slope or vertical wall without slipping and is influenced by the coefficient of friction and the size of the suckers. Finding the right suckers and negative pressure air pump is a difficult process to analyze quantitatively, so using a testing method is more straightforward.
The suckers we chose can carry a much larger load than the robot’s weight when attached vertically to glass, wooden materials, etc. The more considerable load margin does not affect the motion of the robot, so it was concluded that these suckers are suitable.
4.2. Testing of the Actuators
The actuators are connected to the air pumps and proportional valves through the air pipes.
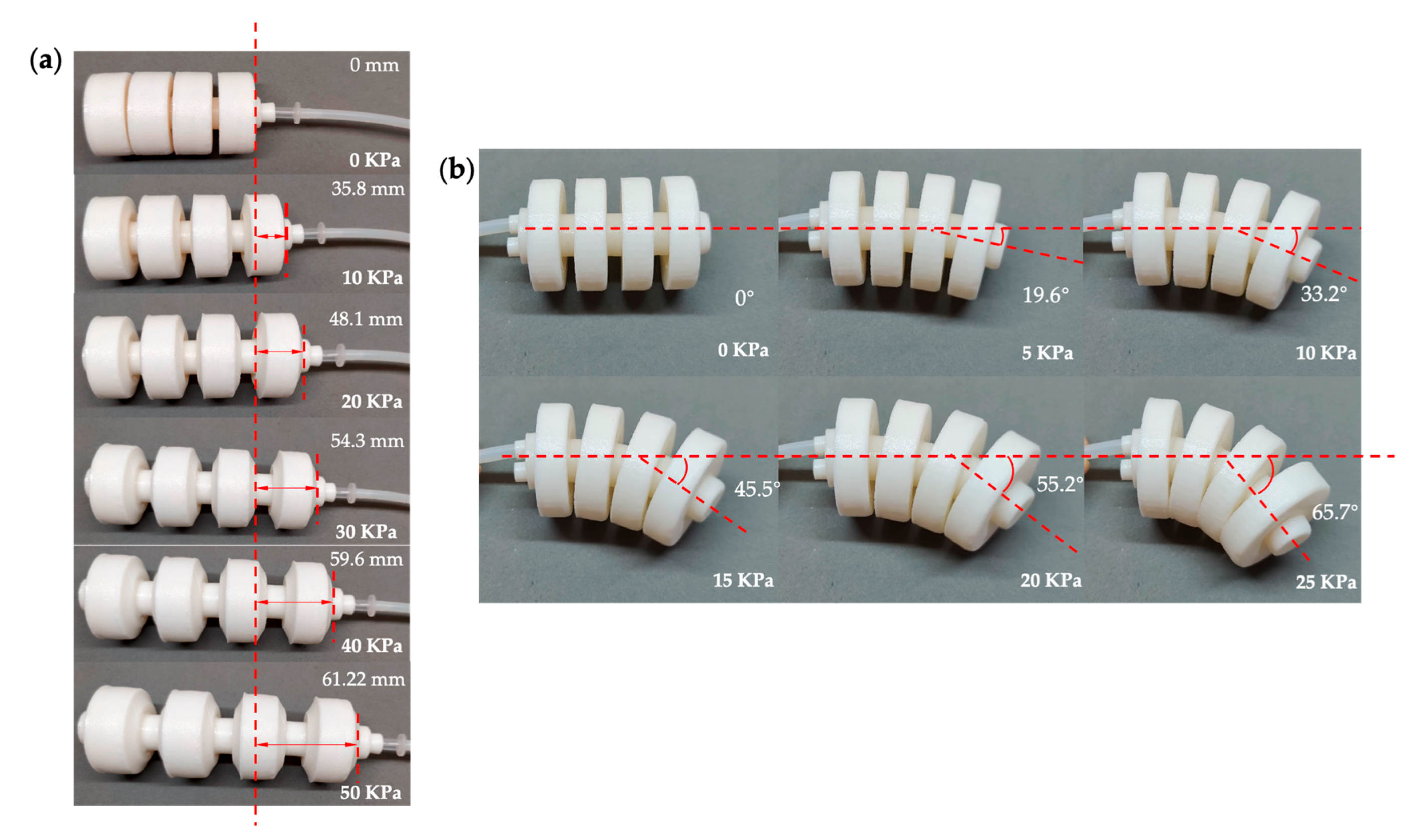
Figure 17a shows the elongation of the inflated single-channeled actuator under air pressure of 0–50 KPa.
Figure 17b shows the bending angle of the inflated double-channeled actuator under air pressure of 0–25 KPa.
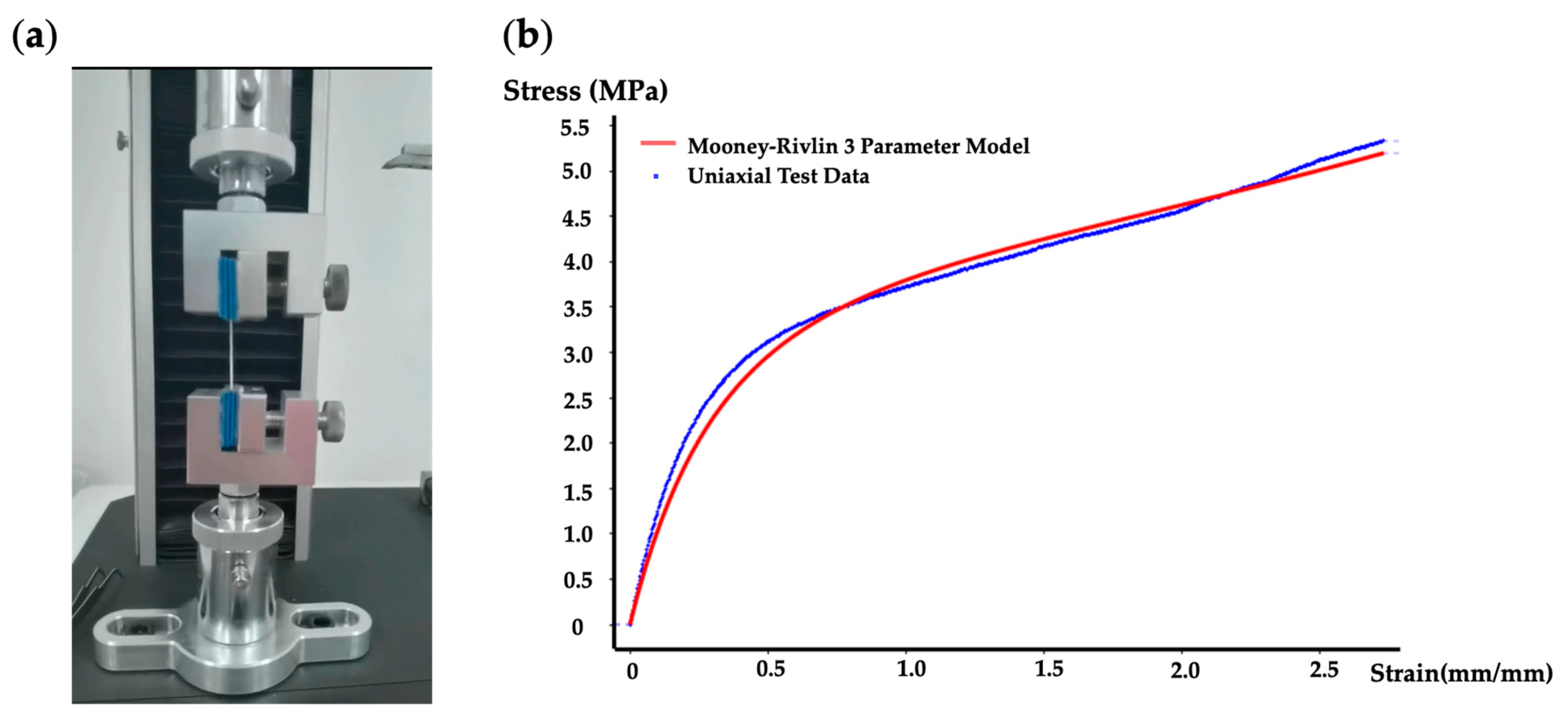
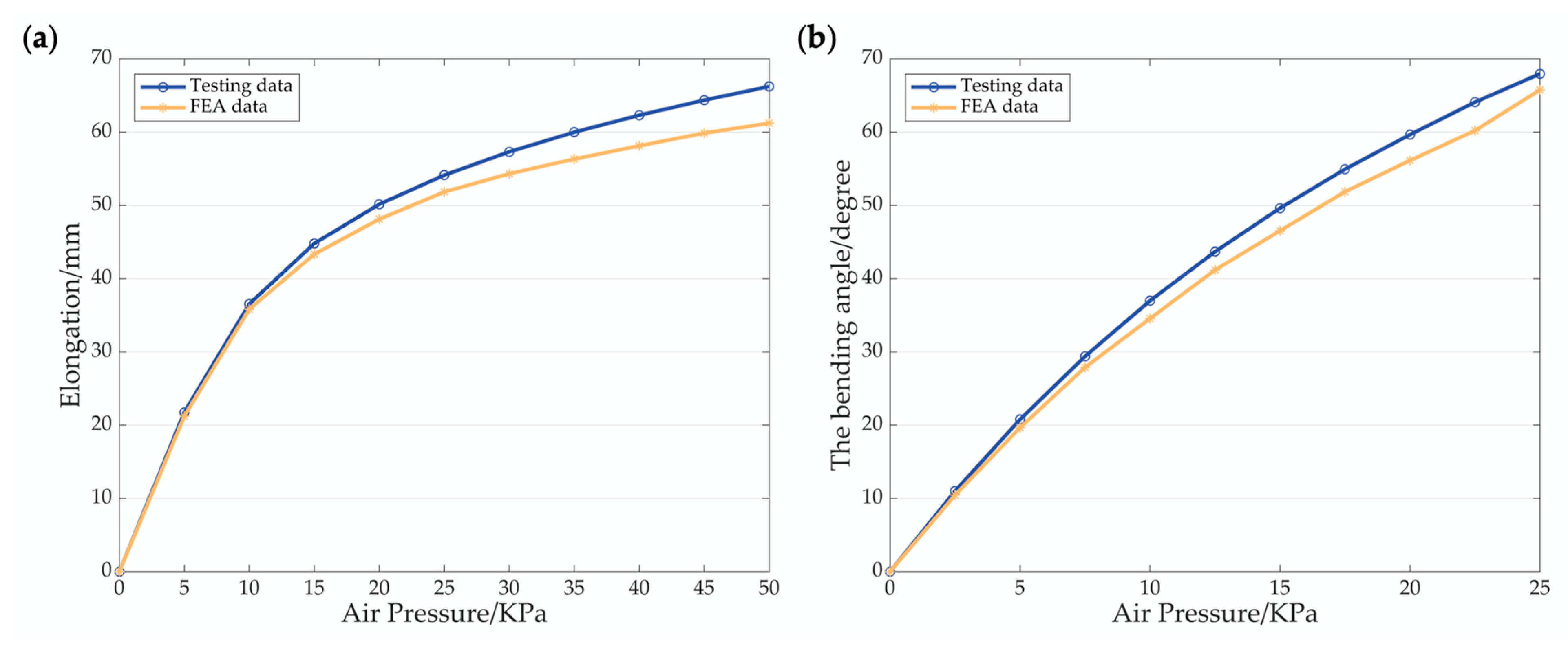
Finite element analysis data and test data are shown in
Figure 18, including the elongation of the single-channeled actuator and the bending angle of the double-channeled actuator. The FEA data and the testing data are similar in tendency, and the maximum difference between the former and the latter is within 10% in numerical value. When the air pressure is low, the difference between the two is not significant, and as the air pressure gradually rises, the difference between the two increases significantly. There are two reasons for this result. Firstly, the Mooney–Rivlin three-parameter model of hyperelasticity chosen cannot wholly and accurately characterize the TPU material used. Secondly, there may be errors in the manufacturing process, resulting in differences between the actual actuator and the 3D model.
Considering the finite element analysis and testing data, 30 KPa for the single-channeled actuator and 20 KPa for the double-channeled actuator were used as the service pressure values.
4.3. Testing of the Robot Prototype
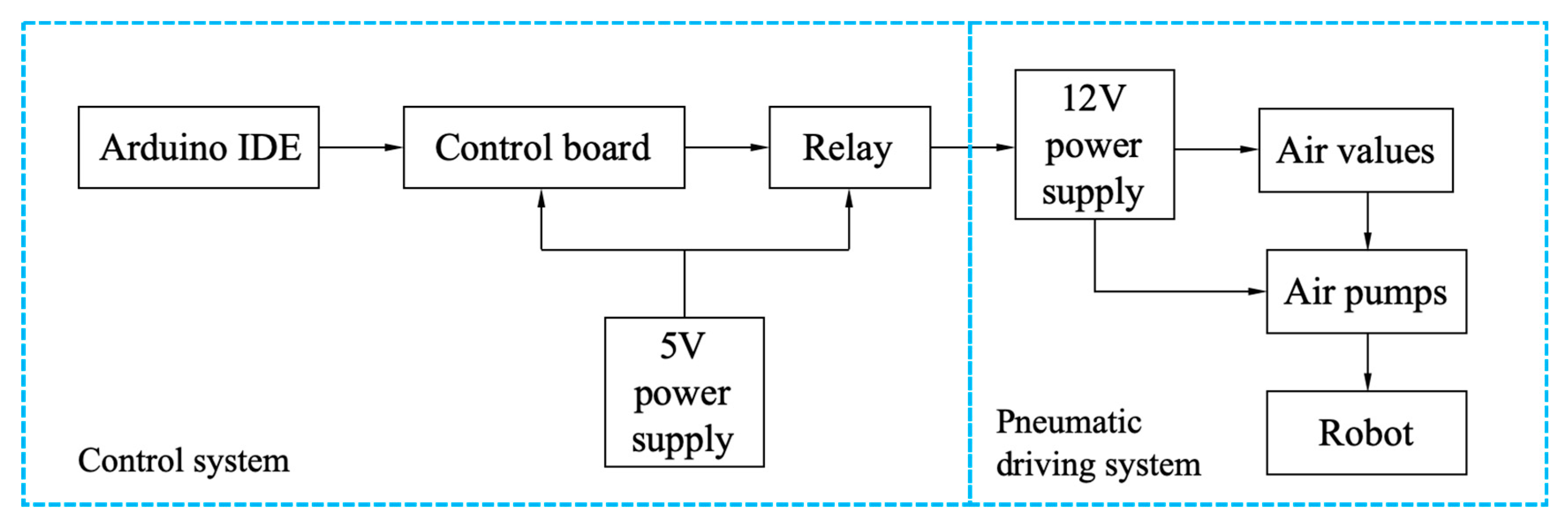
The control scheme of the soft crawling robot, as shown in
Figure 19, includes the control system and the pneumatic driving system. The Arduino IDE at the computer side sends the program to the Arduino Uno control board through the data line, and the control board transmits the signal to the relay, which controls the operation of the air pump and air solenoid valve to achieve robot movement. In addition, the control board and relays are powered by a 5 V battery, and a 12 V battery powers the air pump and air solenoid valve.
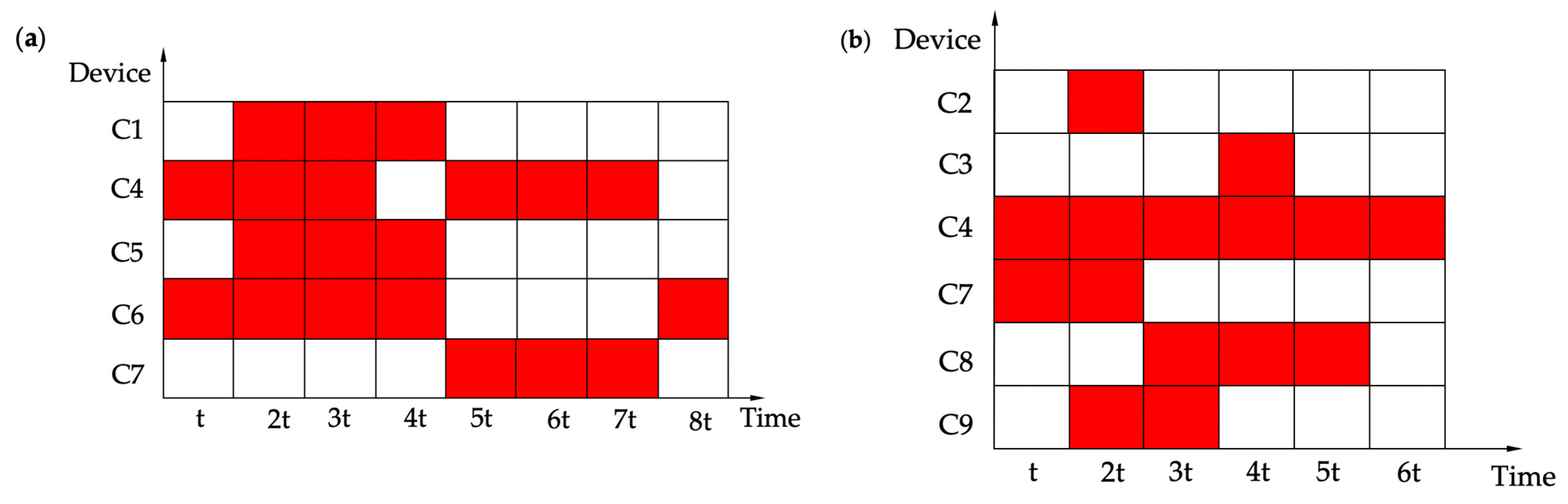
To maintain the coherence of the robot’s motion, it is necessary to ensure that the individual hardware devices cooperate. In
Table 1, C1–C9 represent different devices, respectively. As shown in
Figure 20, the hardware devices are demonstrated as working or idle during one cycle. The red indicates that the hardware device is working, and the white indicates that the hardware device is idle.
t is the variable unit time, which can be modified according to the testing situation.
According to the control scheme, the circuit control system and the pneumatic drive system were built. Considering the response speed of the air pumps, the unit variable time was set to 1 s.
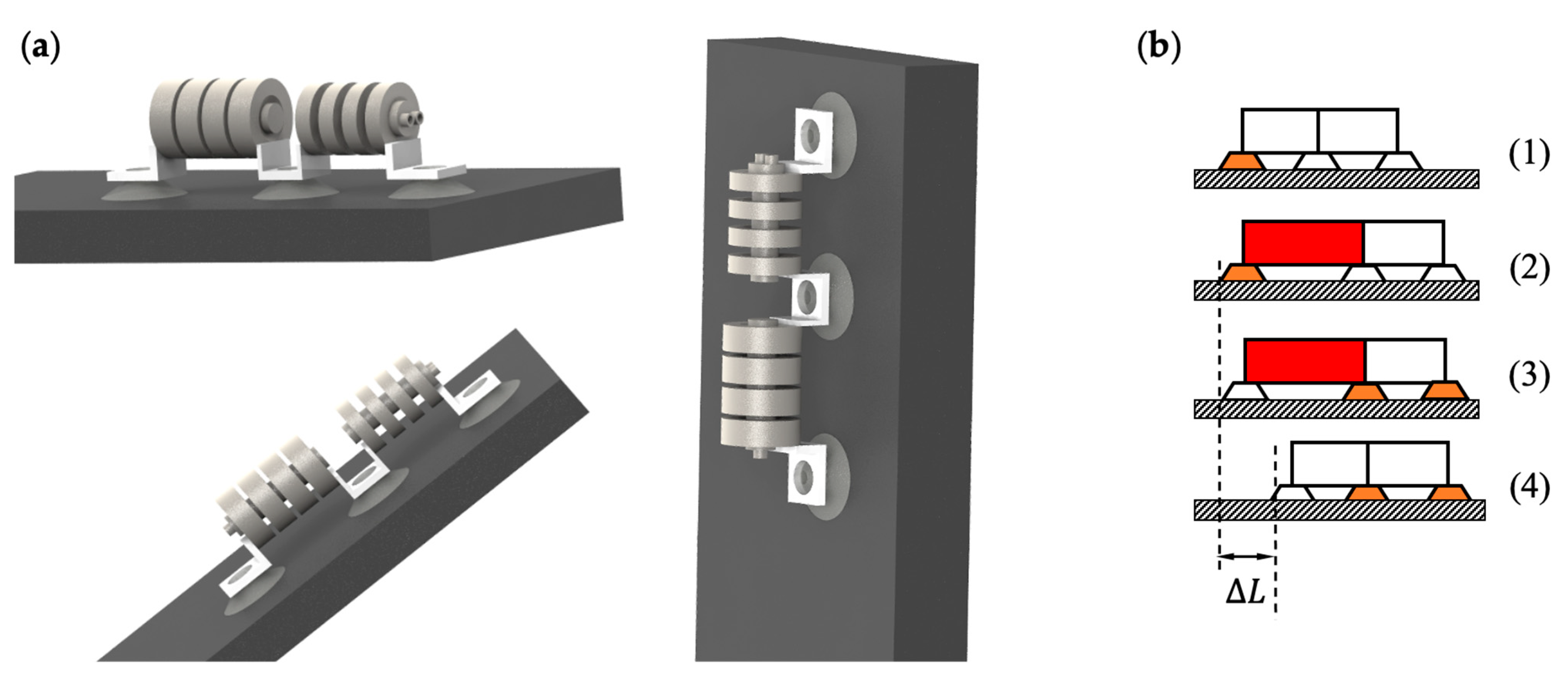
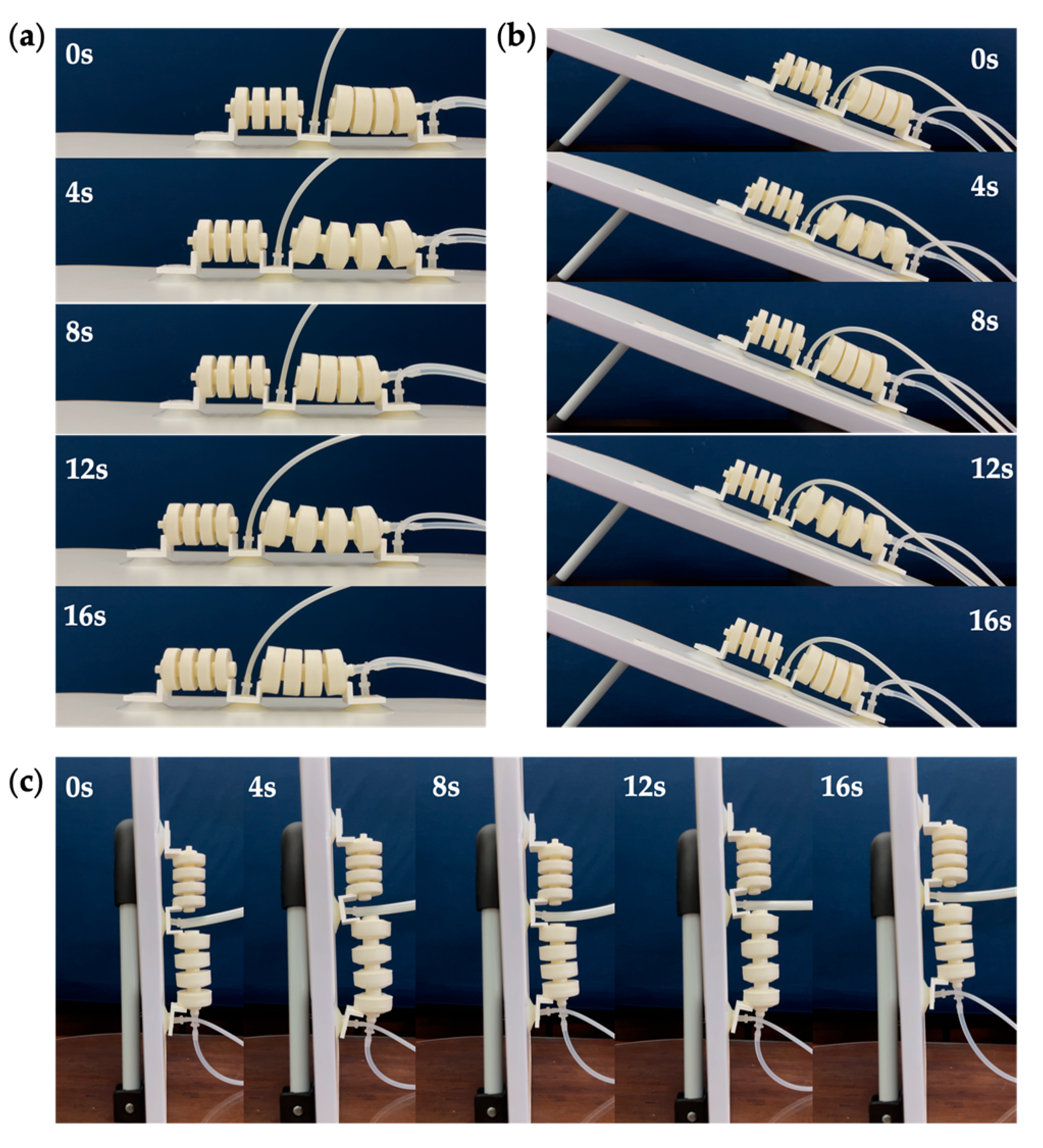
Figure 21 shows the straight-line locomotion testing of the robot prototype, which can crawl on flat ground, slopes, and vertical walls. A more powerful vacuum pump was used during vertical wall crawling to ensure suction power. In one cycle, the step length of the robot is 57.2 mm, so the straight-line crawling speed of the robot is approximately 7.15 mm/s. If the inflation rate of the air pump can be raised, then the variable unit time will be shortened, and the crawling speed of the robot will be increased.
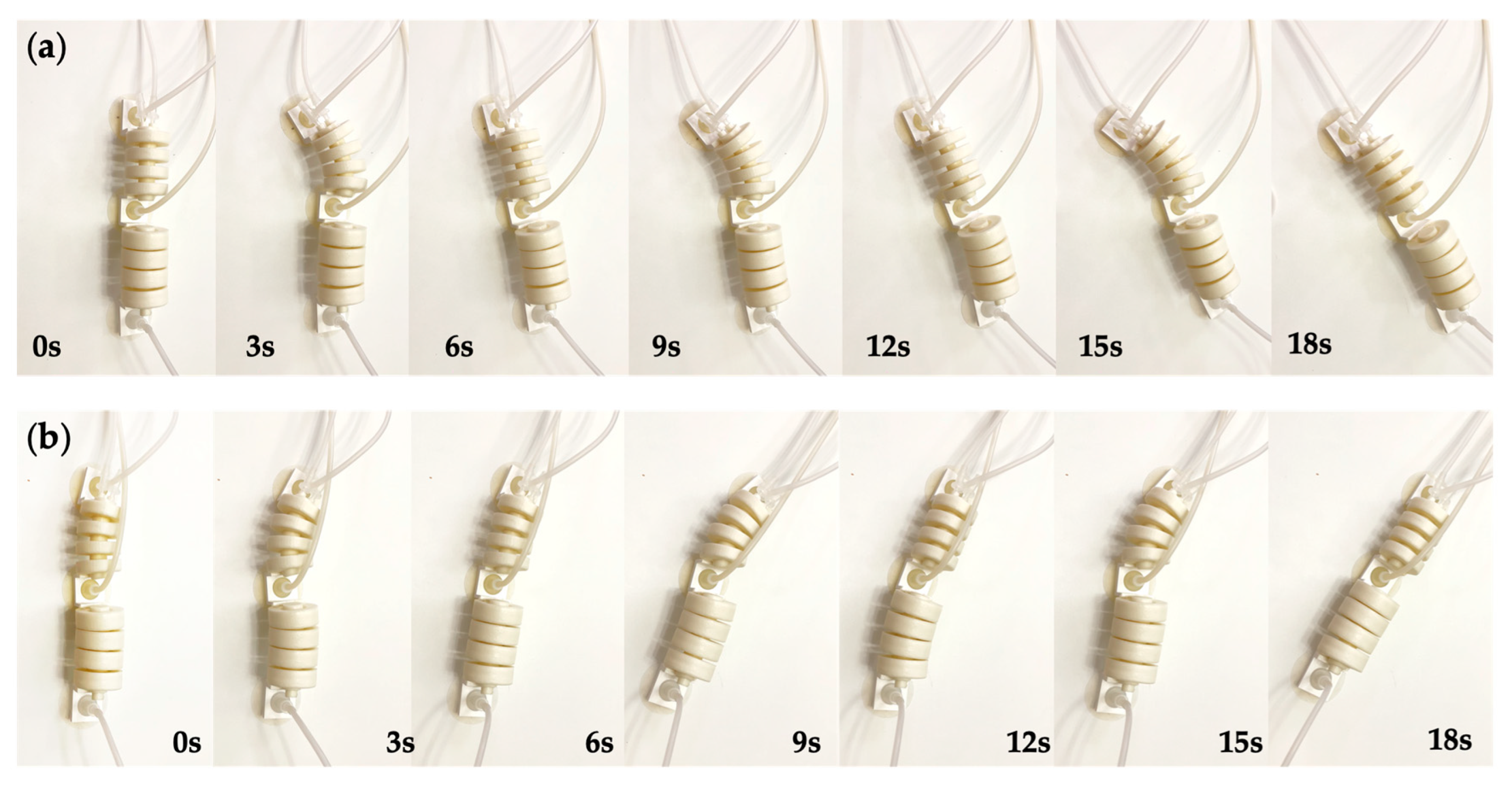
Figure 22 shows the turning testing of the prototype robot, including left and right turning. The turning angle of the robot was 28.8 degrees in one cycle at the service air pressure. The significant difference between the turning angle and the actuator bending angle is that the friction between the suckers and the ground needs to be overcome. Thus, the inflation air pressure of the double-chamber actuator can be increased appropriately.
By combining the turning and straight-line crawling processes, obstacle avoidance of the robot can be achieved, as shown in
Figure 23.
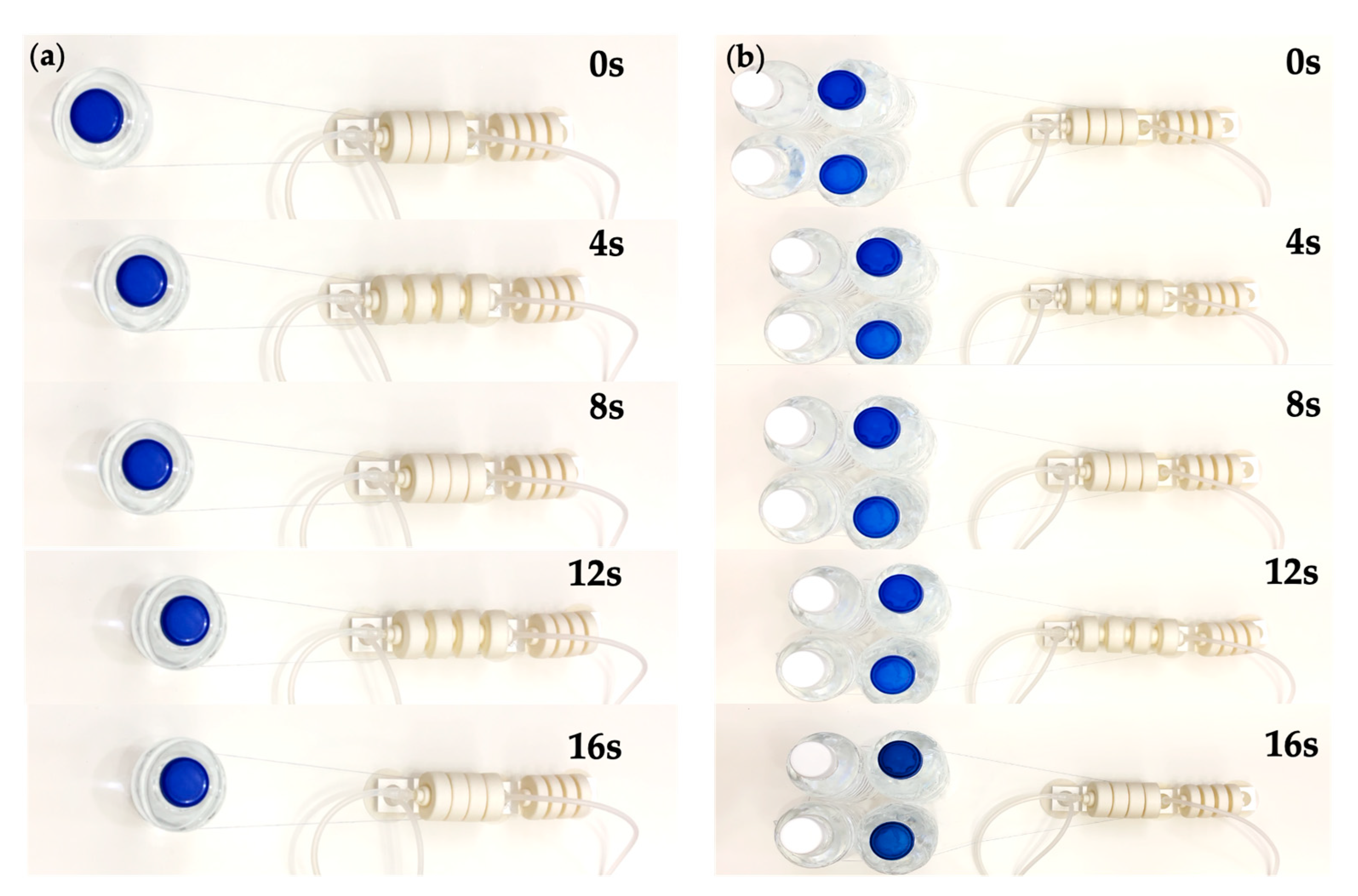
Loads were attached to the robot, as shown in the
Figure 24, and we let the robot drag them. On flat ground, the robot can pull heavy objects that are almost 20 times larger than its own mass. In future applications, we could utilize its equipment carrying capacity to a greater extent.
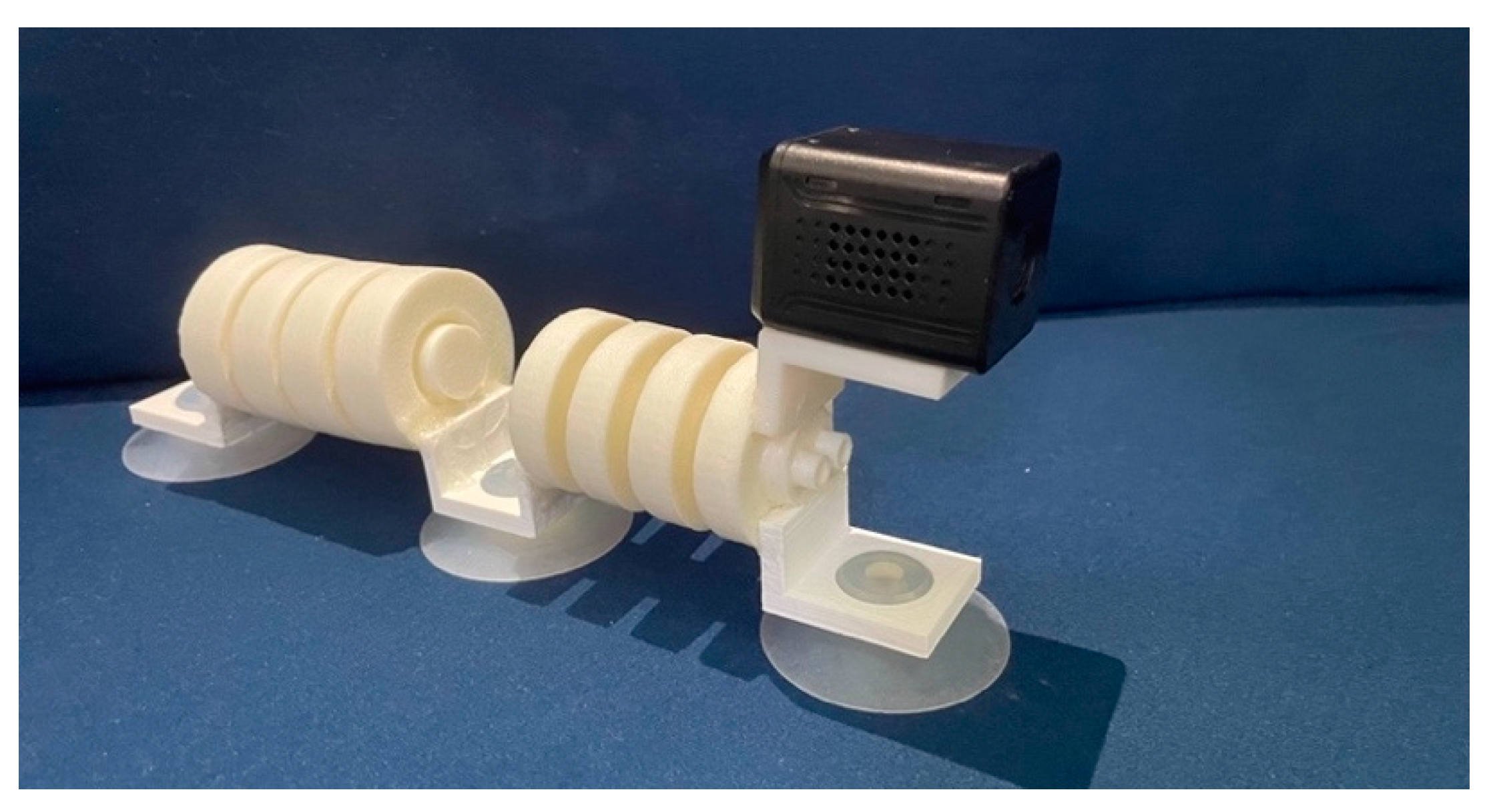
Figure 25 shows the camera module being equipped on the robot in order to combine functions such as visual detection and recognition. A variety of testing of the robot is shown in
Supplementary Video S1.
4.4. COT Discussion
Comparing the locomotor efficiency of various robots and organisms is possible using the dimensionless metric COT (cost of transport). It is computed by dividing the system’s average power input
by the mass
, local gravitational acceleration
, and average speed
. It explains the energy cost of moving a given mass and distance:
The average power drawn from the pumps and valves in one straight motion cycle:
where
are the symbols shown in
Table 1.
Known that,
,
,
,
The robot in this paper has a lower COT value than some other bionic worm crawling robots, particularly rigid-body robots. This means that the robot in this paper can perform the same motion with less energy.
5. Conclusions and Discussion
In this study, a worm-like soft robot based on selective laser sintering of TPU powder was designed, analyzed, and fabricated. Through testing, we verified the feasibility of the prototype for flat ground locomotion, slope locomotion, vertical wall motion, and turning locomotion.
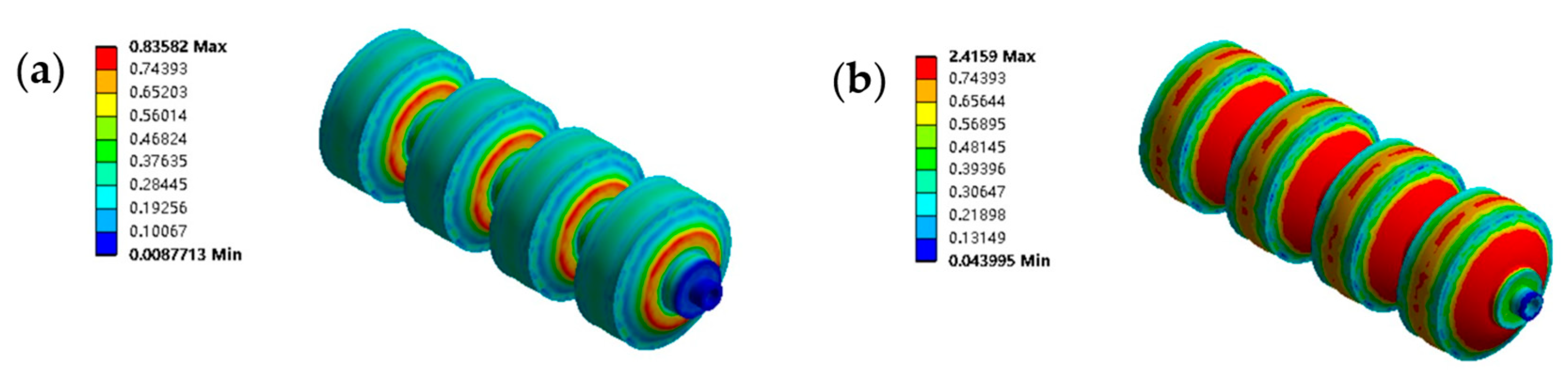
In terms of structure, inspired by worms, single-channeled and double-channeled pneumatic actuators with the auxetic cavity structure were proposed and designed in this paper, in order to achieve elongation and bending, respectively. The FEA method demonstrated that the von Mises stress at the stress concentration is reduced by 189% compared to the actuators without an auxetic cavity structure at the working step. According to the material failure theory, the structural design reduced the probability of crack appearance and growth and improved the service life of the actuators.
In terms of fabrication, this paper utilized the redundant powder’s own internal support based on selective laser sintering technology to fabricate the cavity structure of the soft actuator and improve its fabrication accuracy. At the same time, TPU powder was innovatively used to sinter and manufacture pneumatic actuators with significant stiffness. Compared with the commonly used silicone elastomer actuators, the TPU powder-sintered actuators are less affected by gravity. They can better achieve stability during crawling in different environments, especially on walls.
In terms of function, this paper accomplished the design goal of locomotion on flat ground, slopes, and vertical walls well through the coordination of soft actuators and vacuum suckers. After testing the prototype, the working air pressure of this robot was found to be 30 KPa for single linear motion, the standard step length was 57.2 mm under a working air pressure, and the average speed was 7.15 mm/s. The working air pressure for a single turn was 20 KPa, and the turning angle was 28.8 degrees under the working air pressure. Furthermore, the robot has a strong loading capacity for heavy objects. In the testing, we found that the robot can drag objects of 2000 g on a flat surface.
For this robot, we propose three application scenarios:
Crawling on the inner walls of large containers, such as tanks;
Crawling on the wings and tails of passenger aircraft;
Crawling on glass curtain walls in high-rise buildings in order to clean them.
For application case 1, the tanks are prone to material failure via corrosion due to long-term exposure to liquid and gas mixing conditions. Since the surface curvature of large containers is great, this design can realize crawling in such scenarios and can carry detection equipment such as small cameras. However, due to the limitation of surface roughness, the use of an anchoring method based on suckers may not be stable. Therefore, when applied to non-smooth metal surfaces, the suckers can be considered to replace the electromagnetic anchoring method with variable stiffness. For application case 2, in order to ensure flight safety, airlines need to regularly test the wings and tails of passenger planes. Since these components have a large tilt angle and smooth surface, the robot’s design can be used to realize crawling on the wings and tails of the aircraft while carrying small nondestructive testing equipment. For application case 3, the designed robot can drag and carry a cleaning device containing a spray-cleaning agent with two parallel prototypes to clean key locations on glass curtain walls in high-rise buildings. In conclusion, the design can be adapted to more diverse environments and will have a wider range of industrial applications after the replacement of the anchor modules and by taking into consideration their passive compliant deformation.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}