
Magnetically Tunable Adhesion of Magnetoactive Elastomers’ Surface Covered with Two-Level Newt-Inspired Microstructures


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experiment Section
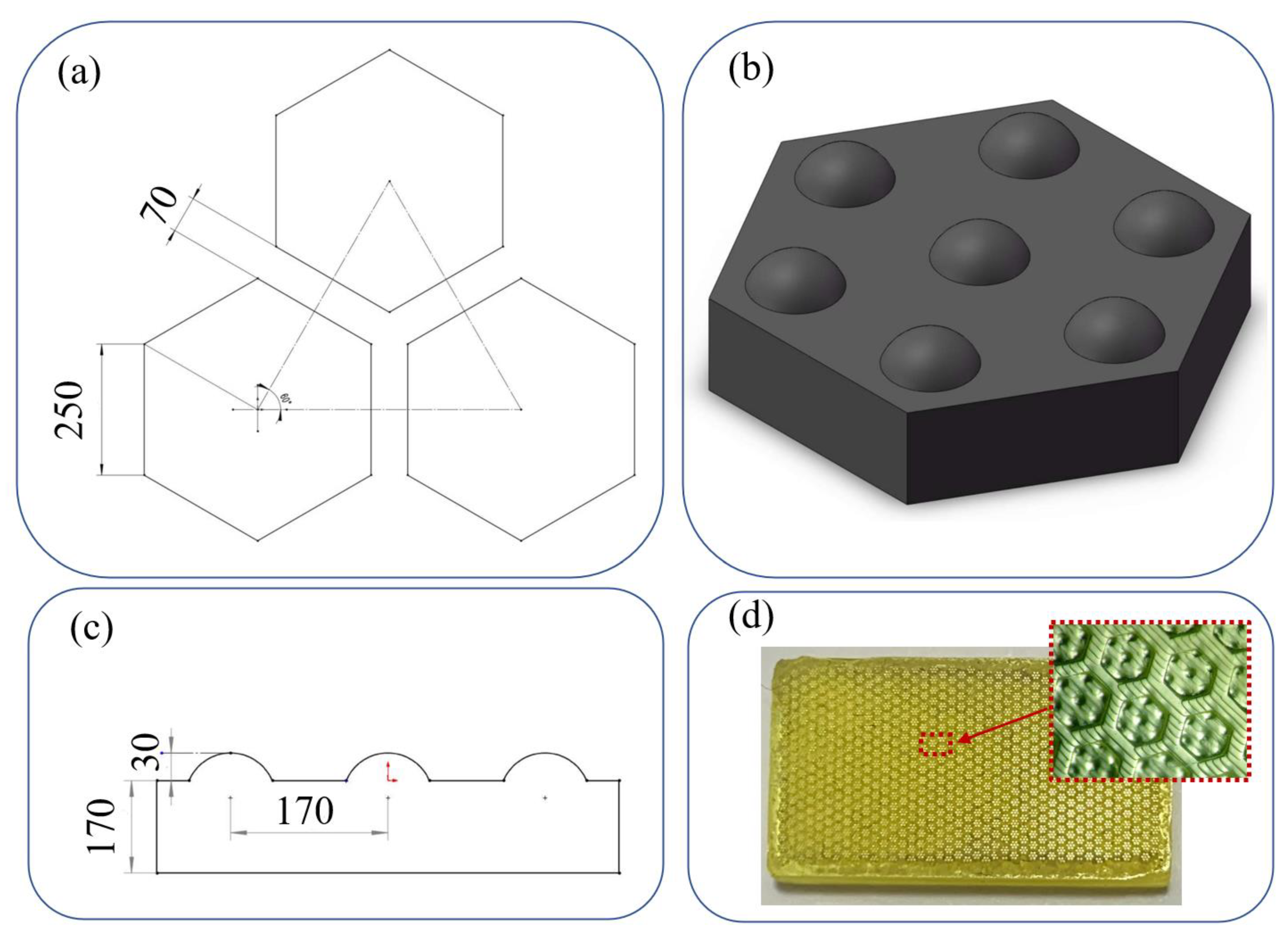
2.1. Biomimetic Structure Design
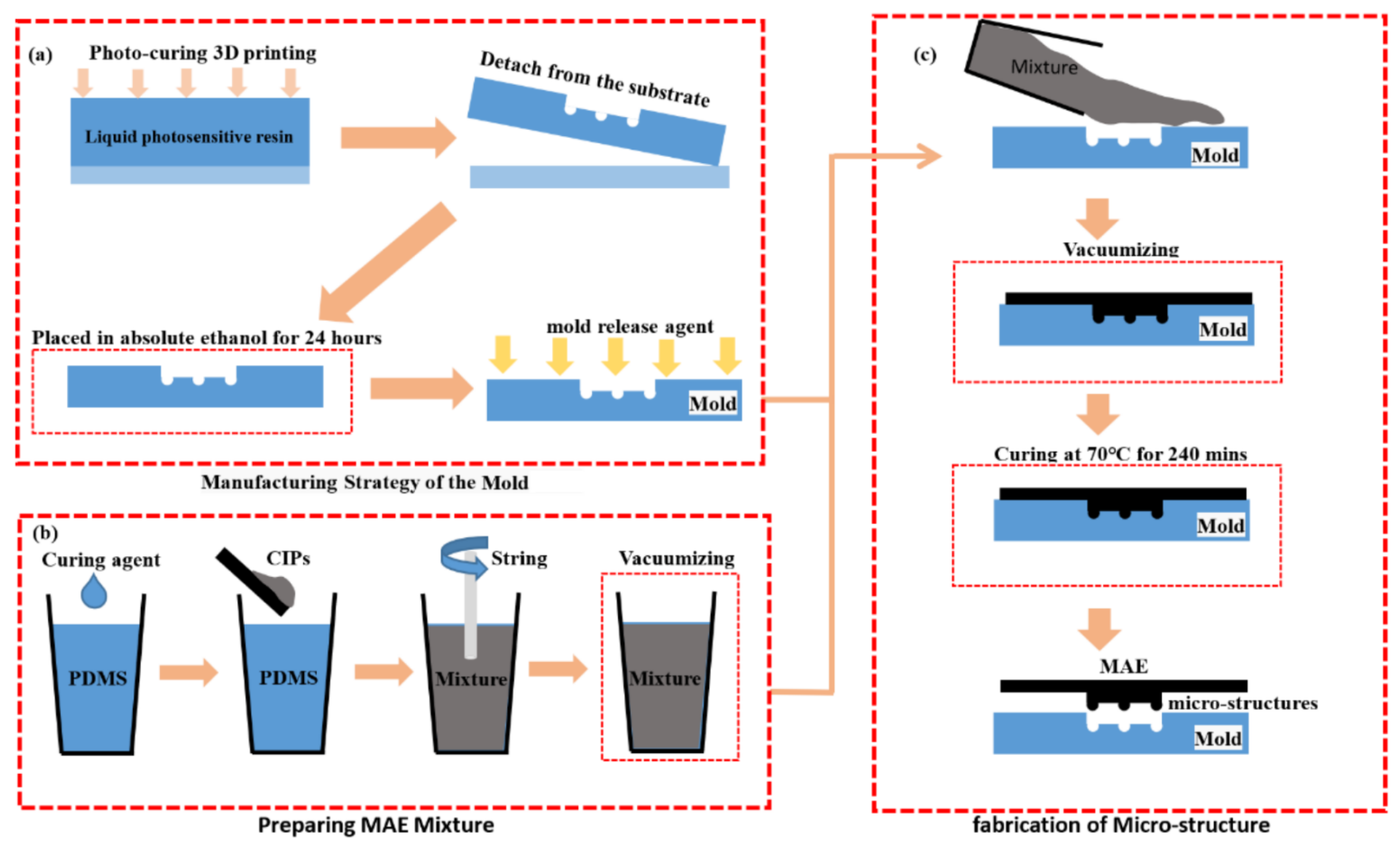
2.2. Biomimetic Structures Preparation
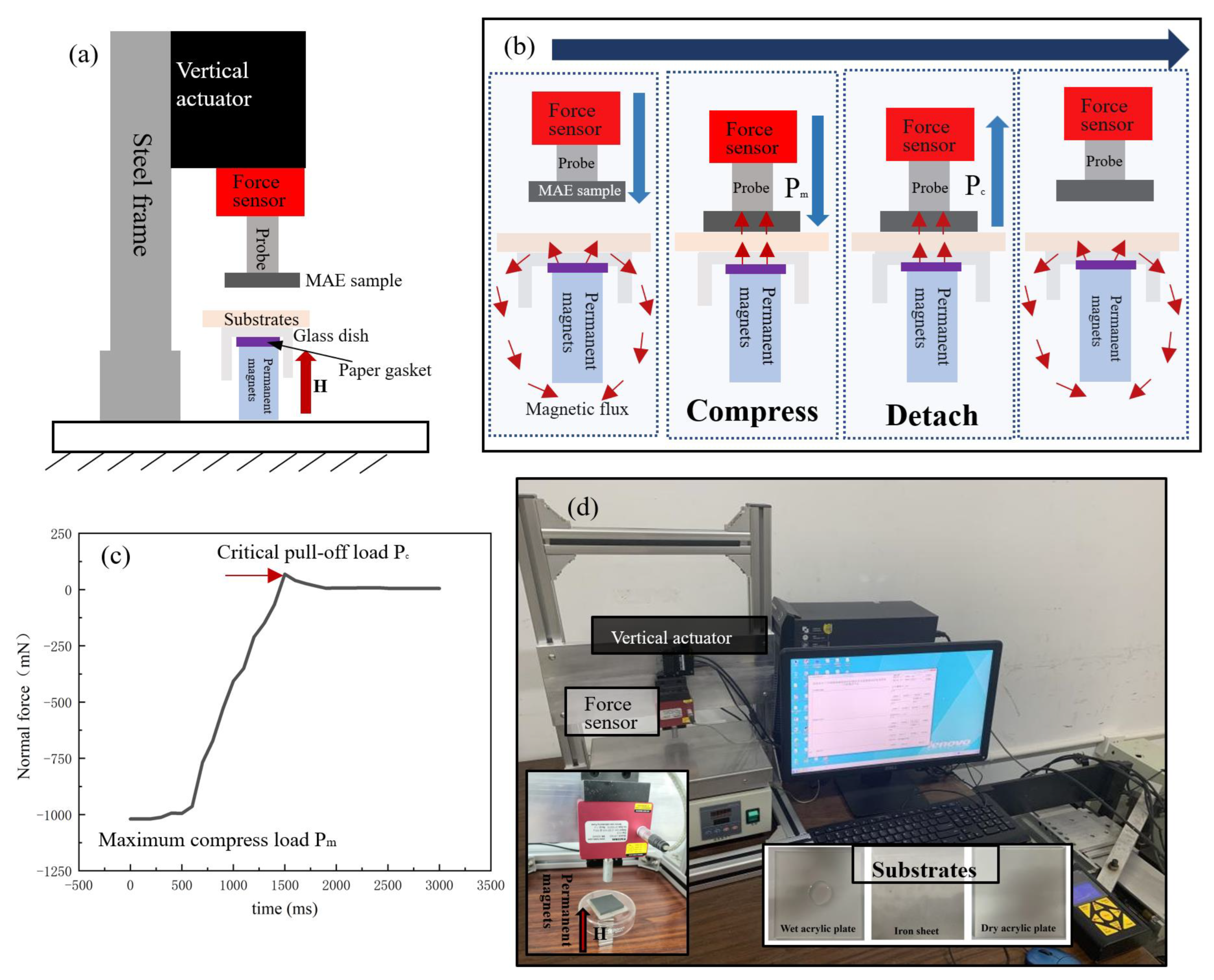
2.3. Contacting Adhesion Testing
3. Results and Discussions
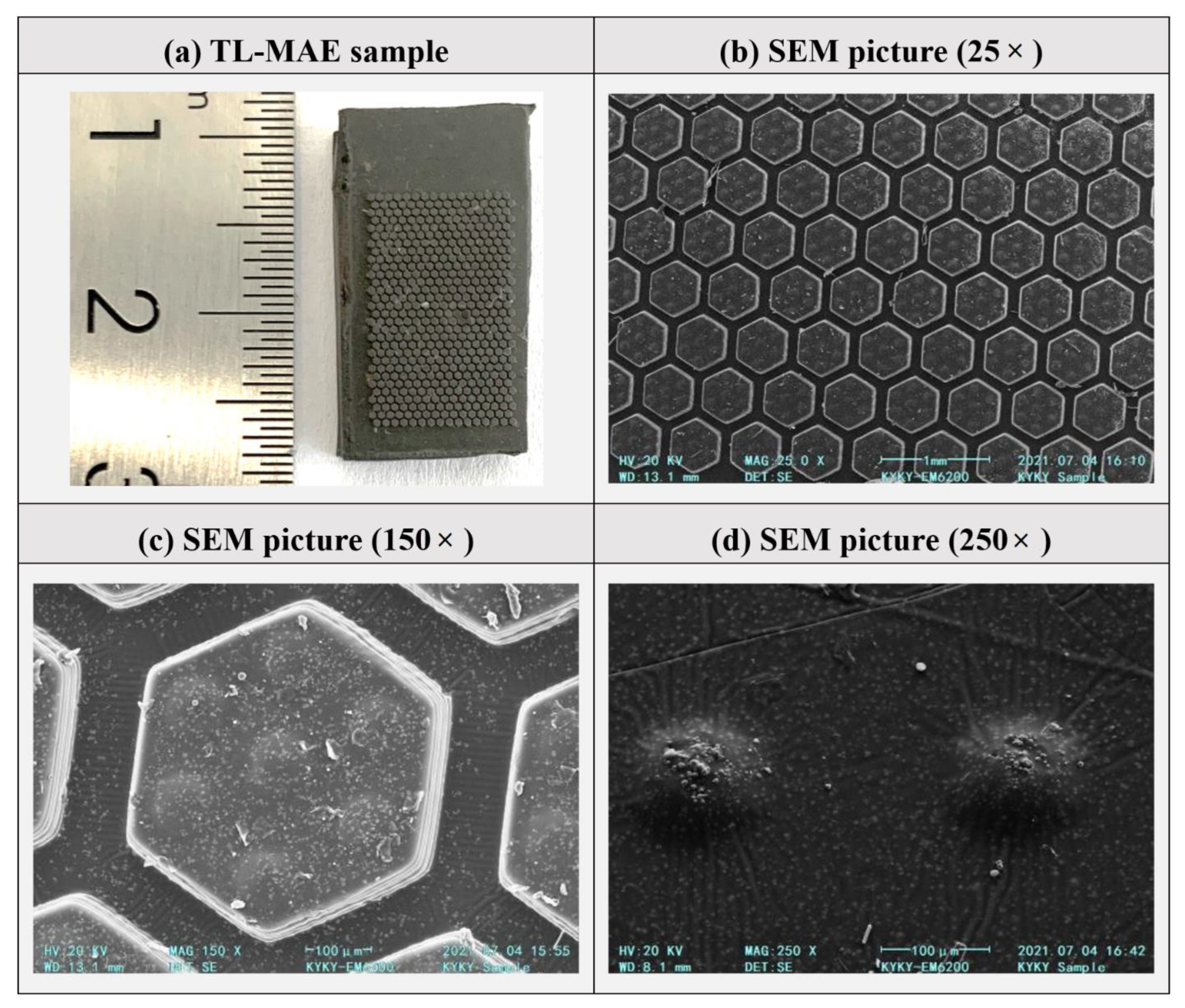
3.1. Surface Morphologies of 2L-MAE
3.2. The Magneto Responsible Adhesion of 2l-MAE
4. Conclusions
- In the absence of a magnetic field, the 2L-MAE exhibits a stronger initial adhesion on the three surfaces than the normal one. Besides, the three 2L-MAE with different volume fraction shows similar adhesion behaviors when they have contacted the surfaces of wet acrylic plate and iron sheet. Moreover, the 2L-MAE material with 20 vol.% exhibits the highest adhesion when they are contacted with a dry acrylic substrate.
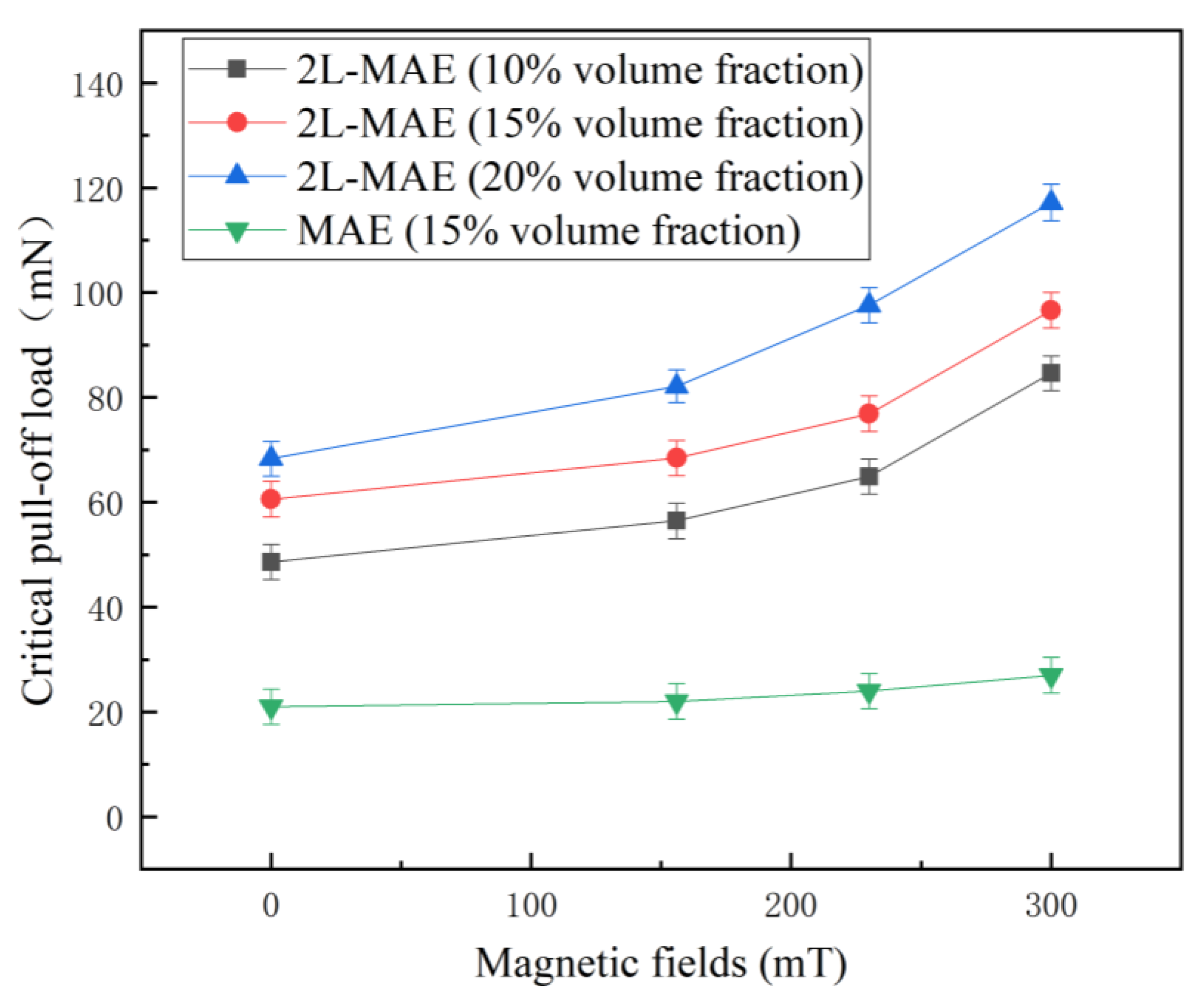
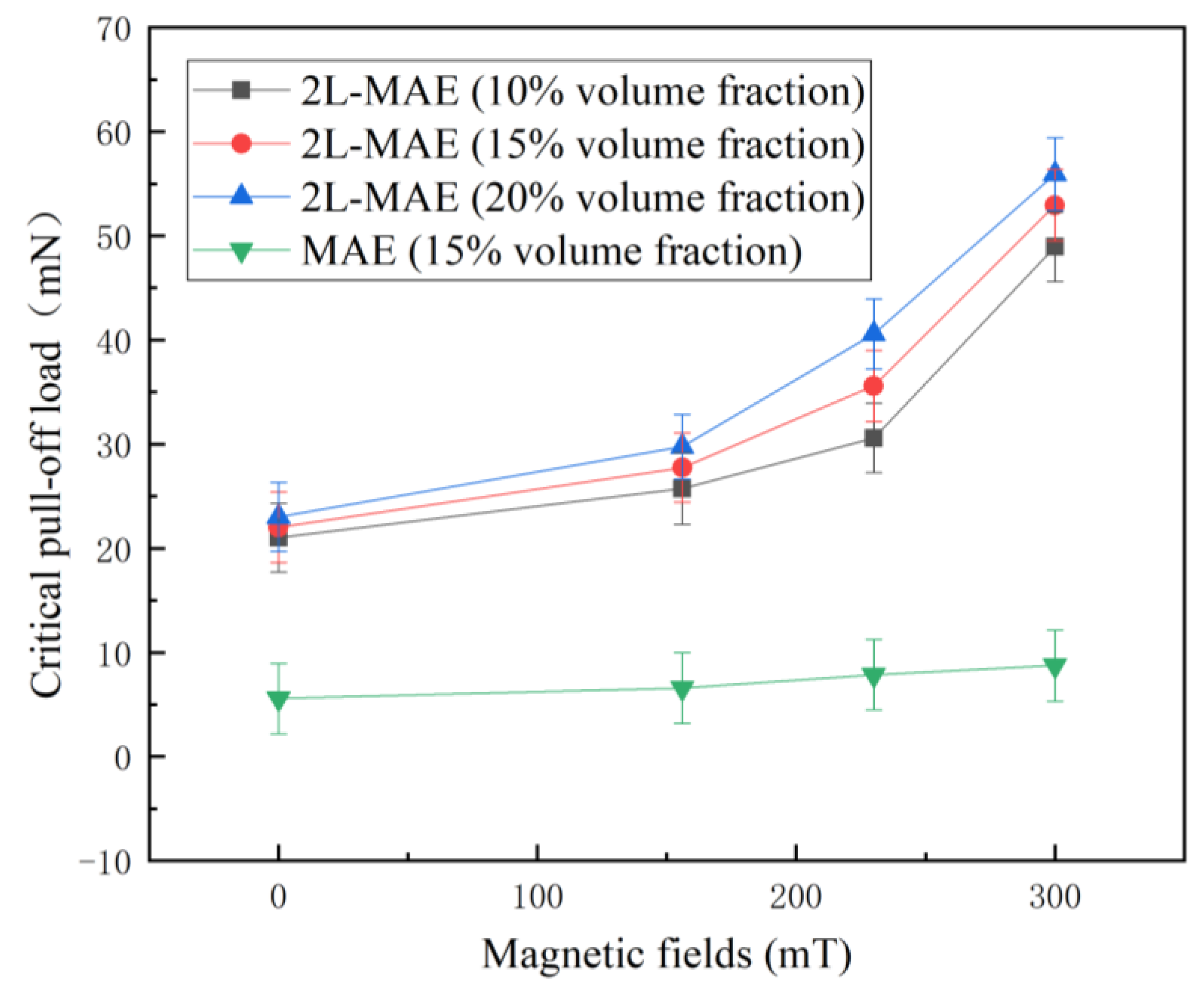
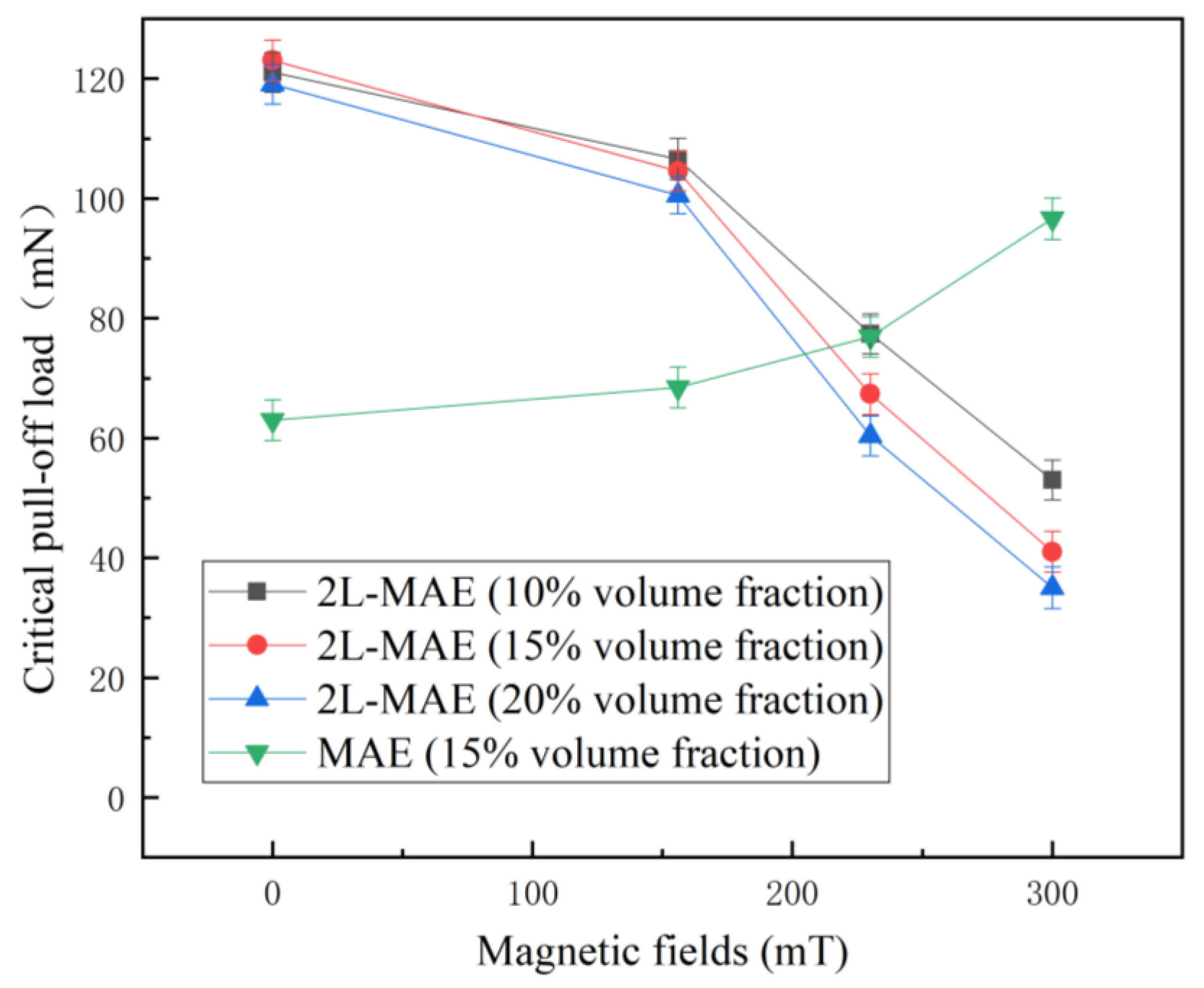
- The magnetic field can significantly affect the adhesion performance of 2L-MAE samples, and the adhesion would increase with the magnetic field on the dry (up over 165%) and wet (up over 229%) acrylic plate. Furthermore, the adhesion of 2L-MAEs would decrease with the external magnetic field and achieve a 69% reduction under 300 mT magnetic field when they are in contact with the surface of an iron sheet.
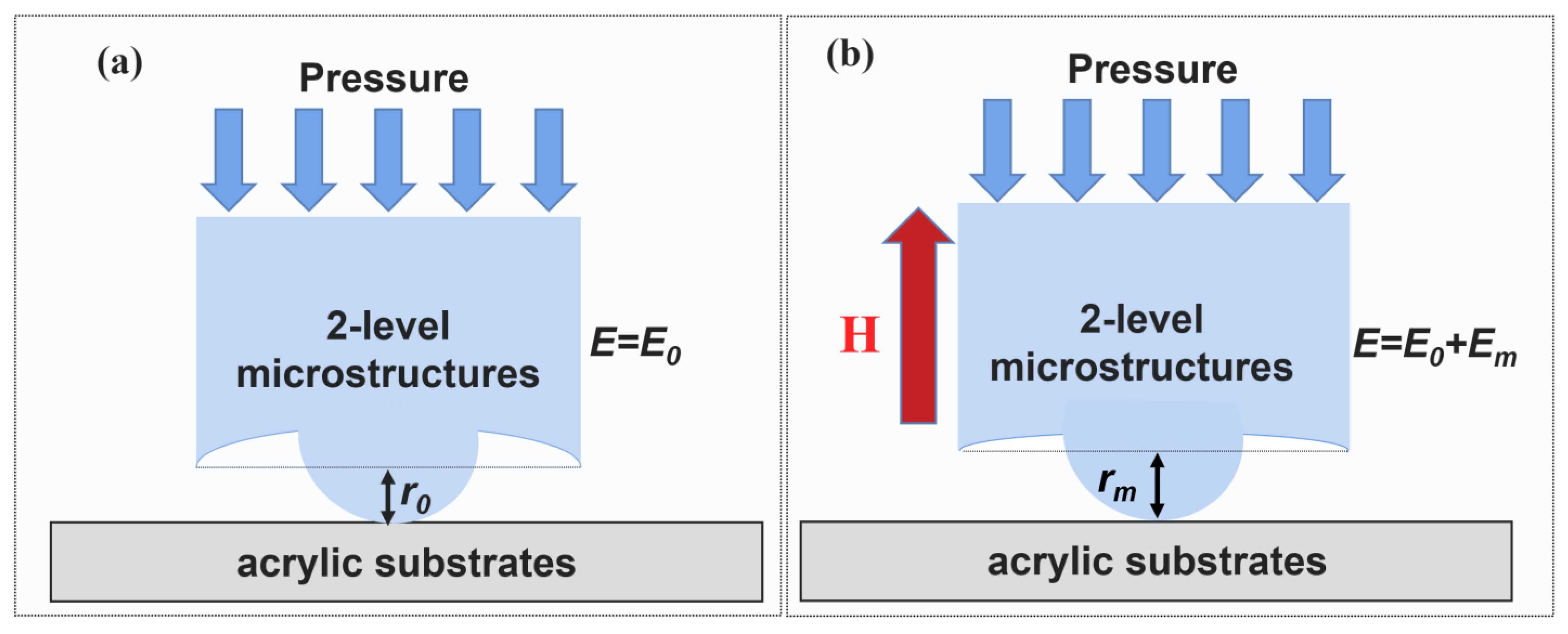
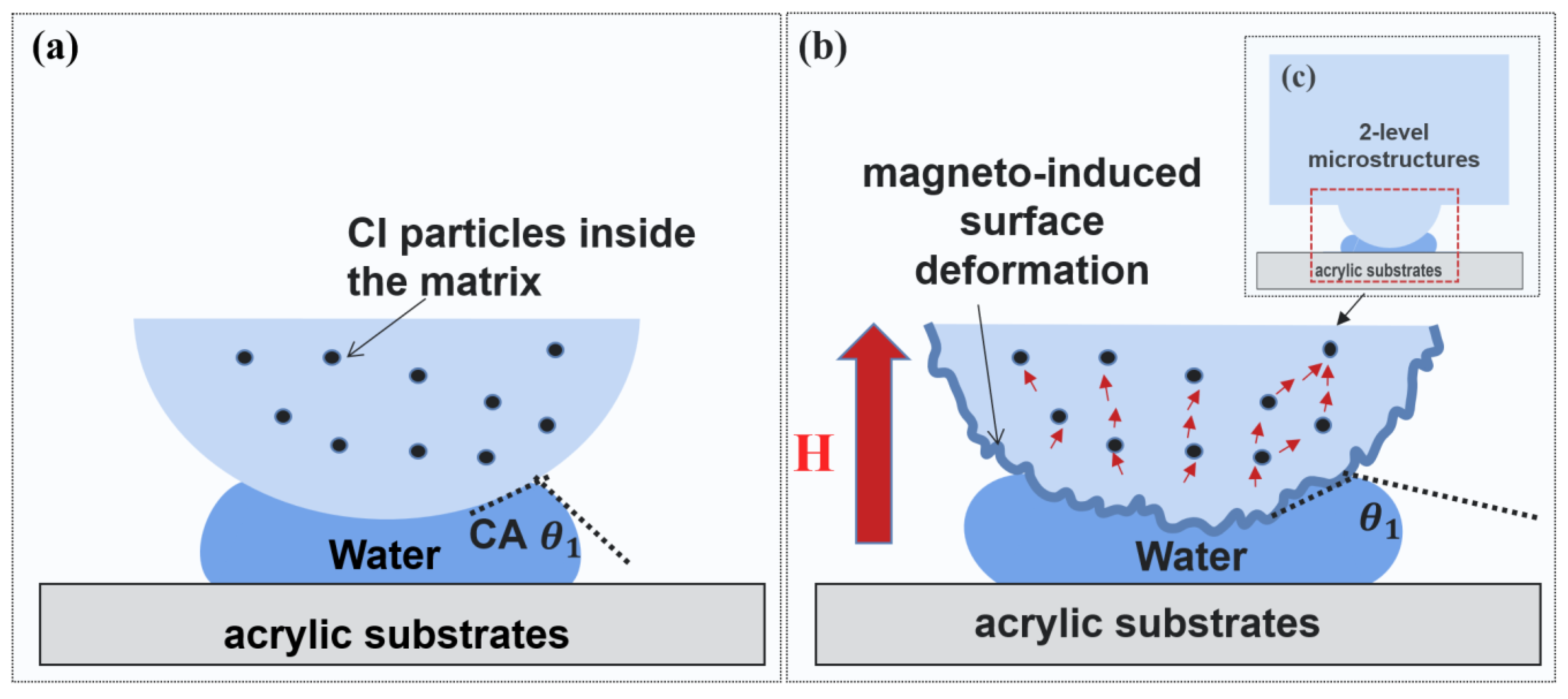
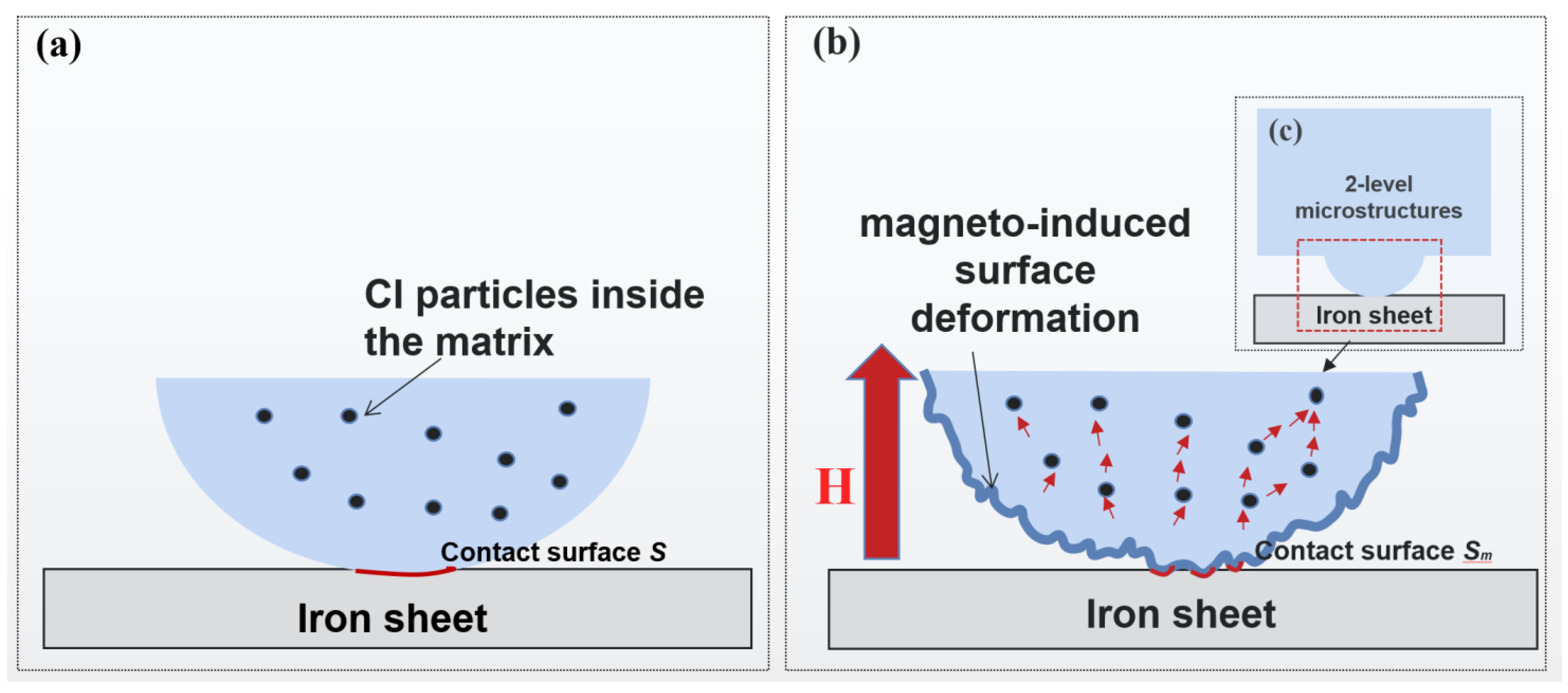
- We suggest that the Magneto-induced modulus is the main reason that the 2L-MAE could change its adhesion when it makes contact with a dry acrylic plate under a magnetic field. Moreover, the tunable adhesion properties on a wet acrylic plate and iron sheet might be caused by the magneto-induced surface deformation on the Bionic arrays.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bhushan, B. Biomimetics: Lessons from nature—An overview. Philosophical Transactions of the Royal Society A: Mathematical. Phys. Eng. Sci. 2009, 367, 1445–1486. [Google Scholar]
- Gruber, P.; Bruckner, D.; Hellmich, C.; Schmiedmayer, H.B.; Stachelberger, H.; Gebeshuber, I.C. (Eds.) Biomimetics--Materials, Structures and Processes: Examples, Ideas and Case Studies; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Persson, B.N.; Albohr, O.; Tartaglino, U.; Volokitin, A.I.; Tosatti, E. On the nature of surface roughness with application to contact mechanics, sealing, rubber friction and adhesion. J. Phys. Condens. Matter 2004, 17, R1. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Autumn, K.; Dittmore, A.; Santos, D.; Spenko, M.; Cutkosky, M. Frictional adhesion: A new angle on gecko attachment. J. Exp. Biol. 2006, 209, 3569–3579. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ba-Omar, T.A.; Downie, J.R.; Barnes, W.J.P. Development of adhesive toe-pads in the tree-frog (Phyllomedusa trinitatis). J. Zool. 2000, 250, 267–282. [Google Scholar] [CrossRef]
- Yu, J.; Chary, S.; Das, S.; Tamelier, J.; Pesika, N.S.; Turner, K.L.; Israelachvili, J.N. Gecko-inspired dry adhesive for robotic applications. Adv. Funct. Mater. 2011, 21, 3010–3018. [Google Scholar] [CrossRef]
- Tao, D.; Gao, X.; Lu, H.; Liu, Z.; Li, Y.; Tong, H.; Pesika, N.; Meng, Y.; Tian, Y. Controllable anisotropic dry adhesion in vacuum: Gecko inspired wedged surface fabricated with ultraprecision diamond cutting. Adv. Funct. Mater. 2017, 27, 1606576. [Google Scholar] [CrossRef]
- Deneke, N.; Chau, A.L.; Davis, C.S. Pressure tunable adhesion of rough elastomers. Soft Matter 2021, 17, 863–869. [Google Scholar] [CrossRef]
- Reddy, S.; Arzt, E.; del Campo, A. Bioinspired surfaces with switchable adhesion. Adv. Mater. 2007, 19, 3833–3837. [Google Scholar] [CrossRef]
- Cui, J.; Drotlef, D.-M.; Larraza, I.; Fernández-Blázquez, J.P.; Boesel, L.F.; Ohm, C.; Mezger, M.; Zentel, R.; Del Campo, A. Bioinspired actuated adhesive patterns of liquid crystalline elastomers. Adv. Mater. 2012, 24, 4601–4604. [Google Scholar] [CrossRef]
- Jeong, H.E.; Kwak, M.K.; Suh, K.Y. Stretchable, adhesion-tunable dry adhesive by surface wrinkling. Langmuir 2010, 26, 2223–2226. [Google Scholar] [CrossRef]
- Nadermann, N.; Ning, J.; Jagota, A.; Hui, C.-Y. Active switching of adhesion in a film-terminated fibrillar structure. Langmuir 2010, 26, 15464–15471. [Google Scholar] [CrossRef] [PubMed]
- Lin, P.C.; Vajpayee, S.; Jagota, A.; Hui, C.Y.; Yang, S. Mechanically tunable dry adhesive from wrinkled elastomers. Soft Matter 2008, 4, 1830–1835. [Google Scholar] [CrossRef]
- Drotlef, D.M.; Blümler, P.; del Campo, A. Magnetically actuated patterns for bioinspired reversible adhesion (dry and wet). Adv. Mater. 2014, 26, 775–779. [Google Scholar] [CrossRef] [PubMed]
- Gillies, A.G.; Kwak, J.; Fearing, R.S. Controllable particle adhesion with a magnetically actuated synthetic gecko adhesive. Adv. Funct. Mater. 2013, 23, 3256–3261. [Google Scholar] [CrossRef]
- Testa, P.; Chappuis, B.; Kistler, S.; Style, R.W.; Heyderman, L.J.; Dufresne, E.R. Switchable adhesion of soft composites induced by a magnetic field. Soft Matter 2020, 16, 5806–5811. [Google Scholar] [CrossRef] [PubMed]
- Northen, M.T.; Greiner, C.; Arzt, E.; Turner, K.L. A Gecko-inspired reversible adhesive. Adv. Mater. 2008, 20, 3905–3909. [Google Scholar] [CrossRef]
- Ewoldt, R.H.; Tourkine, P.; McKinley, G.H.; Hosoi, A.E. Controllable adhesion using field-activated fluids. Phys. Fluids 2011, 23, 073104. [Google Scholar] [CrossRef] [Green Version]
- Hussein, M.; Renner, M.; Watanabe, M.; Iagnemma, K. Matching of ground-based LiDAR and aerial image data for mobile robot localization in densely forested environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, Tokyo, Japan, 3–7 November 2013. [Google Scholar]
- Chu, G.; Wang, X.; Chen, T.; Gao, J.; Gai, F.; Wang, Y.; Xu, Y. Optically tunable chiral plasmonic guest–host cellulose films weaved with long-range ordered silver nanowires. ACS Appl. Mater. Interfaces 2015, 7, 11863–11870. [Google Scholar] [CrossRef]
- Risan, J.; Croll, A.B.; Azarmi, F. Compliance switching for adhesion control. J. Polym. Sci. Part B Polym. Phys. 2015, 53, 48–57. [Google Scholar] [CrossRef]
- Kravanja, G.; Belyaeva, I.A.; Hribar, L.; Drevenšek-Olenik, I.; Shamonin, M.; Jezeršek, M. Laser Micromachining of Magnetoactive Elastomers as Enabling Technology for Magnetoresponsive Surfaces. Adv. Mater. Technol. 2022, 7, 2101045. [Google Scholar] [CrossRef]
- Kriegl, R.; Kravanja, G.; Hribar, L.; Čoga, L.; Drevenšek-Olenik, I.; Jezeršek, M.; Kalin, M.; Shamonin, M. Microstructured Magnetoactive Elastomers for Switchable Wettability. Polymers 2022, 14, 3883. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Zhu, M.; Zhang, Y.; Dong, S.; Wang, X. Magnetic-responsive superhydrophobic surface of magnetorheological elastomers mimicking from lotus leaves to rose petals. Langmuir 2021, 37, 2312–2321. [Google Scholar] [CrossRef] [PubMed]
- Yang, C.; Wu, L.; Li, G. Magnetically responsive superhydrophobic surface: In situ reversible switching of water droplet wettability and adhesion for droplet manipulation. ACS Appl. Mater. Interfaces 2018, 10, 20150–20158. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Yim, C.; Kim, W.; Jeon, S. Magnetorheological elastomer films with tunable wetting and adhesion properties. ACS Appl. Mater. Interfaces 2015, 7, 19853–19856. [Google Scholar] [CrossRef]
- Jiang, S.; Hu, Y.; Wu, H.; Li, R.; Zhang, Y.; Chen, C.; Xue, C.; Xu, B.; Zhu, W.; Li, J. Three-dimensional multifunctional magnetically responsive liquid manipulator fabricated by femtosecond laser writing and soft transfer. Nano Lett. 2020, 20, 7519–7529. [Google Scholar] [CrossRef]
- Huang, W.; Wang, X. Biomimetic design of elastomer surface pattern for friction control under wet conditions. Bioinspiration Biomim. 2013, 8, 046001. [Google Scholar] [CrossRef] [Green Version]
- Yu, H.; Jia, H.; Gong, L.; Li, R.; Wang, C.; Wang, X. Static friction of biomimetic surface microstructure of PDMS under wet and dry conditions. In Bioinspiration, Biomimetics, and Bioreplication 2016; SPIE: Las Vegas, NV, USA, 2016; Volume 9797, pp. 187–199. [Google Scholar]
- Bradley, R.S. LXXIX. The cohesive force between solid surfaces and the surface energy of solids. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1932, 13, 853–862. [Google Scholar] [CrossRef]
- Chen, S.W.; Li, R.; Zhang, Z.; Wang, X.J. Micromechanical analysis on tensile modulus of structured magneto-rheological elastomer. Smart Mater. Struct. 2016, 25, 035001. [Google Scholar] [CrossRef]
- Varga, Z.; Filipcsei, G.; Zrínyi, M. Magnetic field sensitive functional elastomers with tuneable elastic modulus. Polymer 2006, 47, 227–233. [Google Scholar] [CrossRef]
- Kovalev, A.; Belyaeva, I.A.; von Hofen, C.; Gorb, S.; Shamonin, M. Magnetically switchable adhesion and friction of soft magnetoactive elastomers. Adv. Eng. Mater. 2022, 24, 2200372. [Google Scholar] [CrossRef]
- Gladkyy, A.; Schwarze, R. Comparison of different capillary bridge models for application in the discrete element method. Granul. Matter 2014, 16, 911–920. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Li, R.; Li, X.; Wang, X. Magnetic field induced surface micro-deformation of magnetorheological elastomers for roughness control. Front. Mater. 2018, 5, 76. [Google Scholar] [CrossRef]
- Lee, D.W.; Lee, K.; Lee, C.H.; Kim, C.H.; Cho, W.O. A study on the tribological characteristics of a magneto-rheological elastomer. J. Tribol. 2013, 135, 014501. [Google Scholar] [CrossRef]
- Lian, C.; Lee, K.H.; Lee, C.H. Friction and wear characteristics of magnetorheological elastomer under vibration conditions. Tribol. Int. 2016, 98, 292–298. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Qian, Z.; Fu, X.; Wu, X. Magnetically Tunable Adhesion of Magnetoactive Elastomers’ Surface Covered with Two-Level Newt-Inspired Microstructures. Biomimetics 2022, 7, 245. https://doi.org/10.3390/biomimetics7040245
Chen S, Qian Z, Fu X, Wu X. Magnetically Tunable Adhesion of Magnetoactive Elastomers’ Surface Covered with Two-Level Newt-Inspired Microstructures. Biomimetics. 2022; 7(4):245. https://doi.org/10.3390/biomimetics7040245
Chicago/Turabian StyleChen, Shiwei, Ziyuan Qian, Xiaojiao Fu, and Xuan Wu. 2022. "Magnetically Tunable Adhesion of Magnetoactive Elastomers’ Surface Covered with Two-Level Newt-Inspired Microstructures" Biomimetics 7, no. 4: 245. https://doi.org/10.3390/biomimetics7040245
APA StyleChen, S., Qian, Z., Fu, X., & Wu, X. (2022). Magnetically Tunable Adhesion of Magnetoactive Elastomers’ Surface Covered with Two-Level Newt-Inspired Microstructures. Biomimetics, 7(4), 245. https://doi.org/10.3390/biomimetics7040245