
Biomimetic Design of Turbine Blades for Ocean Current Power Generation


Abstract
:1. Introduction
2. Materials and Methods
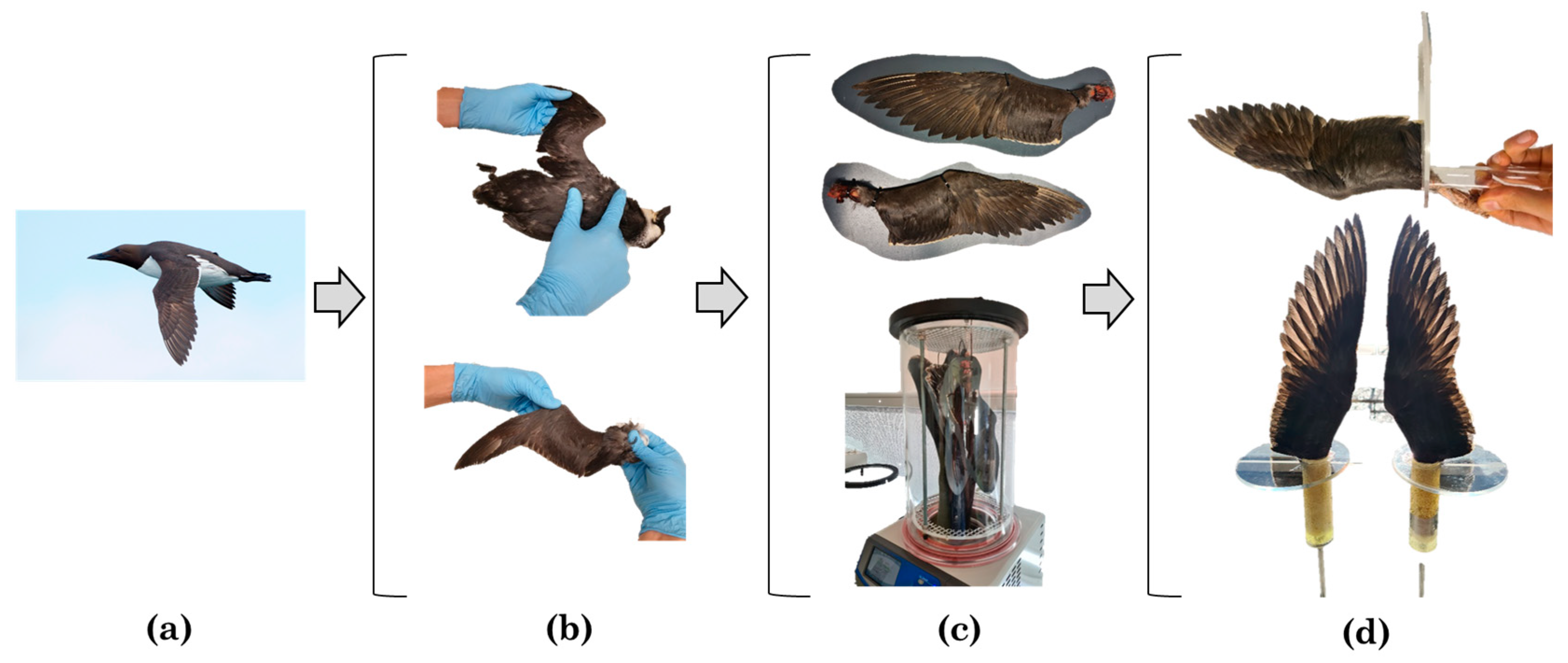
2.1. Preparation of the Wing
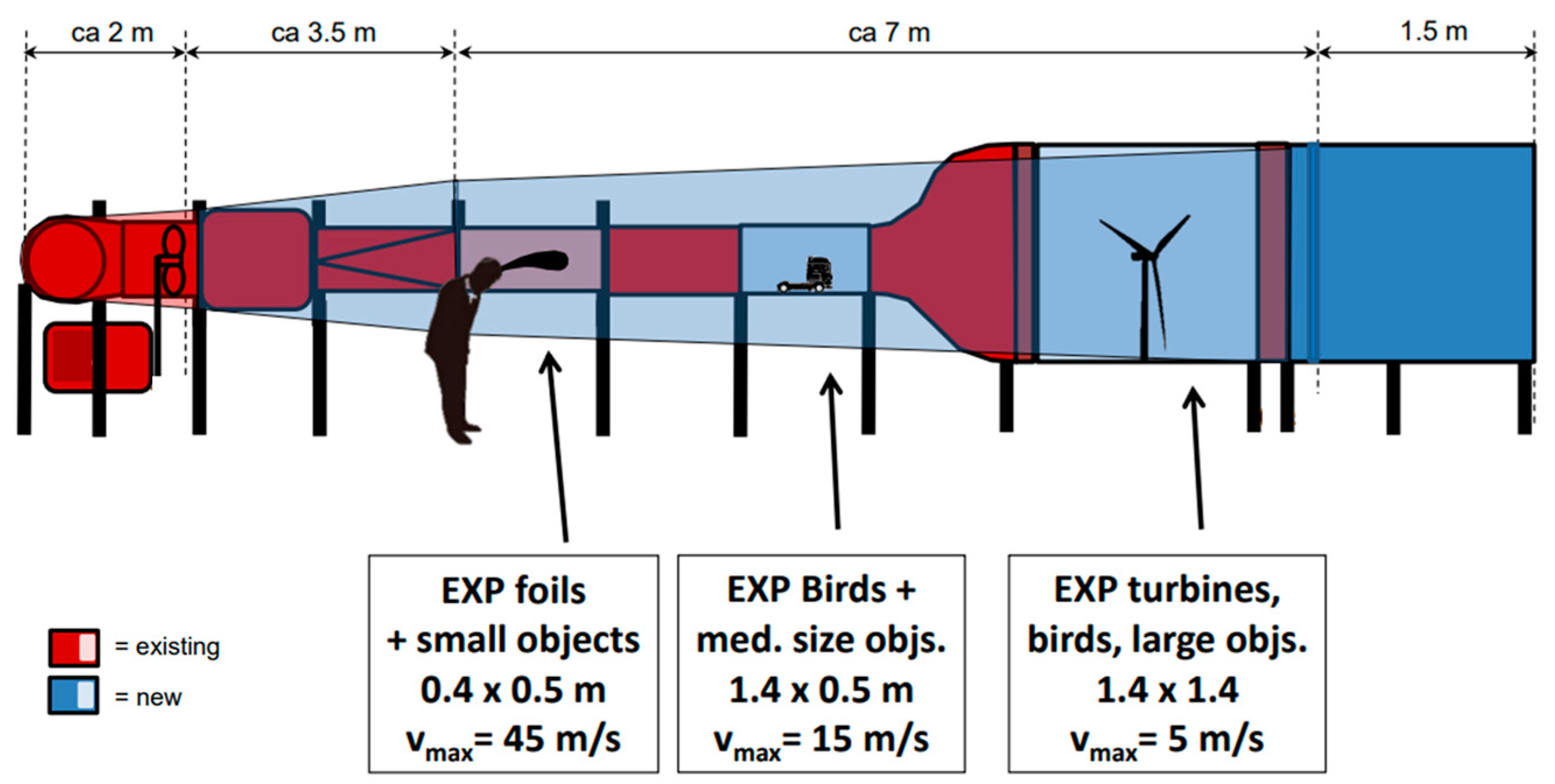
2.2. Wind tunnel Measurements
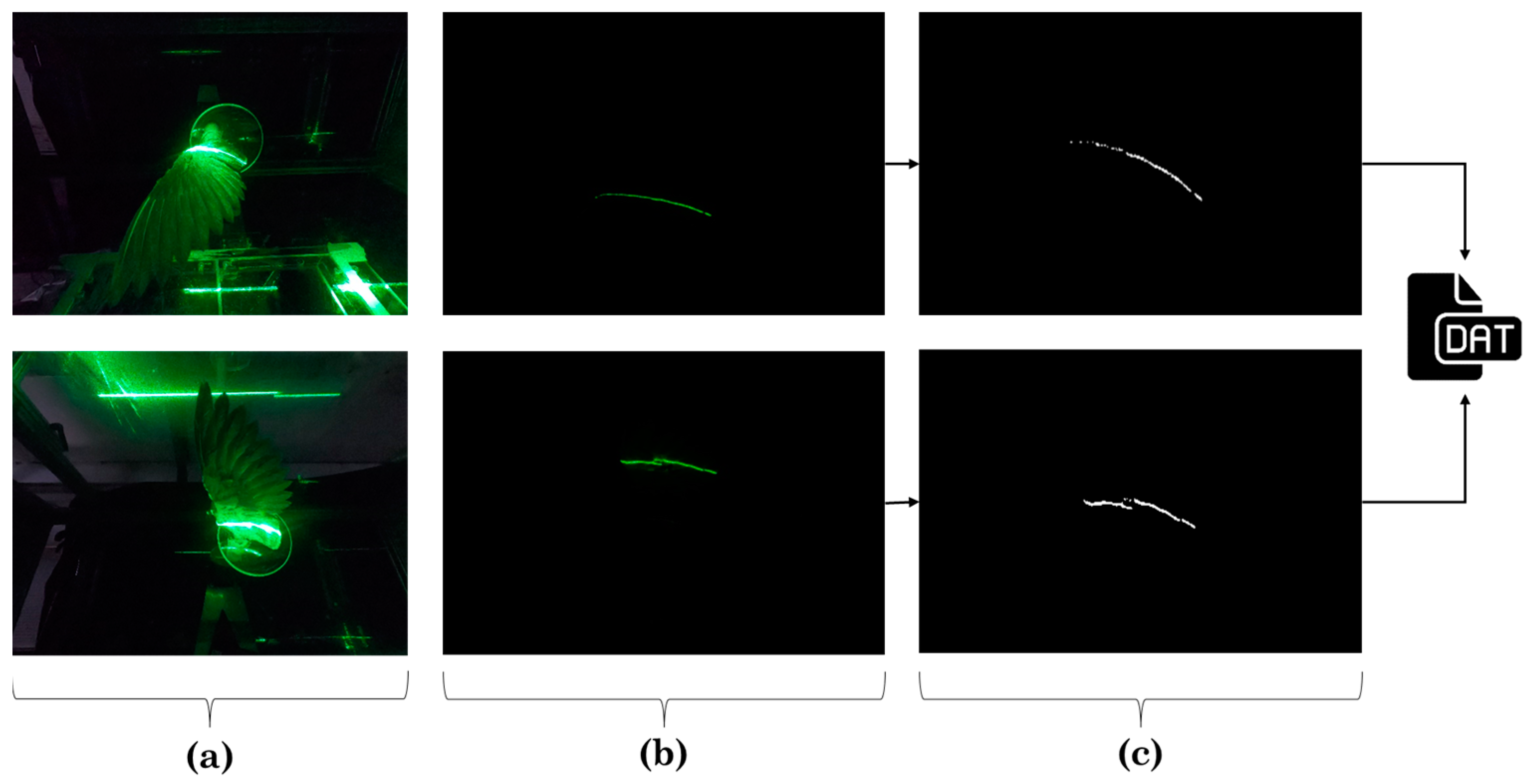
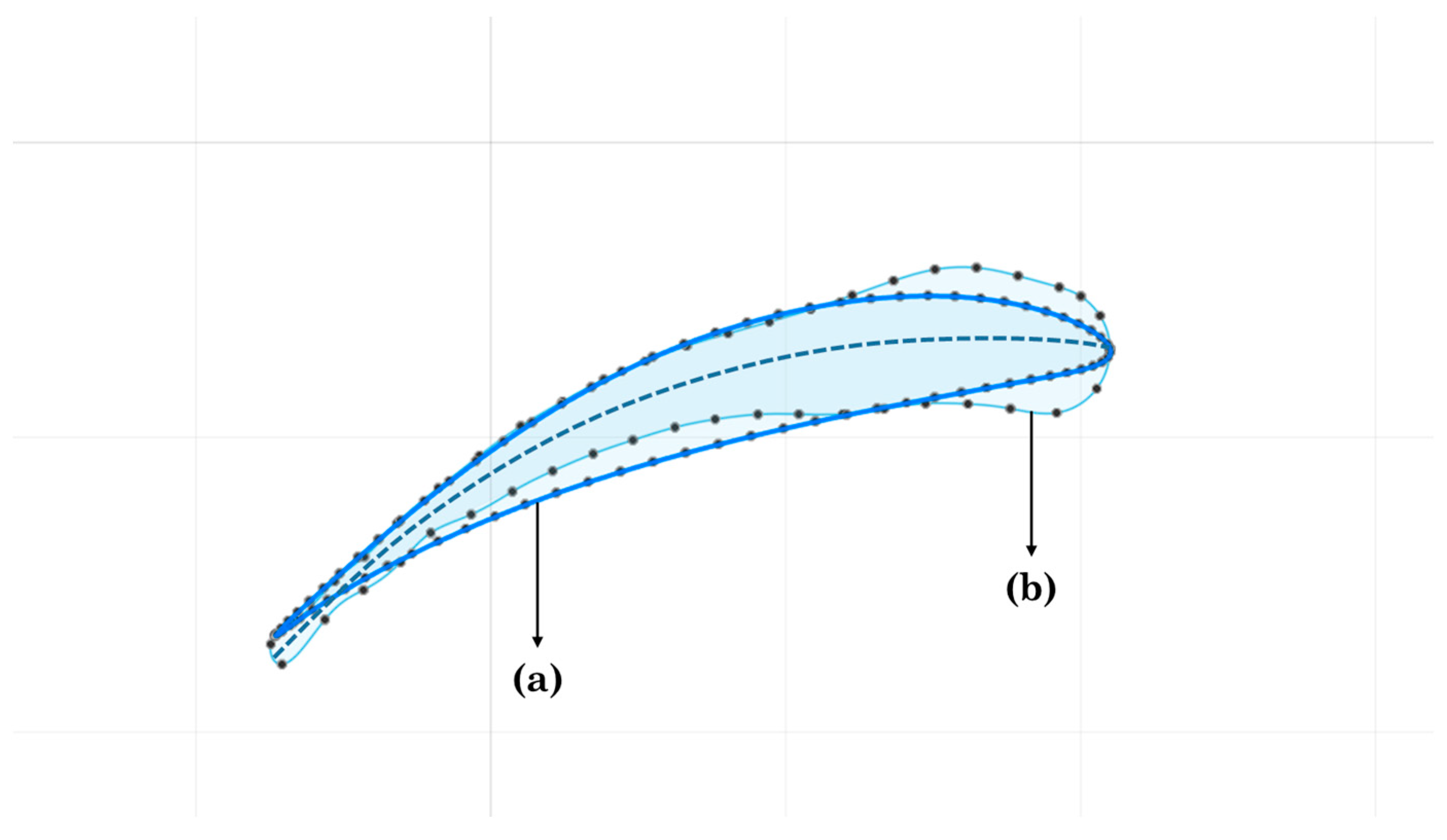
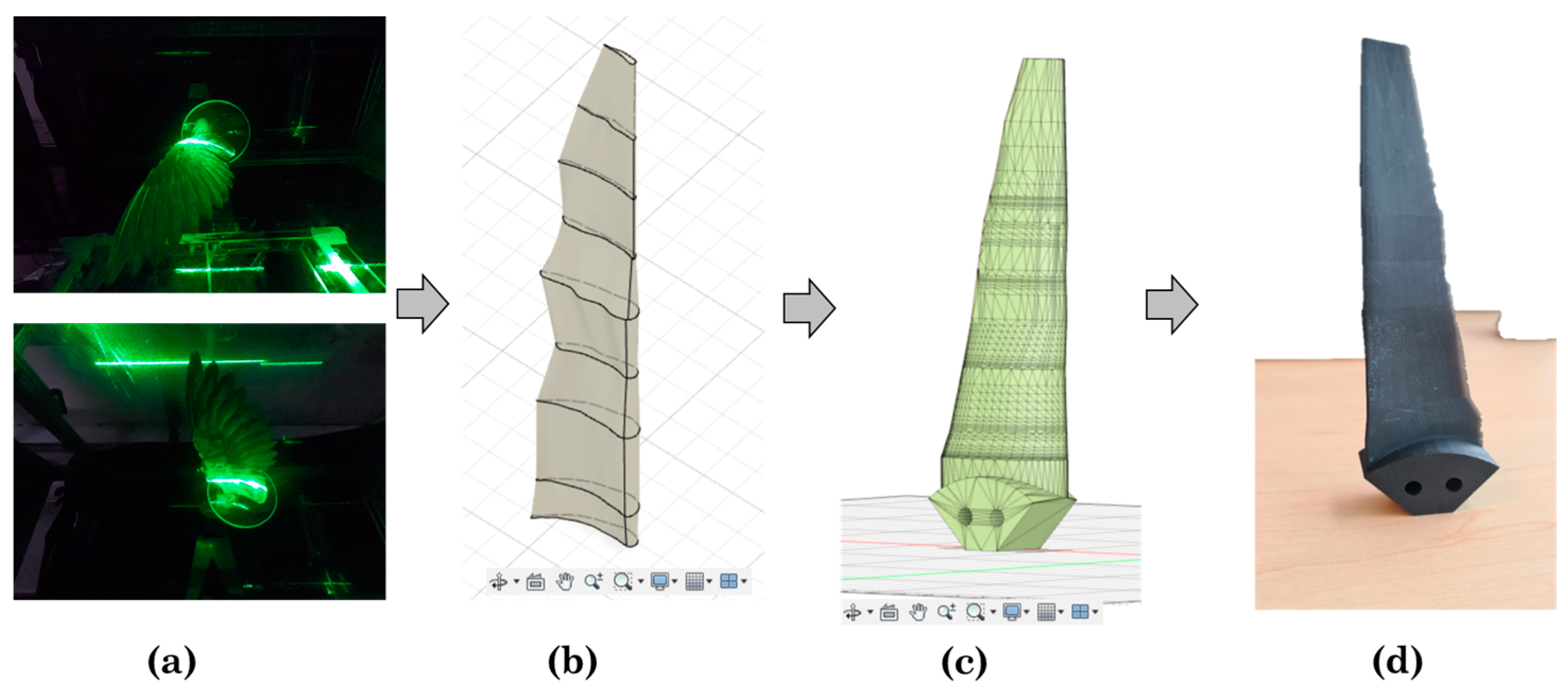
2.3. Deriving a Turbine Blade from Bird Wing Profiles
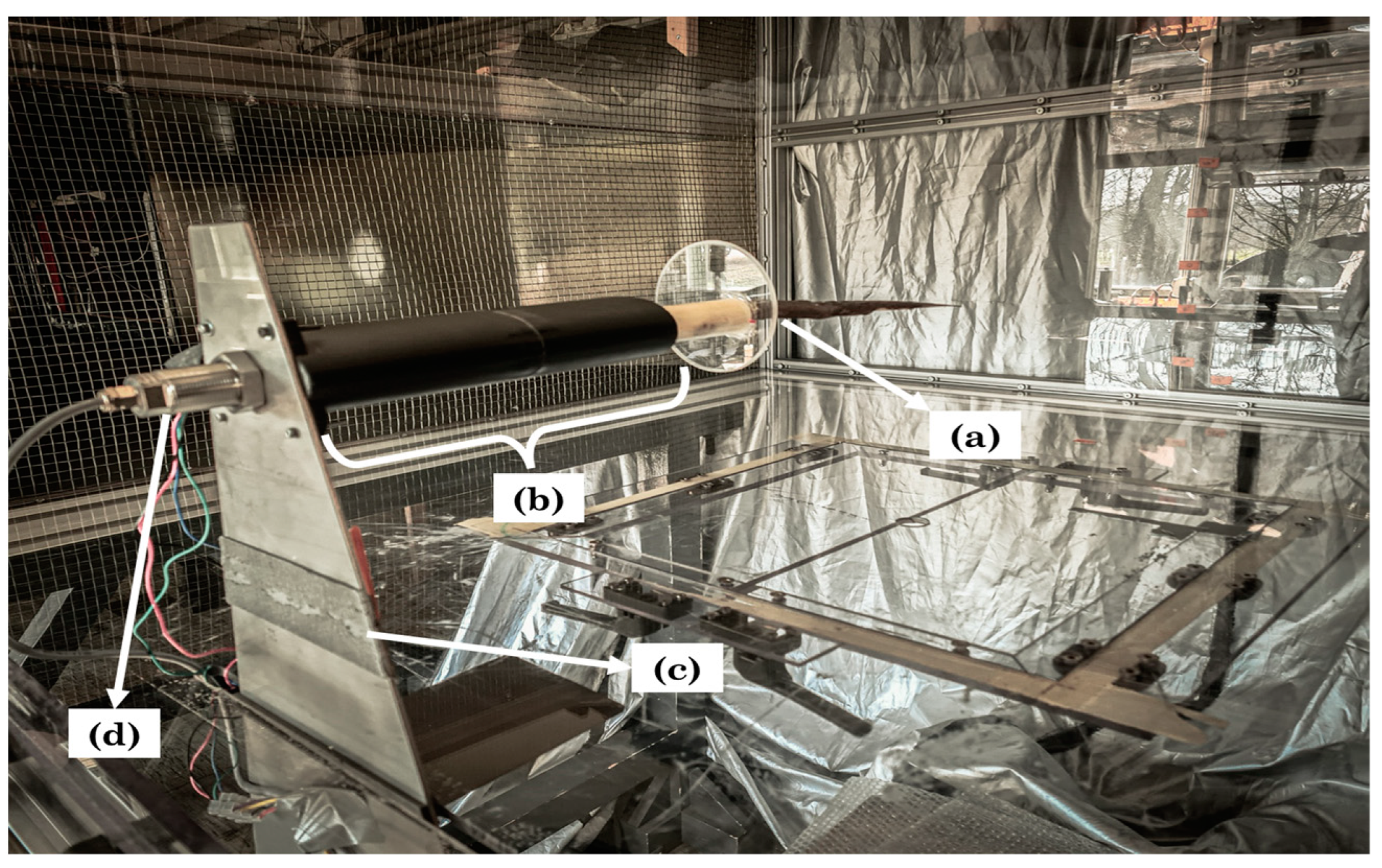
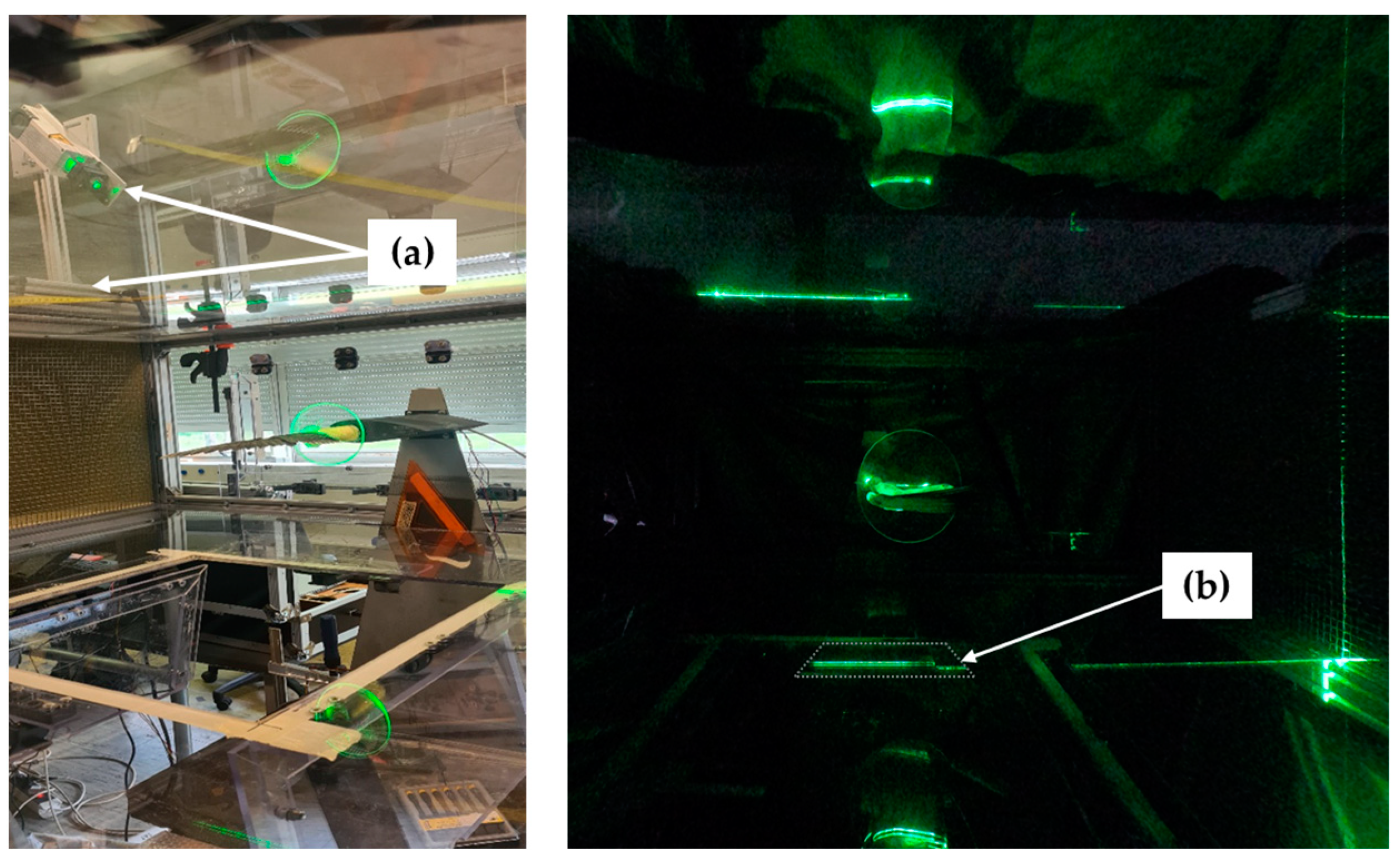
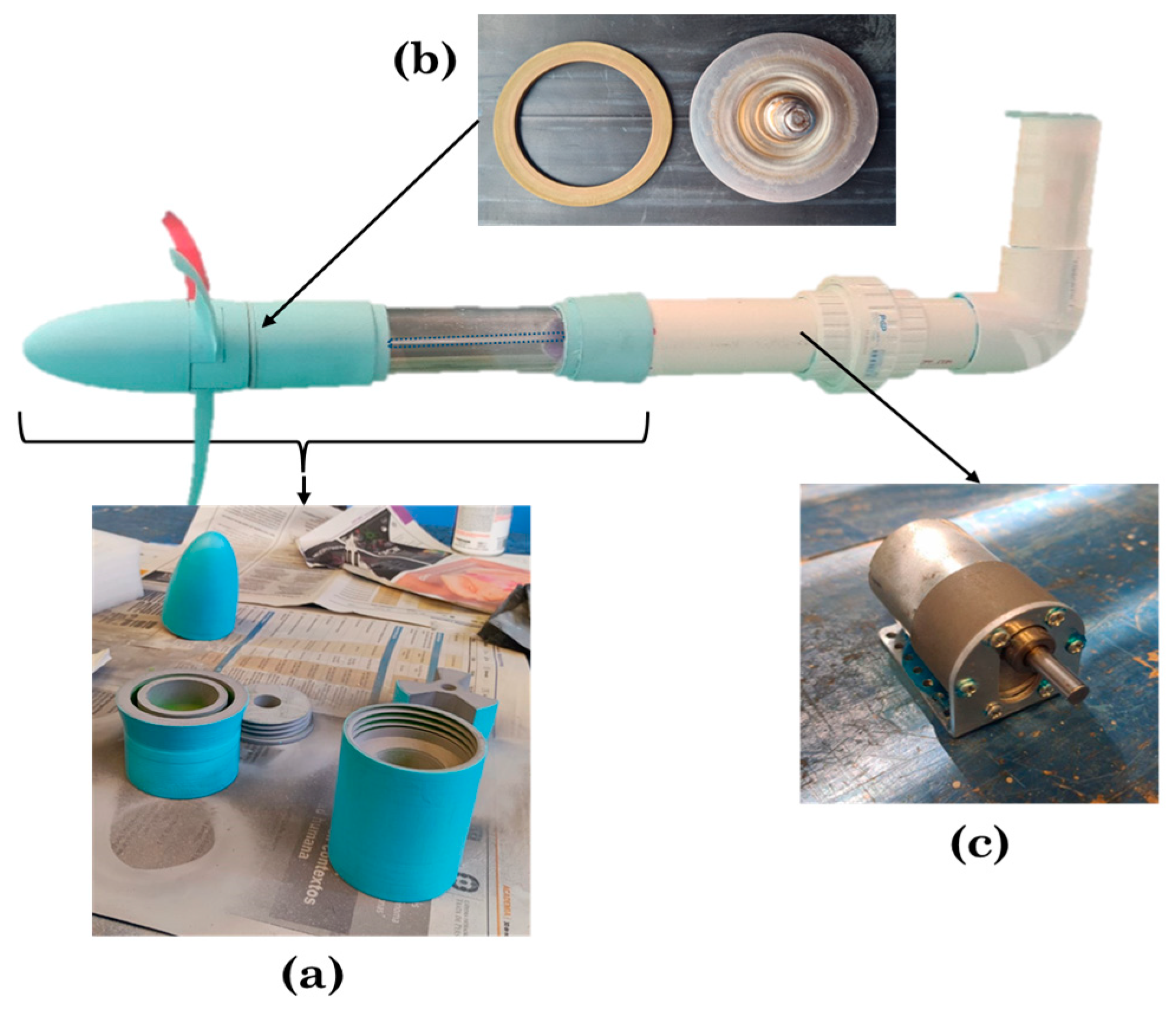
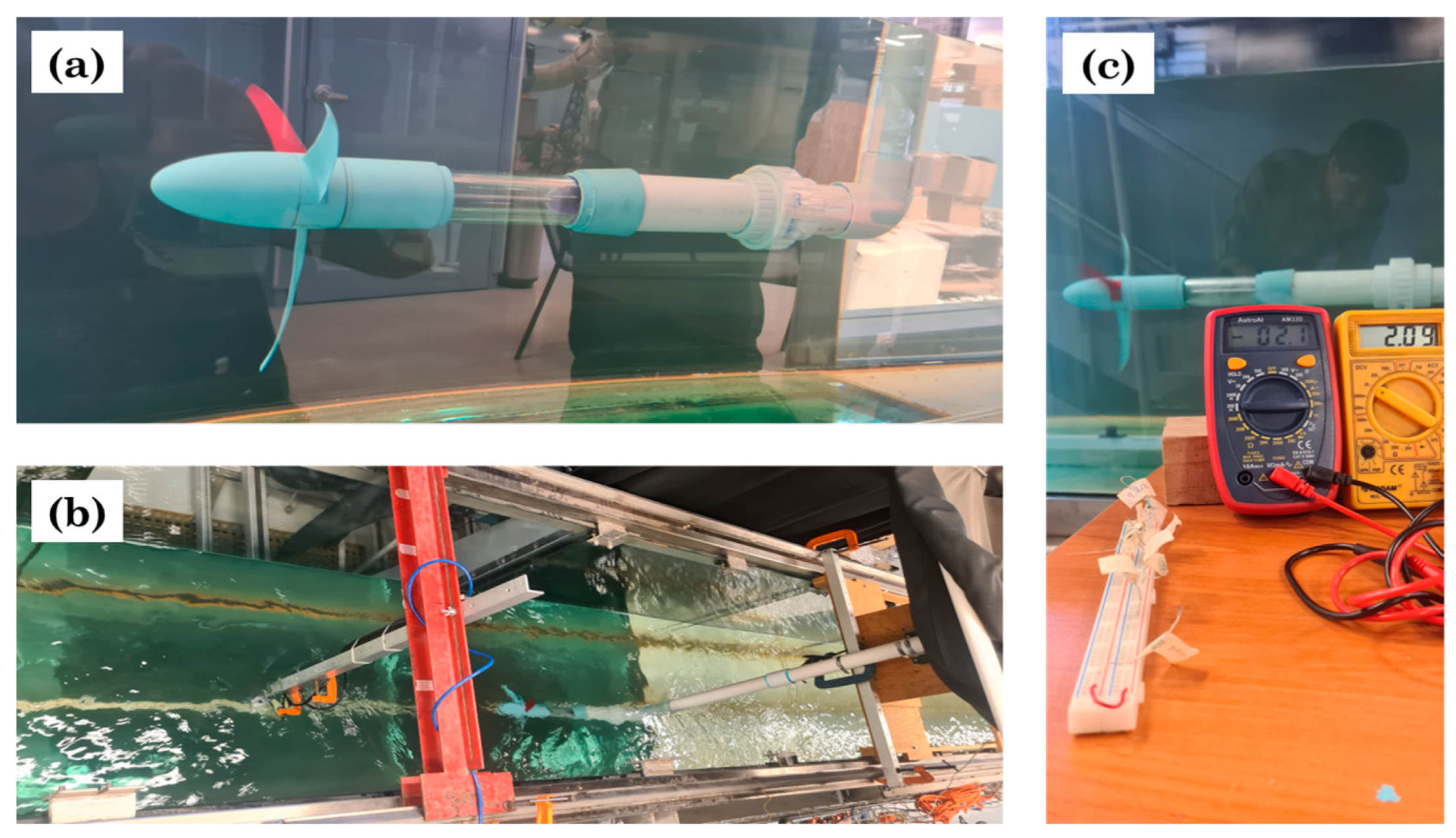
2.4. Flow Tank Measurements
3. Results
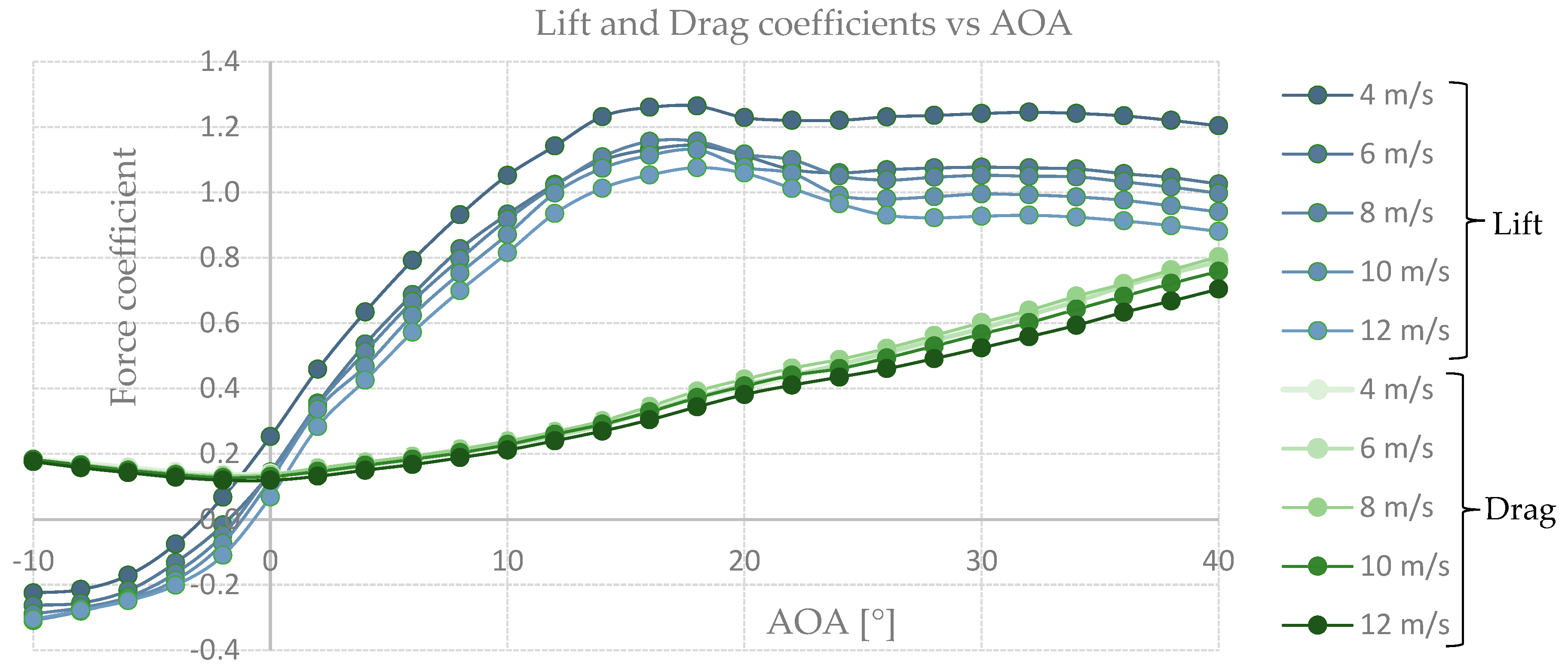
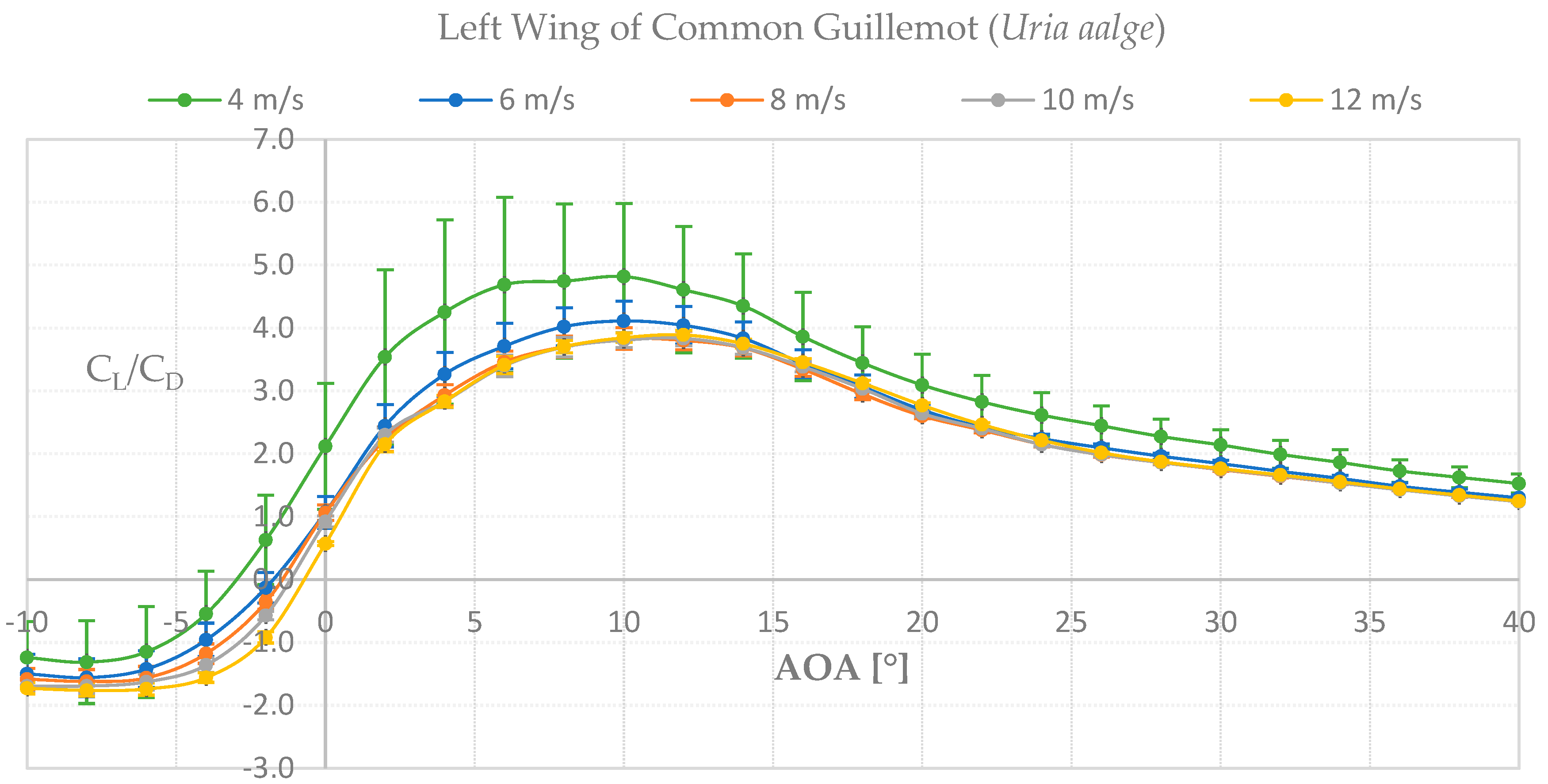
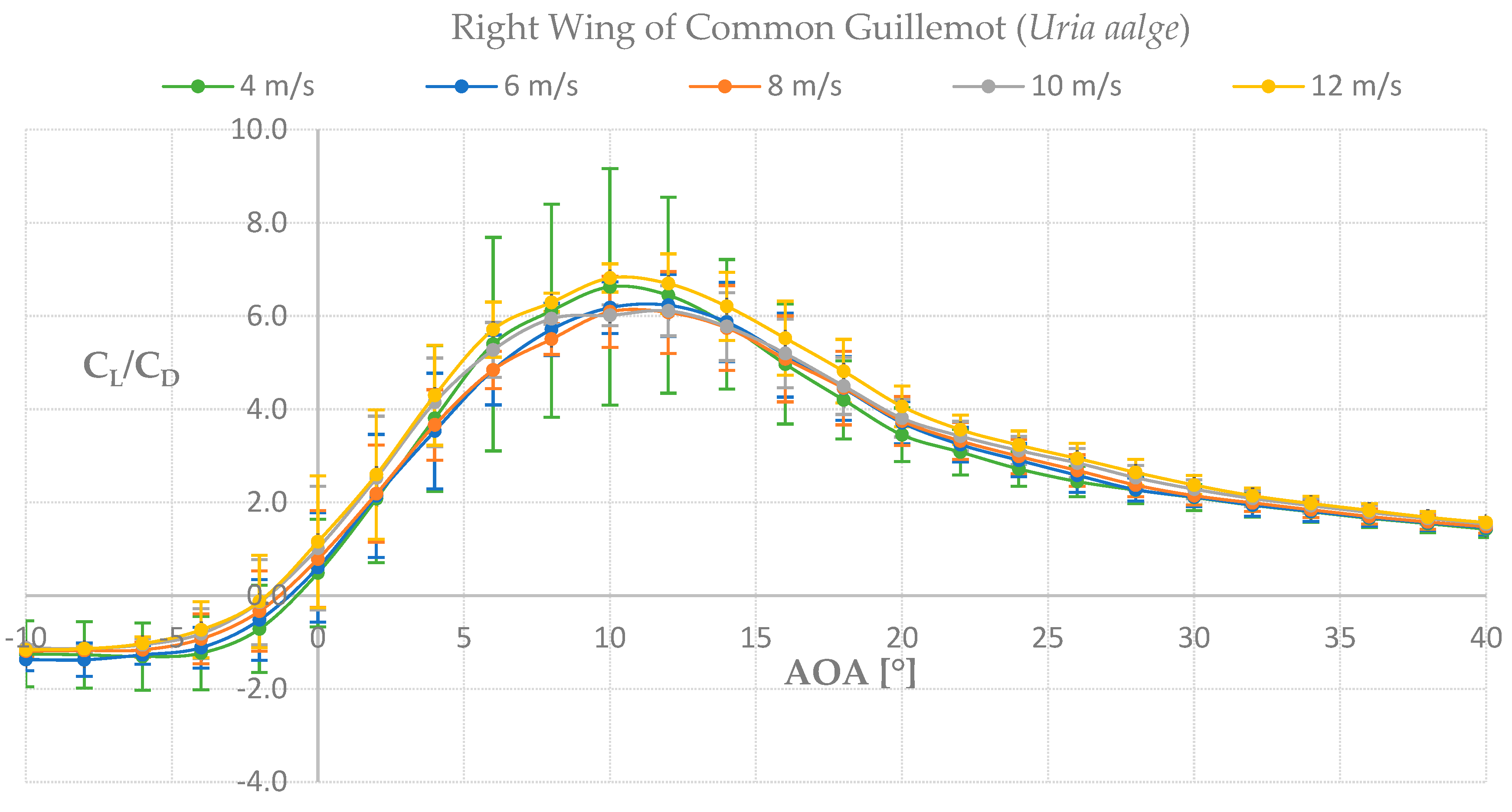
3.1. Wind Tunnel Results
3.2. Bio-Inspired Blade Results
3.3. Flow Tank Results
4. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Agency, I.E. Energy Technology Perspectives 2020; OECD: Paris, France, 2020. [Google Scholar]
- Agency, I.E. Solar PV Report. Available online: https://www.iea.org/reports/solar-pv (accessed on 7 February 2023).
- Agency, I.E. Wind Electicity Report. Available online: https://www.iea.org/reports/wind-electricity (accessed on 7 February 2023).
- Martínez, M.L.; Vázquez, G.; Pérez-Maqueo, O.; Silva, R.; Moreno-Casasola, P.; Mendoza-González, G.; López-Portillo, J.; MacGregor-Fors, I.; Heckel, G.; Hernández-Santana, J.R. A systematic view of potential environmental impacts of ocean energy production. Renew. Sustain. Energy Rev. 2021, 149, 111332. [Google Scholar] [CrossRef]
- Alcérreca-Huerta, J.C.; Encarnacion, J.I.; Ordoñez-Sánchez, S.; Callejas-Jiménez, M.; Barroso, G.G.D.; Allmark, M.; Mariño-Tapia, I.; Casarín, R.S.; O’Doherty, T.; Johnstone, C.; et al. Energy Yield Assessment from Ocean Currents in the Insular Shelf of Cozumel Island. Mar. Sci. Eng. 2019, 7, 147. [Google Scholar] [CrossRef] [Green Version]
- Laws, N.D.; Epps, B.P. Hidrokinetic energy conversion: Technology, research and outlook. Renew. Sustain. Energy Rev. 2016, 57, 1245–1259. [Google Scholar] [CrossRef] [Green Version]
- Alcérreca-Huerta, J.C.; Encarnacion, J.I.; Ordoñez-Sánchez, S.; Callejas-Jiménez, M.; Gallegos Diez Barroso, G.; Allmark, M.; Mariño-Tapia, I.; Silva Casarín, R.; O’Doherty, T.; Johnstone, C. Potential of oceanic currents for manrine renewable energy at the Cozume Channel in the Mexican Caribbean. Mar. Sci. Eng. 2019, 7, 147. [Google Scholar]
- Ikeda, T.; Tanaka, H.; Yoshimura, R.; Noda, R.; Fujii, T.; Liu, H. A robust biomimetic blade desing for micro wind turbines. Renew. Energy 2018, 125, 155–165. [Google Scholar] [CrossRef]
- Tian, W.; Yang, Z.; Zhang, Q.; Wang, J.; Li, M.; Ma, Y.; Cong, Q. Bionic Design of Wind Turbine Blade Based on Long-Eared Owl’s Airfoil. Appl. Bionics Biomech. 2017, 2017, 8504638. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Top, L. Biomimetic Blade Profile Shapes for Efficient Small Urban Wind Turbines. Master’s Thesis, University of Groningen, Groningen, The Netherlands, 2022. [Google Scholar]
- Zeisberger, V.M. Derive New Profile Shapes for Efficient Smal Urban Wind Turbines—A Biomimetic Approach. Master’ Thesis, University of Groningen, Groningen, The Netherlands, 2021. [Google Scholar]
- Kolvart, M. New Blade Profile Shapes for Small Urban Wind Turbines Applications. Master’s Thesis, University of Groningen, Groningen, The Netherlands, 2021. [Google Scholar]
- Walsum, T.A.v. Penguin Flipper Hydrodynamics. Master’s Thesis, University of Groningen, Groningen, The Netherlands, 2013. [Google Scholar]
- Ainley, D.G.; Nettleship, D.N.; Storey, A.E. Common Murre (Uria Aalge). Available online: https://birdsoftheworld.org/bow/species/commur/2.0/introduction (accessed on 23 October 2022).
- Shoffner, A.V.; Brittingham, M.C. Freeze-Drying to Preserve Birds for Teaching Collections. Northeast. Nat. 2013, 20, 441–450. [Google Scholar] [CrossRef]
- Stamhuis, E.J. Three-Stage Closed-Circuit Wind Tunnel @ESRIG. Available online: https://testfacilities.eu/listings/windtunnel/#prettyPhoto (accessed on 14 November 2022).
- GmbH, I.E. Honigmann. Available online: https://honigmann.com/i14/Tensiotron-TS621-Strain-gage-amplifier.html&lang=2 (accessed on 15 January 2023).
- Airfoil Selection: Understanding and Choosing Airfoils for Light Aircraft. Available online: https://docplayer.net/208041400-Airfoil-selection-understanding-and-choosing-airfoils-for-light-aircraft-by-barnaby-wainfan.html (accessed on 18 January 2023).
- Lentink, D.; de Kat, R. Gliding Swifts Attain Laminar Flow over Rough Wings. PLoS ONE 2014, 9, e99901. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dvorák, R. Aerodynamic of bird flight. EDP Sci. 2016, 114, 01001. [Google Scholar]
- Hastie, T.; Tibshirani, R. Generalized Additive Models. Stat. Sci. 1986, 1, 297–310. [Google Scholar] [CrossRef]
- Final report of IEA Wind Task 29 Mexnext (Phase 3). Available online: file:///C:/Users/MDPI/Downloads/e18003.pdf (accessed on 18 January 2023).
- www.windandwet.com. Airfoil Tools. Available online: http://airfoiltools.com/ (accessed on 25 July 2022).
- Instituto de Ingeniería, U. Laboratorio de Costas y Puertos, IINGEN, UNAM. Available online: http://www.ii.unam.mx/es-mx/Investigacion/Capacidades-Experimentales/Costas-y-puertos/Paginas/default.aspx (accessed on 18 November 2022).
- Sudhamshu, A.R.; Pandey, M.C.; Sunil, N.; Satish, N.S.; Mugundhan, V.; Velamati, R.K. Numerical study of effect of pitch angle on performance characteristics of a HAWT. Eng. Sci. Technol. 2014, 19, 632–641. [Google Scholar]
- Thumthae, C.; Chitsomboon, T. Optimal angle of attack for untwisted blade wind turbine. Renew. Energy 2008, 34, 1279–1284. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Weight R-Wing [g] | Weight L-Wing [g] | |
|---|---|---|
| Initial wing mass | 21.19 | 20.65 |
| Wing mass after 12 days | 10.68 | 10.15 |
| Mass Loss [%] | 50.4 | 49.1 |
| Profile ID | Airfoil | Distance from Base [cm] | Twist [°] |
|---|---|---|---|
| 1 | CH10 | 0 | 12 |
| 2 | CH10 | 3 | 12 |
| 3 | CH10 | 5.5 | 10 |
| 4 | NACA–4412 | 8.5 | 8 |
| 5 | NACA–4412 | 11.5 | 6 |
| 6 | NACA–4412 | 14.5 | 4 |
| 7 | DGA1138 | 17.5 | 3 |
| 8 | DGA1138 | 20.5 | 1 |
| 9 | DGA1138 | 24.3 | 0 |
| Flow Speed [m/s] | Tip Speed Ratio [TSR] | |
|---|---|---|
| 0.37–0.39 | 0.17 ± 0.06 | 3.3 ± 0.25 |
| 0.42–0.44 | 0.20 ± 0.08 | 3.2 ± 0.11 |
| 0.51–0.54 | 0.24 ± 0.05 | 3.4 ± 0.29 |
| Mean values | 0.2 | 3.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hernández Montoya, E.E.; Mendoza, E.; Stamhuis, E.J. Biomimetic Design of Turbine Blades for Ocean Current Power Generation. Biomimetics 2023, 8, 118. https://doi.org/10.3390/biomimetics8010118
Hernández Montoya EE, Mendoza E, Stamhuis EJ. Biomimetic Design of Turbine Blades for Ocean Current Power Generation. Biomimetics. 2023; 8(1):118. https://doi.org/10.3390/biomimetics8010118
Chicago/Turabian StyleHernández Montoya, Enrique Eduardo, Edgar Mendoza, and Eize J. Stamhuis. 2023. "Biomimetic Design of Turbine Blades for Ocean Current Power Generation" Biomimetics 8, no. 1: 118. https://doi.org/10.3390/biomimetics8010118
APA StyleHernández Montoya, E. E., Mendoza, E., & Stamhuis, E. J. (2023). Biomimetic Design of Turbine Blades for Ocean Current Power Generation. Biomimetics, 8(1), 118. https://doi.org/10.3390/biomimetics8010118