
Modeling and Analysis of a Reconfigurable Rover for Improved Traversing over Soft Sloped Terrains

Abstract
:1. Introduction
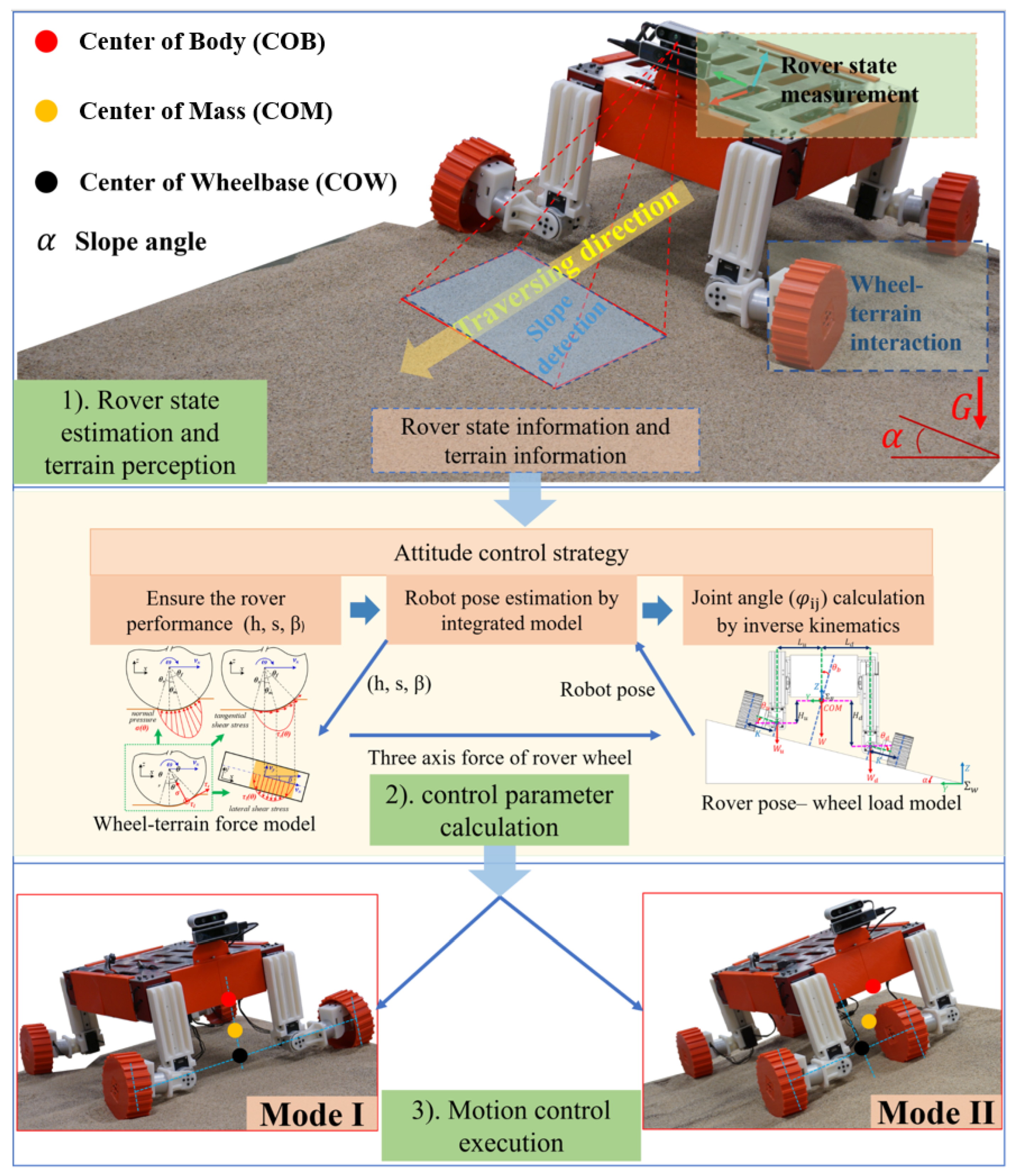
- An actively reconfigurable rover design with a two-level adjustment mechanism is provided, and one of the mechanisms is a bionic structure that can adjust the contact angle. In addition, an integrated model based on pose and slippage parameters is introduced.
- An attitude control strategy for slope traversing based on particle swarm optimization (PSO) algorithm is provided. Based on this strategy, the rover can successfully traverse slopes under constraints ( & ).
- Based on force and torque performance analysis during the slope traversing experiment, two optimization directions are provided for different slope angles, with each direction bearing its own unique benefit.
2. Related Work
2.1. Reconfigurable Rover Design
2.2. Environment Perception and State Estimation
2.3. Slope Traversing Strategy and Analysis
3. Rover Modeling on Sandy Slope
- The rover speed is very low; hence, the slope traversing can be considered as a quasi-static problem.
- The rover has four independently driven rigid wheels.
- The slope surface is flat and is uniformly covered with loose soil (we use loose sand in this paper).
- The slippage of each wheel during movement is the same, and is equivalent to the slippage of the rover.
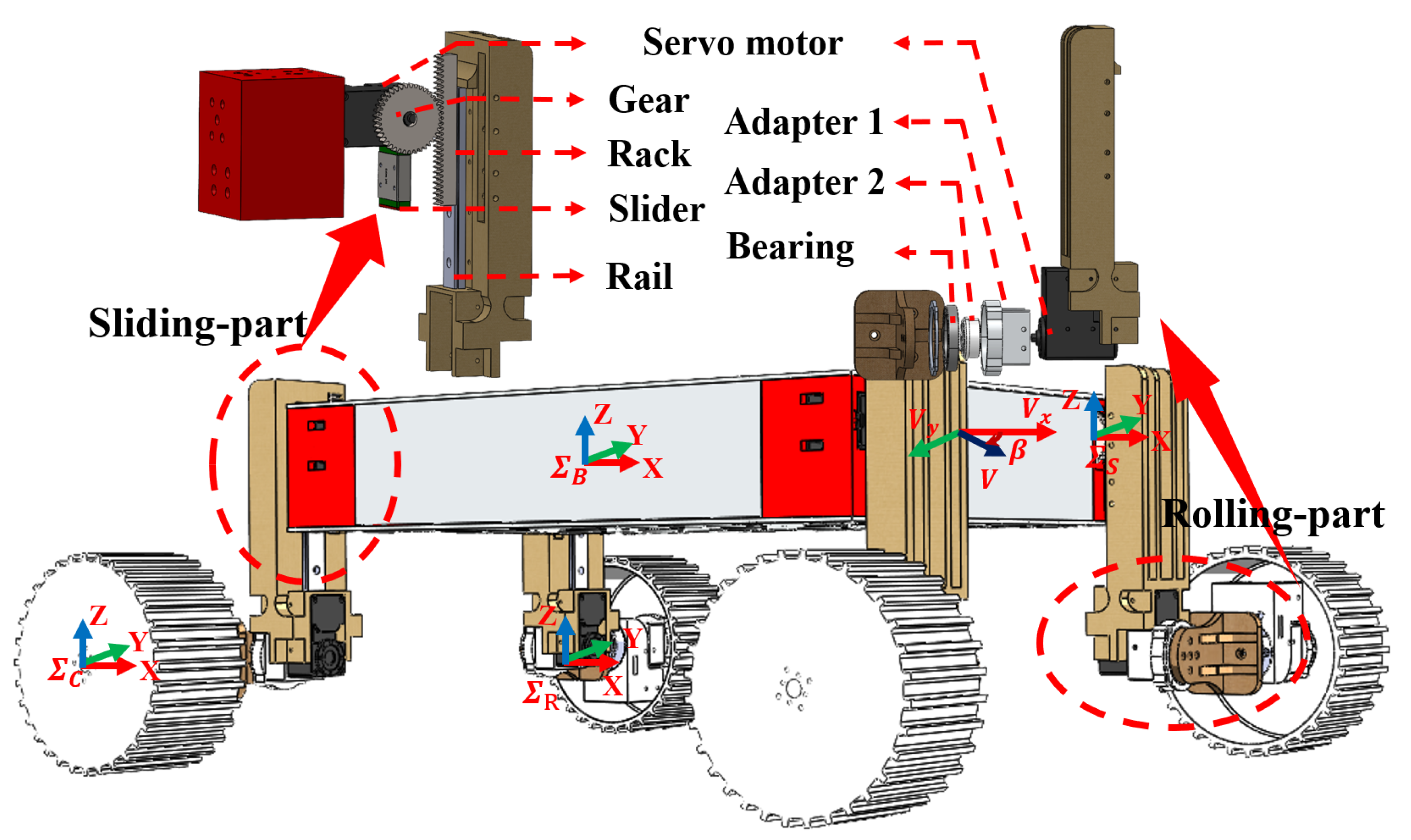
3.1. Introduction of Adjustment Mechanism
- Sliding-part: A coarse adjustment linkage that adjusts the wheel loads by changing the longitudinal distance between each wheel and the rover’s COM.
- Rolling-part: A fine adjustment linkage that can fine-tune the angle between the wheel’s side surface and slope surface or switch the rover’s driving mode. This mechanism is learned from the human ankle joint. As humans will change their foot pose while climbing the slopes, and this method is really helpful, we think our robot can also use this strategy to improve traversing ability.
3.2. Coordinate System Definition
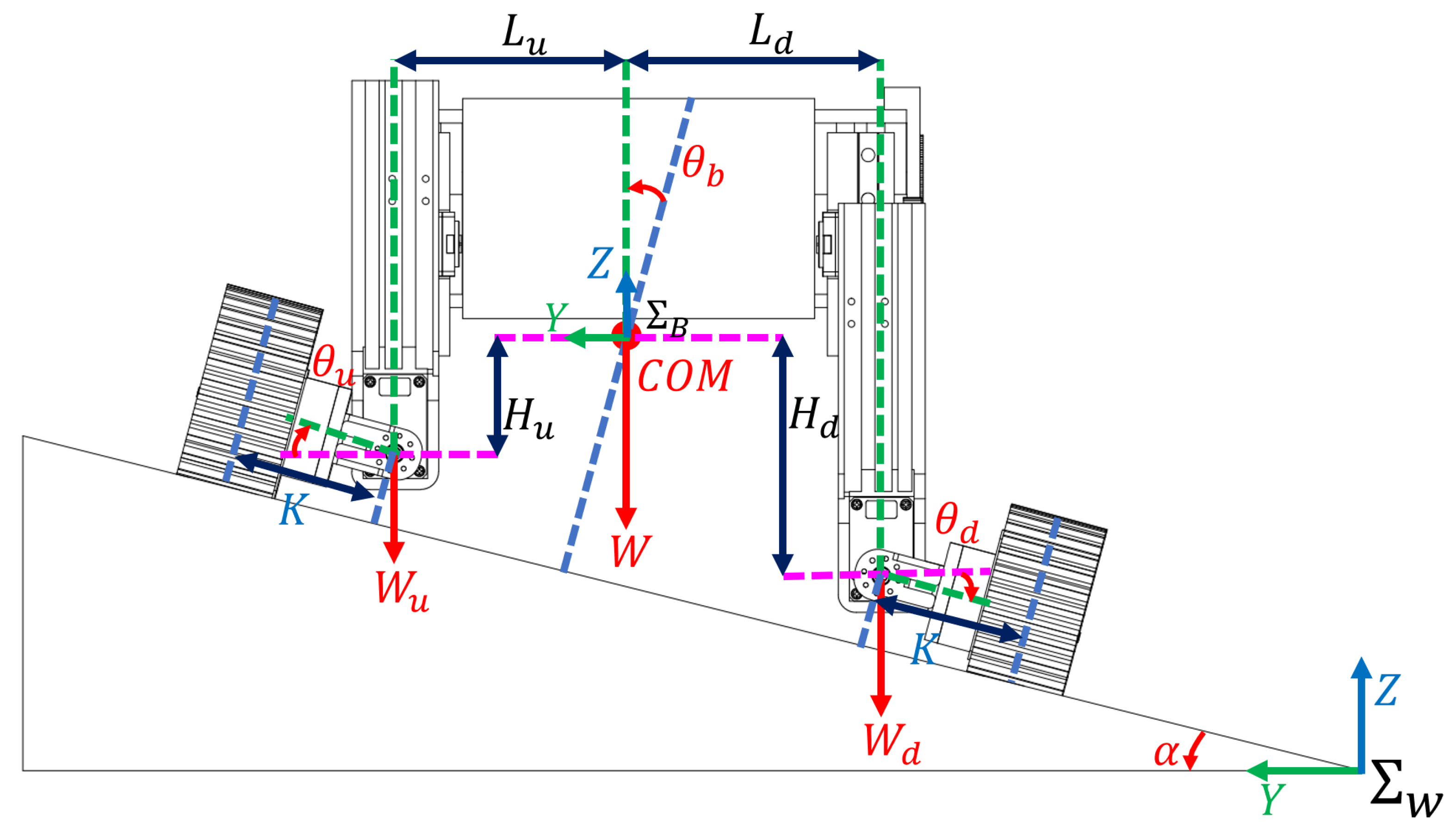
3.3. Wheel Load Model of the Reconfigurable Rover
3.4. Wheel–Soil Contact Model
3.5. Integrated Model
4. Pose Control Strategy
| Algorithm 1 Attitude control strategy for slope traversing. |
|
| Algorithm 2 calculated by particle swarm optimization algorithm. |
|
5. Simulations and Experiments
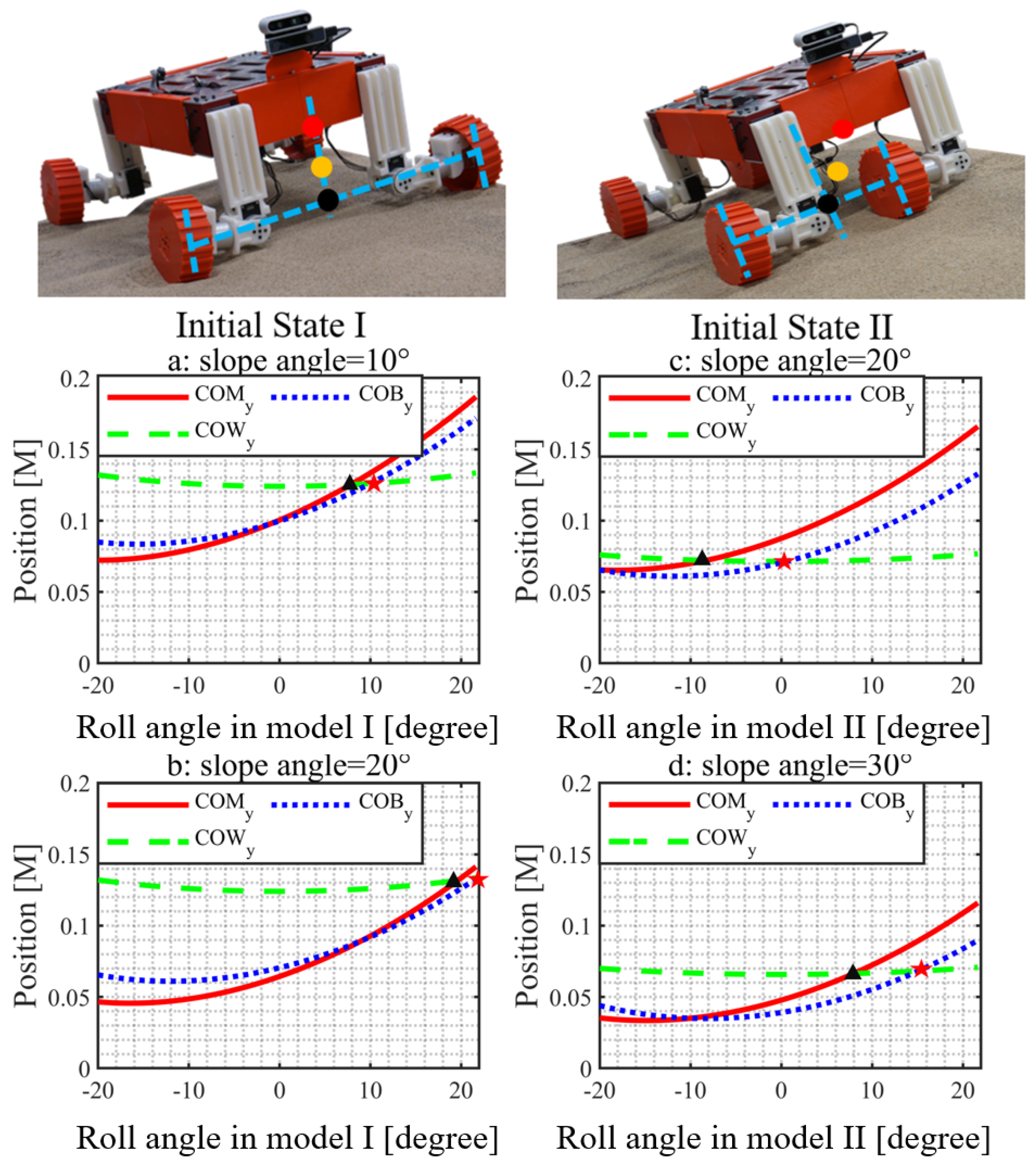
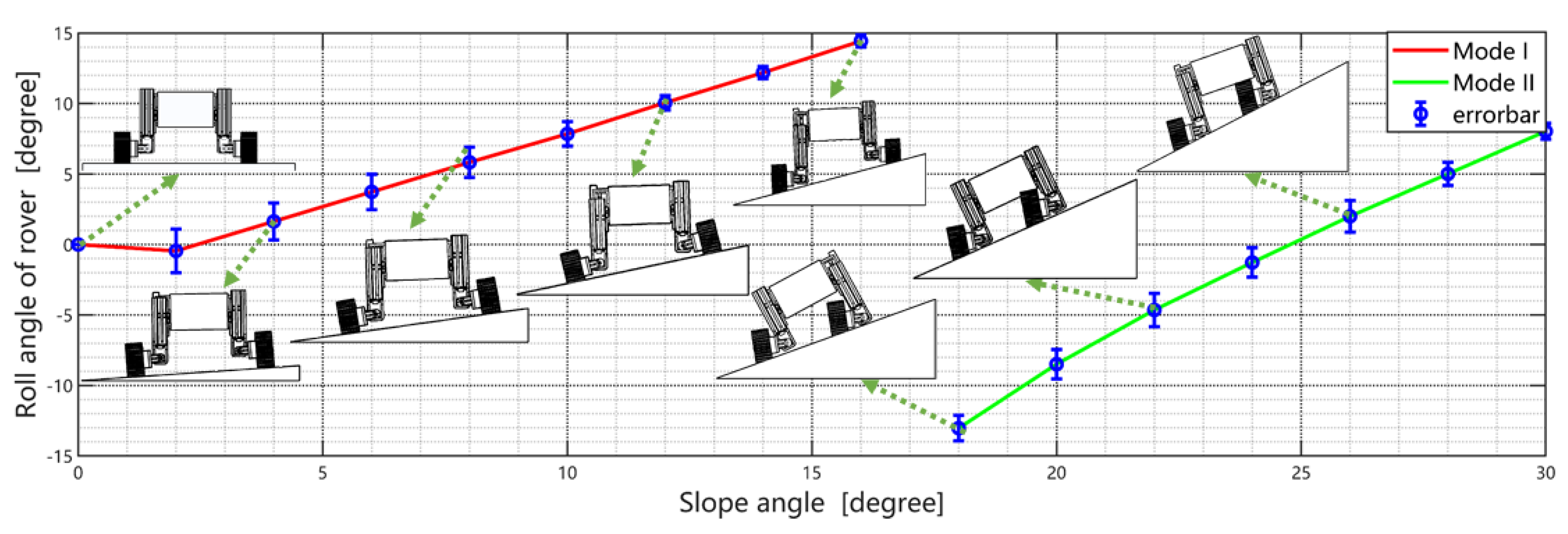
5.1. Slope Traversability Analysis
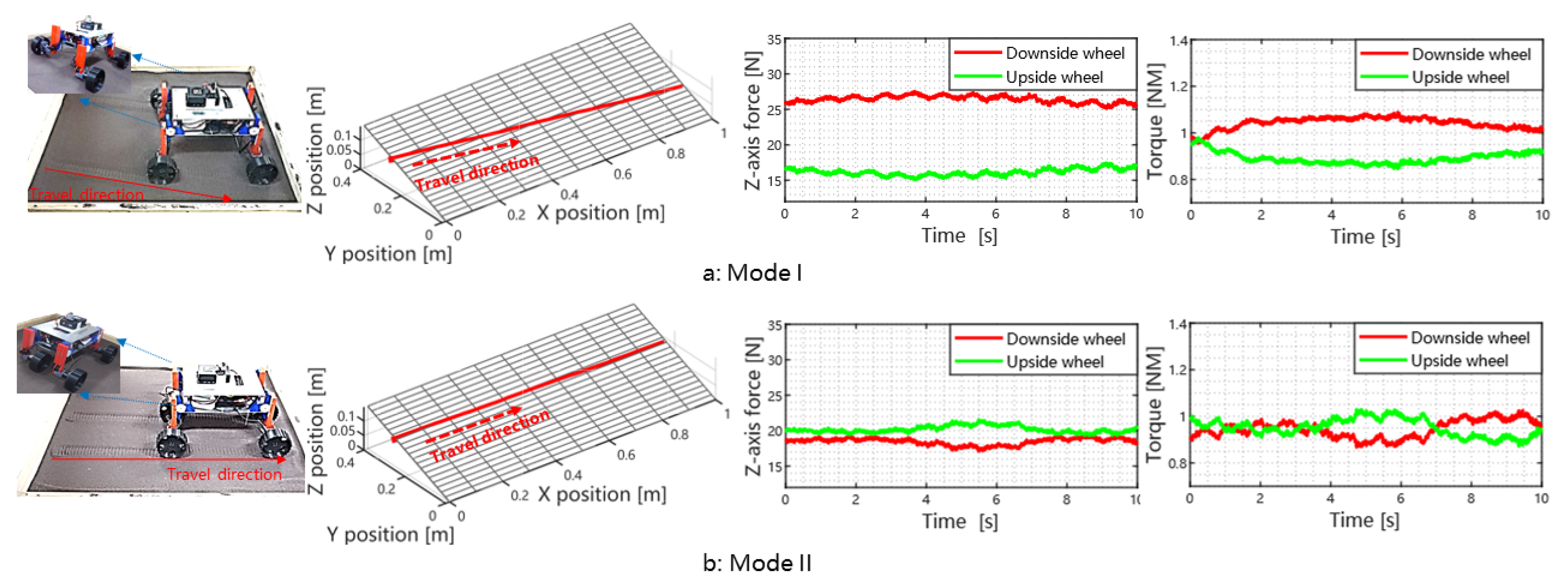
5.2. Force Characteristics
5.2.1. Coarse Adjustment
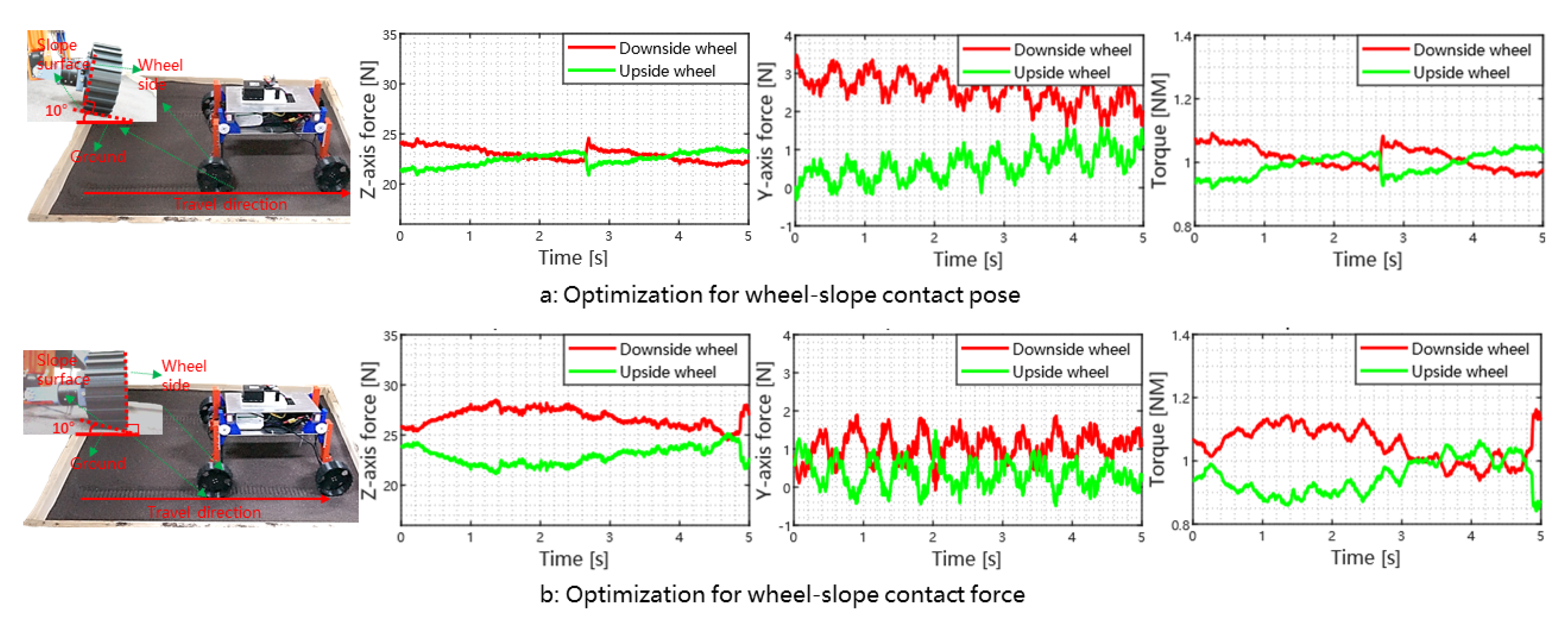
5.2.2. Fine Adjustment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wong, J.Y. Theory of Ground Vehicles; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Inotsume, H.; Sutoh, M.; Nagaoka, K.; Nagatani, K.; Yoshida, K. Modeling, analysis, and control of an actively reconfigurable planetary rover for traversing slopes covered with loose soil. J. Field Robot. 2013, 30, 875–896. [Google Scholar] [CrossRef]
- Inotsume, H.; Sutoh, M.; Nagaoka, K.; Nagatani, K.; Yoshida, K. Slope traversability analysis of reconfigurable planetary rovers. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 4470–4476. [Google Scholar] [CrossRef] [Green Version]
- Wettergreen, D.; Moreland, S.J.; Skonieczny, K.; Jonak, D.; Kohanbash, D.; Teza, J. Design and field experimentation of a prototype Lunar prospector. Int. J. Robot. Res. 2010, 29, 1550–1564. [Google Scholar] [CrossRef]
- Sim, B.S.; Kim, K.J.; Yu, K.H. Development of Body Rotational Wheeled Robot and its Verification of Effectiveness. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 10405–10411. [Google Scholar]
- Lv, S.; Zhao, Y.; Chen, Z.; Gao, C.; Hu, L.; Jia, Z. Improved Rover Mobility Over Loose Deformable Slopes through Active Control of Body-Rotating Mechanism. In Proceedings of the 2021 27th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Shanghai, China, 26–28 November 2021; pp. 606–611. [Google Scholar] [CrossRef]
- Hamersma, H.A.; Els, P.S. Vehicle suspension force and road profile prediction on undulating roads. Veh. Syst. Dyn. 2021, 59, 1616–1642. [Google Scholar] [CrossRef]
- Cordes, F.; Kirchner, F.; Babu, A. Design and field testing of a rover with an actively articulated suspension system in a Mars analog terrain. J. Field Robot. 2018, 35, 1149–1181. [Google Scholar] [CrossRef]
- Peng, M.; Di, K.; Wang, Y.; Wan, W.; Liu, Z.; Wang, J.; Li, L. A Photogrammetric-Photometric Stereo Method for High-Resolution Lunar Topographic Mapping Using Yutu-2 Rover Images. Remote Sens. 2021, 13, 2975. [Google Scholar] [CrossRef]
- Gonzalez, R.; Apostolopoulos, D.; Iagnemma, K. Slippage and immobilization detection for planetary exploration rovers via machine learning and proprioceptive sensing. J. Field Robot. 2018, 35, 231–247. [Google Scholar] [CrossRef]
- Ugur, D.; Bebek, O. Fast and Efficient Terrain-Aware Motion Planning for Exploration Rovers. In Proceedings of the 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), Lyon, France, 23–27 August 2021; pp. 1561–1567. [Google Scholar] [CrossRef]
- Ishigami, G.; Nagatani, K.; Yoshida, K. Slope traversal controls for planetary exploration rover on sandy terrain. J. Field Robot. 2009, 26, 264–286. [Google Scholar] [CrossRef] [Green Version]
- Inotsume, H.; Creager, C.; Wettergreen, D. Finding Routes for Efficient and Successful Slope Ascent for Exploration Rovers. Available online: https://robotics.estec.esa.int/i-SAIRAS/isairas2016/Session5c/S-5c-3-HiroakiInotsume.pdf (accessed on 3 December 2022).
- Inotsume, H.; Kubota, T.; Wettergreen, D. Robust Path Planning for Slope Traversing Under Uncertainty in Slip Prediction. IEEE Robot. Autom. Lett. 2020, 5, 3390–3397. [Google Scholar] [CrossRef]
- Reid, W.; Paton, M.; Karumanchi, S.; Chamberlain-Simon, B.; Emanuel, B.; Meirion-Griffith, G. Autonomous navigation over Europa analogue terrain for an actively articulated wheel-on-limb rover. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 1939–1946. [Google Scholar]
- Jia, Z.; Smith, W.; Peng, H. Fast analytical models of wheeled locomotion in deformable terrain for mobile robots. Robotica 2013, 31, 35. [Google Scholar] [CrossRef]
- Jia, Z.; Smith, W.; Peng, H. Terramechanics-based wheel-terrain interaction model and its applications to off-road wheeled mobile robots. Robotica 2012, 30, 491. [Google Scholar] [CrossRef] [Green Version]
- Wong, J.Y.; Reece, A. Prediction of rigid wheel performance based on the analysis of soil-wheel stresses part I. Performance of driven rigid wheels. J. Terramech. 1967, 4, 81–98. [Google Scholar] [CrossRef]
- Wong, J.Y.; Reece, A. Prediction of rigid wheel performance based on the analysis of soil-wheel stresses: Part II. Performance of towed rigid wheels. J. Terramech. 1967, 4, 7–25. [Google Scholar] [CrossRef]
- Ishigami, G.; Miwa, A.; Nagatani, K.; Yoshida, K. Terramechanics-based model for steering maneuver of planetary exploration rovers on loose soil. J. Field Robot. 2007, 24, 233–250. [Google Scholar] [CrossRef]
- Inotsume, H.; Sutoh, M.; Nagaoka, K.; Nagatani, K.; Yoshida, K. Evaluation of the reconfiguration effects of planetary rovers on their lateral traversing of sandy slopes. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St. Paul, MN, USA, 14–18 May 2012; pp. 3413–3418. [Google Scholar]
- Moreland, S.; Skonieczny, K.; Inotsume, H.; Wettergreen, D. Soil behavior of wheels with grousers for planetary rovers. In Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012; pp. 1–8. [Google Scholar]
- Reid, W.; Pérez-Grau, F.J.; Göktoğan, A.H.; Sukkarieh, S. Actively articulated suspension for a wheel-on-leg rover operating on a martian analog surface. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5596–5602. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition |
|---|---|
| Rover’s body coordinate system | |
| Sliding-part coordinate system | |
| Rolling-part coordinate system | |
| Rotation matrix, rotation relation of relative to | |
| Rotation matrix, rotation relation of relative to | |
| Origin coordinate, origin relation of relative to | |
| Origin coordinate, origin relation of relative to | |
| COM’s positions of the rover’s body in | |
| COM’s positions of the sliding-part in | |
| COM’s positions of the rolling-part in | |
| Mass of rover’s body (3.1 kg) | |
| Mass of single sliding-part (0.6 kg) | |
| Mass of single rolling-part (1.0 kg) |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Size (mm) | L600 × W540 × H230 | Mass (kg) | 9.5 |
| Wheel size (mm) | 140 × W50 | Tread (mm) | 490 |
| Wheel base (mm) | 460 | Gravitational acceleration (m/s) | 9.81 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lyu, S.; Zhang, W.; Yao, C.; Zhu, Z.; Jia, Z. Modeling and Analysis of a Reconfigurable Rover for Improved Traversing over Soft Sloped Terrains. Biomimetics 2023, 8, 131. https://doi.org/10.3390/biomimetics8010131
Lyu S, Zhang W, Yao C, Zhu Z, Jia Z. Modeling and Analysis of a Reconfigurable Rover for Improved Traversing over Soft Sloped Terrains. Biomimetics. 2023; 8(1):131. https://doi.org/10.3390/biomimetics8010131
Chicago/Turabian StyleLyu, Shipeng, Wenyao Zhang, Chen Yao, Zheng Zhu, and Zhenzhong Jia. 2023. "Modeling and Analysis of a Reconfigurable Rover for Improved Traversing over Soft Sloped Terrains" Biomimetics 8, no. 1: 131. https://doi.org/10.3390/biomimetics8010131
APA StyleLyu, S., Zhang, W., Yao, C., Zhu, Z., & Jia, Z. (2023). Modeling and Analysis of a Reconfigurable Rover for Improved Traversing over Soft Sloped Terrains. Biomimetics, 8(1), 131. https://doi.org/10.3390/biomimetics8010131