1. Introduction
Over the last few years, the combination of 3D printing and Arduino has proven to be an efficient and cost-effective way of making experimental equipment [
1], becoming on many occasions an attractive alternative to its commercial counterparts.
In fact, the implementation of opto-mechanical components using 3D printing technology is having a direct impact on the scientific community [
2,
3], firstly, because researchers are no longer constrained to work with commercially available products, and therefore, their experimental setups can be made more versatile. Secondly, since the materials, fabrication techniques and electronic components are evolving very fast, and the characteristics and quality of the equipment developed can improve significantly from the experience and needs of the researcher [
4,
5]. Lastly, the development process turns out to be a creative way to engage young researchers in science and increase the size of the scientific open-source hardware and software community thanks to the fact that several open-source platforms are currently available and the detailed building instructions are shared [
6,
7,
8,
9].
Interestingly the term open-source laboratory equipment spans a large variety of applications ranging from a simple laboratory clamp [
10] that requires only 3D printing and simple hardware, to more advanced instruments such as a system to determine the concentration of dissolved species [
11], a system to provide a carefully controlled dose of a given reagent [
12,
13], a device to characterize the spatial profile of a laser beam easily [
14], a centrifuge for DNA extraction [
15] or a 3D-printable open-source platform for fluorescence microscopy [
16], to name a few.
In this paper, we report the development of a system that can motorize many of the kinematic mounts available nowadays on the market. It combines 3D-printed components, simple hardware and electronics and an Arduino board. The system is intended to add automation capabilities to the Open-Source Optics Library [
2] already available on the Internet. The library is composed of a broad selection of optical components ubiquitous in any optics experiment such as lens holders [
17], screen/filter holders [
18,
19], lab jacks [
20], fiber optic holders [
21], kinematic mirrors and translation stages [
22,
23] and parametric open-source chopper wheels [
24], to name a few.
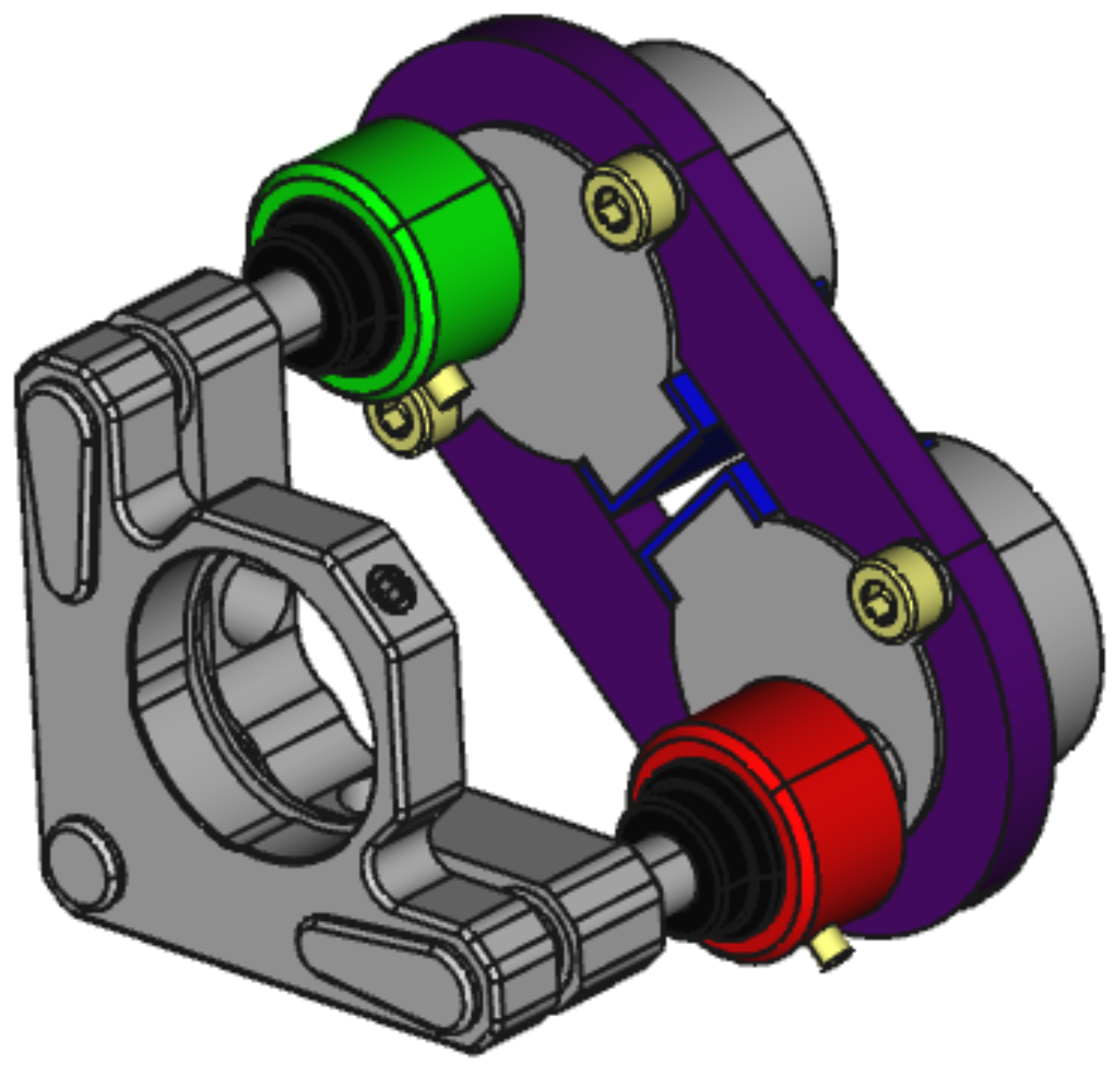
The system we demonstrate here is simple, flexible and cost effective. The simplicity of the system relies on the components used to implement it. It is composed of a 3D-printed plate that supports two stepper motors 28BYJ-48 [
25]. Its shafts are aligned with the knobs used to tip and tilt the plane of the kinematic mount that supports the optics (see
Figure 1). The cylindrical adapter used to couple the shaft to the knob is also 3D printed. An Arduino MEGA controls the motors. In order to simplify the connections with the motor drivers, a shield (Sensor Shield V1.0) [
25] provides the capability of controlling up to ten motors simultaneously by sending simple instructions defined by a command table through the serial port.
The hardware and software of the system are flexible and can be easily modified according to the user needs. From the hardware side, since the 3D-printed components that couple the system to the kinematic mount were parametrically designed using FreeCAD 0.16 [
26], the system is highly tunable by changing only a few parameters in a spreadsheet. Similarly, from the software side, the Arduino code is well documented, and some usage examples are provided in the *.ino file. The FreeCAD and Arduino source code can be downloaded from the repositories Thingiverse [
27] and Github [
28], respectively.
The low cost of the system is the byproduct of its simplicity. As a reference, the average cost of fabricating a system composed of four stepper motors for controlling two kinematic mounts is around 30€. The system presented in this letter thus compares favorably with respect to commercial alternatives, since it can be roughly between five- and 10-times less expensive. However, a word of caution should be added here. Since the system keeps track of the number of steps given by the stepper motor of each channel to estimate its current position, some inaccuracies may appear due to the hysteresis present on the stepper motors. Therefore, the true usefulness of the system presented in this work will depend on its specific aim. Based on our experience in the laboratory in a research institute, we find that the system is suitable for a wealth of applications ranging from teaching to doing high-quality research experiments.
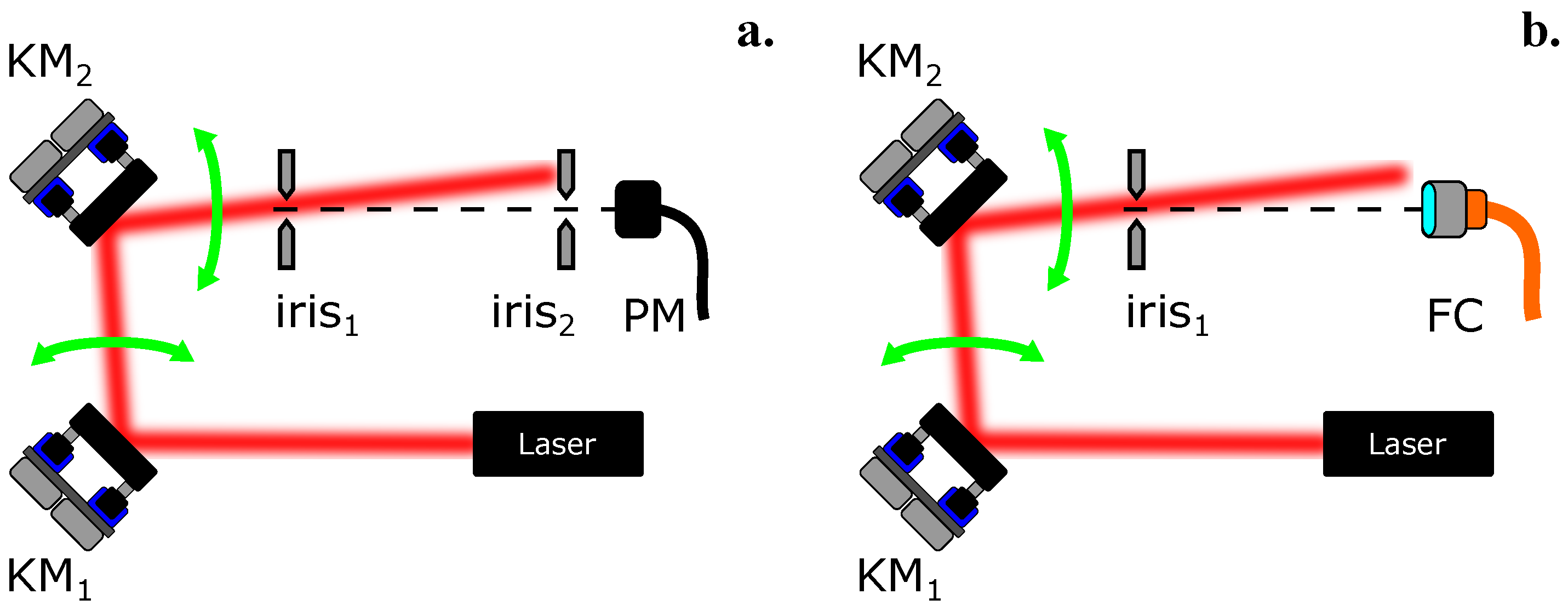
To illustrate and validate the system developed, we consider two scenarios that may require the use of two mirrors supported by two kinematic mounts. The first scenario is the alignment of a laser beam through two reference apertures, and the second scenario is the coupling of light into a multimode or single-mode optical fiber. Both scenarios might be of great interest to experimenters that require re-aligning an optical beam or increasing the coupling efficiency of an optical fiber on a daily basis.
2. Materials and Methods
We have designed and implemented a system that can provide full automatic control of a vast majority of standard kinematic mounts available on the market. It combines open-source resources such as 3D printing and simple electronics.
A single unit of the system, capable of controlling the tip and tilt of a kinematic mount, is composed of two stepper motors attached to a 3D-printed plaque that aligns the knobs of the kinematic mount with the axis of the motors. The axis is coupled to the knobs using a 3D-printed knob adapter. The motor drivers are connected to an Arduino MEGA sensor shield (attached to an Arduino MEGA) using Dupont wire jumper cables.
Table 1 provides the list of materials required to motorize a kinematic mount for a single channel, as well as their estimated cost.
2.1. Hardware
Figure 2a provides a connection diagram for a single unit that makes use of two channels (tip and tilt). Each channel is composed of a stepper motor 28BYJ-48, driver electronics and a Dupont cable patch with six wires. Given the number of output pins available on the Arduino sensor shield, the board can be used to control up to five kinematic mounts simultaneously, as shown in
Figure 2b.
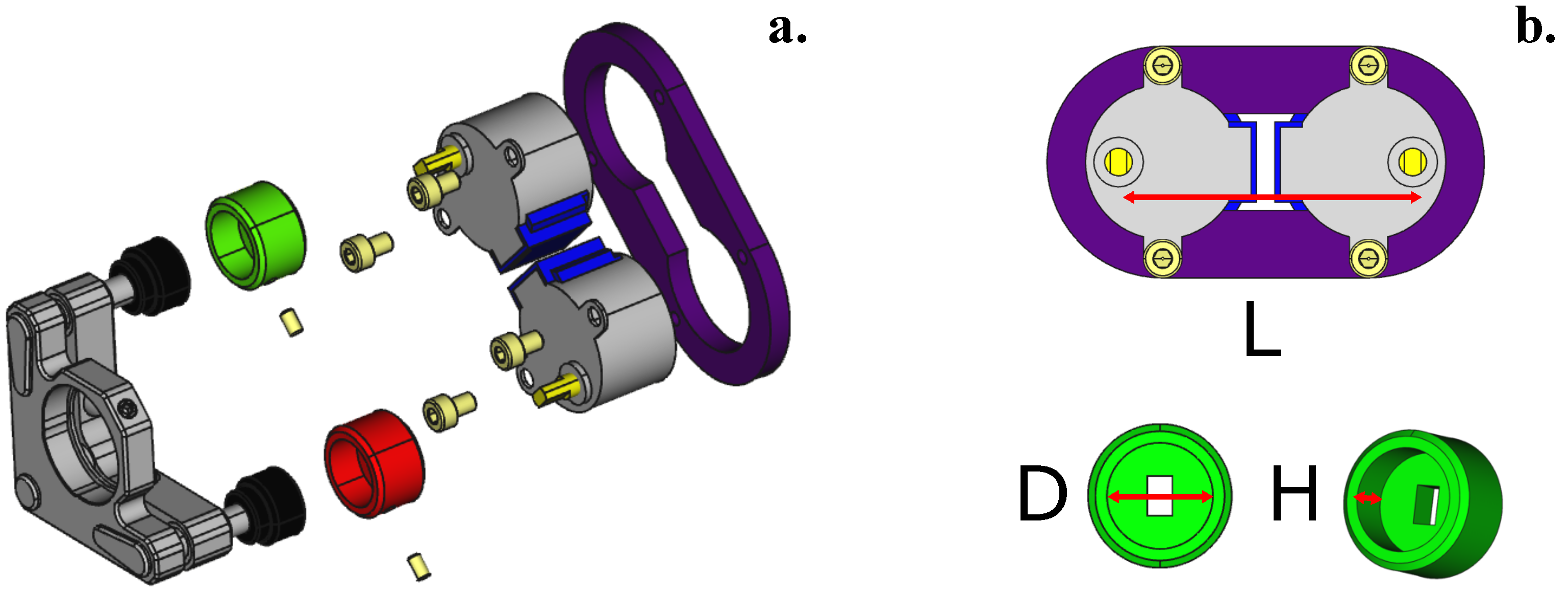
Since the 3D-printed components that couple the stepper motors to the kinematic mount were designed using FreeCAD 0.16, the distance between the motor axis on the plate and the inner diameter and height on the knob adapters can be easily modified using a spreadsheet. To attach the motors to the plastic plate, four M4 screws are required, whereas two M3 grub screws are used to secure the knobs to the knob adapters (see
Figure 3).
Table 2 provides information on the parameters used for customizing the plate and the knob adapter to fit into four different types of kinematic mounts (see
Figure 3b). The FreeCAD FCStdfiles are available on Thingiverse [
27].
Regarding the motors used, the 28BYJ-48 is a very inexpensive stepper motor that requires five wires for its connection to the motor driver circuit. The motor can operate in the voltage range from 5 V–12 V and gives 4096 steps per one turn. This number comes from the fact that the internal stepper motor that requires 64 steps to give a complete turn is connected to a set of gears that provide a reduction ratio of 1/64. As a result, the 28BYJ-48 requires steps to complete a full turn.
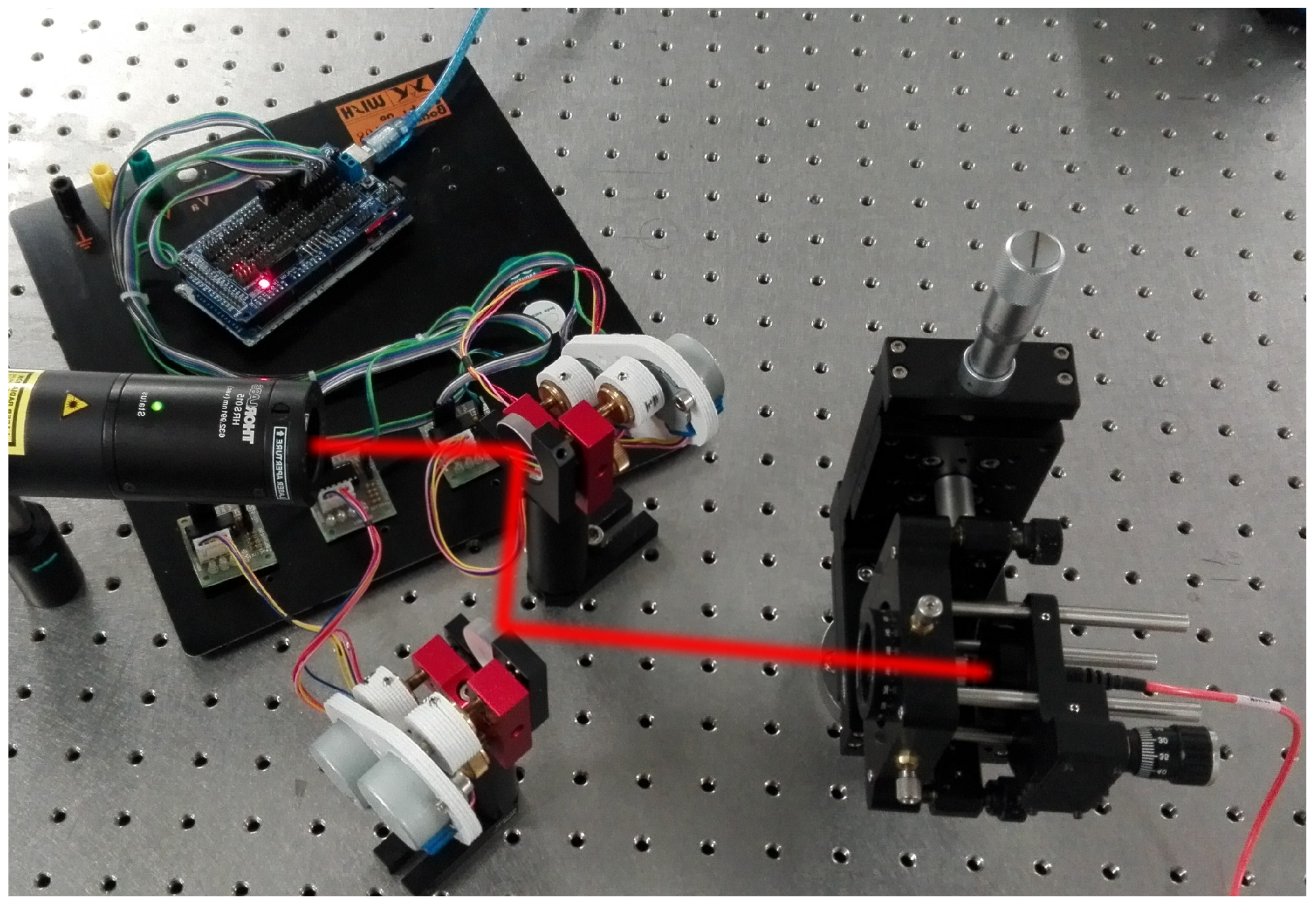
For the sake of illustration,
Figure 4 shows the experimental setup corresponding to
Figure 5b, where two kinematic mounts from Radiant Dyes are motorized. Notice that for each channel, we have used the following components: one 3D-printed supporting plate, two 3D-printed knob couplers, two stepper motors and the corresponding driving electronics. In this particular case, the power supplied by the USB port is enough to move the motors. However, in order to control more than four stepper motors simultaneously, it may be necessary to connect the sensor shield to an external power supply.
2.2. Software
In order to provide flexibility and simplicity from the software perspective, each motor is controlled independently by sending a simple instruction defined by a command table through the serial port. A command table is a dictionary of instructions that can be divided into two categories: commands and queries. The first category corresponds to a direct order such as “move stepper motor connected to port 3, half-turn”. The second type of command is used to ask information of the device about its status; for example, the state of a digital variable, the value of a given counter or the identification string that contains relevant information about the device and its manufacturer.
For reference,
Table 3 shows the complete list of commands used to control and retrieve information about the status of each motor connected to the Arduino board. Since the status of each motor is determined by a variable that keeps track of the number of steps given by the motor, there is assumed to be a one-to-one correspondence between the number of steps defined by software and the number of steps given by the axis of the motor. A step in the clock-wise direction adds one unit to the global counter; a step in the counter-clock-wise direction subtracts a unit. To keep the current status of each motor over time, the value of each global counter is stored in the non-volatile section of the Arduino (EEPROM memory) so that all the information is available even though the Arduino board is powered off.
Since the control method is based on a command table, there are many alternatives to implement the software interface that controls the system. Depending on the application, the user may require performing simple actions driven by simple commands, or a more elaborate sequence of tasks dependent on external signals, or defined by an algorithm with temporal dependence. The former can be implemented by sending commands through the serial port using a serial communication terminal compatible with the RS232 standard such as Termite [
29], and the latter can be implemented using MATLAB, Python or other software.
In our implementation, a MATLAB routine communicates with the Arduino board, moves the stepper motors and reads the power detected by a Thorlabs PM100-A detector. The beam auto-alignment procedure is carried out by scanning the X-Y plane in two steps: firstly, the horizontal direction (X) is scanned a certain number of steps while the optical power is measured. Afterwards, the vertical direction (Y) is scanned. In each step, the power and motor position are recorded and stored in a *.dat file. When the loop finishes, the algorithm returns the motors to the position at which maximum power was detected. The power is first maximized for the X direction and later for the Y direction.
The number of steps used in each scan is selected initially by the user. Larger ranges lead to a wider scanning of the X-Y plane. This setting is advisable for a first approximation, while smaller rotational ranges guarantee the convergence and optimization of the auto-alignment method implemented in MATLAB.
3. Results
To validate and test the performance of the motorized system, we implemented the two experimental schemes shown in
Figure 5. We used a HeNe laser and aligned the laser beam with the help of two mirrors supported by two kinematic mounts,
and
.
In each experiment, the tip and tilt of each of the two mirrors were automatically controlled using a MATLAB routine. The power after the second iris (
Figure 5a) or at the output of the fiber (
Figure 5b) was monitored using a Thorlabs PM100A power meter. After scanning sequentially the tip and subsequently the tilt of both mirrors, the final position of each kinematic mount was set to the position that corresponds to the maximum power registered.
3.1. Alignment of an Optical Beam with the Help of Two Irises
The experimental scheme is shown in
Figure 5a. The initial position of the mirrors (without using the stepper motors) was set so that the optical beam hits the first iris close to its center. This coarse alignment was mainly driven by the first mirror
. Once the starting point was defined, the motors were attached to the kinematic mounts knobs, and a simple MATLAB routine was executed where each motor moved independently a defined number of steps either in a clock-wise or anti-clockwise direction. The optical power was measured by the detector located after the second iris.
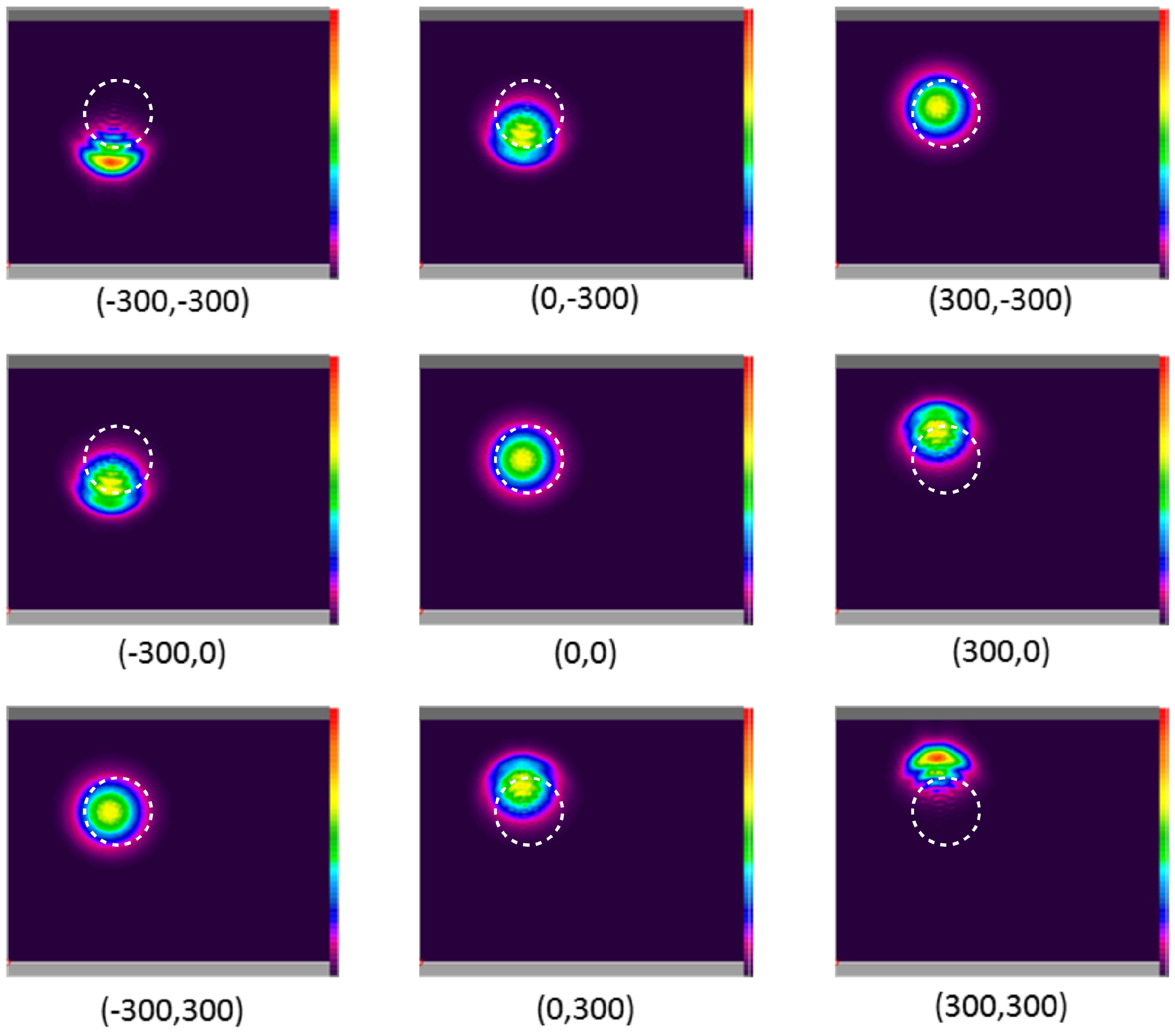
To illustrate a step-by-step run of the MATLAB routine, a CCD camera was placed just after the second iris, and a beam image was acquired for several positions of both motors.
Figure 6 and
Figure 7 show the beam position registered for a given combination of steps
in the X and Y directions, respectively. As a reference, the position of the second iris (set at a given aperture) is indicated by a dashed circle in all images.
In the example, each motor and was set to move between three different positions separated by 300 steps, so that each motor could move between the absolute positions , 0 and 300. As a result, a full scan in the X and Y directions was defined by nine different positions indicated by the array below each figure.
Notice that the maximum power was registered for the positions , while the positions with opposite angles and corresponded to a situation where the effect of one mirror was compensated by the other and the centroid of each beam was slightly shifted to the right or left, respectively.
3.2. Optimizing the Coupling Efficiency of a Light Beam in an Optical Fiber
We replaced the second iris of the previous experimental setup by a multi-mode optical fiber (see
Figure 5b). The aim was to test the performance of the system and the simple routine written in MATLAB code for optimizing the coupling of light into an optical fiber. The motors attached to the 3D-printed kinematic mounts performed a scan in the X direction and later in the Y direction, controlled by a MATLAB program.
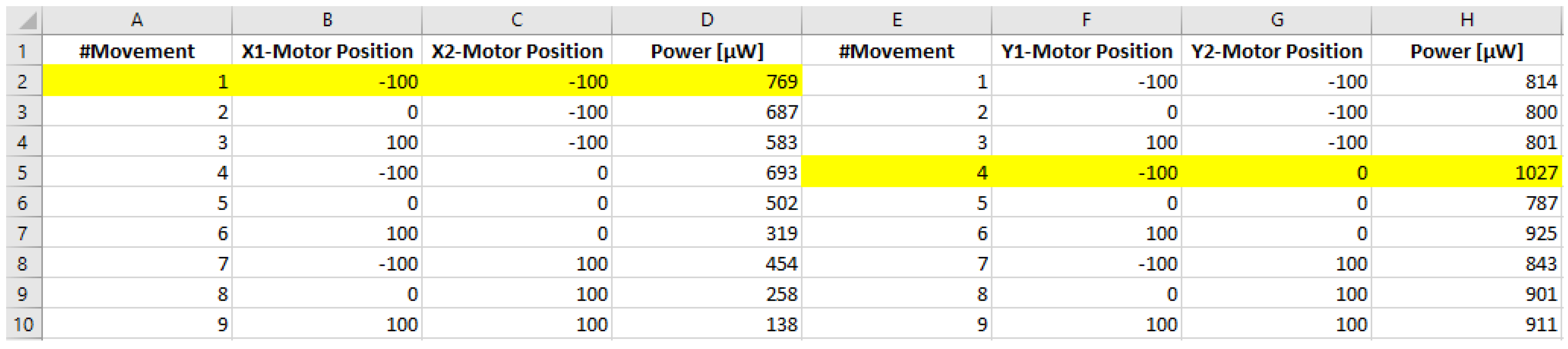
Figure 8 shows a table with the data obtained after performing a full scan in both directions. First, the X scan provided a power maximum (highlighted), which was used as the starting point for a second scan in the Y direction (highlighted).
After the scan in the X and Y directions, the motors would move to positions and , respectively. For this final situation, the recorded power was 1027 W. Taking into account that the input power of the laser was 1250 W, we obtained that the laser-fiber coupling efficiency was .
4. Discussion
The combination of 3D printing, simple hardware and Arduino-based electronics has proven to be a very effective alternative to substitute expensive and sometimes over-engineered systems with equipment that, despite costing a fraction of its commercial counterpart, can be used to perform state-of-the-art research [
1,
23].
This is precisely the case of aligning a beam through two irises and coupling light in an optical fiber. In principle, both tasks are typically carried out manually in an optics laboratory. However, it is desirable that both tasks can be carried out automatically in order to optimize research time.
Table 4 shows a selection of motorized kinematic mounts available on the market. From the table, it is clear that for some institutions or laboratories, the use of automatic equipment is simply cost-prohibitive if it is intended to be used only to perform beam alignment.
Given the simplicity of the components used, the system may experience some hysteresis that may not be suitable for applications requiring high accuracy or precision. However, we have demonstrated that the system proposed can be used in two very specific scenarios since it does not compromise the quality of the experimental data obtained. As a result, the experimenter must evaluate on an experimental basis to what extent inaccuracies inherent to the quality of the components used in the experimental setup can be withstood.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}