An Automated Technique for Extracting Phasors from Protective Relay’s Event Reports

 , , and
, , and
Abstract
:1. Introduction
2. Methodology for Data Preprocessing
2.1. Obtaining Fundamental Frequency Phasors
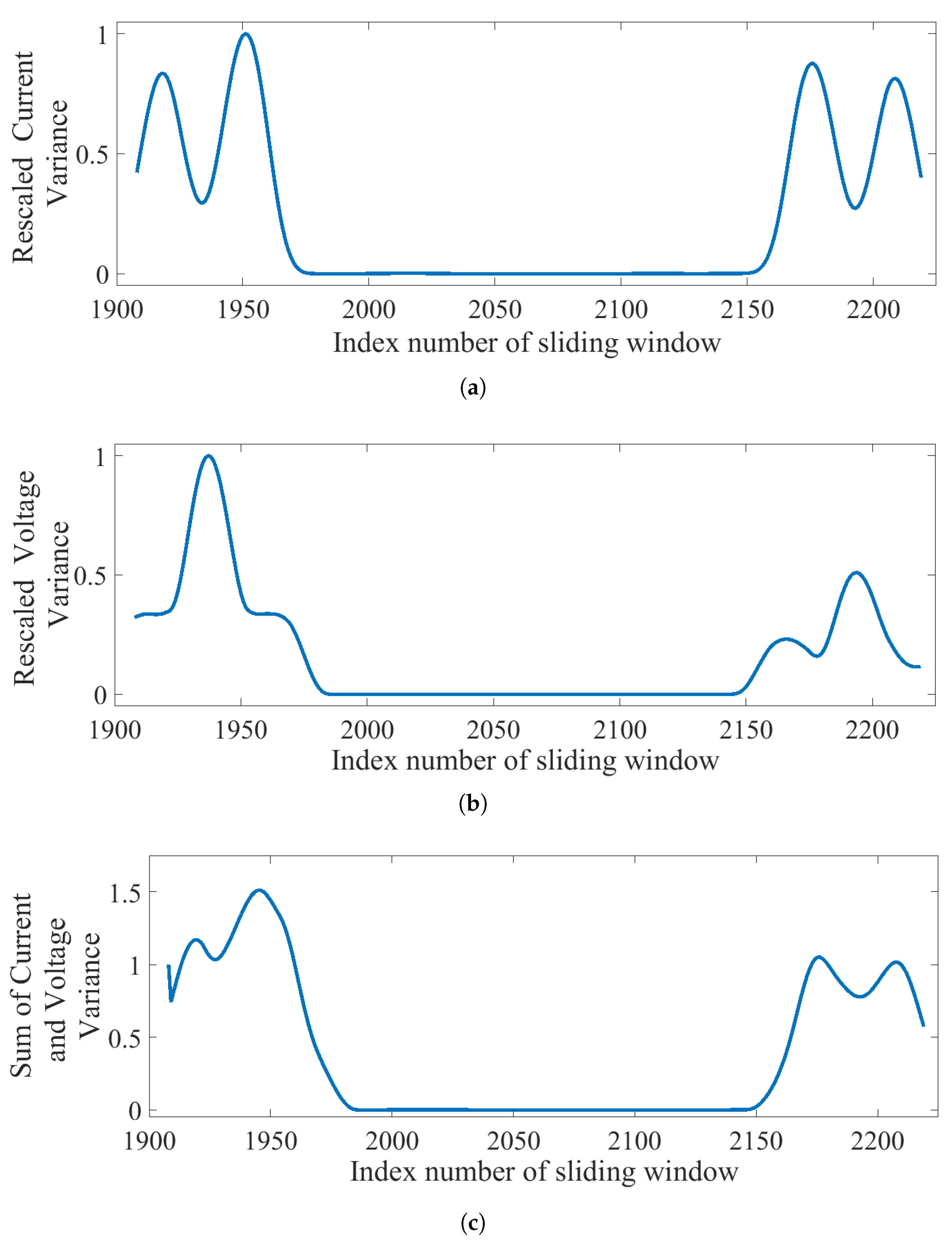
2.2. Algorithm to Select Phasors for Event Report Analysis Applications
3. Validation of Proposed Algorithm Using Field Data
3.1. Case 1: A Common Fault Scenario
3.2. Case 2: A Short Time Fault Scenario
3.3. Case 3: An Evolving Fault Scenario
3.3.1. Fault Detected as an CG Fault
3.3.2. Fault Detected as a CAG Fault
3.4. Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| IED | Intelligent Electronic Devices |
| DFT | Discrete Fourier Transform |
| RMS | Root Mean Square |
References
- Costello, D. Understanding and analyzing event report information. In Proceedings of the 55th Annual Georgia Tech Protective Relaying Conference, Atlanta, GA, USA, 2–5 May 2001; pp. 1–52. [Google Scholar]
- Schweitzer, E.O., III. A review of impedance-based fault locating experience. In Proceedings of the 14th Annual Iowa-Nebraska System Protection Seminar, Omaha, NE, USA, 16 October 1990. [Google Scholar]
- IEEE. IEEE Guide for Determining Fault Location on AC Transmission and Distribution Lines; IEEE Std C37.114-2014 (Revision of IEEE Std C37.114-2004); IEEE: Piscataway, NJ, USA, 2015; pp. 1–76. [Google Scholar]
- Ananthan, S.N.; Santoso, S. Universal model-based fault location for improved system integrity. IET Gener. Transm. Distrib. 2018. [Google Scholar] [CrossRef]
- Saha, M.M.; Izykowski, J.J.; Rosolowski, E. Fault Location on Power Networks, 1st ed.; Springer: London, UK, 2010. [Google Scholar]
- Xia, B.; Wang, Y.; Vázquez, E.; Xu, W.; Wong, D.; Tong, M. Estimation of fault resistance using fault record data. IEEE Trans. Power Deliv. 2015, 30, 153–160. [Google Scholar] [CrossRef]
- Das, S.; Santoso, S. Utilizing relay event reports to identify settings error and avoid relay misoperations. In Proceedings of the 2016 IEEE/PES Transmission and Distribution Conference and Exposition, Dallas, TX, USA, 3–5 May 2016; pp. 1–5. [Google Scholar]
- Das, S.; Ananthan, S.N.; Santoso, S. Relay performance verification using fault event records. Prot. Control Mod. Power Syst. 2018, 3, 22. [Google Scholar] [CrossRef]
- Zimmerman, K.; McDaniel, R. Using Power System Event Data to Reduce Downtime. In Proceedings of the IEEE Cement Industry Technical Conference, Palm Springs, CA, USA, 29 May–5 June 2009; pp. 1–15. [Google Scholar]
- Amberg, A.; Rangel, A.; Smelich, G. Validating transmission line impedances using known event data. In Proceedings of the 2012 65th Annual Conference for Protective Relay Engineers, College Station, TX, USA, 2–5 April 2012; pp. 269–280. [Google Scholar]
- Das, S.; Ananthan, S.N.; Santoso, S. Estimating zero-sequence line impedance and fault resistance using relay data. IEEE Trans. Smart Grid 2017. [Google Scholar] [CrossRef]
- Das, S.; Ananthan, S.N.; Santoso, S. Estimating zero-sequence impedance of three-terminal transmission line and Thevenin impedance using relay measurement data. Prot. Control Mod. Power Syst. 2018, 3, 36. [Google Scholar] [CrossRef]
- Sharma, C.; Castellanos, F. Remote fault estimation and thevenin impedance calculation from relays event reports. In Proceedings of the 2006 IEEE/PES Transmission Distribution Conference and Exposition: Latin America, Caracas, Venezuela, 15–18 August 2006; pp. 1–7. [Google Scholar]
- Henville, C.F. Digital relay reports verify power system models. IEEE Trans. Power Deliv. 1998, 13, 386–393. [Google Scholar] [CrossRef]
- Bastos, A.F.; Lao, K.W.; Todeschini, G.; Santoso, S. Accurate identification of Point-on-Wave inception and recovery instants of voltage sags and swells. IEEE Trans. Power Deliv. 2018. [Google Scholar] [CrossRef]
- Bastos, A.F.; Santoso, S.; Todeschini, G. Comparision of methods for determining inception and recovery points of voltage variation events. In Proceedings of the 2018 IEEE Power Energy Society General Meeting, Portland, OR, USA, 5–9 August 2018; pp. 1–5. [Google Scholar]
- Horowitz, S.H.; Phadke, A.G. Power System Relaying; John Wiley & Sons: Chichester, UK, 2014. [Google Scholar]
- Phadke, A.G.; Thorp, J.S. Synchronized Phasor Measurements and Their Applications; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Das, S.; Santoso, S.; Gaikwad, A.; Patel, M. Impedance-based fault location in transmission networks: Theory and application. IEEE Access 2014, 2, 537–557. [Google Scholar] [CrossRef]
- Hargrave, A.; Thompson, M.J.; Heilman, B. Beyond the knee point: A practical guide to CT saturation. In Proceedings of the 2018 71st Annual Conference for Protective Relay Engineers (CPRE), College Station, TX, USA, 26–29 March 2018; pp. 1–23. [Google Scholar]
- Zimmerman, K.; Costello, D. Impedance-based fault location experience. In Proceedings of the 58th Annual Conference for Protective Relay Engineers, College Station, TX, USA, 5–7 April 2005; pp. 211–226. [Google Scholar]
- Costello, D. Lessons learned analyzing transmission faults. In Proceedings of the 2008 61st Annual Conference for Protective Relay Engineers, College Station, TX, USA, 1–3 April 2008; pp. 410–422. [Google Scholar]
- EPRI. Distribution Fault Location: Field Data and Analysis; Product Id: 1012438; EPRI: Palo Alto, CA, USA, 2006. [Google Scholar]
- EPRI. Transmission Line Protection Support Tools: Fault Location Algorithms and the Potential of Using Intelligent Electronic Device Data for Protection Applications; Product Id: 3002002381; EPRI: Palo Alto, CA, USA, 2013. [Google Scholar]
- Perez, J. A guide to digital fault recording event analysis. In Proceedings of the 2010 63rd Annual Conference for Protective Relay Engineers, College Station, TX, USA, 29 March–1 April 2010; pp. 1–17. [Google Scholar]
- Sachdev, M.S.; Das, R. Understanding microprocessor-based technology applied to relaying. In Power System Relaying Committee—Report of Working Group I-01 of the Relaying Practices Subcommittee; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- EPRI. Transmission Fault Location Using Open XDA Software: Technical Evaluation; Product Id: 3002009382; EPRI: Palo Alto, CA, USA, 2016. [Google Scholar]
- Bastos, A.F.; Lao, K.W.; Todeschini, G.; Santoso, S. Novel moving average filter for detecting rms voltage step changes in triggerless PQ data. IEEE Trans. Power Deliv. 2018, 33, 2920–2929. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Cycles after Fault Inception | ||||||
|---|---|---|---|---|---|---|
| 0.5 | 1 | 1.5 | 2 | 3 | ||
| Sample Number | 1940 | 1972 | 2004 | 2036 | 2100 | 2046 |
| Reactance | 9.57 | 3.10 | 3.10 | 3.13 | 3.13 | 3.13 |
| Takagi | 9.56 | 3.10 | 3.09 | 3.13 | 3.13 | 3.13 |
| Novosel | 9.63 | 3.12 | 3.11 | 3.16 | 3.15 | 3.15 |
| Number of Cycles after Fault Inception | ||||||
|---|---|---|---|---|---|---|
| 0.5 | 1 | 1.5 | 2 | 3 | ||
| Sample Number | 63 | 71 | 79 | 87 | 103 | 74 |
| Reactance | 20.38 | 14.63 | 14.23 | 12.90 | - | 14.62 |
| Takagi | 20.35 | 14.54 | 14.23 | 13.26 | - | 14.56 |
| Novosel | 20.29 | 14.59 | 14.23 | 13.11 | - | 14.61 |
| Number of Cycles after Fault Inception | |||||
|---|---|---|---|---|---|
| 1 | 1.5 | 2 | 3 | ||
| Sample Number | 136 | 152 | 168 | 200 | 350 |
| Reactance | 2.58 | 2.42 | 2.53 | 2.49 | 2.55 |
| Takagi | 2.60 | 2.42 | 2.54 | 2.50 | 2.55 |
| Novosel | 2.54 | 2.39 | 2.50 | 2.46 | 2.50 |
| Number of Cycles after Fault Inception | |||||
|---|---|---|---|---|---|
| 1 | 1.5 | 2 | 3 | ||
| Sample Number | 247 | 263 | 279 | N/A | 263 |
| Reactance | 2.87 | 2.83 | 2.80 | - | 2.83 |
| Takagi | 2.86 | 2.84 | 2.80 | - | 2.84 |
| Novosel | 2.84 | 2.81 | 2.76 | - | 2.81 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Navalpakkam Ananthan, S.; Furlani Bastos, A.; Santoso, S.; Del Rosso, A. An Automated Technique for Extracting Phasors from Protective Relay’s Event Reports. Inventions 2018, 3, 81. https://doi.org/10.3390/inventions3040081
Navalpakkam Ananthan S, Furlani Bastos A, Santoso S, Del Rosso A. An Automated Technique for Extracting Phasors from Protective Relay’s Event Reports. Inventions. 2018; 3(4):81. https://doi.org/10.3390/inventions3040081
Chicago/Turabian StyleNavalpakkam Ananthan, Sundaravaradan, Alvaro Furlani Bastos, Surya Santoso, and Alberto Del Rosso. 2018. "An Automated Technique for Extracting Phasors from Protective Relay’s Event Reports" Inventions 3, no. 4: 81. https://doi.org/10.3390/inventions3040081
APA StyleNavalpakkam Ananthan, S., Furlani Bastos, A., Santoso, S., & Del Rosso, A. (2018). An Automated Technique for Extracting Phasors from Protective Relay’s Event Reports. Inventions, 3(4), 81. https://doi.org/10.3390/inventions3040081