1. Introduction
Human action recognition has been an active research topic due to its wide range of applications, including surveillance, healthcare, safety, transportation, human–computer interactions and response prediction [
1,
2]. Furthermore, with the continuous development of cost-effective RGB (Red–Green–Blue) [
3] and depth cameras [
4], inertial sensors [
5], and algorithms for real-time pose estimation, human action recognition receives growing attention nowadays. Comparing these types of capturing sensors, RGB cameras provide rich texture information but are sensitive to illumination changes. Otherwise, depth sensors provide 3D structural information of the scene but are sensitive to materials with different reflection properties while inertial sensors can work in an unconfined environment but are sensitive to the sensor location on the body [
6]. Although there are many different benefits from the use of all these sensors in numerous applications, access to 3D information and skeleton data brings unique advantages including robustness in action and gesture recognition. Specifically, through 3D skeletons, the set of connected body-joints that evolve in time can effectively be used for the representation and analysis of human behaviors.
To date (we present approaches that are most related to ours however, a comprehensive review of skeleton-based action recognition methodologies can be found in [
1]), most of the skeleton-based literature approaches [
1] consider human action recognition as a time series problem in which the input observations are the 3D locations of the major body joints at each frame. Thus, characteristics of body postures and their dynamics over time are extracted to represent a human action. One of the most used approaches for modeling of time-evolving data and specifically of human actions is the Hidden Markov Model (HMM) [
7,
8,
9], a graphical oriented method to characterize real-world observations in terms of state models. Single or multiple, they are often employed either for hand gesture recognition [
10] or human action recognition [
11]. Furthermore, Kosmopoulos et al. [
12] employed a Bayesian filter supported by hidden Markov models and used user’s feedback in the learning process to achieve online recognition.
Moreover, to model the temporal dynamics for action recognition, Xia et al. [
13] extracted histograms of 3D joint locations and used discrete HMMs. Another widely used technique is the Conditional Random Field (CRF) model [
14], which is an undirected graphical method that allows the dependencies between observations and the use of incomplete information about the probability distribution of a certain observable. However, these methods are incapable of identifying the representative patterns or modeling the structure of the data, thus, are lacking in discriminative power [
1]. Furthermore, CRF is a highly computationally complex model at the training stage of the algorithm, making it difficult for researchers to re-train the model.
To overcome the above limitations and since not all poses in video sequences of an action are informative for the classification of that action, researchers focus on the identification of key poses and localization of the action in an unsegmented stream of frames. Thus, Zhou et al. [
15] proposed the extraction of discriminative key poses represented by normalized joint locations, velocities and accelerations of skeleton joints, while Sharaf et al. [
16] extracted features based on the probability distribution of skeleton data and employed a pyramid of covariance matrices and mean vectors to encode the relationship between these features. To facilitate the recognition task, Meshry et al. [
17] encoded the position and kinematic information of skeleton joints proposing gesturelets, while Patrona et al. [
18] extended gesturelets by adding automatic feature weighting at frame level and employing kinetic energy to identify the most representative action poses. However, these methods often lead to the selection of unneeded key poses or the omission of salient points containing important action information.
Recently, deep learning networks have been employed in the automated classification of human actions, aiming to overcome the extraction of hand-crafted features and the discrimination limitations of previous methods through effective deep architectures. For action recognition, Du et al. [
19] proposed a hierarchical recurrent neural network for skeleton-based action recognition. They divided the human skeleton into five parts according to the human physical structure, and then separately fed them to five subnets. Furthermore, Hou et al. [
20], encoded the spatio-temporal information of a skeleton sequence into color texture images and employed convolutional neural networks to learn dynamic features for action recognition. Bilen et al. [
21] introduced dynamic images in combination with convolution networks and Chen et al. [
22] combined deep convolution neural networks with CRFs, to achieve action recognition and improved image segmentation.
Additionally, Recurrent Neural Networks (RNN) and Long Short-Term Memory (LSTM) have been proposed to model temporal relationships among frames [
23,
24,
25]. However, RNNs are incapable of capturing long-term dependencies between frames and skeletal joints in the spatial domain [
26]. Liu et al. [
26] used a spatio-temporal long short-term memory (ST-LSTM) network, to model the dynamics and dependency relations in both temporal and spatial domains. More recently, Konstantinidis et al. [
27] proposed a four stream LSTM neural network based on two types of spatial skeletal features and their corresponding temporal representations extracted by the Grassmannian Pyramid Descriptor. However, the training of these complex deep learning networks requires the creation of large datasets for the accurate definition of their parameters. Thus, although high accuracies have been achieved, these methods need large labeled datasets and incur high time cost for training [
28].
Significantly fewer works focus on action and gesture recognition adopting third-order tensor representations and modeling. Kim et al. [
29] formed third-order tensors and applied tensor canonical correlation analysis to perform action and gesture classification in videos while Vasilescu and Terzopoulos [
30] used higher-order tensors and their decompositions for face recognition. Koniusz, et al. [
31] defined kernels on 3D joint sequences, which are linearized to form kernel descriptors. Then, tensor representations were formed from these kernels and were used for action recognition. More recently, Dimitropoulos et al. [
32,
33] took advantage of the correlation between the different channels of data and proposed a stabilized higher order linear dynamical system to extract appearance information and dynamics of multidimensional patches. However, the last method requires high computational cost making real-time action recognition nearly impossible. Furthermore, one of the challenges in these methods is how data could be effectively represented and fed to the developed classification systems.
In this paper, we aim to address the problem of human action recognition through the encoding of the spatio-temporal information of a skeleton sequence and forming novel higher-order sparse tensors which describe 3D space relationship of joints. Through the decomposition of the tensor, we aim to overcome challenges, such as subject variations in performing actions and recognition in an unsegmented stream of frames, through the exploitation of the higher-order and hidden correlations between 3D coordinates of the body-joints and their temporal variations. Furthermore, we factor out the need for computationally costly operations, aiming to support daily living smart appliances and essential services offered to their end-users.
More specifically, this paper makes the following contributions: (a) We introduce a novel modeling of the skeleton time series sequences as higher-order sparse tensors to capture the dependencies among skeleton joints. Towards this end, a given sequence of the skeleton is represented by a third-order sparse tensor in which 3D coordinates corresponding to the joints are equal to one. (b) We adopt the higher order singular value decomposition of the formed tensor to exploit the correlations between body-joints. (c) We propose the extraction of a spatial and a temporal descriptor that is able to encode the global shape of action performers and motion of an action respectively. (d) We propose the fusion of the two descriptors adopting the discriminant correlation analysis (DCA). The proposed fused feature descriptor exploits the possibility of using third-order representations and their decompositions for 3D action recognition, which poses a different set of challenges. The final classification towards action recognition of the given sequence is obtained through the use of an artificial neural network. The proposed method improves the performance of action recognition, in terms of both positive detection rates (improving the average classification accuracy by 0.69%) and computational-time cost (achieving average classification in 0.42 s) making the proposed approach suitable for real-time applications. Finally, it can be combined with other local or global models; however, the goal of this paper is not to propose an ad-hoc algorithm, but an automated, fast, and robust approach through the sparse tensor modeling and its analysis for the support of the daily living action recognition applications.
The remainder of this paper is organized as follows: The next section presents the materials and methods used for the evaluation of the proposed methodology and for the automated human action recognition. Subsequently, experimental results are presented and discussed, while finally conclusions are drawn in the last section.
2. Materials and Methods
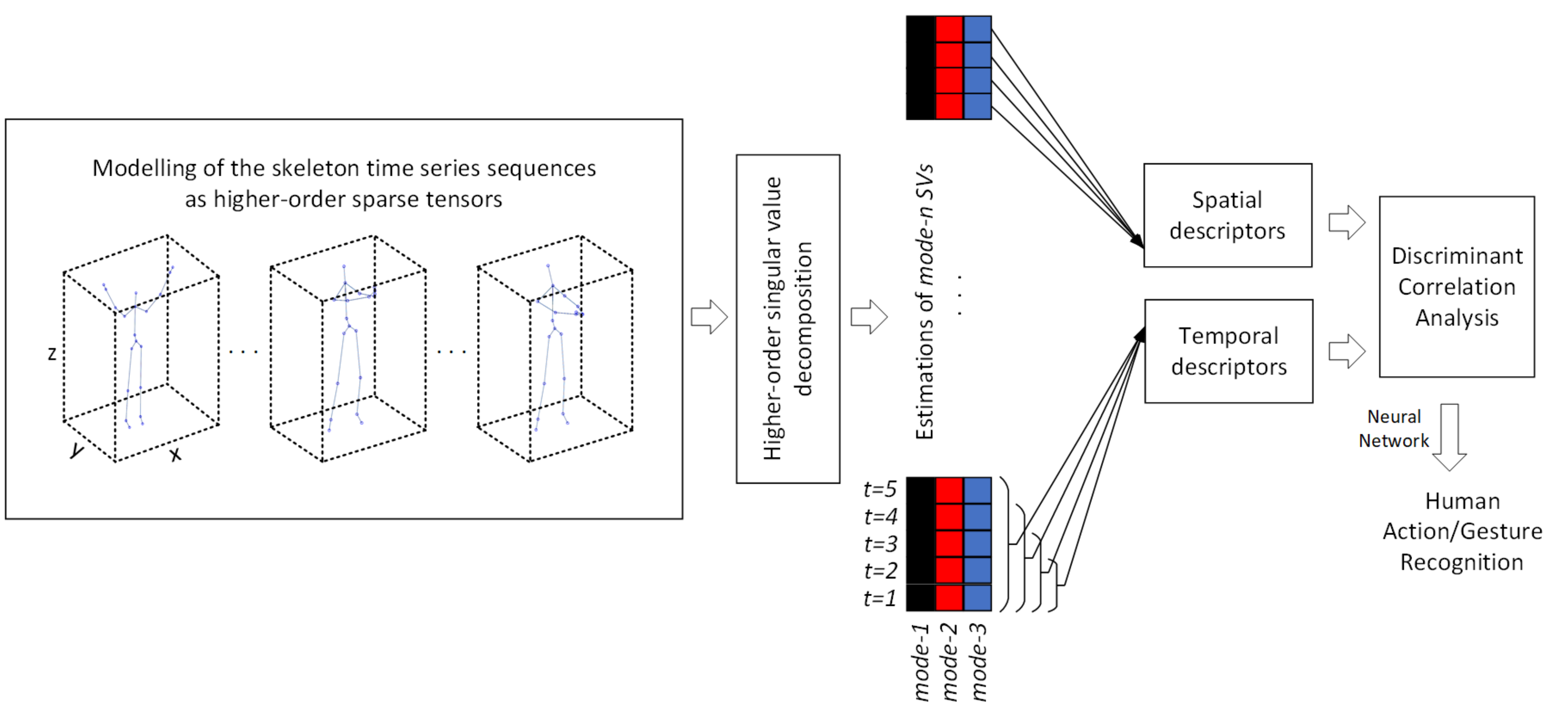
Skeleton sequences reflect the connectivity and topology of skeletal joints allowing the exploitation of both spatial time-evolving inter-correlated and intra-correlated patterns that are unique for each human action. Thus, for the modeling of different human actions, the creation of structures that will efficiently represent the spatial and temporal joints correlations play a key role. In the proposed methodology (
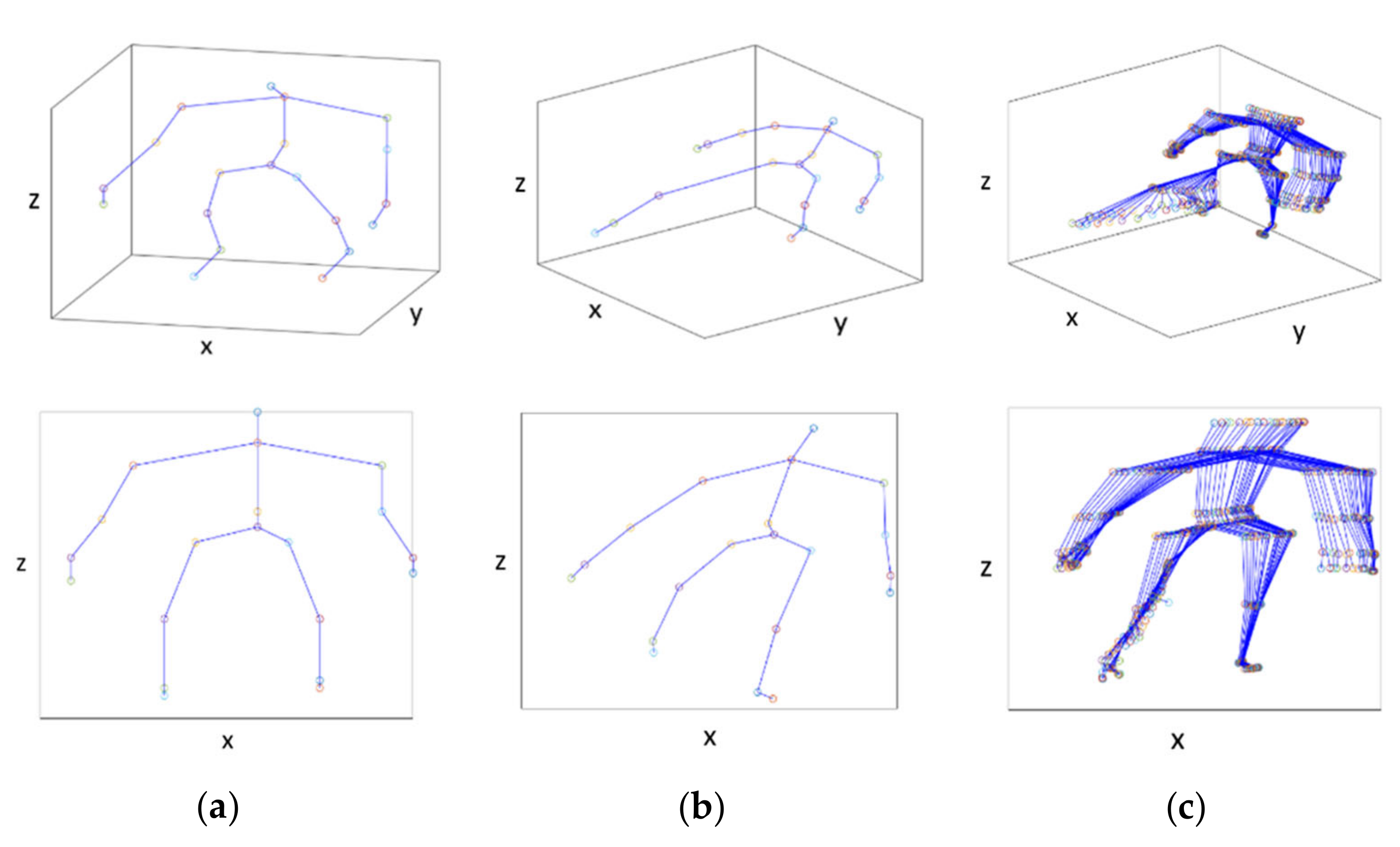
Figure 1), to exploit the spatial time-evolving dependencies among skeleton joints, we represent the skeleton time series sequences as high-order sparse structure tensors. This allows the estimation of two descriptors with regards to spatio-temporal complementary information to exploit the intra-correlations of skeleton joints (
Figure 2). For the estimation of the first descriptor, each skeleton frame is considered as a sparse binary tensor for which the elements that correspond to 3D skeletal joints’ coordinates are equal to one. In the second case for each frame, the tensor elements that correspond to 3D joints’ coordinates from the first frame to the examined frame are set equal to one. The corresponding dimensions for each tensor are
and
for the created tensor length, width, and height respectively. Then, to exploit the correlations between body-joints, we estimate their decompositions based on randomized subspace iteration. This enables the computation of the mode-n singular values of the sparse matrices with high accuracy. For the construction of feature vectors and to keep only the meaningful information and to reduce the complexity of data we use only the first ten singular values of each unfolded mode-
. The extracted features are combined using DCA. Finally, to recognize human action patterns a neural network is used.
More specifically, we represent each frame as a sparse third-order tensor
(
Table 1 contains the basic notations and their definitions). To compress the data, minimizing data loss, and significantly reduce its size we apply higher order singular value decomposition (Higher-Order SVD-HOSVD or Multi-Linear Singular Value Decomposition-MLSVD) using sequential truncation and a randomized SVD algorithm based on randomized subspace iteration [
34]. Furthermore, this allows the computation of singular values and vectors of large sparse matrices with high accuracy. Summarily, for each mode-n unfolding
of the sparse third-order tensor
we estimate a Gaussian random matrix
and we compute the
and its QR factorization so that it is
. Then, we form the matrix
and compute the corresponding singular value decomposition:
. Thus, the orthonormal matrices of the higher-order singular value decomposition are described by the Equation
. Therefore, the tensor
is written as the multilinear tensor-matrix product of
and
.
where,
is the core tensor, while
,
and
are orthogonal matrices containing the orthonormal vectors spanning the column space of the matrix and with the operator
denoting the
-mode product between a tensor and a matrix.
2.1. Modeling of Human Actions through Mode-n Singular Values
After obtaining the core tensor and the set of
matrices, we evaluated two modeling approaches for the extraction of a spatio-temporal features set. The key of a successful modeling is the automatic extraction of discriminative features. Thus, we calculate the mode-
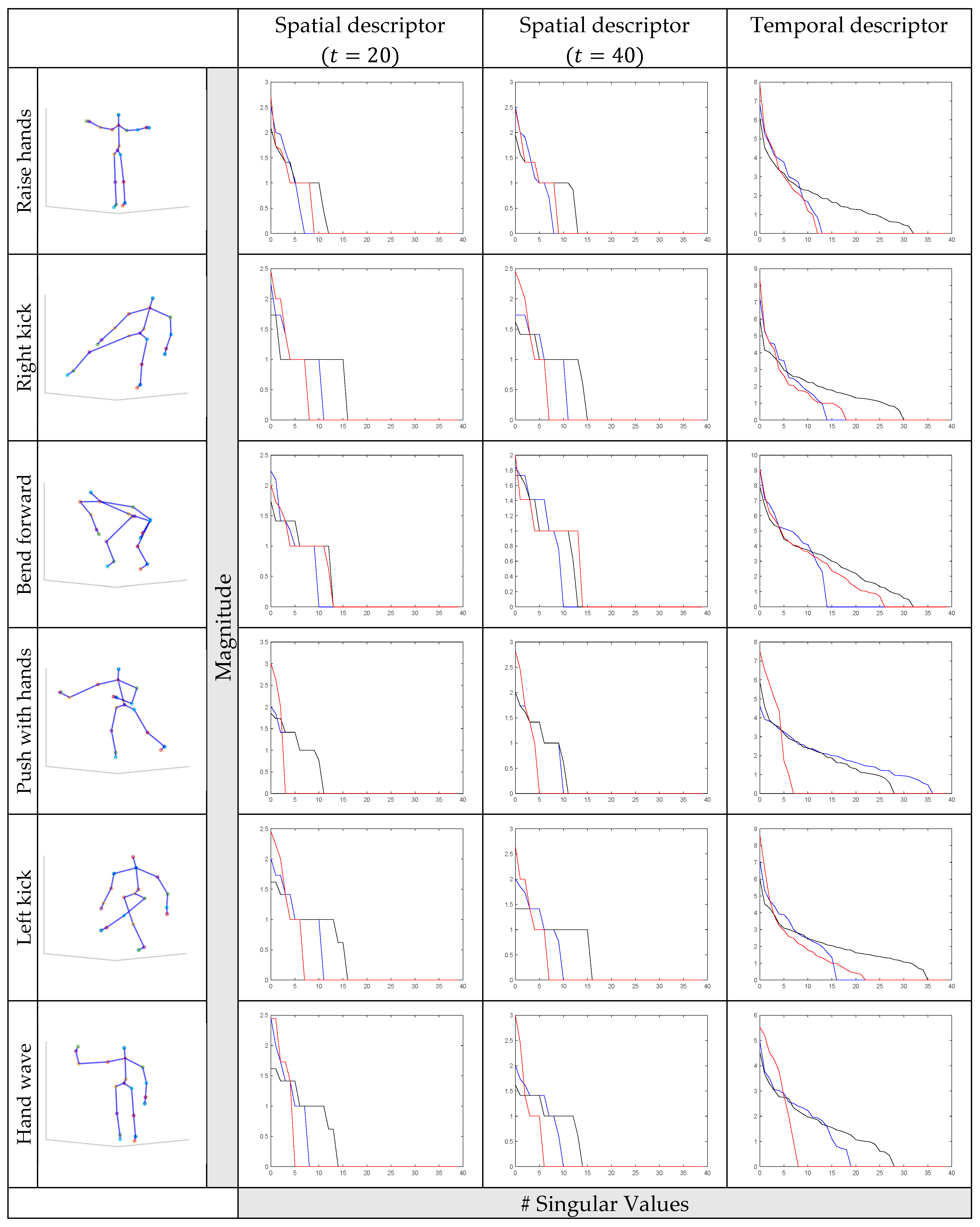
singular values (MSVs) of core tensor unfoldings extracting the topological and the time-evolving properties of tensors as shown in
Figure 3. These features can also be considered as artificial characteristics providing crucial measures [
35,
36]. Generally, the singular values are different for mode-
unfoldings but not completely independent.
Specifically, to model the spatial and the temporal inter-correlations and intra-correlations of skeletal joints in each frame, and by the assumption that spatio-temporal changes and action patterns are reflected by the sums of squared SVs, MSVs are computed using the core tensor
of each segment. Thus, the MSVs spatial descriptors, denoted as
, are given by:
where
,
and
are the sizes of n-mode dimensions and
are the elements of the core tensor. As a mode-n SV descriptor corresponds to each sequence frame, a total number of
spatial and
temporal descriptors are produced for each human action sequence. In our experiments, to keep only the meaningful information and to reduce the complexity of data, for the construction of feature vectors we used the first ten singular values of each unfolded submatrix. Then, we concatenated the reduced three mode MSVs into vectors for spatial and temporal representation for each frame respectively, as follows:
where
is the size of the descriptors after concatenation and following the use of the first ten singular values of each unfolded submatrix. Following the concatenation, we need to create a spatial and a temporal feature that will represent each human action sequence. To this end, we estimate two histogram representations by defining two different codebooks. Thus, we apply the bag of systems approach and use the k-means clustering method for the collection of
spatial and
temporal descriptors. Each codebook consists of
codewords corresponding to the
representative sequence frames. Hence, the set of codewords encode all kinds of spatial and temporal patterns. Then, using Euclidean distance and the representative codewords, each human action is represented as a term frequency histogram (
and
) of the predefined codeword of the MSVs. These vectors may be considered to represent the distinctive classes of the human actions. Comparing the results of
Figure 3 which show the variations of the SVs of each mode for the different actions, it is obvious that the SVs can be used as discriminating features for actions differentiation. Furthermore, we observe that singular values for mode-
unfoldings are not completely independent, but there are variations between neighboring singular values.
2.2. Feature Fusion through Discriminant Correlation Analysis and Classification
For the fusion of the extracted features, we adopted the DCA [
37,
38], a level fusion technique, that incorporates the class associations into the correlation analysis of the feature sets. Thus, we aim to maximize the pairwise correlations across the extracted spatial and temporal feature set. Simultaneously, we aim to eliminate the between-class correlations and to restrict the correlations to be within the different human actions. The DCA is a low computational complexity method, and it can be employed in real-time applications meeting the requirements of daily living applications.
In our problem,
and
denote the feature vector of each action for spatial and temporal analysis and are collected from
human action classes. Assuming that
denote the spatial feature vector corresponding to the
class and in
sample, then, the
and
denote the means of
vectors in the
class and the whole feature set, respectively. Thus, the between-class scatter matrix is defined as:
where
Then, to estimate the most significant eigenvectors of the covariance matrix
or
(if the number of features is higher that the number of classes) we calculate the transformations that diagonalize it.
where the
is the matrix of orthogonal eigenvectors and
is the diagonal matrix of real and non-negative eigenvalues sorted in decreasing order [
38]. Thus, if
consists of the
most significant eigenvectors then, the
most significant eigenvectors of
can be obtained with the mapping:
Thus, the
is the transformation that unitizes
and reduces the dimensionality of the data matrix,
, from
to
. That is
The new feature vector
is resulting from
Similarly, to the above, we estimate also the
for temporal analysis features
. Then, to make the features of the spatial feature set to have a nonzero correlation with their corresponding temporal feature sets, we diagonalize the between-set covariance matrix. To achieve this, we diagonalize the
applying singular value decomposition and estimating the
.
Furthermore, to unitize the between-set covariance matrix, we set
and
.
Thus, the features are transformed as follow:
where
and
are the transformation matrices for the extracted spatio-temporal feature vectors
and
, respectively.
Finally, for the classification of human actions, we used neural networks that have been proved [
39] a useful tool for various applications which require extensive classification. Specifically, we used MATLAB’s Neural Network Toolbox 11 and a two-layer feedforward network, with sigmoid transfer functions in both the hidden layer and the output layer. The number of hidden neurons was set to 10.
3. Results
In this section, we present a detailed experimental evaluation of the proposed methodology using three datasets. The goal of this experimental evaluation is three-fold: (a) Initially, we aim to define the number of MSVs that will be used for the evaluation, then (b) we want to show that the fusion of proposed descriptors improves the classification accuracy significantly, and finally (c) we intend to demonstrate the superiority of the proposed algorithm in human action recognition against a number of current state-of-the-art approaches.
To evaluate the proposed method we initially used the Centre for Research and Technology Hellas (CERTH) dataset [
32], which contains a relative small number of actions, i.e., six different actions (bend forward, left kick, right kick, raise hands, hand wave, and push with hands), performed by six subjects, each repeated ten times (i.e., 360 actions in total). With regards to the CERTH dataset, we used 6 instances of each action per subject for training and 4 instances for testing. Furthermore, we used the well-known G3D dataset [
40], containing a large range of gaming actions, i.e., 20 gaming actions (punch right, punch left, kick right, kick left, defend, golf swing, tennis swing forehand, tennis swing backhand, tennis serve, throw bowling ball, aim and fire gun, walk, run, jump, climb, crouch, steer a car, wave, flap, and clap), repeated three times by ten subjects (i.e., 600 actions in total). With regards to the G3D dataset, we used 1 instance of each action per subject used for training and 2 instances of each action for testing. Finally, we used the Microsoft Research Cambridge (MSRC)-12 Kinect Gesture Dataset [
41] which consists of 12 gestures (kick, beat both, change weapon, had enough, throw, bow, shoot, wind it up, googles, punch right, duck and start system) performed by 30 people. In all experimental results, we split the datasets into training and testing subsets based on [
32] and on [
27]. Specifically, to have a fair comparison in CERTH and G3D datasets the training and testing sets based on [
32] were used (i.e., for CERTH dataset, we used six instances of each action per subject for training and four instances for testing and for G3D dataset, one instance of each action per subject used for training and two instances of each action for testing). For the evaluation of MSRC-12 dataset, we followed two different protocols: initially, 37% of the dataset was used for training and 63% for testing based on [
32] (
Table 2—MSRC-12
1) and secondly a modality-based “leave-persons out” protocol was used as proposed in [
27] (
Table 2—MSRC-12
2). In the second case, for each of the instruction modalities of MSRC-12 dataset, the ‘leave-persons-out’ protocol was adopted, keeping the minimum subject subset containing all the gestures as the test set and employing all the others for training.
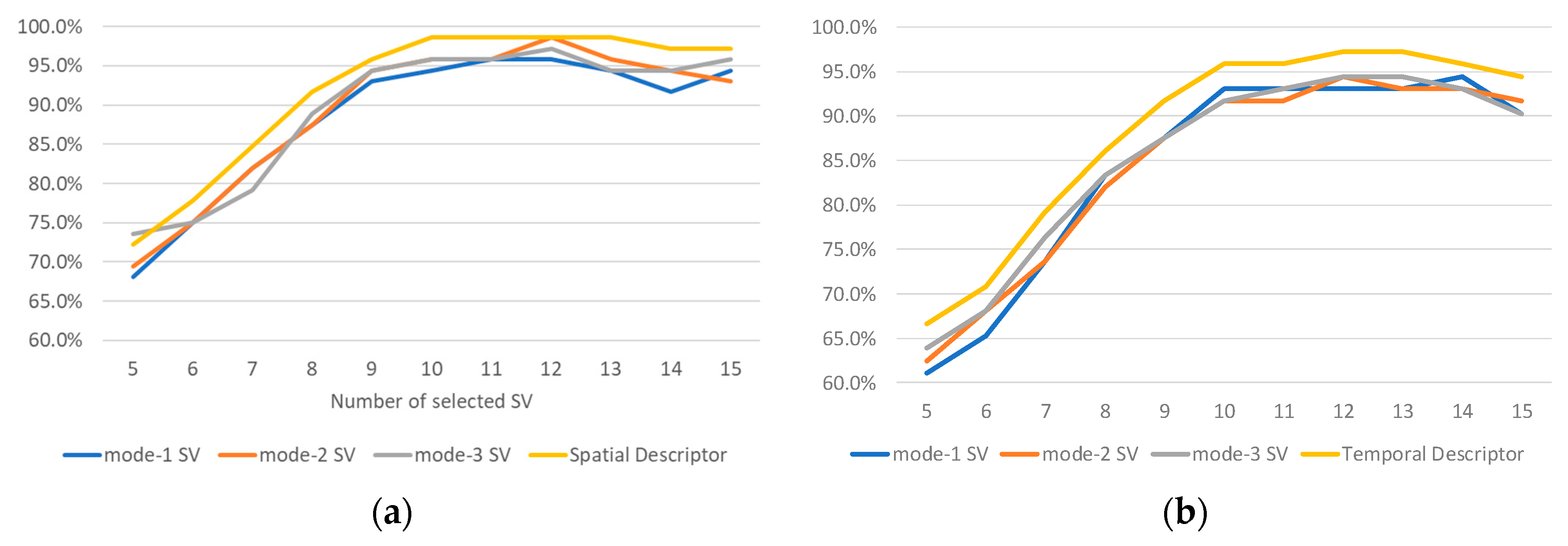
3.1. Defining the Number of MSVs
The selection of the number of MSVs is based on the contribution of each mode-
singular value to the recognition results for the proposed spatial and temporal descriptors. Specifically, we compared the proposed method results using the first five to fifteen SVs. We used the CERTH dataset to run the experiments. As one can easily see in
Figure 4 using more than 10 SVs does not lead to any significant improvement in the recognition results. Furthermore, as was expected from observing
Figure 3, the use of a low number of SVs results in low recognition rates. This is related to the first values of SVs that are similar to each other. Significant differences in values are observed between the eighth and the twelfth SVs where better results are achieved.
3.2. Contribution of Different Feature Representations and Fusion Results
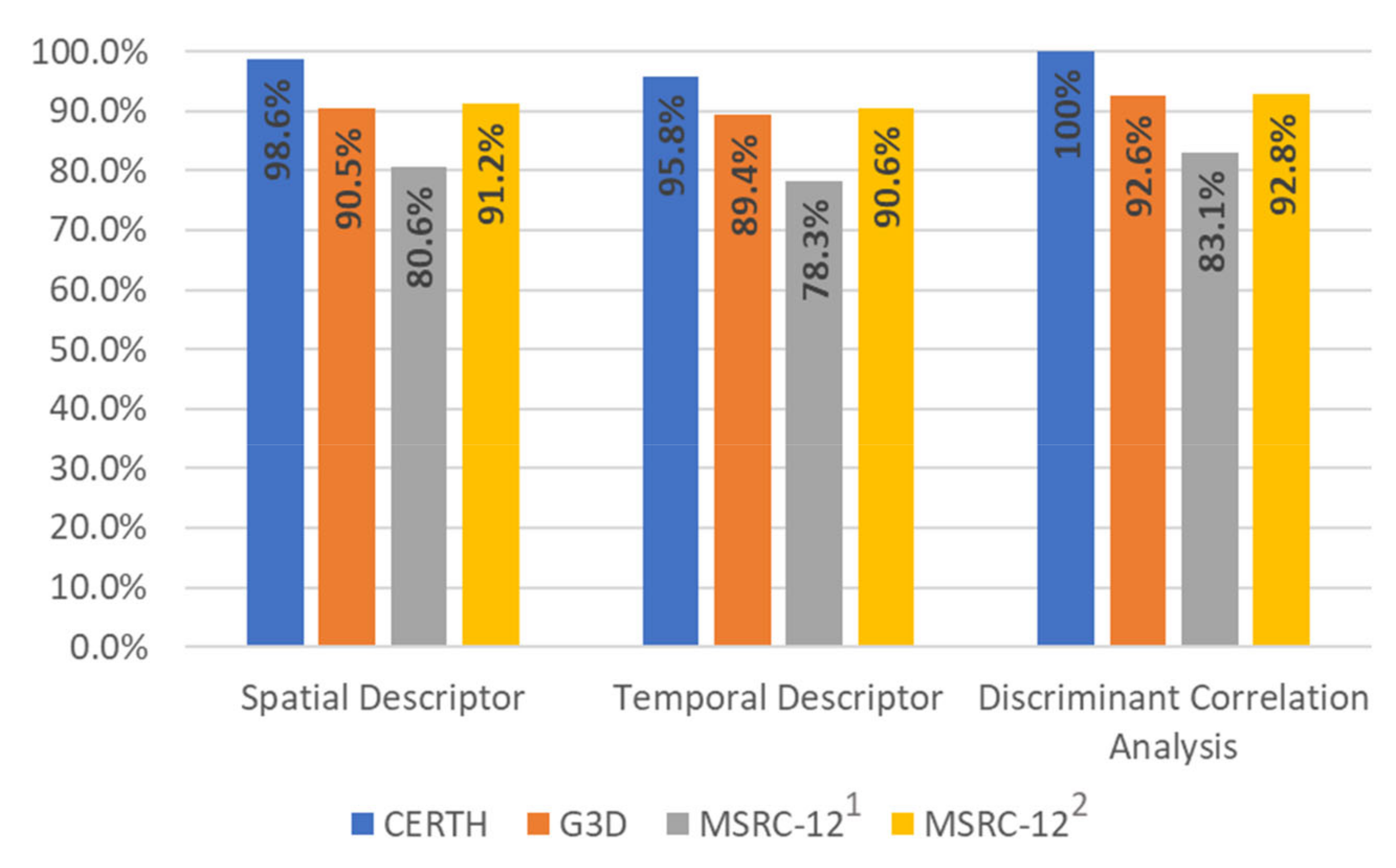
In this subsection, we elaborate a more detailed analysis to evaluate the contribution of different feature representations to the human action recognition. Specifically, we analyze the contribution of the two different descriptors, and we aim to show that the fusion of these features can improve the recognition rates. For the classification of the human actions, in the first case, we used the proposed spatial descriptor that achieves 98.6% and 90.5% for CERTH, G3D, and MSRC-12 datasets respectively. In the second case, we used the temporal descriptor that achieves lower accuracy rates than the spatial descriptor and achieves 95.8% and 89.4% for the two datasets. The performance of the proposed DCA method and the explanation of how the different descriptors contribute to classification rates are shown in
Figure 5. It is clear that the fusion approach using the proposed spatial and temporal descriptors and a neural network for classification achieves 100%, 92.6%, and 83.1% classification rates for CERTH, G3D, and MSRC-12 datasets, respectively. The accuracy rates make evident that the individual feature representations contain complementary information and, therefore, the detection accuracy after fusion is increased.
3.3. Comparison with State-of-the-Art Approaches
Finally, we evaluated the performance of the proposed methodology against other state-of-the-art techniques, and the comparison is shown in
Table 2.
Table 2 presents the classification rates of the proposed method against nine other state-of-the-art algorithms, i.e., dynamic time warping [
42], HMMs [
8], restricted Boltzmann machine [
43], CRFs [
14], Histograms of Grassmannian Points [
33], pyramid of covariance matrices and mean vectors [
16], Bags of Gesturelets [
17], Extended Gesturelets [
18], and LSTM and Grassmannian Pyramids [
27], on the three datasets. To have a fair comparison, we used the joints coordinates as an input signal for all algorithms. Obviously then, for the CERTH and G3D datasets, our proposed new method outperforms previously presented action recognition approaches. More specifically, our methodology improves the state-of-the-art results by 1.39% and 0.22% for these datasets respectively. Moreover, from
Table 2, it can be observed that our methodology outperforms the state-of-the-art methodologies in MSRC-12 dataset when the protocol based on [
32] was followed. However, employing the modality-based “leave-persons out” protocol, the proposed approach shows slightly lower recognition rates from the LSTM and Grassmannian Pyramids method. It can be explained by the fact that in this method, a meta-learner step which takes advantage of the meta-knowledge is applied. However, as it is observed from the recognition results in G3D dataset, it does not work efficiently in the cases that training datasets are small. In contrast, the proposed method works better in these cases aiming to support efficiently daily living action recognition applications that use small training sets (e.g., safety and security in home appliances). Furthermore, the proposed method achieves action recognition in far less than half a second (the average time—in a Core i5, 8 GB RAM, 2 GB Internal Graphics Card—for the extraction of feature vector and classification was estimated in 0.42 s) making it suitable for real-time applications, which could not be achieved using deep learning techniques.
4. Discussion and Conclusions
In this paper, we presented a novel methodology for human action recognition. The main advantage of the proposed approach is that it exploits the spatio-temporal inter-correlations between skeleton joints in different actions by extracting feature representations that contain complementary information. More specifically, to exploit the spatial and time-evolving information as well as to better model human motion correlations, we use a third-order tensor structure, and then we extract different feature representations containing complementary information with regards to the spatial and temporal correlations of the signals. Subsequently, we extracted feature representations based on higher-order singular value decompositions and mode-n singular values. Furthermore, the experimental results in
Figure 5 show that the combination of descriptors using DCA and a neural network significantly increase the detection rates of individual feature representations. We notice that the fusion approach provides excellent results in both CERTH, G3D, and MSRC-12 datasets.
The proposed method can significantly enhance the accuracy of human action recognition and support modern daily living through the action recognition services offered to end-users. Even when the number of classes increases, the discrimination ability of the method remains higher than other methods. This is mainly because we use intra-correlation information associated with the spatial distribution of joints, while we aim to combine it with the time-evolving information of the actions encoded in the descriptors.
However, in the MSRC-12 dataset, the discrimination ability of the extracted features is lower than the other datasets. This can be explained by the fact that there is a high intra-class variation of the dataset. To overcome this, a weighted approach for automatic adjustment of selected mode- SVs could be employed. Furthermore, a meta-learner that would take the advantage of the meta knowledge would achieve better results. Furthermore, some misclassifications in the G3D dataset are explained by the fact that there are actions during which most of their human skeleton joints remain almost in the same position. Thus, the extracted features lose the high ability to distinguish these actions. To overcome this limitation in the future, we aim to create subsets of joints and to apply the proposed algorithm in the different subsets weighting the extracted features.
In the future, we aim to evaluate the proposed methodology in more databases (e.g., JHMDB [
44] and in Human3.6M [
45]) to assess the effectiveness of the proposed methodology. Based on the extracted results and the number of actions (21 and 17 for the two datasets respectively) we believe that the extracted features will have the ability to accurately discriminate the actions that are included in the datasets.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}