New Adaptive Control Strategy for a Wind Turbine Permanent Magnet Synchronous Generator (PMSG)


Abstract
:1. Introduction
2. Aims and Objectives
3. Proposed Sensorless Control Algorithm
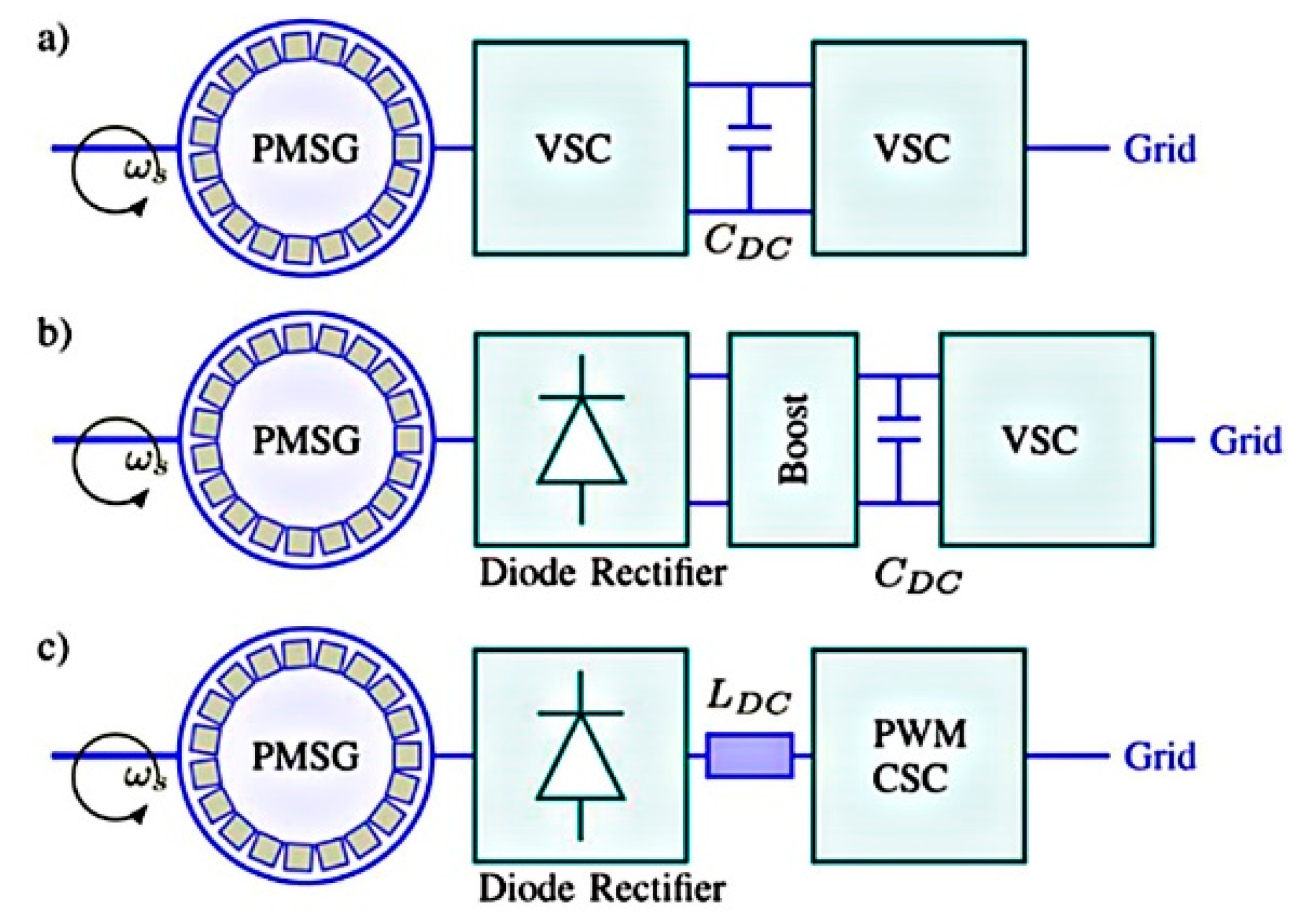
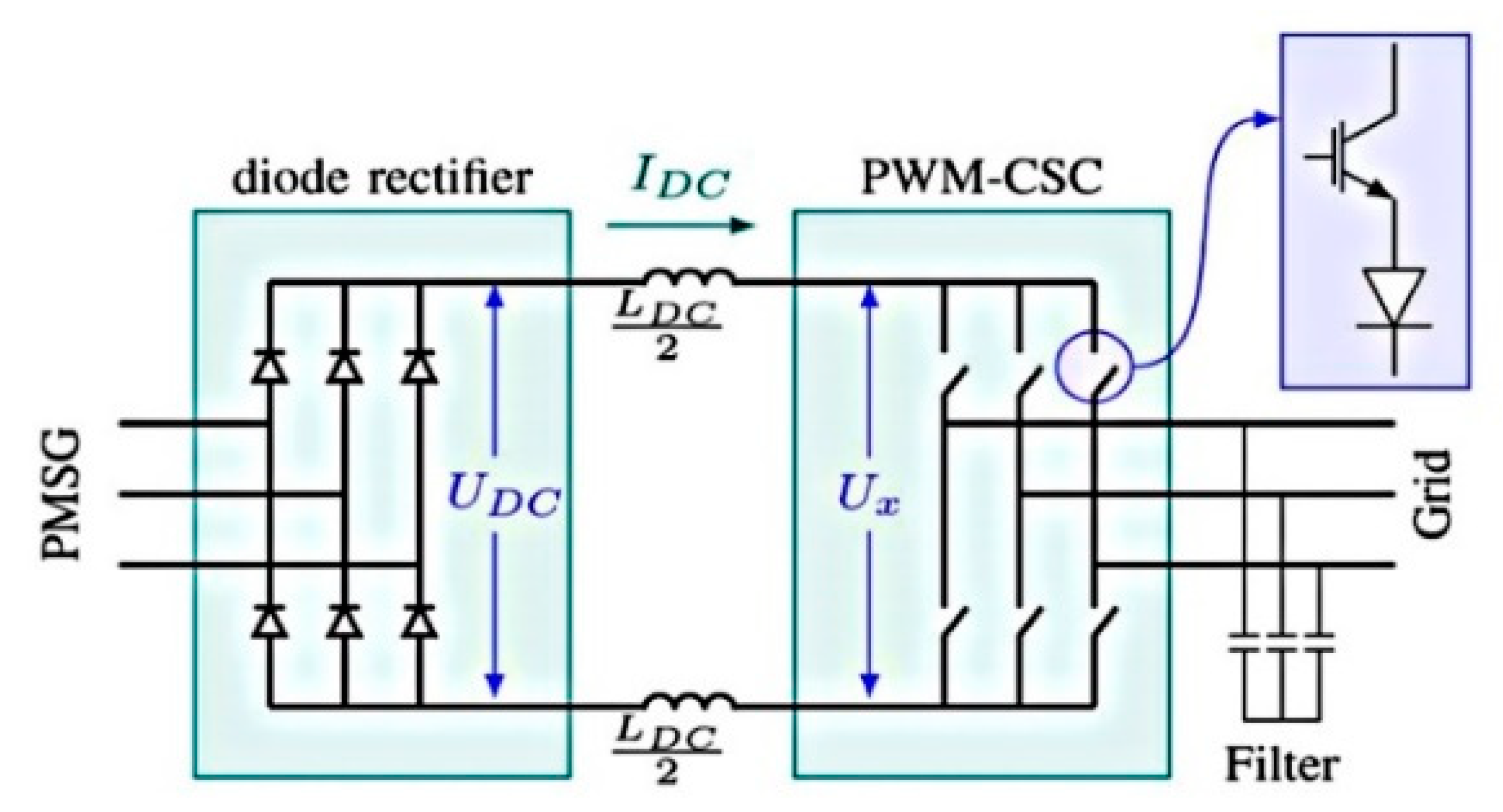
3.1. Configrations of PMSGs
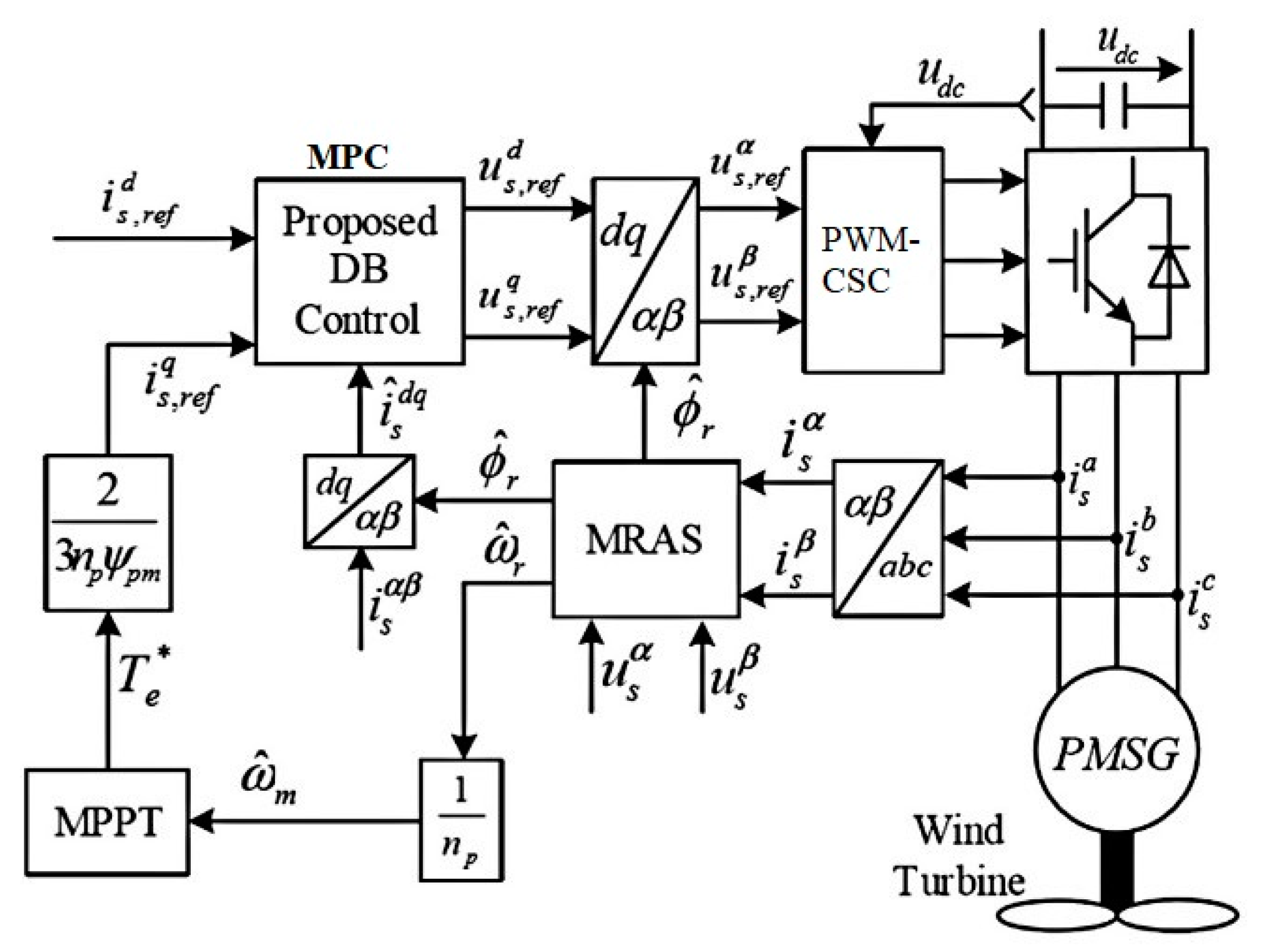
3.2. The Proposed Sensorless and Adaptive Control Method
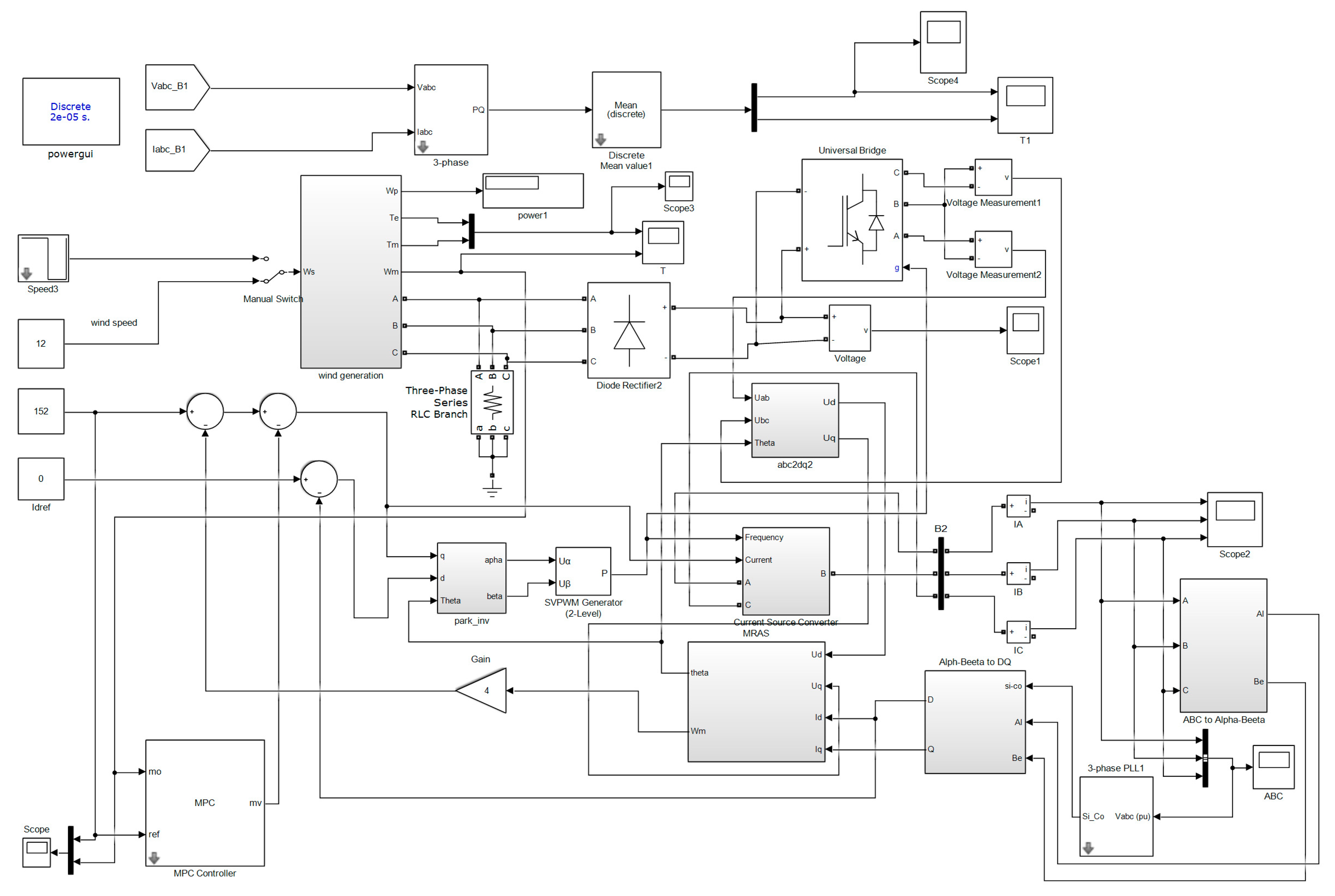
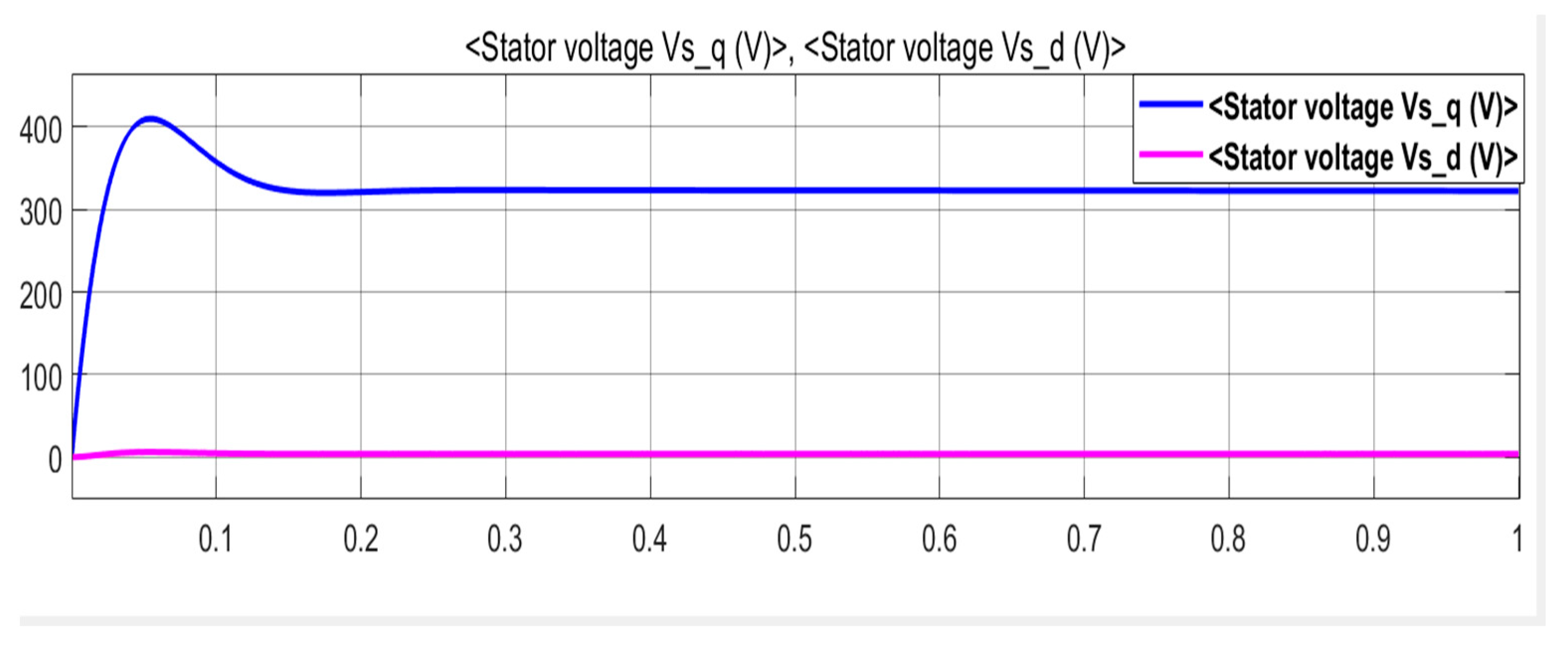
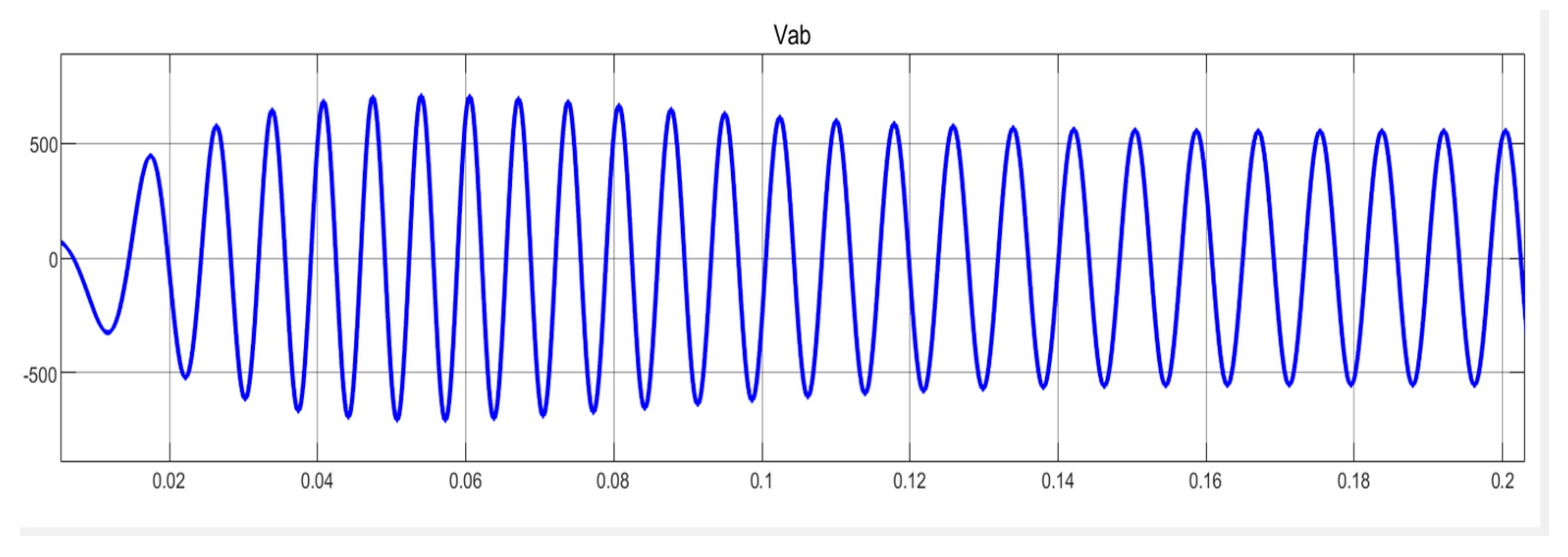
4. Simulation Results
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Blaabjerg, F.; Chen, Z. Power electronics for modern wind turbines. Synth. Lect. Power Electron. 2006, 1, 1–68. [Google Scholar] [CrossRef]
- Arshad, M.; O’Kelly, B.C. Offshore wind-turbine structures: A review. Proc. Inst. Civ. Eng. Energy 2013, 166, 139–152. [Google Scholar] [CrossRef]
- Failla, G.; Arena, F. New perspectives in offshore wind energy. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2015, 373, 20140228. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Arrambide, I.; Zubia, I.; Madariaga, A. Critical review of offshore wind turbine energy production and site potential assessment. Electr. Power Syst. Res. 2019, 167, 39–47. [Google Scholar] [CrossRef]
- WWEA. Wind Power Capacity Worldwide Reaches 597 GW, 50, 1 GW Added in 2018. Available online: https://wwindea.org/blog/2019/02/25/wind-power-capacity-worldwide-reaches-600-gw-539-gw-added-in-2018/ (accessed on 25 February 2019).
- Dai, J. Current Source Converters for Megawatt Wind Energy Conversion Systems. Ph.D. Dissertation, Ryerson University, Toronto, ON, Canada, 2010. [Google Scholar]
- Lang, Y.; Wu, B.; Zargari, N. A high-power current source converter based wind energy system. IEEE Trans. Ind. Appl. 2008, 55, 2786–2797. [Google Scholar]
- Li, Y.; Zhu, H. Sensorless control of permanent magnet synchronous motor—A survey. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference (VPPC), Harbin, China, 3–5 September 2008. [Google Scholar]
- Singh, S.; Anvari-Moghaddam, A. Sensor-based and sensorless vector control of PM synchronous motor drives: A comparative study. In Proceedings of the 2018 IEEE 4th Southern Power Electronics Conference (SPEC), Singapore, 10–13 December 2018; pp. 1–6. [Google Scholar]
- Sun, Y.; Preindl, M.; Sirouspour, S.; Emadi, A. Unified wide-speed sensorless scheme using nonlinear optimization for IPMSM drives. IEEE Trans. Power Electron. 2017, 32, 6308–6322. [Google Scholar] [CrossRef]
- Zhao, H.; Wang, Z.; Xu, Y. A new speed sensorless controller based on double observers for permanent-magnet synchronous motor. In Proceedings of the 2016 8th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 27–28 August 2016; pp. 401–404. [Google Scholar]
- Giri, F. (Ed.) AC Electric Motors Control: Advanced Design Techniques and Applications; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2013. [Google Scholar]
- Nahid-Mobarakeh, B.; Meibody-Tabar, F.; Sargos, F.-M. Back-EMF estimation based sensorless control of PMSM: Robustness with respect to measurement errors and inverter irregularities. In Proceedings of the Conference Record of the 2004 IEEE Industry Applications Conference, 2004. 39th IAS Annual Meeting, Seattle, WA, USA, 3–7 October 2004; pp. 1858–1865. [Google Scholar]
- Hassan, M.A.; Mahgoub, O.; El Shafei, A. ANFIS based MRAS speed estimator for sensorless control of PMSM. In Proceedings of the 2013 Brazilian Power Electronics Conference, Gramado, Brazil, 27–31 October 2013; pp. 828–835. [Google Scholar]
- Mishra, A.; Mahajan, V.; Agarwal, P.; Srivastava, S.P. MRAS based estimation of speed in sensorless PMSM drive. In Proceedings of the 2012 IEEE Fifth Power India Conference, Murthal, India, 19–22 December 2012; pp. 1–5. [Google Scholar]
- Xiao, D.; Guan, D.Q.; Rahman, M.F.; Fletcher, J. Sliding mode observer combined with fundamental PWM excitation for sensorless control of IPMSM drive. In Proceedings of the IECON 2014—40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 895–901. [Google Scholar]
- An, L.; Franck, D.; Hameyer, K. Sensorless field oriented control using back-EMF and flux observer for a surface mounted permanent magnet synchronous motor. Int. J. Appl. Electromagn. Mech. 2014, 45, 845–850. [Google Scholar] [CrossRef]
- Nagarajan, V.S.; Balaji, M.; Kamaraj, V. Back-emf-based sensorless field-oriented control of PMSM using neural-network-based controller with a start-up strategy. Adv. Intell. Syst. Comput. 2015, 325, 449–457. [Google Scholar]
- Mesbahi, A.; Raihani, A.; Bouattane, O.; Saad, A.; Khafallah, M. Extended Kalman Filter for characterizing a wind energy conversion system based on variable speed permanent magnet synchronous generator. In Proceedings of the 2014 International Renewable and Sustainable Energy Conference (IRSEC), Ouarzazate, Morocco, 17–19 October 2014. [Google Scholar]
- Fortuna, L.; Giannone, P.; Graziani, S.; Xibilia, M.G. Virtual instruments based on stacked neural networks to improve product quality monitoring in a refinery. IEEE Trans. Instrum. Meas. 2007, 56, 95–101. [Google Scholar] [CrossRef]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives; Wiley—IEEE Press: New York, NY, USA, 2012; Volume 40. [Google Scholar]
- Rodriguez, J.R.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the art of finite control set model predictive control in power electronics. IEEE Trans. Ind. Inform. 2013, 9, 1003–1016. [Google Scholar] [CrossRef]
- Gao, J.; Liu, J.; Gong, C. A high-efficiency PMSM sensorless control approach based on MPC controller. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 2171–2176. [Google Scholar] [CrossRef]
- Funabashi, T. Chapter 1: Introduction. In Integration of Distributed Energy Resources in Power Systems; Academic Press: Cambridge, MA, USA, 2016; pp. 1–14. [Google Scholar]
- Yaramasu, V.; Wu, B. Predictive control of a three-level boost converter and an NPC inverter for high-power PMSG-based medium voltage wind energy conversion systems. IEEE Trans. Power Electron. 2014, 29, 5308–5322. [Google Scholar] [CrossRef]
- WindML. How Do the Wind Turbines Work? Available online: https://www.windml.org/how-do-the-wind-turbines-work/ (accessed on 22 April 2020).
- Giraldo, E.; Garces, A. An adaptive control strategy for a wind energy conversion system based on PWM-CSC and PMSG. IEEE Trans. Power Syst. 2014, 29, 1446–1453. [Google Scholar] [CrossRef]
- Yang, S.; Xiang, D.; Bryant, A.; Mawby, P.; Ran, L.; Tavner, P. Condition monitoring for device reliability in power electronic converters: A review. IEEE Trans. Power Electron. 2010, 25, 2734–2752. [Google Scholar] [CrossRef]
- Bai, Z.; Zhang, Z.; Ruan, X. A natural soft-commutation PWM scheme for current source converter and its logic implementation. IEEE Trans. Ind. Electron. 2011, 58, 2772–2779. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.M.; Kennel, R. Simplified model predictive current control without mechanical sensors for variable-speed wind energy conversion systems. Electr. Eng. 2017, 99, 367–377. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Sensorless control of doubly-fed induction generators in variable-speed wind turbine systems. In Proceedings of the 2015 International Conference on Clean Electrical Power (ICCEP), Taormina, Italy, 16–18 June 2015; pp. 406–413. [Google Scholar]
- Morel, F.; Lin-Shi, X.; Retif, J.-M.; Allard, B.; Buttay, C. A comparative study of predictive current control schemes for a permanent-magnet synchronous machine drive. IEEE Trans. Ind. Electron. 2009, 56, 2715–2728. [Google Scholar] [CrossRef] [Green Version]
- Lopez-Ortiz, E.N.; Campos-Gaona, D.; Moreno-Goytia, E. Modelling of a wind turbine with permanent magnet synchronous generator. In Proceedings of the 2012 North American Power Symposium (NAPS), Champaign, IL, USA, 9–11 September 2012; pp. 1–6. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Rated power P (W) | 6000 |
| Base power of the generator S (VA) | 9444.44 |
| Base wind turbine speed (m/s) | 12 |
| Rated speed ω (rad/s) | 153 |
| Stator resistance R (Ω) | 0.425 |
| No. of the pole pair | 5 |
| Rotor flux linkage (Wb) | 0.433 |
| Inertia J (kg m2) | 0.01197 |
| Armature inductance L (H) | 0.000395 |
| Stator inductance L (H) | 0.000835 |
| Viscous damping F (N·m·s) | 0.001189 |
| The density of air ρ (kg m3) | 1.225 |
| Area swept by blades A (m2) | 1.06 |
| Types of Control Methods | T = 1 | T = 2 | T = 3 |
|---|---|---|---|
| Without active control method | 6143 | 6016 | 5974 |
| MRAS control method | 6132 | 6056 | 6078 |
| Proposed MPC-MRAS method | 6123 | 6120 | 6241 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, W.; Xing, N.; Wen, Y.; Chen, X.; Wang, D. New Adaptive Control Strategy for a Wind Turbine Permanent Magnet Synchronous Generator (PMSG). Inventions 2021, 6, 3. https://doi.org/10.3390/inventions6010003
Cao W, Xing N, Wen Y, Chen X, Wang D. New Adaptive Control Strategy for a Wind Turbine Permanent Magnet Synchronous Generator (PMSG). Inventions. 2021; 6(1):3. https://doi.org/10.3390/inventions6010003
Chicago/Turabian StyleCao, Wenping, Ning Xing, Yan Wen, Xiangping Chen, and Dong Wang. 2021. "New Adaptive Control Strategy for a Wind Turbine Permanent Magnet Synchronous Generator (PMSG)" Inventions 6, no. 1: 3. https://doi.org/10.3390/inventions6010003
APA StyleCao, W., Xing, N., Wen, Y., Chen, X., & Wang, D. (2021). New Adaptive Control Strategy for a Wind Turbine Permanent Magnet Synchronous Generator (PMSG). Inventions, 6(1), 3. https://doi.org/10.3390/inventions6010003