
A Robust Interval Type-2 Fuzzy Logic Controller for Variable Speed Wind Turbines Based on a Doubly Fed Induction Generator

 ,
,  ,
,
Abstract
:1. Introduction
2. WEC System Model
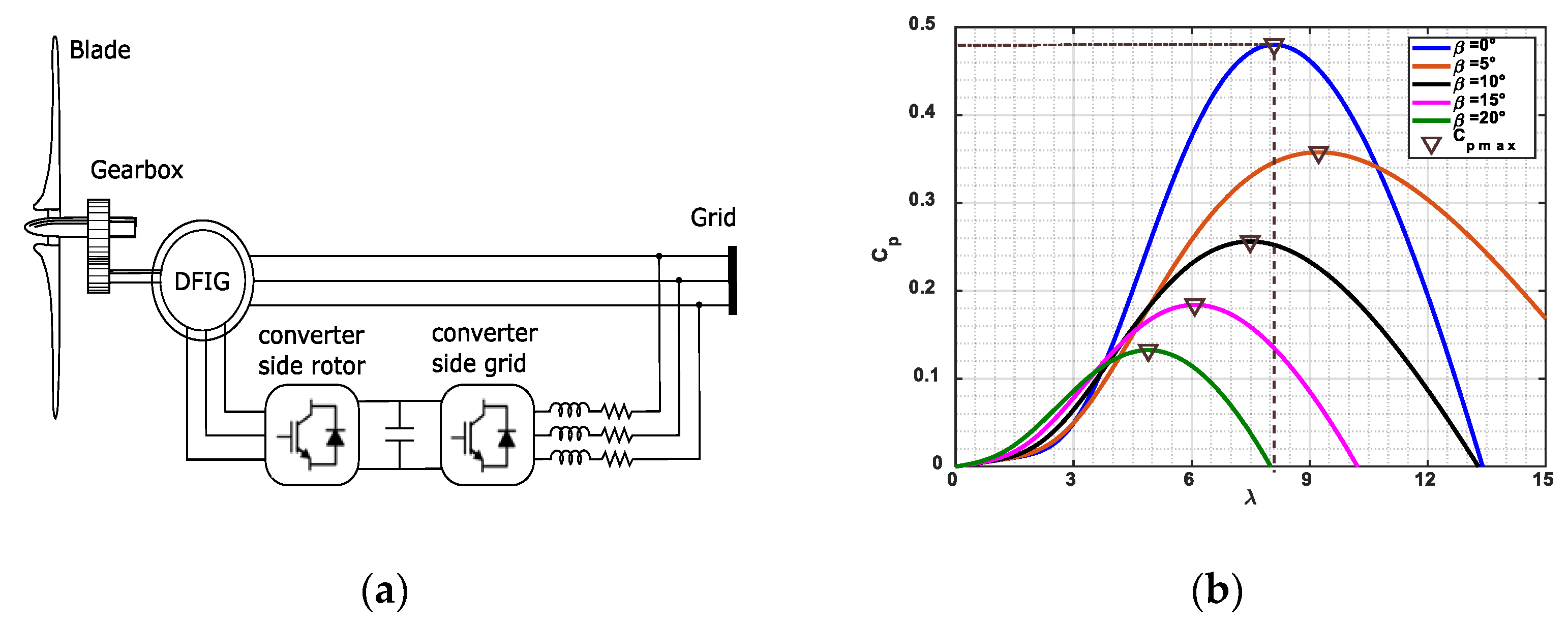
2.1. Modeling of the Wind Turbine
2.2. Modeling of DFIG
2.3. Description of Fuzzy Logic SETs
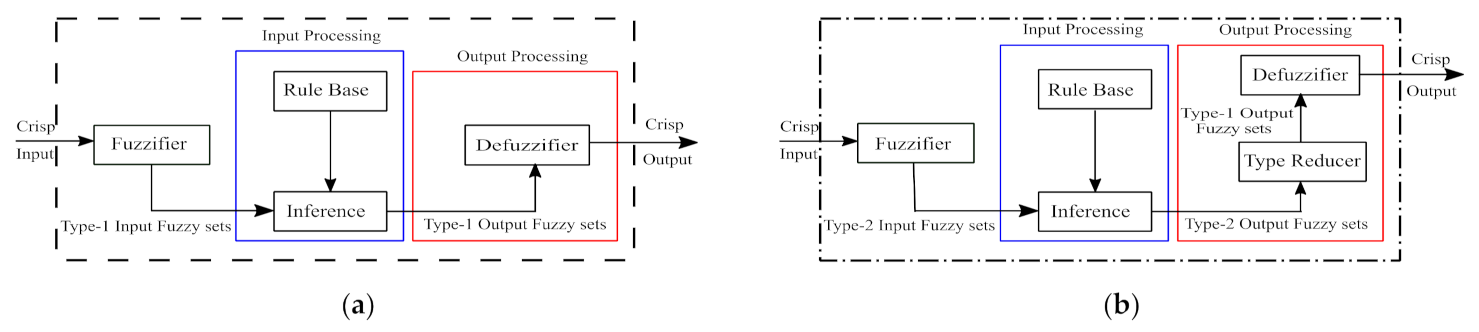
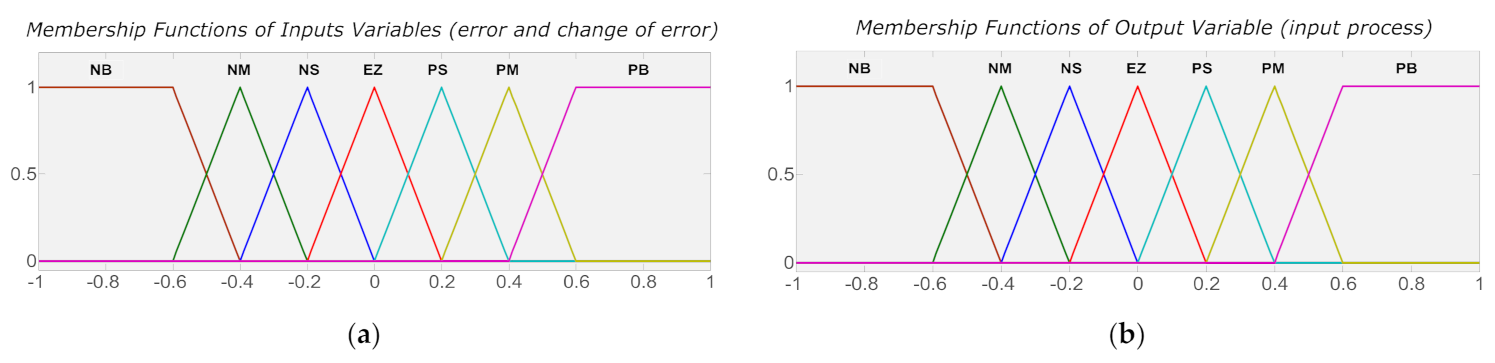
2.3.1. Overview of Type-1 Fuzzy Logic Sets (T1-FLS)
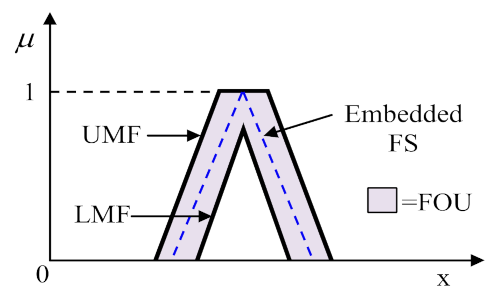
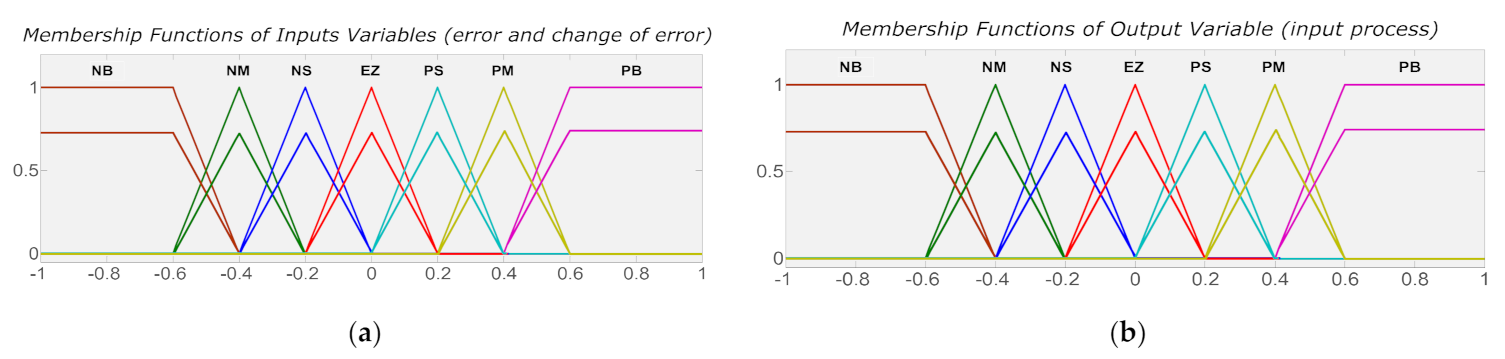
2.3.2. Basic Concepts of Interval Type-2 Fuzzy Logic Sets (IT2-FLS)
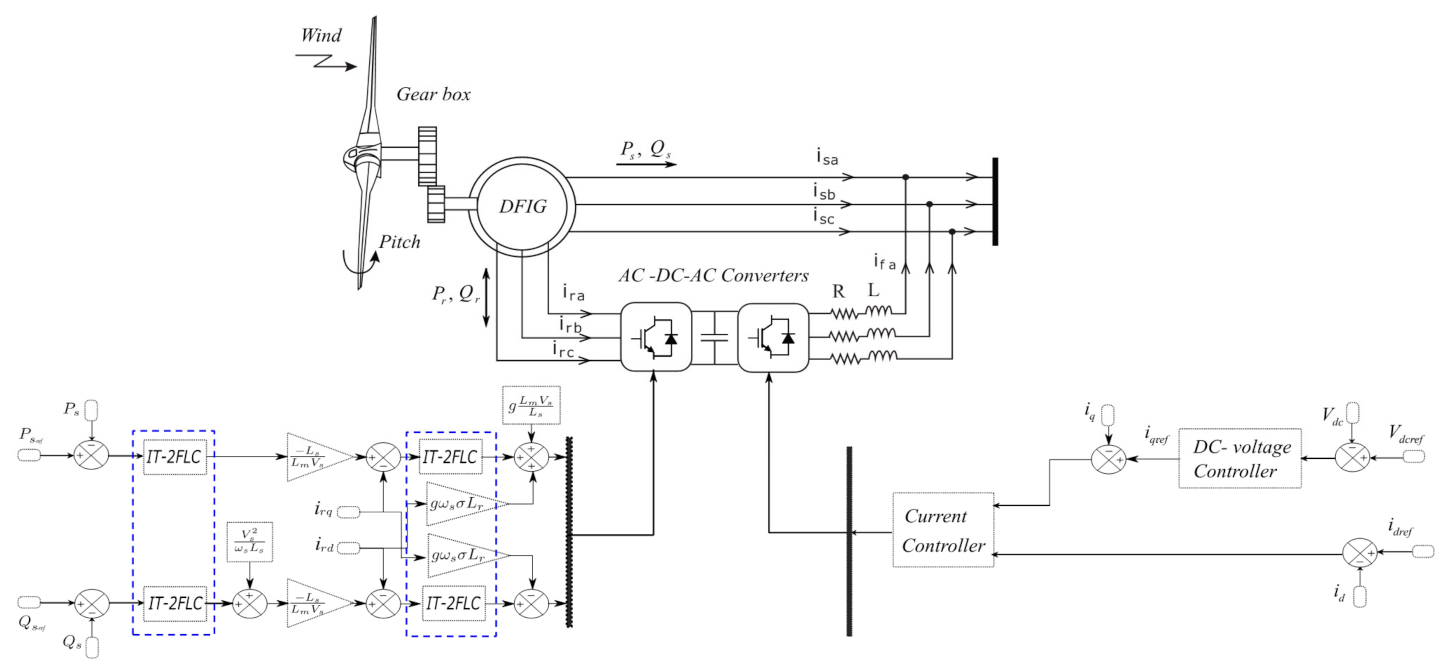
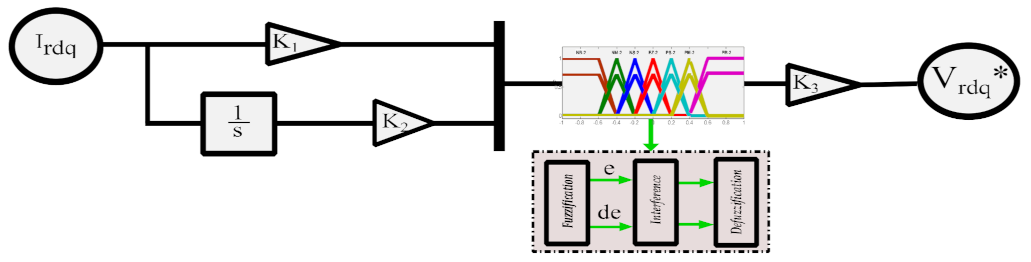
2.3.3. Control of Doubly Fed Induction Generator Using IT2-FL
- -
- The fuzzifier stage is used to translate inputs (real values) to fuzzy values.
- -
- The inference (reasoning) stage consists of two blocks, the rules base and the inference engine; it works the same way as for type-1 fuzzy systems, except the antecedents’ fuzzy sets and the consequent are represented by type-2 fuzzy sets.
- -
- The process consists of combining the rules base to produce a mapping from input to the output type-2 fuzzy set [23]. It is necessary to calculate the intersection, union and composition of type-2 relations in order to realize this mapping.
- -
- The type reducer is used to convert all type-2 fuzzy sets into a type-1 fuzzy set on the output. There are several methods to calculate the reduced set, such as joint center, center of sums, height, and center joint, among others [24].
- -
- The defuzzification stage translates an output into precise values.
3. Simulation Results
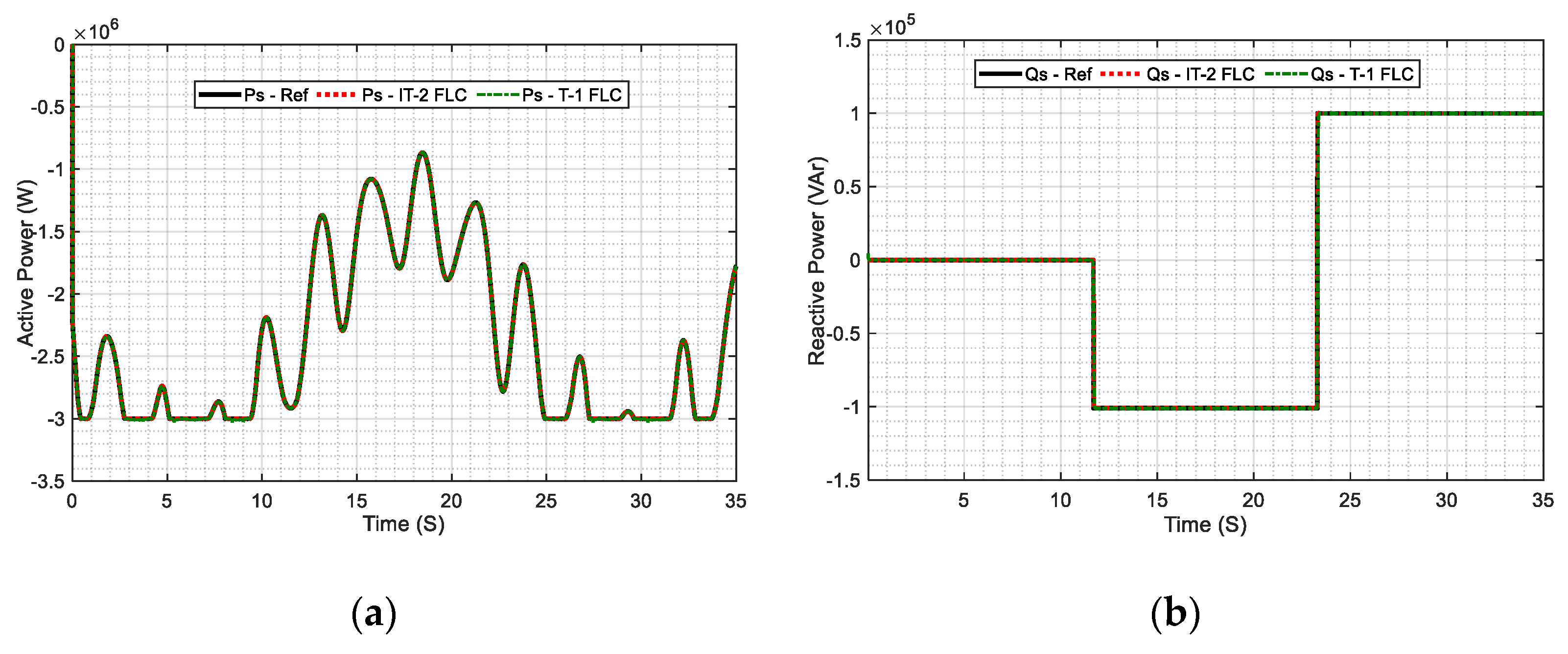
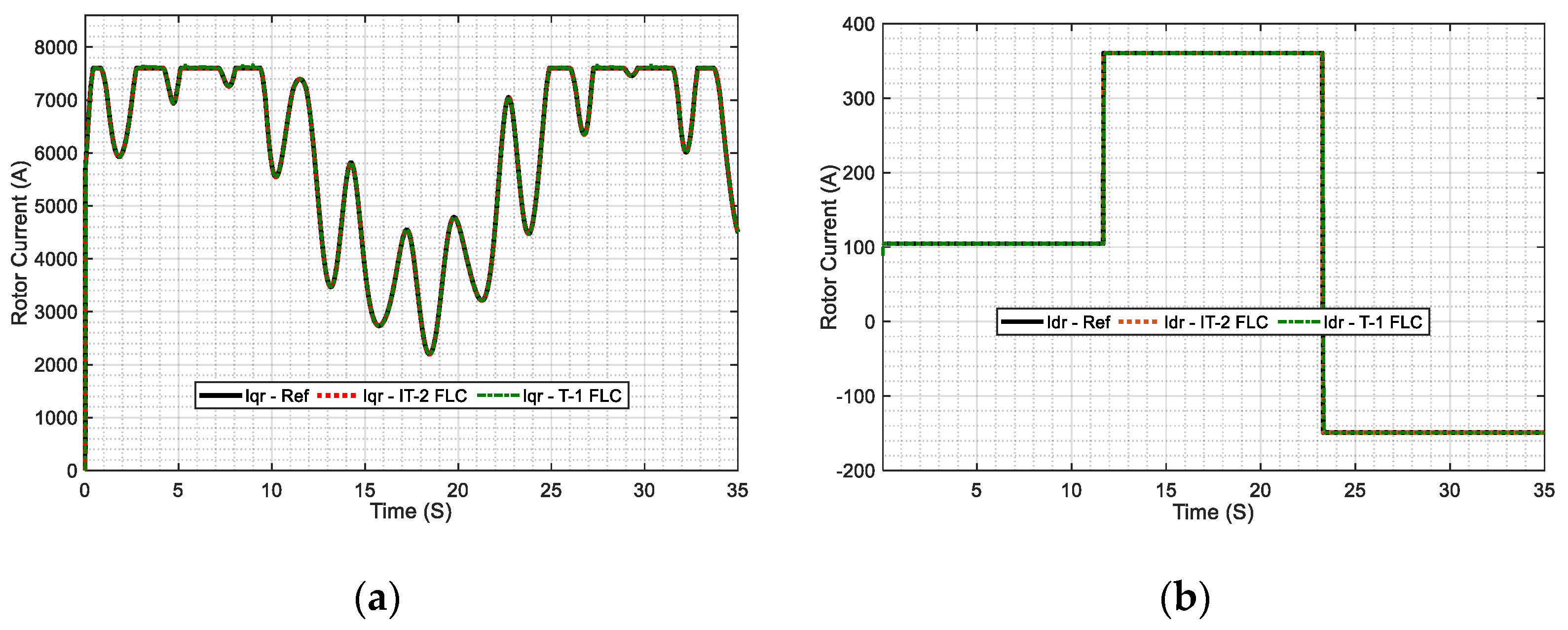
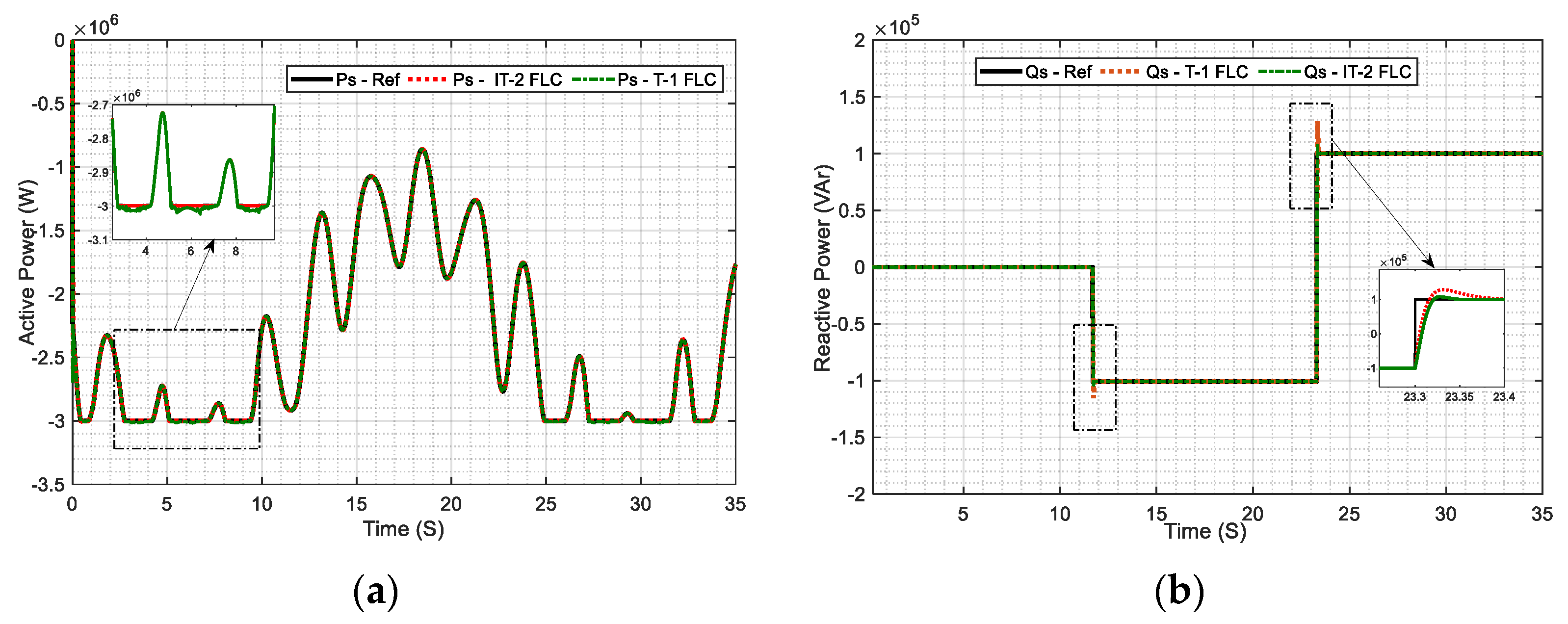
3.1. Reference Tracking
- -
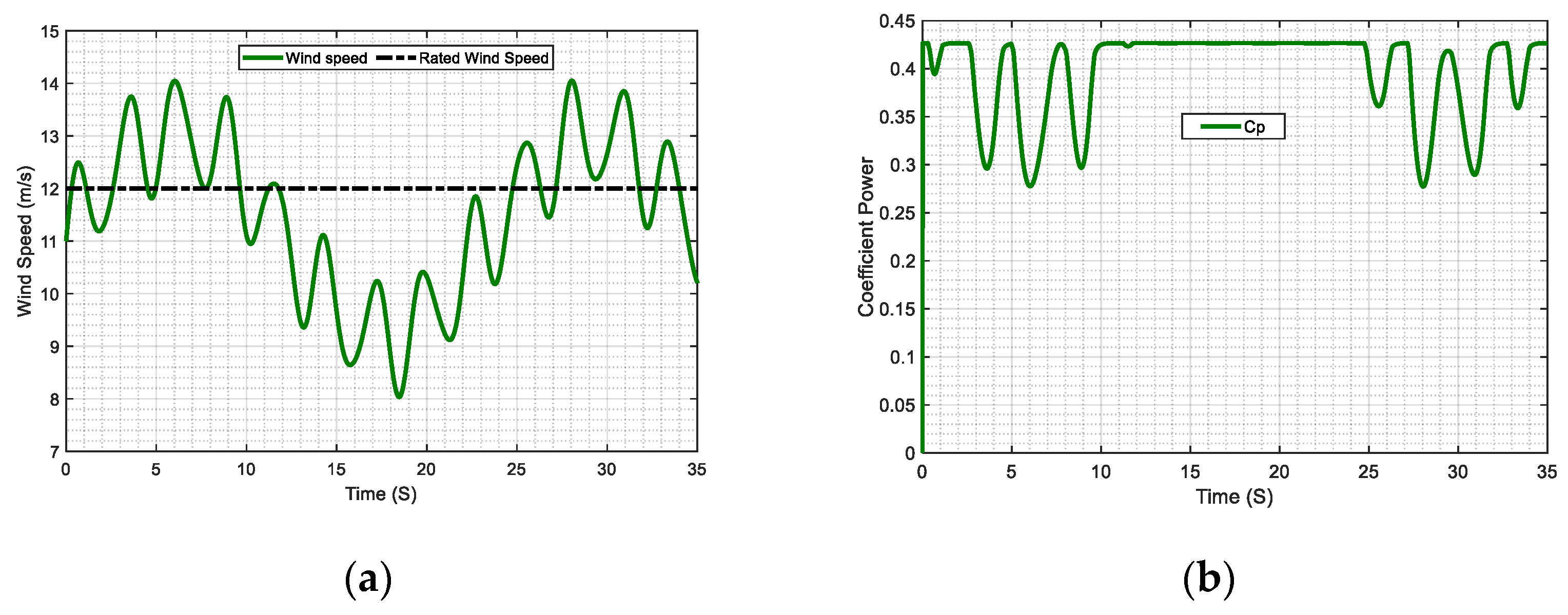
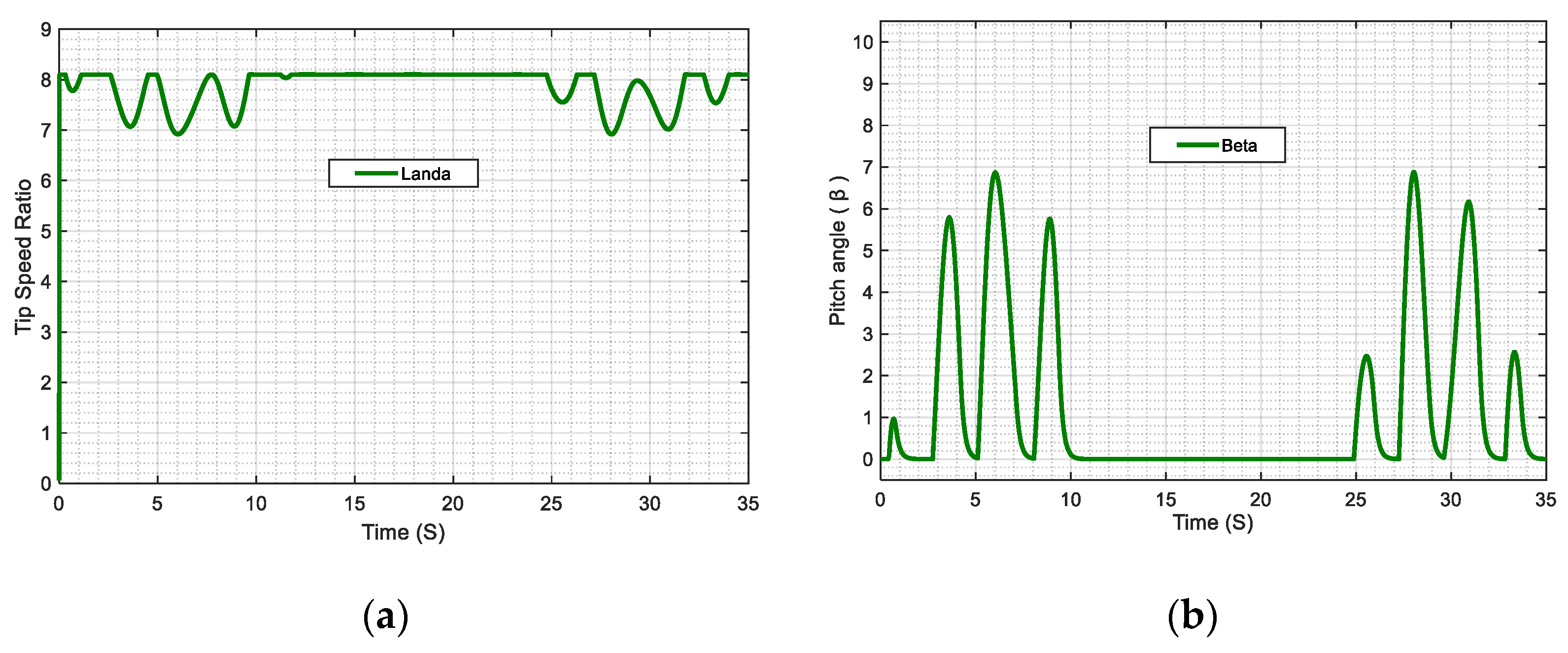
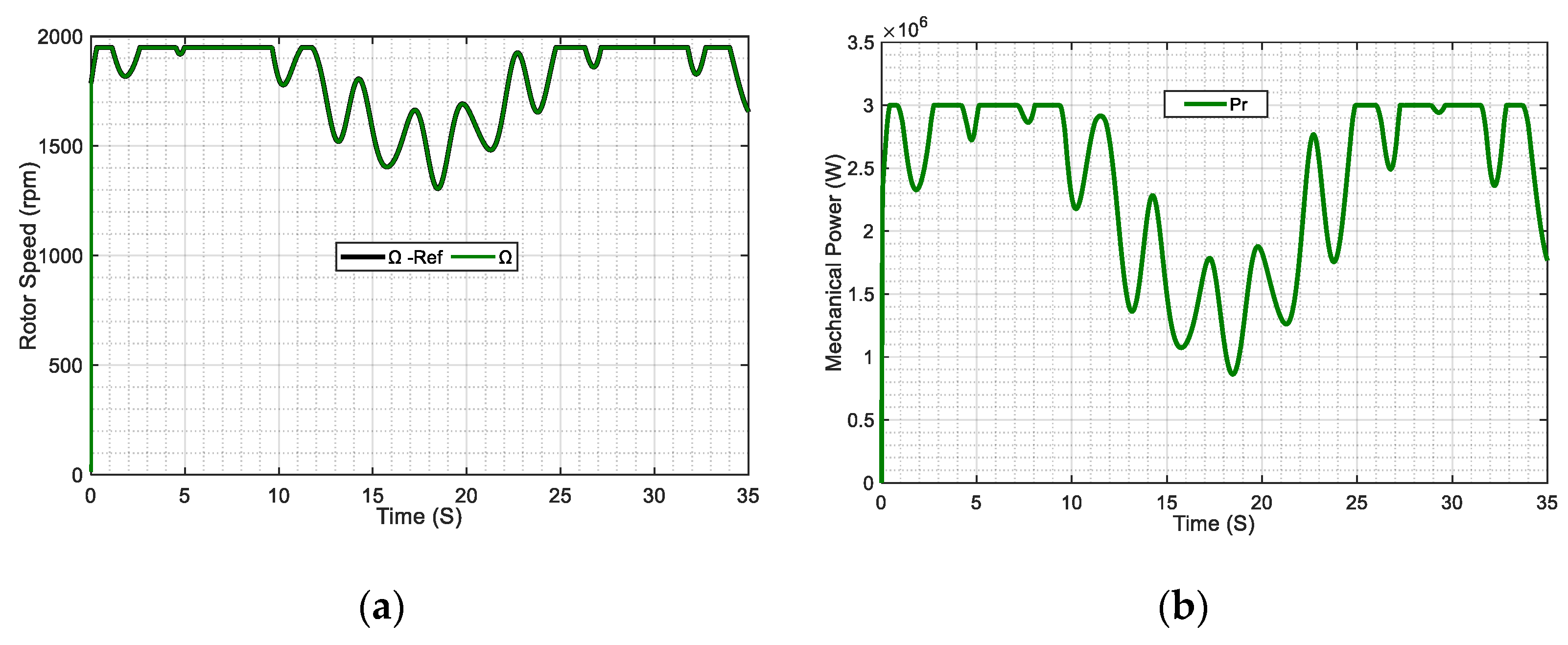
- Case 1: The wind turbine operated in the MPPT operating mode when the speed of wind was lower than the rated speed , therefore the wind turbine could generate the maximum power according to the specific wind speed.
- -
- Case 2: In high wind speeds, the pitch control started operating. Therefore, the pitch angle was increased in order to limit the captured wind energy to its nominal value.
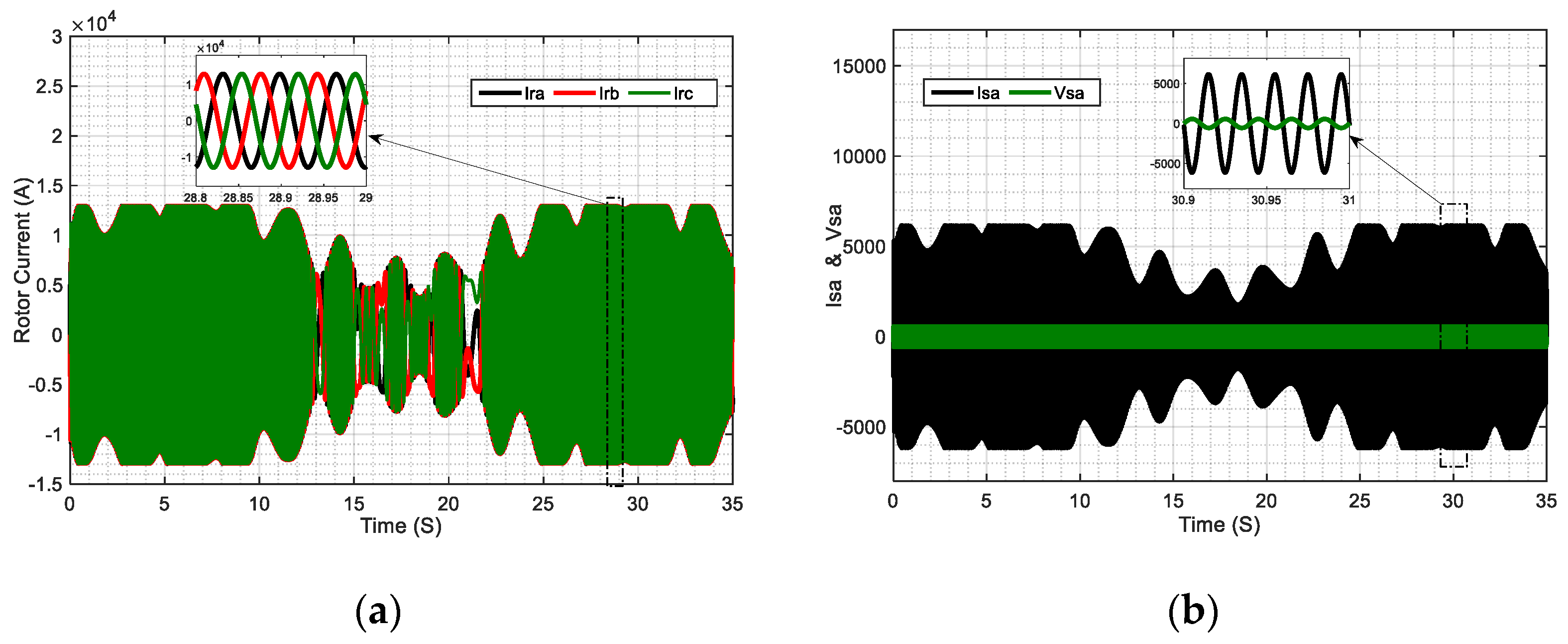
3.2. Robustness
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- ÓhAiseadha, C.; Quinn, G.; Connolly, R.; Connolly, M.; Soon, W. Energy and Climate Policy—An Evaluation of Global Climate Change Expenditure 2011–2018. Energies 2020, 13, 4839. [Google Scholar] [CrossRef]
- Flores-Granobles, M.; Saeys, M. Minimizing CO2 emissions with renewable energy: A comparative study of emerging technologies in the steel industry. Energy Environ. Sci. 2020, 13, 1923–1932. [Google Scholar] [CrossRef]
- Gargab, F.Z.; Allouhi, A.; Kousksou, T.; El-Houari, H.; Jamil, A.; Benbassou, A. A New Project for a Much More Diverse Moroccan Strategic Version: The Generalization of Solar Water Heater. Inventions 2021, 6, 2. [Google Scholar] [CrossRef]
- Moutchou, R.; Abbou, A.; Hemeyine, A.V. Control of the active and reactive powers of a permanent magnet synchronous generator using singular perturbations decouplage. In Proceedings of the 9th International Renewable Energy Congress (IREC), Hammamet, Tunisia, 20–22 March 2018; pp. 1–6. [Google Scholar]
- Rhaili, S.; Abbou, A.; Marhraoui, S.; El Hichami, N.; Hemeyine, A.V. Robustness investigation of Vector Control of Five-phase PMSG based Variable-Speed Wind Turbine under faulty condition. In Proceedings of the 2018 Renewable Energies, Power Systems & Green Inclusive Economy (REPS-GIE), Casablanca, Morocco, 23–24 April 2018; pp. 1–6. [Google Scholar]
- Khan, D.; Ansari, J.A.; Khan, S.A.; Abrar, U. Power Optimization Control Scheme for Doubly Fed Induction Generator Used in Wind Turbine Generators. Inventions 2020, 5, 40. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.M.; Kennel, R. Limited-Position Set Model-Reference Adaptive Observer for Control of DFIGs without Mechanical Sensors. Machines 2020, 8, 72. [Google Scholar] [CrossRef]
- Kaloi, G.S.; Baloch, M.H.; Kumar, M.; Soomro, D.M.; Chauhdary, S.T.; Memon, A.A.; Ishak, D. An LVRT Scheme for Grid Connected DFIG Based WECS Using State Feedback Linearization Control Technique. Electronics 2019, 8, 777. [Google Scholar] [CrossRef] [Green Version]
- Hemeyine, A.V.; Abbou, A.; Tidjani, N.; Mokhlis, M.; Bakouri, A. Robust takagi sugeno fuzzy models control for a variable speed wind turbine based a DFI-generator. Int. J. Intell. Eng. Syst. 2020, 13, 90–100. [Google Scholar] [CrossRef]
- Xiong, L.; Li, P.; Li, H.; Wang, J. Sliding Mode Control of DFIG Wind Turbines with a Fast Exponential Reaching Law. Energies 2017, 10, 1788. [Google Scholar] [CrossRef] [Green Version]
- Hemeyine, A.V.; Abbou, A.; Bakouri, A.; Labbadi, M.; El Moustapha, S.M.o.M. Power Control for Wind Turbine Driving a Doubly Fed Induction Generator using Type-2 Fuzzy Logic Controller. In Proceedings of the 7th International Renewable and Sustainable Energy Conference (IRSEC), Agadir, Morocco, 27–30 November 2019; pp. 1–6. [Google Scholar]
- Rocha-Osorio, C.; Solís-Chaves, J.; Casella, I.R.; Capovilla, C.; Puma, J.A.; Filho, A.S. GPRS/EGPRS standards applied to DTC of a DFIG using fuzzy—PI controllers. Int. J. Electr. Power Energy Syst. 2017, 93, 365–373. [Google Scholar] [CrossRef]
- Sami, I.; Ullah, S.; Ali, Z.; Ullah, N.; Ro, J.-S. A Super Twisting Fractional Order Terminal Sliding Mode Control for DFIG-Based Wind Energy Conversion System. Energies 2020, 13, 2158. [Google Scholar] [CrossRef]
- Prajapat, G.P.; Bhui, P.; Kumar, P.; Varma, S. Estimation based Maximum Power Point Control of DFIG based Wind Turbine Systems. In Proceedings of the IEEE PES GTD Grand International Conference and Exposition Asia (GTD Asia), Bangkok, Thailand, 19–23 March 2019; pp. 673–678. [Google Scholar]
- Bakouri, A.; Mahmoudi, H.; Abbou, A. Intelligent control for doubly fed induction generator connected to the electrical network. Int. J. Power Electron. Drive Syst. 2016, 7, 688–700. [Google Scholar] [CrossRef]
- Hemeyine, A.V.; Abbou, A.; Tidjani, N.; Mokhlis, M.; Bakouri, A. Takagi Sugeno Fuzzy Models for Wind Turbine Driving a DFI-Generator via Linear Matrix Inequalities. In Proceedings of the 5th International Conference on Renewable Energies for Developing Countries (REDEC), Marrakech, Morocco, 24–26 March 2020; pp. 1–6. [Google Scholar]
- Naik, K.A.; Gupta, C.P. Performance comparison of type-1 and type-2 fuzzy logic systems. In Proceedings of the 4th International Conference on Signal Processing, Computing and Control (ISPCC), Solan, India, 21–23 September 2017; pp. 72–76. [Google Scholar]
- Pramanik, T.; Samanta, S.; Sarkar, B.; Pal, M. Fuzzy f-tolerance competition graphs. Soft Comput. 2017, 21, 3723–3734. [Google Scholar] [CrossRef]
- Lathamaheswari, M.; Nagarajan, D.; Kavikumar, J.; Phang, C. A review on type-2 fuzzy controller on control system. J. Adv. Res. in Dyn. Control Syst. 2018, 10, 430–435. [Google Scholar]
- Bai, Y.; Wang, D. On the Comparison of type-1 and Interval type 2 Fuzzy Logic Controllers Used in a Laser Tracking System. IFAC-PapersOnLine 2018, 51, 1548–1553. [Google Scholar] [CrossRef]
- Naik, K.A.; Gupta, C.P.; Fernandez, E. Design and implementation of interval type-2 fuzzy logic-PI based adaptive controller for DFIG based wind energy system. Int. J. Electr. Power Energy Syst. 2020, 115, 105468. [Google Scholar] [CrossRef]
- Yassin, H.; Hanafy, H.; Mohab, M. Enhancement Low-voltage Ride Through Capability of Permanent Magnet Synchronous Generator-based Wind Turbines Using Interval Type-2 Fuzzy Control. IET Renew. Power Gener. 2016, 10, 339–348. [Google Scholar] [CrossRef]
- Kumbasar, T. A simple design method for interval type-2 fuzzy PID controllers. Soft Comput. 2014, 18, 1293–1304. [Google Scholar] [CrossRef]
- LathaMaheswari, M.; Nagarajan, D.; Kavikumar, J.; Broumi, S. Triangular interval type-2 fuzzy soft set and its application. Complex Intell. Syst. 2020, 6, 531–544. [Google Scholar] [CrossRef]
- Raju, S.K.; Pillai, G.N. Design and Implementation of Type-2 Fuzzy Logic Controller for DFIG-Based Wind Energy Systems in Distribution Networks. IEEE Trans. Sustain. Energy 2015, 7, 345–353. [Google Scholar] [CrossRef]
- Hamza, M.F.; Yap, H.J.; Choudhury, I.A. Recent advances on the use of meta-heuristic optimization algorithms to optimize the type-2 fuzzy logic systems in intelligent control. Neural. Comput. Appl. 2017, 28, 979–999. [Google Scholar] [CrossRef]
- Taskin, A.; Kumbasar, T. An Open Source Matlab/Simulink Toolbox for Interval type-2 Fuzzy Logic Systems. In Proceedings of the IEEE Symposium Series on Computational Intelligence, Cape Town, South Africa, 7–10 December 2015; Volume 1, pp. 1561–1566. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error | |||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | EZ | PS | PM | PB | |
| NB | NB | NB | NB | NB | NM | NS | EZ |
| NM | NB | NB | NB | NM | NS | EZ | PS |
| NS | NB | NB | NM | NS | EZ | PS | PM |
| EZ | NB | NM | NS | EZ | PS | PM | PB |
| PS | NM | NS | EZ | PS | PM | PB | PB |
| PM | NS | EZ | PS | PM | PB | PB | PB |
| PB | EZ | PS | PM | PB | PB | PB | PB |
| Parameters | Values |
|---|---|
| Radius of the blades | |
| Gear ratio | |
| Total Inertia | |
| Friction coefficient |
| Parameters | Values |
|---|---|
| Rated power | |
| Frequency | |
| Stator voltage | |
| Stator inductance | |
| Stator resistance | |
| Rotor resistance | |
| Rotor inductance | |
| Mutual inductance | |
| Number of pole pairs |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hemeyine, A.V.; Abbou, A.; Bakouri, A.; Mokhlis, M.; El Moustapha, S.M.o.M. A Robust Interval Type-2 Fuzzy Logic Controller for Variable Speed Wind Turbines Based on a Doubly Fed Induction Generator. Inventions 2021, 6, 21. https://doi.org/10.3390/inventions6020021
Hemeyine AV, Abbou A, Bakouri A, Mokhlis M, El Moustapha SMoM. A Robust Interval Type-2 Fuzzy Logic Controller for Variable Speed Wind Turbines Based on a Doubly Fed Induction Generator. Inventions. 2021; 6(2):21. https://doi.org/10.3390/inventions6020021
Chicago/Turabian StyleHemeyine, Ahmed Vall, Ahmed Abbou, Anass Bakouri, Mohcine Mokhlis, and Sidi Mohamed ould Mohamed El Moustapha. 2021. "A Robust Interval Type-2 Fuzzy Logic Controller for Variable Speed Wind Turbines Based on a Doubly Fed Induction Generator" Inventions 6, no. 2: 21. https://doi.org/10.3390/inventions6020021
APA StyleHemeyine, A. V., Abbou, A., Bakouri, A., Mokhlis, M., & El Moustapha, S. M. o. M. (2021). A Robust Interval Type-2 Fuzzy Logic Controller for Variable Speed Wind Turbines Based on a Doubly Fed Induction Generator. Inventions, 6(2), 21. https://doi.org/10.3390/inventions6020021